
Abstract
Tunnel Boring Machines (TBMs) have been used in many underground coal mines in China with high constructive efficiency, sound equipment integration and low cost. A recent application of TBM in Yuandian No.2 Coal Mine in Huaibei, China, has shown that the surrounding rockmass spalled severely in stratum impacted by multiple joint sets. To analyze this problem, a new 3D ubiquitous-multiple-joint (UMJ) model was proposed in the present research, which comprised a rock matrix and multiple sets of joints according to geological conditions. Then, the yielding and deformation of the roadway excavated by TBM were analyzed. The results showed that the plastic zones, stress states and displacement of surrounding rockmass were significantly affected by the orientation of joint sets. The results could well indicate failure characteristics of the in-situ roadway and showed the advantages of UMJ model to simulate the excavation in jointed rockmass. The key factors influencing the roadway stability were discussed by the UMJ model. Based on the simulation results, suggestions on excavation-support schemes were proposed for TBM excavating roadways.
Highlights
-
3D Ubiquitous-Multiple-Joint model is proposed to handle rockmass with multiple joint sets
-
The stability of roadway is significantly affected by orientation and strength of joint sets
-
Some measures are suggested to control TBM excavated roadway in jointed stratum
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In the process of coal mining, it is necessary to construct a large number of roadways. Some parts of the roadways serve for transportation and ventilation during the entire mining for more than 50 years. Thus, they are usually constructed by hard rockmass. Hard rock roadways in the underground coal mines are usually excavated by roadheaders which are of low construction efficiency and high project cost. As an alternative, the hard rock Tunnel Boring Machines (TBMs) have been used in the construction of long and deep roadways during the last decade in China (Hu et al. 2020; Liu et al. 2016; Shi et al. 2017; Tang et al. 2018).
At present, the application of TBMs is still challenging in coal mines, because TBM is unfavorable to advance under adverse geological conditions (Zheng et al. 2016), such as the strata affected by joint sets. When TBM advances through jointed strata, the surrounding rockmass of roadways frequently collapse severely, which further leads to engineering accidents (Hu et al. 2020; Sun and Yang 2019). Thus, it is necessary to study the responses of jointed surrounding rockmass after being excavated by TBM.
Previous researches have showed that the jointed rocks have strength anisotropic characteristics. That is, the rock strength changes with the orientations of the joint planes (Duveau et al. 1998; Nasseria et al. 2003; Singh et al. 2002). Many researchers have proposed different models to predict strength characteristic and yielding modes of jointed rock masses. Wang et al. (2018a, b) proposed an anisotropic yielding criterion for jointed rock masses with a corresponding flow rule and potential function based on the theory of plastic mechanics. However, the model has 6 parameters, which are difficult to be determined. A more convenient method was proposed by introducing joint orientation-related strength parameters to the yielding criteria. Lee and Pietruszczak (2008) used the method to modify the Hoek–Brown failure criterion. In their model, the anisotropy of the strength was described through the orientation dependence of the strength parameters m and s, two functions of the bedding angle of jointed rocks. The coefficients in the two functions could be fitted by a series of direct shear tests or triaxial compression tests. Singh and Singh (2012) proposed a modified Mohr–Coulomb strength criterion. In the model, the anisotropy of strength is related to the uniaxial compressive strengths (σcj) and friction angle (ϕj0) of the jointed rocks with different joint inclinations. The authors advocated use of several approaches available in literature that correlate σcj with joint orientation. Another method for jointed rock was established by embedding a single joint plane into the intact rock (Hoek 1983; Ismael and Konietzky 2017, 2019; Xu et al. 2017). In the model, the failure criteria were assigned to the intact rock and joint plane, respectively. When stresses were applied on the jointed rock, the stress states in the intact rock and on the joint plane would be calculated, respectively. Then, the jointed rock could be judged according to the failure criteria for the intact rock or joint plane, respectively. By this method, the ITASCA Consulting Group developed the Ubiquitous-Joint model and implemented it in the FLAC3D 6.0 (Itasca 2017). Some researchers used the model to analyze the geotechnical problems affected by a single joint set (Sainsbury and Sainsbury 2017; Sun and Yang 2019). Actually, multiple joint sets commonly exist in the rock masses, indicating that the Ubiquitous-Joint model with a single joint set may not be applicable. On the basis, some researchers proposed 2D models with multiple distributed joint sets under plane stresses or strains (Chang and Konietzky 2018; Wang and Huang 2009, 2013). Furthermore, Agharazi (2013) proposed a 3D Ubiquitous-Joint model, which is more suitable to simulate the process of roadway excavation. However, the strength parameters such as cohesions, frictions, dilations of intact rock or joints were assumed to be constants when plastic strains occurred, which is not consistent with the actual strength properties.
Based on previous research, this paper will propose a modified 3D model defined as the Ubiquitous-Multiple-Joint Model. In the model, multiple distributed joint sets will be considered and the strength parameters will decrease with plastic strains. Then, stability analysis of the roadway excavated by TBM will be conducted in the jointed strata by the established model. Besides, the effects of TBM excavation-support schemes on the roadway stability will be discussed, and some measurements will be developed to ensure the stability of the surrounding rockmass in joint-affected strata.
2 Project Background
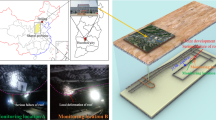
Yuandian No.2 Coal Mine is located in the north of Bozhou city, Anhui province of China. In 2019, the mine introduced a hard rock TBM to construct two roadways: west horizontal rail haulage entry and west rail haulage rise, for the 7th mining area. Figure 1 shows the profiles of the two roadways. The horizontal entry has a length of 1900 m, and the haulage rise is 1200 m. The diameters of two roadways are both 4.88 m.

Profiles of the two roadways (a) the layout of the roadways (b) the geological conditions along the designed roadways from historical and surface drilling surveys
The geological conditions varied greatly along the roadway axis, as shown in Fig. 1b. After excavation, the stability of roadway was different under various geological conditions. When the rockmass had high strength and integrity, the roadway was usually intact after excavation as shown in Fig. 2a. However, affected by joint sets, the rockmass collapsed severely around roof and sidewalls, as shown in Fig. 2b, which is common throughout the construction. More seriously, the rock masses usually had 2–3 joint sets. In this paper, a typical segment from G34 + 25 m to G34 + 45 m was chosen, as shown in Fig. 2b. It can be found that three sets of joints (J1, J2, J3-1 and J3-2) existed (Fig. 3 and Table 1). The average strikes of J1 and J2 were about WS323° and WS152°, respectively, while the average strikes of J3-1 and J3-2 were WS49° and WS232°, respectively. Additionally, the strike of the roadway was WS317°, indicating that the strikes of J1 and J2 were almost parallel to the axis of the roadway, and the strikes of J3-1 and J3-2 were almost perpendicular to the roadway axis. In Fig. 2b (G34 + 32 m), the roadway in this section was damaged severely under the influence of the three joint sets. It shows that joint sets in the rock masses are unfavorable for the construction of roadways. The present study aims to numerically research how multiple joint sets affect the stability of roadway after excavation by TBM.

Roadway outline after excavation in (a) the rock masses had high strength and integrity (b) the rock masses affected by joint sets (token from G34 + 32 m)

Schmidt concentrations percentage of total per 1.0% between G34 + 25 m and G34 + 45 m
3 The Ubiquitous–Multiple-Joint Model
3.1 Model Description and Coordinate Systems
In this study, the Ubiquitous–Multiple–Joint (UMJ) model was established based on the finite difference method and implemented in the software of FLAC3D 6.0. It was composed of an intact matrix and one to three joint planes (joint sets). It connected the rock matrix and joint planes by global and local coordinate systems, as shown in Fig. 4. The global coordinate system was defined by the eastern direction (x-axis), the northern direction (y-axis), and the up direction (z-axis), according to the Cartesian system in the right-handed rule. The joint plane orientations were given by the Cartesian components of a unit normal to the plane in the global x-, y- and z-axes. The local coordinate system in a joint plane was defined by the dip (x′-axis), the strike (y′-axis) and the unit normal to the plane (z′-axis). The dip angle (α) was measured from the global xy-plane, which was positive down. Besides, the striking angle is the angle between the positive y′-axis and positive x-axis on the xy-plane (positive clockwise from y′-axis).

The coordinate systems in the Ubiquitous–Multiple–Joint model: (a) global coordinate system and (b) local coordinate system
3.2 Stress Components in the Local and Global Systems
The components of a tensor in the local system could be transformed from its components in the global system by a rotation matrix [C] with three columns of the direction cosines of x′, y′ and z′. Consequently, the stress components in the local axes could be calculated by the transformation:
In turn, the stress components in the global system could be obtained from the local components using the reverse transformation:
The shear stress τji on the ith joint plane could be computed from the stress tensor [σ]′, and the expression is
where σ1′3′ and σ2′3′ are components of [σ]′ on the joint plane. The shear strain γji on the ith joint plane was consequently expressed as
where ε1′3′ and ε2′3′ are components on the joint plane.
3.3 Elastic Relationships
The deformations of both rock matrix and joint planes were assumed to follow Hooke law in the elastic stage. The incremental elastic constitutive function for rock matrix was expressed as (Itasca 2017)
where α1 is a material constant related to the bulk modulus (K) and shear modulus (G) of rock matrix, which could be expressed as:
Itasca (2017) has given the elastic strain–stress relation in single plane. Then, the incremental elastic strain–stress relations used for the ith joint plane were expressed as:
3.4 Plastic Relationships
The failure criterion for rock matrix in the UMJ model was a composite Mohr–Coulomb criterion with tension cutoff (Itasca 2017). The corresponding envelope was expressed in terms of σ1–σ3, as shown in Fig. 5. In this model, σ1, σ2 and σ3 represented the maximum, intermediate and minimum principal stress, respectively, and the compressive stress was positive. The failure envelope f s m(σ1,σ3) = 0 was defined from point A to B by the Mohr–Coulomb criterion for shear failure with the expression of

Composite Mohr–Coulomb criterion for rock matrix
and from B to C by a tension failure criterion of the form f t m(σ1,σ3) = 0, with the expression of
where Nϕm = (1 + sinϕm)/(1 − sinϕm) and ϕm is the friction of the rock matrix, cm is the cohesion strength, σt m is the tensile strength, and its maximum is σt m = cm/tanϕm.
The potential functions of the rock matrix consisted of two functions: gs m(σ1,σ3) = 0 for the definition of shear flow and gt m(σ1,σ3) = 0 for the definition of tensile flow, respectively (Itasca 2017). The former corresponded to a non-associative law with the expression of
where Nψm = (1 + sinψm)/(1 − sinψm) and ψm is the dilation angle of the rock matrix. The latter corresponded to an associative law with the expression of
The failure criterion for the ith joint plane in the UMJ model was also a composite Mohr–Coulomb criterion with tension cutoff. The corresponding envelope for the ith joint plane was expressed in terms of σ3′3′-τji, as shown in Fig. 6. The failure envelope fjis(σ3′3′, τji) = 0 was defined from point A to B by the Mohr–Coulomb criterion for shear failure with the expression of

Composite Mohr–Coulomb criterion for joint plane
and from B to C by a tension failure criterion of the form fjit(σ3′3′, τji) = 0 with the expression of
where ϕji, cji and σt ji represent the friction, cohesion and tensile strength of the ith joint plane, respectively. The maximum value of σt ji is σt ji = cji/tanϕji.
The potential functions for the ith joint plane consisted of two functions: gjis(σ3′3′, τji) = 0 for the definition of shear flow and gjit(σ3′3′, τji) = 0 for tensile flow, respectively. The former function corresponded to a non-associative law with the expression of
where ψji is the dilation angle of the ith joint plane. The function gjit(σ3′3′, τji) = 0 corresponded to an associative law with the expression of
3.5 Post-Failure Behavior
Previous experimental studies showed that the post-strength for rock mass always decreased from peak strength to the residual one, and the strength parameters decreased to residual values with the accumulation of plastic strain (Li et al. 2019; Mishra and Nie 2013; Tian et al. 2014; Tutluoğlu et al. 2014). Therefore, the strength parameters in the UMJ model were assumed to decrease after yielding to capture the post-failure behavior. In the proposed model, the bulk and shear modulus were constant, while other parameters were assumed to decrease with the plastic parameter κ used by Itasca (2017). The shear yielding of elements was the square root of the second invariant of the incremental plastic shear strain deviator tensor. The tensile yielding was the plastic tensile strain increment. The parameters for the rock matrix were κs m and κt m, describing shear softening and tensile softening, respectively. While plastic parameters for the joint planes were κs j and κt j, describing shear softening and tensile softening of joints, respectively.
Once shear or tensile failure occurred in the rock matrix, cohesion, friction, dilation and tensile strength decreased as functions of κs m and κt m, which could be expressed as
Once shear or tensile failure occurred on the ith joint plane, cohesion, friction, dilation and tensile strength decreased as functions of κs ji and κt ji, which could be expressed as
These functions could be defined by users in the form of tables. As shown in Fig. 7, each table contained pairs of values for the mechanical parameters and the corresponding plastic parameters. It was assumed that the properties varied linearly between two consecutive plastic parameters. The softening of joint properties was described in a similar way.

The form of user-defined function, taking cm as an example
3.6 Numerical Implementation
In general, numerical implementation of the UMJ model was based on the finite difference method and calculated by elastic guess and plastic correction (Itasca 2017) in the rock matrix and on joint planes for each step. Mechanical parameters of the rock matrix and joint planes were firstly assigned. The stress states were then calculated in the global system based on the elastic guess. Relevant plastic corrections were made if the rock matrix was analyzed for shear or tensile failure. In this model, based on Chang and Konietzky (2018), the stress state on the joint plane of the 1st joint set was firstly handled. If plastic correction was needed, the new stress state would be recalculated in the global system. After that, the stress state on the joint planes of the 2nd and 3rd joint set were handled in sequence. The detailed flow chart for calculation is shown in Fig. 8. Actually, the process of implementation was programmed by C++ and launched to a “.dll” file, which was moved into a specified system folder of FLAC3D 6.0. After that, the codes would automatically operate once the user started a simulation.

Numerical implementation procedure of UMJ model
3.7 Model Validation
Jaeger et al. (2007) have given the analytical prediction of the uniaxial compressive strength (UCS) of rock mass with a single joint plane, as shown in Fig. 9a. The weak-plane angle was defined as α1, and the UCS of the jointed rock could be predicted by Eq. (18).

Different verification models with (a) one joint set, (b) two joint sets, and (c) three joint sets
where k1 = 1 − tan(ϕj1)tan(α1), a parameter relative to the joint dip angle.
If jointed rocks had i (i = 1–3) inherent joint planes, the above parameters would be defined as ki = 1 − tan(ϕji)tan(αi). The corresponding UCS of the jointed rocks could be calculated by Eq. (19).
The UMJ model proposed in this study was validated by comparing numerical results simulated by FLAC3D 6.0 and analytical predictions calculated by Eq. (19). Parameters for validation are listed in Table 2. The models for validation in FLAC3D were cylinders, 50 mm in diameter and 100 mm in length. In the numerical testing, the loading rate was 1 × 10–4 mm per step. Figure 10 shows the comparisons. The comparisons showed high consistency between the two results.

Numerical and analytical results of different verification models with (a) one joint set or (b) two joint sets, or (c) three joint sets
The proposed model was also validated by the experimental results from Chang et al. (2019), who conducted many uniaxial compressive tests on the specimens with a single or two artificial joints. Figure 11a shows a typical sample with a single artificial joint with positive angle from vertical to joint plane. Three groups of specimens with different bedding angles (35°, 45°, 60°) were tested. As shown in Fig. 11b, the simulation results could well predict testing results. Figure 11c shows a typical sample with double artificial joints (the red joint and the blue joint). Five groups of specimens were tested with different combinations of J1 angle and J2 angle (J1/J2: − 30°/30°, 10°/70°, 30°/90°, 60°/120° and 75°/135°). The simulation results could also predict testing results, as shown in Fig. 11d. Additionally, Fig. 12 shows the comparisons of failure modes between the experimental results from Chang et al. (2019) and the simulation results. A single specimen from Chang et al. (2019) represented a single zone in the UMJ model (a Representative Elementary Volume, REV). Accordingly, the validation was conducted numerically by a single zone. It can be seen that the simulation results can capture the failure modes of experiments in some extent. The comparisons indicated that the proposed model could well capture the strength and failure characteristics of jointed rocks.

Comparison between the experimental results from Chang et al. (2019) and the simulation results (a) the specimen with single joint (Chang et al. 2019), (b) the comparison between simulation results and testing results when the specimen has single joint, (c) the specimens with double joints (Chang et al. 2019) and (d) the comparison between simulation results and testing results when the specimen has double joints

Comparison of the failure modes between the experimental results from Chang et al. (2019) and the simulation results (a) specimens with a single joint and (b) specimens with two single joints
It must be noted that the theory proposed by Jaeger et al. (2007) considered only a single joint, and the simples tested by Chang et al. (2019) contained only at most two single joints, which are ideal specimens. The comparison between the UMJ model and theory and experiments is limited and reasonable in some extent. The model needs to be experimentally validated in real, large scale rockmass in the future.
4 Numerical Modeling Scheme
4.1 Numerical Model
The numerical model, with a length of 60 m, a width of 50 m, and a height of 50 m, had a total of 187,000 elements, as shown in Fig. 13. The roadway was set at the center of the model with a diameter of 4.88 m. In the model, the stratum was simplified to have a single type of rock mass.

Numerical model in this study
The information of initial in-situ stresses was supplied by the mine. The maximum and minimum principal stresses were parallel and perpendicular to the axis of the roadway, and were set as 27.9 MPa and 16.8 MPa, respectively. The intermediate principal stress was set as 19.5 MPa. The right, upper and rear boundaries were set free under normal stresses of 16.8 MPa, 19.5 MPa and 27.9 MPa, respectively. The remaining boundaries were fixed to their normal displacement. Finally, the density was set as 2600 kg/m3 and the gravity was 9.8 m/s2.
4.2 The Method of Numerical Simulation of Excavation
The distributions of plastic zones in surrounding rockmass are related to the stress variation caused by excavation because the rock masses are elastoplastic materials. Some studies (Cai 2008; Sun and Yang 2019) showed the distributions of plastic zones are affected by numerical excavation schemes. In the field, TBM slowly advanced in rock masses by cutting rocks by its cutter. Considering this, Cai (2008) suggested two methods of simulating full-face TBM tunneling: excavation relaxation and material softening methods. The latter is to degrade Young’s modulus of the elements to zero over a few steps to simulate the gradual excavation effect (Cai 2008). By method suggested by Cai (2008), the roadway was excavated by linearly reducing the bulk modulus, shear modulus, stresses and densities of the zones within 1000 steps, shown in Table 3.
4.3 Properties of Joint Sets and the Rock Matrix
In the simulation, the jointed stratum was simulated by the UMJ model, while the stratum with high integrity was simulated by the Mohr–Coulomb model in FLAC3D 6.0 (Itasca 2017). Three joint sets with different orientations were considered according to the statistical data in Fig. 3. The orientations are listed in Table 4. The in-situ joint sets were too weak to sample for the laboratory testing, so it was hard to obtain the real mechanical parameters of the rock matrix and joints for the simulation. Therefore, their parameters were determined by referring to the geological reports from the mine and the literatures. The parameters of the rock matrix were obtained according to the parameters of sandy-mudstone from Zhang et al. (2014). The friction angles of joints were chosen by referring to the parameters from Sun and Yang (2019) and Sainsbury and Sainsbury (2017). The dilations for the rock matrix and joints were fixed according to Hoek and Brown (1997). The authors suggested that the dilation angle should be 12.5% of friction angle for average quality rock mass with a Geological Strength Index (GSI) of 50. In situ, the GSI for jointed rock mass was between 40 and 60. Thus, 12.5% of the friction angle was set as the dilation angle. The cohesions of joints were 1% of those of rock matrix. Besides that, joint tensions were assumed to be 40% of joint cohesions by referring to Sainsbury and Sainsbury (2017). Among these parameters, the cohesions and tensile strengths of the rock matrix and joints decreased with plastic strain, while other parameters were constant. The tensile strengths were assumed to drop to zero immediately after tensile yielding, while the plastic shear strain threshold was 1%, after which, the cohesion dropped to its residual value. Table 4 shows the parameters, and the parameters for the rock matrix were also used for the models with Mohr–Coulomb criterion. It must be mentioned that the mechanical properties in this example are referred to other literature rather than in-situ data, and the case study is presented as a conceptual demonstration of the use of the model.
4.4 Excavation-Support Schemes in the Model
The open-type TBM was used in this project to excavate roadways, and support in the roof and sidewalls were installed in area A and area B simultaneously, as shown in Fig. 14. In Fig. 14a, c, support in the roof was installed in area A, about 2–4 m behind the excavating face, indicating that a range of roof had no support. In Fig. 14b, c, support in sidewalls was installed in area B, at the rear of the TBM, about 50 m behind the excavating face. It must be noted that the roadway between area A and B was supported only in the roof. Only the roadway behind area B was supported both in roof and sidewalls, as shown in Fig. 15.

Relationship between TBM and supports

Support schemes: (a) cross-section of supports in area A, (b) cross-section of supports in area B, (c) flat-section of bolts and cables in driving direction of the TBM
The complete support structures were the combinations of cables, bolts and shotcrete. In area A, cables and bolts were used to support the roof. The cables were 17.8 mm in diameter and 6300 mm in length, and the row and line spacing were 1600 mm and 2000 mm, respectively. The bolts were 22 mm in diameter and 2600 mm in length, and both row and line spacing were 800 mm. In area B, the bolts were used to support the sidewalls, and finally the shotcrete (100 mm in thickness) was sprayed to the surface of roadways (Table 5).
In the numerical model, the excavation of a 40 m roadway between area A and area B was simulated. The excavation-support schemes are shown in Fig. 16. In the schemes, the length of each excavation was 1.6 m, and the length of the non-support area was 3.2 m. The specific schemes are as follows:

Excavation-support schemes in the model
- Step 1::
-
Excavate the roadway with a length of 1.6 m;
- Step 2::
-
Solve the model to equilibrium;
- Step 3::
-
If the length from the front boundary to the excavation face was larger than or equal to 3.2 m, execute the next step, if not, execute Step 1;
- Step 4::
-
Install the support structures. Support structures were simulated by the cable structure embedded in FLAC3D 6.0, whose parameters are listed in Table 6;
Table 6 Parameters for bolts and cables - Step 5::
-
Solve the model to equilibrium, and conduct the next excavation-support cycle.
5 Simulation Results
5.1 Plastic Zones Along the Direction of Excavation
The plastic zones along the roadway axis in jointed rock masses are shown in Fig. 17a. As a comparison, the plastic zones calculated by Mohr–Coulomb model are shown in Fig. 17b. It can be found that the plastic zones calculated by the UMJ model were larger than that calculated by Mohr–Coulomb model. Besides that, the modes of plastic zones in the jointed surrounding rockmass are more complex, and this will be discussed in the next section. Figure 17a, b shows four cross-sections along the direction of excavation, respectively. The range of plastic zones in Fig. 17a gradually became smaller with the increase of L, while it was almost constant with the increase of L in Fig. 17b. It indicated that the jointed surrounding rockmass was disturbed by the TBM excavation process, even if it was far away from excavating face.

The 3-dimensional plots of yielding zones calculated by the Mohr–Coulomb model and the Ubiquitous-Multiple-Joint Model
5.2 Yielding Modes in the Jointed Surrounding Rockmass
In this study, the cross-section of 9.8 m behind the front boundary with no support was selected for analysis. Figure 17 shows the distribution of plastic zones in surrounding rockmass simulated by the UMJ model. For comparison, the result simulated by the Mohr–Coulomb model was also plotted. In the jointed surrounding rockmass, the maximum depth of plastic zones was about 4.64 m. The yielding modes of plastic zones were complex, including joint shear, joint tensile and rock matrix shear plastic zones. In the plastic zones, the joint shear of the 1st and 2nd joint sets were dominant. The joint shear plastic zones distributed as a “+”-shape and extended perpendicular to the joint planes. Besides, the joint tensile zones occurred near the roadway surface and also extended perpendicular to the 1st and 2nd joint planes. In this simulation, the tensile strength dropped to zero after tensile yielding. It can be found that the tensile plastic zones are similar with the spalled zones in the field, as shown in Fig. 18. According to the results calculated by the Mohr–Coulomb model, the plastic zones in the surrounding rockmass were only rock matrix shear yielding modes, which were distributed as a circular region. Compared with the UMJ model, the Mohr–Coulomb model couldn’t capture the characteristics of jointed rocks.

Yielding zones calculated by the Ubiquitous-Multiple-Joint Model and the Mohr–Coulomb model
5.3 Stress States in the Jointed Surrounding Rockmass
Figure 19 shows the maximum and minimum principle stresses in the jointed surrounding rockmass after excavation. The result simulated by the Mohr–Coulomb model was also plotted for comparison. It shows that the maximum and minimum principal stresses decreased significantly in the direction perpendicular to the joint planes, which is shown as a “+”-shaped region. The region had the depth of more than 5 m from roadway surface and the shape was similar with the plastic zones, as shown in Fig. 18. However, the region where maximum and minimum principal stresses decreased was smaller and more regular in the surrounding rockmass simulated by Mohr–Coulomb model. The region had the depth of about 2 m and is shown as a circular shape.

Principal contour calculated by the Ubiquitous-Multiple-Joint Model and the Mohr–Coulomb model
Figure 19 shows the minimum and maximum principal stress tensors in jointed surrounding rockmass, together with the result simulated by the Mohr–Coulomb model. It should be noted that the initial maximum principal stress was parallel to the direction of TBM excavation, while the initial minimum principal stress was perpendicular. In jointed surrounding rockmass, the direction of the maximum principal stress around the ‘Areas a’ to ‘Areas b’ was perpendicular to the joint planes, as shown in Fig. 20. The direction of the minimum principal stress was also changed, pointing to the radial direction of roadway. It can be found that the change of directions of the maximum and minimum principal stresses is complex. However, the change in the results from Mohr–Coulomb Model is regular. It shows that the maximum and the minimum principal stresses redistributed to the tangential direction around the roadway, and the radial direction, respectively. The comparison indicates that excavation in surrounding rockmass leads to significant stress redistribution.

Stress tensors calculated by the Ubiquitous–Multiple–Joint Model and the Mohr–Coulomb Model
5.4 Displacement Distribution in the Jointed Surrounding Rockmass
Figures 20, 21 shows the displacement contours and the vectors of the surrounding rockmass simulated by the UMJ model and Mohr–Coulomb model. The comparison of radial displacement on the roadway surface is illustrated in Fig. 22. As can be seen, the surrounding rockmass squeezed evenly along the radial direction of the roadway if the rock masses were not affected by joints. Otherwise, the radial displacement would be larger along the roadway surface. The displacement of roadway surface was more significant in the direction perpendicular to the joint planes.

Displacement contours and vectors calculated by the Ubiquitous-Multiple-Joint Model and the Mohr–Coulomb Model

Radial displacement in roadway wall calculated by Mohr–Coulomb Model and Ubiquitous-Multiple-Joint Model
6 Discussions
6.1 Evolution of Plastic Zones in the Jointed Surrounding Rockmass
A new model for simulation was established based on the previous models, as shown in Fig. 13. The normal displacement of its rear boundary was fixed. Besides, the distance from the rear to the front boundary was set as 0.8 m, while other boundaries were the same. The 1st and 2nd joint sets were set in the model. Additionally, the roadway was not supported after excavation. It was excavated by linearly decreasing mechanical parameters to 0 within 1000 steps. After that, the model was solved another 3000 steps. Figure 23 shows the average force ratio within 4000 steps. It indicates that the model was in equilibrium after 4000 steps.

Average force ratio within 4000 steps
Figure 24 illustrates the plastic zones of different yielding modes under different steps. The results showed that no tensile yielding occurred in the rock matrix during the excavation. The shear plastic zones in the rock matrix extended perpendicular to the 1st or 2nd joint planes. For joints, the shear yielding occurred on the 1st and 2nd joint sets and distributed as “X”-type. Besides, tensile yielding occurred on the 1st and 2nd joint planes within the regions of shear plastic zones.

Evolution of plastic zone of different failure mode
The evolution of different plastic modes in the surrounding rockmass was related to the orientations of joint sets and the evolution of stress states. It was assumed that the stress states redistributed immediately after excavation if the model was elastic. In particular, the maximum principal stress redistributed to the tangential direction around the roadway, while the minimum principal stress redistributed to the radial direction. The surrounding rockmass around the roadway was divided into several elements, as shown in Fig. 25a, b. It could be found that the orientation of each joint plane of each element didn’t change, while the direction of the maximum principal stress differed from different elements. As discussed in Sect. 3.7, the compression strength of the rock mass changed with the angle between the direction of the maximum principal stress and the direction of the joint plane (Fig. 10a). Consequently, the ideal yielding modes and yielding zones could be predicted, which are plotted in Fig. 25c. By comparing Fig. 25c with Fig. 24, it could be found that the plastic zones in Fig. 24 almost occurred in the predicted zones.

Ideal yielded zones of jointed surrounding rockmass after excavation: (a) the zone affected by the 1st joint set and (b) the zone affected by the 2nd joint set
In summary, the orientations of joint sets affect the yielding modes, which is no longer dominated by a single mode but by multiple modes. In all, the evolution of yielding zones is more complex in jointed surrounding rockmass.
6.2 Suggestions on TBM Excavation in Jointed Strata
According to the previous analysis, the disturbance of TBM excavation is significant to the jointed surrounding rockmass. In this section, we will discuss what measures can be taken to minimize the adverse effects on the jointed rock masses during the excavation.
Six excavation-support schemes were considered, as listed in Table 7. Scheme 1 is the original excavation-support scheme. In Scheme 2, the length of the non-support area was reduced to 2.4 m. In Scheme 3, the length of the non-support area was zero, representing the condition of the roof supported by cables and bolts just after excavation, which is commonly used in the roadway excavated by roadheaders. However, it cannot be realized in the roadway excavated by open-type TBM. In scheme 4, the length of each excavation was 0.8 m. In Scheme 5, the cohesions and tensile strengths of joints were strengthened to represent the measurement such as grouting in the jointed rock masses. In Scheme 6, the liner structures on the upper half of the roadway surface was set to simulate the support of shotcrete, and the length of the non-support area was still 3.2 m. The liners had Young’s modulus of 10.5 GPa, Poisson ratio of 0.25, thickness of 100 mm and cohesion of 4e6 MPa.
The volumes of plastic zones in the monitoring section is shown in Table 8. In the simulation, only the upper part of the roadway was supported, so we only counted the volume of plastic zones in the upper half of the roadway. Some results could be concluded from Table 8 as follows:
-
1.
Effect of the length of the non-support area: Comparing Scheme 2 with Scheme 1, the reduction in length of the non-support area has little effect on volume of the plastic zones, the reduction in length of the non-support area will slightly reduce the volume of joint tensile zones, joint shear zones and rock matrix shear zones. Comparing Scheme 3 with Scheme 1, the plastic zones decrease significantly if the length of the non-support area is zero. In the roadway excavated by the open-type TBM, the length of the non-support area cannot be reduced to zero. However, the length should be reduced as much as possible.
-
2.
Effect of the length of each excavation: Comparing Scheme 4 with Scheme 1, the reduction in length of each excavation has little effect on the volume of the plastic zones. However, the volume of joint tensile zones and rock matrix shear zones slightly reduce.
-
3.
Effect of the strength cohesions and tensions of joints: Comparing Scheme 5 with Scheme 1, the volume of plastic zones can be significantly reduced by enhancing the cohesions and tensile strengths of joints. Joint tensile zones, joint shear zones and rock matrix shear zones are significantly reduced. In situ, the strengths of joints can be improved by grouting. It is an effective method to reduce the plastic zones in the jointed surrounding rockmass.
-
4.
Effect of shotcrete: Comparing Scheme 6 with Scheme 1, the volume of plastic zones can be reduced by applying shotcrete support on the surface of upper half of roadway. Comparing Scheme 6 with Scheme 5, the volumes of joint tensile or shear plastic zones in Scheme 6 are larger. However, the volume of rock matrix shear zones in Scheme 6 is smaller. It can be found that Scheme 6 is also an effective method to reduce the plastic zones in the jointed surrounding rockmass.
In the research, support schemes should be adjusted when the TBM advanced in the jointed rock masses. The length of each excavation should be reduced to 0.8 m from 1.6 m, and the support should be finished before the next excavation. Besides, the length of non–support areas should be reduced to 2.0–2.4 m. After that, shotcrete should be sprayed on the surface of the roadway if the surrounding rockmass severely spalled from the roof or sidewalls. The conventional cables should be replaced by grouting cables to enhance the strengths of joints. These measures could reduce the impact of joint sets and enhance the application in the field.
6.3 Discussions on the UMJ Model
The present research aims to study how multiple joint sets affect the stability of the surrounding rockmass after excavation using a 3D UMJ model. We find that the yielding modes in jointed surrounding rockmass are complex, with shear yielding in rock matrix, shear sliding and tensile yielding on joint planes. Besides, excavation disturbed zones in jointed surrounding rockmass extended perpendicular to the joint planes, in which direction the displacement was more significant. The surrounding rockmass tended to be unstable perpendicular to the joint planes. These findings are consistent with some previous studies (Chang and Konietzky 2018; Sainsbury and Sainsbury 2017; Sun and Yang 2019; Wang and Huang 2009, 2013).
The UMJ model is a 3D model and can simulate the influence of multiple joint sets. At present, Wang and Huang (2009); Wang and Huang (2013) and Chang and Konietzky (2018) have proposed 2D UMJ models under plane stress or strain conditions. However, the stability of the surrounding rockmass before and after excavation is affected by the TBM excavation process. Additionally, the support in surrounding rockmass are different along the axis of roadway. Thus, the problem should be investigated by 3D models.
In the literature, both FLAC3D and 3DEC have been used to study the stability of roadway. It shows that 3DEC has the advantage to simulate the movement of rock blocks, but is quite time-consuming. The purpose of the present research is to discover the failure patterns of the jointed rock mass excavated by TBM. FLAC3D is more suitable for the task. The embedded joint model in FLAC3D can only represent a single joint, so we developed a 3D Ubiquitous-Multiple-Joint Model to handle the jointed stratum. The proposed UMJ model has been proved effective in capturing the failure characteristics of roadway in the jointed stratum, and may provide guidelines for other researchers.
7 Conclusions
TBMs have been used in many underground coal mines in China. A recent application of TBM in a coal mine shows that the roadway was unstable in the surrounding rockmass affected by multiple joint sets. To analyze this problem, a 3D Ubiquitous-Multiple-Joint Model was established. The conclusions are summarized as follows:
-
1.
A 3D UMJ model was established by embedding three joint planes into a rock matrix. In the model, the influences of multiple joint sets were considered and the strength parameters decreased with plastic strains. The model was validated by comparing simulation results with the analytical results from Jaeger et al. (2007) and the experimental results from Chang et al. (2019), respectively. Both results show that the UMJ model can well capture the strength characteristics of jointed rocks.
-
2.
The model was implemented by FLAC3D 6.0 and the influence of jointed rock mass on the stability of roadway was simulated by the model. The stability of surrounding rockmass was significantly affected by the orientation of joint sets. After excavation by TBM, the plastic zones were greater in the direction perpendicular to the joint planes. Besides, the yielding modes are complex in the surrounding rockmass, including joints shear, joints tensile and rock matrix shear yielding. The values of minimum or maximum principal stresses decreased in the direction perpendicular to the joint planes. The roadway squeezed severely in the direction perpendicular to the joint planes.
-
3.
The effects of TBM excavation-support schemes on the roadway stability were discussed. The reduction in length of non-support areas or length of each excavation could reduce the plastic zones in jointed surrounding rockmass. The plastic zones could also be reduced by applying shotcrete supporting. However, these schemes were not significant to enhance the surrounding rockmass after excavation. The most effective scheme is to enhance the strengths of joint planes, which could be realized by grouting the jointed surrounding rockmass. Based on these discussions, some suggestions have been proposed for the project.
Abbreviations
- UMJ model:
-
Ubiquitous-Multiple-Joint Model
- [σ]:
-
Stress tensor in the global system established in the rock matrix
- [σ]′:
-
Stress tensor in the local system established in joint plane
- [C]:
-
Rotation tensor between global system and local system
- τ j :
-
Shear stress in the joint plane
- γ j :
-
Shear strain in the joint plane
- K :
-
Bulk modulus of the rock matrix
- G :
-
Shear modulus of the rock matrix
- σ 1, σ 2, σ 3 :
-
Representing minimum, intermediate, and maximum principal stresses and the compressive stress is negative, respectively
- ϕ m :
-
Friction angle of the rock matrix
- c m :
-
Cohesion strength of rock matrix
- \(\sigma_{{\text{m}}}^{{\text{t}}}\) :
-
Tensile strength of the rock matrix
- \(\psi_{{\text{m}}}\) :
-
Dilation angle of the rock matrix
- \(\phi_{{{\text{ji}}}}\) :
-
Friction angle of the ith joint plane
- \(c_{{{\text{ji}}}}\) :
-
Cohesion of the ith joint plane
- \(\sigma_{{{\text{ji}}}}^{{\text{t}}}\) :
-
Tensile strength of the ith joint plane
- \(\psi_{{{\text{ji}}}}\) :
-
Dilation angle of the ith joint plane
- \(\kappa_{{\text{m}}}^{{\text{s}}}\) :
-
Plastic parameters for rock matrix, describing shear-soften
- \(\kappa_{{\text{m}}}^{{\text{t}}}\) :
-
Plastic parameters for rock matrix, describing tensile-soften
- \(\kappa_{{{\text{ji}}}}^{{\text{s}}}\) :
-
Plastic parameters for the ith joint plane, describing shear-soften
- \(\kappa_{{{\text{ji}}}}^{{\text{t}}}\) :
-
Plastic parameters for the ith joint plane, describing tensile-soften
References
Agharazi A (2013) Development of a 3D equivalent continuum model for deformation analysis of systematically jointed rock masses. University of Alberta, Edmonton. https://doi.org/10.7939/R3WW7799T
Cai M (2008) Influence of stress path on tunnel excavation response—numerical tool selection and modeling strategy. Tunn Undergr Space Technol 23:618–628. https://doi.org/10.1016/j.tust.2007.11.005
Chang L, Konietzky H (2018) Application of the Mohr-Coulomb yield criterion for rocks with multiple joint sets using fast Lagrangian analysis of continua 2D (FLAC2D) software. Energies. https://doi.org/10.3390/en11030614
Chang L, Konietzky H, Frühwirt T (2019) Strength anisotropy of rock with crossing joints: results of physical and numerical modeling with gypsum models. Rock Mech Rock Eng 52:2293–2317. https://doi.org/10.1007/s00603-018-1714-8
Duveau G, Shao JF, Henry JP (1998) Assessment of some failure criteria for strongly anisotropic geomaterials. Mech Cohes-Frict Mater 3:1–26. https://doi.org/10.1002/(SICI)1099-1484(199801)3:1%3c1::AID-CFM38%3e3.0.CO;2-7
Hoek E (1983) Strength of jointed rock masses. Géotechnique 33:187–223. https://doi.org/10.1680/geot.1983.33.3.187
Hoek E, Brown ET (1997) Practical estimates of rock mass strength. Int J Rock Mech Min Sci 34:1165–1186. https://doi.org/10.1016/S1365-1609(97)80069-X
Hu X, He C, Walton G, Chen Z (2020) A Combined support system associated with the segmental lining in a jointed rock mass: the case of the inclined shaft tunnel at the Bulianta coal mine. Rock Mech Rock Eng 53:2653–2669. https://doi.org/10.1007/s00603-020-02056-9
Ismael M, Konietzky H (2017) Integration of elastic stiffness anisotropy into ubiquitous joint model. Procedia Eng 191:1032–1039. https://doi.org/10.1016/j.proeng.2017.05.276
Ismael M, Konietzky H (2019) Constitutive model for inherent anisotropic rocks: ubiquitous joint model based on the Hoek-Brown failure criterion. Comput Geotech 105:99–109. https://doi.org/10.1016/j.compgeo.2018.09.016
Jaeger JC, Cook NGW, Zimmerman RW (2007) Fundamentals of rock mechanics. Blackwell Publishing Ltd, Hoboken. https://doi.org/10.1007/3-540-32345-7_3
Lee Y-K, Pietruszczak S (2008) Application of critical plane approach to the prediction of strength anisotropy in transversely isotropic rock masses. Int J Rock Mech Min Sci 45:513–523. https://doi.org/10.1016/j.ijrmms.2007.07.017
Li Q, Zhao G-F, Lian J (2019) A fundamental investigation of the tensile failure of rock using the three-dimensional lattice spring model. Rock Mech Rock Eng 52:2319–2334. https://doi.org/10.1007/s00603-018-1702-z
Liu Q, Huang X, Gong Q, Du L, Pan Y, Liu J (2016) Application and development of hard rock TBM and its prospect in China. Tunn Undergr Space Technol 57:33–46. https://doi.org/10.1016/j.tust.2016.01.034
Mishra B, Nie D (2013) Experimental investigation of the effect of change in control modes on the post-failure behavior of coal and coal measures rock. Int J Rock Mech Min Sci 60:363–369. https://doi.org/10.1016/j.ijrmms.2013.01.016
Nasseria MHB, Raob KS, Ramamurthyb T (2003) Anisotropic strength and deformational behavior of Himalayan schists. Int J Rock Mech Min Sci 40:3–23. https://doi.org/10.1016/S1365-1609(02)00103-X
Sainsbury BL, Sainsbury DP (2017) Practical use of the ubiquitous-joint constitutive model for the simulation of anisotropic rock masses. Rock Mech Rock Eng 50:1507–1528. https://doi.org/10.1007/s00603-017-1177-3
Shi X-M, Liu B-G, Tannant D, Qi Y (2017) Influence of consolidation settlement on the stability of inclined TBM tunnels in a coal mine. Tunn Undergr Space Technol 69:64–71. https://doi.org/10.1016/j.tust.2017.06.013
Singh M, Singh B (2012) Modified Mohr-Coulomb criterion for non-linear triaxial and polyaxial strength of jointed rocks. Int J Rock Mech Min Sci 51:43–52. https://doi.org/10.1016/j.ijrmms.2011.12.007
Singh M, Rao KS, Ramamurthy T (2002) Strength and deformational behaviour of a jointed rock mass. Rock Mech Rock Eng 35:45–64. https://doi.org/10.1007/s006030200008
Sun B, Yang S (2019) An improved 3D finite difference model for simulation of double shield TBM tunnelling in heavily jointed rock masses: the DXL tunnel case. Rock Mech Rock Eng 52:2481–2488. https://doi.org/10.1007/s00603-018-1730-8
Tang B et al (2018) Experiences of gripper TBM application in shaft coal mine: a case study in Zhangji coal mine. China Tunn Undergr Space Technol 81:660–668. https://doi.org/10.1016/j.tust.2018.08.055
Tian HM, Chen WZ, Yang DS, Yang JP (2014) Experimental and numerical analysis of the shear behaviour of cemented concrete-rock joints. Rock Mech Rock Eng 48:213–222. https://doi.org/10.1007/s00603-014-0560-6
Tutluoğlu L, Öge İF, Karpuz C (2014) Relationship between pre-failure and post-failure mechanical properties of rock material of different origin. Rock Mech Rock Eng 48:121–141. https://doi.org/10.1007/s00603-014-0549-1
Wang T-T, Huang T-H (2009) A constitutive model for the deformation of a rock mass containing sets of ubiquitous joints. Int J Rock Mech Min Sci 46:521–530. https://doi.org/10.1016/j.ijrmms.2008.09.011
Wang T-T, Huang T-H (2013) Anisotropic deformation of a circular tunnel excavated in a rock mass containing sets of ubiquitous joints: theory analysis and numerical modeling. Rock Mech Rock Eng 47:643–657. https://doi.org/10.1007/s00603-013-0405-8
Wang Z, Zong Z, Qiao L, Li W (2018a) Elastoplastic model for transversely isotropic rocks. Int J Geomech. https://doi.org/10.1061/(asce)gm.1943-5622.0001070
Wang Z, Zong Z, Qiao L, Li W (2018b) Transversely isotropic creep model for rocks. Int J Geomech. https://doi.org/10.1061/(asce)gm.1943-5622.0001159
Xu D-P, Feng X-T, Chen D-F, Zhang C-Q, Fan Q-X (2017) Constitutive representation and damage degree index for the layered rock mass excavation response in underground openings. Tunn Undergr Space Technol 64:133–145. https://doi.org/10.1016/j.tust.2017.01.016
Zhang K, Zhang G, Hou R, Wu Y, Zhou H (2014) Stress evolution in roadway rock bolts during mining in a fully mechanized longwall face, and an evaluation of rock bolt support design. Rock Mech Rock Eng 48:333–344. https://doi.org/10.1007/s00603-014-0546-4
Zheng YL, Zhang QB, Zhao J (2016) Challenges and opportunities of using tunnel boring machines in mining. Tunn Undergr Space Technol 57:287–299. https://doi.org/10.1016/j.tust.2016.01.023
Itasca (2017) FLAC3D6.0 Theory and Backgroud (an excerpt from FLAC3D Help).
Acknowledgements
The authors would like to express their sincere thanks and appreciation for the financial support to the National Natural Science Foundation of China (Grant Number 52074260).
Funding
This study was funded by the National Natural Science Foundation of China (Grant Number 52074260).
Author information
Authors and Affiliations
Contributions
XX: methodology, software, validation, investigation, writing—original draft, writing—review and editing. KZ: conceptualization, writing—review and editing, supervision, funding acquisition. WC, HL, BM, TL, HC: writing—review and editing.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Xue, X., Zhang, K., Chen, W. et al. A 3D Ubiquitous-Multiple-Joint Model and Its Application to the Stability Analysis of TBM Excavated Roadway in Jointed Stratum. Rock Mech Rock Eng 56, 1343–1366 (2023). https://doi.org/10.1007/s00603-022-03100-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00603-022-03100-6