
Abstract
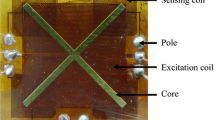
An advanced real-time workspace monitoring for parallel kinematic machines including tasks like self-calibration and exception handling demands integrated sensors measuring the angular position of the robot joints. This work introduces a single-axis MEMS fluxgate magnetometer developed for the specified application. The sensor is composed of high aspect ratio helical coils with generating and sensing functions around an electrodeposited nickel–iron core featuring ferromagnetic behavior. The core is designed in racetrack geometry causing an excellent directional sensitivity of the sensor for measuring the magnetic orientation of permanent magnets which rotate on the joint shaft. This approach allows the real-time detection of the required joint angle and the simplified analytical solution of direct kinematics.






Similar content being viewed by others


References
Boese C, Kirchhoff MR, Feldmann M, Güttler J, Büttgenbach S (2009) New generation of integrated position sensor systems for parallel robotic applications. IEEE sensors 2009 conference, ISBN 978-1-4244-5335-1, pp 1362−1365
Büttgenbach S, Güttler J, Last P, Bier C, Otremba R (2005) Development of angular joint-sensors and application to parallel robots. In: Proceedings of the second international colloquium of the Collaborative Research Center SFB 562 “Robotic systems for handling and assembly”, Shaker, Aachen, ISBN 3-8322-3866-2, pp 237−251
Franke H-J, Pavlovic N, Kirchhoff MR, Büttgenbach S (2008) Integration of sensors and actuators in joints of parallel robots. In: Proceedings of the third international colloquium of the Collaborative Research Center SFB 562 “Robotic systems for handling and assembly”, Shaker, Aachen, ISBN 978-3-8322-7129-9, pp 169–180
Göpel W, Hesse J, Zemel JN (1989) Sensors. VCH Weinheim, New York, pp 154−203
Hesselbach J, Bier C, Pietsch I, Plitea N, Büttgenbach S, Wogersien A, Güttler J (2005) Passive joint-sensor for parallel robots. Mechatronics 15:43–65
Jordan A, Kirchhoff MR, Büttgenbach S (2009) Effect analysis of magnetic annealing below Curie-temperature on the magnetic properties of electro deposited nickel–iron. In: Proceeding of 35th international conference on Micro- and Nano-Engineering, Ghent, P-MEMS-14
Kirchhoff MR, Güttler J, Waldschik A, Feldmann M, Büttgenbach S (2008) Revised fabrication process for micro-fluxgate-magnetometers: usage of electrodepositable photoresist. Microelectron Eng, 85(5−6). doi:10.1016/j.mee.2007.12.002
Kirchhoff MR, Boese C, Güttler J, Feldmann M, Büttgenbach S (2009a) Innovative high-precision position sensor systems for robotic and automotive applications. Procedia Chemistry 1:501–504. doi:10.1016/j.proche.2009.07.125
Kirchhoff MR, Bogdanski G, Büttgenbach S (2009b) Design, fabrication and characterization of a micro-fluxgate intended for parallel robot application. Proc SPIE 7362. doi:10.1117/12.822280
Primdahl F (1979) The fluxgate magnetometer. J Phys E Sci Instrum 12:241–253
Primdahl F, Hernando B, Nielsen OV, Petersen JR (1989) Demagnetising factor and noise in the fluxgate ring-core sensor. J Phys E Sci Instrum 22:1004–1008
Ripka P (1992) Review of fluxgate sensors. Sens Actuators A 33:129–141
Ripka P (2003) Advances in fluxgate sensors. Sens Actuators A 106:8–14
Acknowledgment
This work is funded by the German Research Foundation within the framework of the Collaborative Research Center SFB 562 “Robotic Systems for Handling and Assembly”. The authors thank Measurement Specialties Inc., Dortmund, Germany for the friendly cooperation.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kirchhoff, M.R., Büttgenbach, S. MEMS fluxgate magnetometer for parallel robot application. Microsyst Technol 16, 787–790 (2010). https://doi.org/10.1007/s00542-009-0985-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-009-0985-0