
Abstract
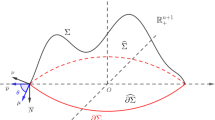
We study min–max theory for the area functional among hypersurfaces constrained in a smooth manifold with boundary. A Schoen–Simon-type regularity result is proved for integral varifolds which satisfy a variational inequality and restricts to a stable minimal hypersurface in the interior. Based on this, we show that for any admissible family of sweepouts \(\Pi \) in a compact manifold with boundary, there always exists a closed \(C^{1,1}\) hypersurface with codimension \(\ge 7\) singular set in the interior and having mean curvature pointing outward along boundary realizing the width \(\mathbf {L}(\Pi )\).
Similar content being viewed by others

Data Available Statement
This manuscript contains no associated data.
References
Allard, W.K.: On the first variation of a varifold. Ann. Math. 95(3), 417–491 (1972)
Almgren, F.J.: The homotopy groups of the integral cycle groups. Topology 1(4), 257–299 (1962)
Frederick, J.A., Jr.: The theory of varifolds, 1965. Mimeographed notes, Princeton
Almgren, F.J.: Existence and regularity almost everywhere of solutions to elliptic variational problems with constraints. Bull. Am. Math. Soc. 81(1), 151–154 (1975)
Brézis, H., Kinderlehrer, D., Lewy, H.: The smoothness of solutions to nonlinear variational inequalities. Indiana Univ. Math. J. 23(9), 831–844 (1974)
Elisabetta, B., Massari, U.: Regularity of minimal boundaries with obstacles. Rendiconti del Seminario Matematico della Università di Padova, 66:129–135 (1982)
Bombieri, E.: Regularity theory for almost minimal currents. Arch. Ration. Mech. Anal. 78(2), 99–130 (1982)
Jacob, B., Lu, W.: A mountain-pass theorem for asymptotically conical self-expanders. Peking Math. J., page in press. Available at: arXiv:2003.13857 (2021)
Caffareli, L.A., Kinderlehrer, D.: Potential methods in variational inequalities. J. d’Anal. Math. 37(1), 285–295 (1980)
De Lellis, C., Ramic, J.: Min–max theory for minimal hypersurfaces with boundary. Ann. de l’Inst. Fourier 68, 1909–1986 (2018)
Federer, H.: Geometric measure theory. Grundlehren der Math, vol. 153. Wiss. Springer, New York (1969)
Federer, H., Fleming, W.H.: Normal and integral currents. Ann. Math. 2(72), 458–520 (1960)
Qiang, G., Martin, M.C.L., Xin, Z.: Curvature estimates for stable free boundary minimal hypersurfaces. J. für die Reine und Angew. Math. 2020(759):245–264 (2020)
Gilbarg, D., Hörmander, L.: Intermediate schauder estimates. Arch. Ration. Mech. Anal. 74(4), 297–318 (1980)
Giusti, E.: Minimal surfaces with obstacles. In: Geometric Measure Theory and Minimal Surfaces, pp. 119–153. Springer (2010)
Mariano, G., Pepe, L.: Esistenza e regolarità per il problema dell’area minima con ostacoli in \(n\) variabili. Annali della Scuola Normale Superiore di Pisa - Classe di Scienze, Ser. 3, 25(3):481–507 (1971)
David, G., Neil, S.T.: Elliptic Partial Differential Equations of Second Order. Springer, New York (2001). reprint of the 1998 edition
Ilmanen, T.: A strong maximum principle for singular minimal hypersurfaces. Calc. Var. Partial Differ. Equ. 4(5), 443–467 (1996)
Irie, K., Marques, F.C., Neves, A.: Density of minimal hypersurfaces for generic metrics. Ann. Math. 2(187), 963–972 (2018)
Yangyang, L.: Existence of infinitely many minimal hypersurfaces in higher-dimensional closed manifolds with generic metrics. J. Differ. Geom., page in press. Available at: arXiv:1901.08440
Fang-Hua, L.: Regularity for a Class of Parametric Obstacle Problems (Integrand, Integral Current, Prescribed Mean Curvature, Minimal Surface System). PhD thesis (1985)
Lewy, H., Stampacchia, G.: On existence and smoothness of solutions of some non-coercive variational inequalities. Arch. Rational Mech. Anal. 41, 241–253 (1971)
Martin, M.-C.L., Xin, Z.: Min–max theory for free boundary minimal hypersurfaces, i: regularity theory. J. Differ. Geom. 118(3), 487–553 (2021)
Miranda, M.: Frontiere minimali con ostacoli. Ann. Univ. Ferrara 16, 29–37 (1971)
Fernando, C.M., André, N.: Min–max theory and the Willmore conjecture. Ann. Math. (2) 179(2), 683–782 (2014)
Marques, F.C., Neves, A.: Existence of infinitely many minimal hypersurfaces in positive Ricci curvature. Invent. Math. 209(2), 577–616 (2017)
Fernando, C.M., André, N., Antoine, S.: Equidistribution of minimal hypersurfaces for generic metrics. Invent. Math. 216(2), 421–443 (2019)
Montezuma, R.: A mountain pass theorem for minimal hypersurfaces with fixed boundary. Calc. Var. Partial Differ. Equ. 59(6), 1–30 (2020)
Pitts, J.T.: Existence and regularity of minimal surfaces on Riemannian manifolds. Math, vol. 27. Notes. Princeton Univ. Press, Princeton, N.J. (1981)
Leon, S.: Lectures on Geometric Measure Theory, volume 3 of Proc. Centre for Mathematical Analysis, Australian National University. Australian National University, Centre for Mathematical Analysis, Canberra (1983)
Antoine, S.: Existence of infinitely many minimal hypersurfaces in closed manifolds. arXiv:1806.08816 (2018)
Schoen, R., Simon, L.: Regularity of stable minimal hypersurfaces. Commun. Pure Appl. Math. 34(6), 741–797 (1981)
Tamanini, I.: Boundaries of caccioppoli sets with hölder-continuois normal vector. J. für die Reine und Angew. Math. 334, 27–39 (1982)
Zhihan, W.: Deformations of singular minimal hypersurfaces i, isolated singularities (2020)
White, B.: A strong minimax property of nondegenerate minimal submanifolds. J. für die Reine und Angew. Math. 457, 203–218 (1994)
White, B.: The maximum principle for minimal varieties of arbitrary codimension. Commun. Anal. Geom. 18(3), 421–432 (2010)
Zhou, X.: On the multiplicity one conjecture in min-max theory. Ann. Math. 192(3), 767–820 (2020)
Zhou, X., Zhu, J.J.: Existence of hypersurfaces with prescribed mean curvature i-generic min-max. Camb. J. Math. 8(2), 311–362 (2020)
Acknowledgements
I am grateful to my advisor Fernando Codá Marques for his constant support and guidance. I’m thankful to Chao Li and Xin Zhou for suggesting this problem and inspiring discussions and to Fanghua Lin for helpful explanations to his thesis [21] on obstacle problem. I would also thank Yangyang Li, Zhenhua Liu and Lu Wang for their interest in this work, and thank anonymous reviewer for helpful comments on earlier drafts of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by F.-H. Lin.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
A Improved regularity for obstacle problems
A Improved regularity for obstacle problems
The goal of this section is to prove Theorems 2.11 and 2.12. First recall that under local coordinate chart \((\mathcal {U}, x^i)\) of \(\partial M\), if \(u\in C^1(\mathcal {U}, (-r_M/2, r_M/2))\), then \(\mathscr {H}^n(graph_{\partial M}(u))= \int _{\mathcal {U}} F(x, u, du)\), where \(0< F(x, z, p)\in C^{\infty }(\mathcal {U}\times (-r_M, r_M)\times \mathbb {R}^n)\) satisfies
If \(u\ge 0\) and \(graph_{\partial M}(u)\) is constrained stationary in M, then
for every \(\phi \in C_c^1(\mathcal {U})\) such that \(0<t<<1\), \(u+t\phi \ge 0\).
We shall deal with more general quasi-linear 2nd order elliptic operator of divergence form. For simplicity, write \(B_r(x):= \mathbb {B}^n_r(x)\subset \mathbb {R}^n\), \(B_r := B_r(0)\) and \(\Omega _r:= B_r\times [-1, 1]\times B_1\). Let \(\lambda , \Lambda >0\), \(\alpha \in (0, 1)\) be constant, \(A = A(x, z, p)\in C^3(B_2\times \mathbb {R}\times \mathbb {R}^n, \mathbb {R}^n)\), \(B=B(x, z, p)\in C^2(B_2\times \mathbb {R}\times \mathbb {R}^n)\) satisfying
Let \(\mathscr {M}u := -div(A(x, u, \nabla u)) + B(x, u, \nabla u)\). Consider the variational inequality for a function \(u\in C^1(B_2, \mathbb {R}_+)\),
Clearly, (A.3) implies (A.5), where \(A = \partial _p F\) and \(B = \partial _z F\).
Theorem A.1
\(\exists \delta _0 = \delta _0(\lambda , \Lambda , n, \alpha )\in (0, 1)\) such that if A, B satisfies (A.4), \(0\le u\in C^{1,\alpha }_{loc}(B_2{\setminus } \{0\})\cap C^1(B_2)\) satisfies (A.5) and that \(\Vert u\Vert _{C^1(B_2)}\le \delta _0\), then \(u\in C^{1,1}_{loc}(B_2)\) and
In view of the proof of Lemma 3.4, Theorem 2.11 follows from Theorem A.1.
The major effort is made to prove the following lemma,
Lemma A.2
There exists \(\delta _0 = \delta _0(\lambda , \Lambda , n, \alpha )\in (0, 1)\), \(\eta _0 = \eta _0(\lambda , \Lambda , n, \alpha )\in (0, \delta _0)\) s.t. if u be in Theorem A.1 and further satisfying
and \(\eta <\eta _0\) such that the elliptic coefficients satisfies
Then \(\Vert u\Vert _{C^{1,1}(B_1)} \le C(\lambda , \Lambda , n, \alpha )(\Vert u\Vert _{C^{1,\alpha }(B_2)} + \eta ) \).
Proof of Theorem A.1
Observe that if \(x_0\in B_1\), \(r\in (0, 1)\), let \(\tilde{u}(y):= u(x_0 + ry)/r\), then
where
Hence, by Lemma A.2, for u satisfying the assumptions in Theorem A.1, \(u\in C^{1,1}_{loc}(B_2{\setminus } \{0\})\). Thus, for a.e. \(x\in B_2{\setminus } \{0\}\), \(\mathscr {M}u (x) = B(x, 0, 0)\). Together with (A.5) and that \(\Vert u\Vert _{C^1(B_2)} \le 1\), by a cutting off argument, \(\mathscr {M}u (x) = B(x, 0, 0)\cdot \chi _{\{u=0\}}\) in the weak sense on \(B_2\). Hence by standard elliptic estimate [17, Theorem 13.1], \(\exists \beta =\beta (\lambda , \Lambda , n)\in (0 ,1)\) such that \(\Vert u\Vert _{C^{1, \beta }(B_{3/2})}\le C(\lambda , \Lambda , n)\). Then repeat the rescaling argument above, by Lemma A.2, Theorem A.1 is proved. \(\square \)
Now we start to prove Lemma A.2.
Lemma A.3
\(\exists \eta _1 = \eta _1(\lambda , \Lambda , n, \alpha )\in (0,1)\) such that if \(\eta \le \eta _1\) and A, B satisfies (A.4) and (A.7), \(\Vert \phi \Vert _{C^{1, \alpha }(\partial B_1)}\le \eta _1\). Then the equation
has a unique solution \(u\in C^{1,\alpha }(Clos(B_1))\) satisfying
The uniqueness follows directly from comparison principle, see [17, Chapter 10]; We assert that the existence result does not follow directly from the classical Schauder estimate, since the latter requires boundary value to be \(C^{2,\alpha }\). Instead, one need to work in the space \(H_a^{(b)}\) introduced [14], where \(a = 2+\alpha \), \(b = 1+\alpha \). By [14, Theorem 5.1] and a fixed point argument, there exists \(u\in H^{(b)}_a(B_1)\) satisfying (A.8) with uniformly bounded \(H^{(b)}_a\)-norm; and (A.9) follows from [14, Lemma 2.1].
Proof of Lemma A.2
Let \(\delta _0, \eta _0\in (0, \eta _1)\) to be determined; u be in Lemma A.2.
Step 1 \(\forall x_0\in B_{3/2}\cap \{u=0\}\), \(\forall r\in (0, 1/2)\), let \(v=v_{x_0, r}\in C^{1,\alpha }(B_r(x_0))\) be the solution of
given by Lemma A.3. Also, let \(\bar{v}\) be the solution of
Also note that \(\Vert u\Vert _{C^1(B_r)}, \Vert v\Vert _{C^1(B_r)}, \Vert \bar{v}\Vert _{C^1(B_r)}\le C(\lambda , \Lambda , n, \alpha )(\eta _0 + \delta _0)\) and \(\mathscr {M}u \ge 0\) in the weak sense. Hence, by taking \(\eta _0, \delta _0<< 1\) and using the maximum principle [17, Theorem 10.10],
for every \(x\in B_r(x_0)\); And \(\bar{v}\le v\) on \(B_r(x_0)\). Applying the classical \(C^0\) estimate on \(\tilde{v}(y):=\bar{v}(x_0+ry)/r\), one get
Since \(v-\bar{v}\ge 0\) on \(B_r(x_0)\), \(\mathscr {M}v = \mathscr {M}\bar{v} = 0\) and \(v(x_0)\le u(x_0)=0\), by (A.4) and Harnack inequality,
Combining (A.10), (A.11) and (A.12) one derive
Step 2 \(\forall x_0\in \{u=0\}\), \(\nabla u(x_0) = 0\); \(\forall x_0\in \{u>0\}\cap B_{3/2}\), if \(l:=dist(x_0, \{u=0\})<1/8\), let \(y_0\in \{u=0\}\) such that \(|x_0 - y_0| = l\). Then by (A.13),

Hence by interior gradient estimate,
Now that, \(\forall x_1, x_2\in B_1\), \(\rho :=|x_1-x_2|<1/20\), \(l_i:=dist(x_i, \{u=0\})\), \(l_1\le l_2\).
- (1):
-
If \(l_2 \ge 1/8\), then directly by gradient estimate
$$\begin{aligned} |\nabla u(x_1)- \nabla u(x_2)|\le \rho \sup _{B_{\rho }(x_2)}\Vert \nabla ^2 u\Vert \le C(\lambda , \Lambda , n, \alpha )|x_1-x_2|; \end{aligned}$$ - (2):
-
If \(2\rho \le l_2< 1/8\), then by (A.14),
$$\begin{aligned} |\nabla u(x_1)- \nabla u(x_2)|\le \rho \sup _{B_{l_2/2}(x_2)}\Vert \nabla ^2 u\Vert \le C(\lambda , \Lambda , n, \alpha )|x_1-x_2|; \end{aligned}$$ - (3):
-
If \(l_2\le 2\rho \), then also by (A.14),
$$\begin{aligned}&|\nabla u(x_1)-\nabla u(x_2)| \le |\nabla u(x_1)|+|\nabla u(x_2)|\\&\quad \le C(\lambda , \Lambda , n, \alpha )(l_1+l_2)\le C(\lambda , \Lambda , n, \alpha )|x_1-x_2|. \end{aligned}$$
This proves the \(C^{1,1}\) bound of u. \(\square \)
Proof of Theorem 2.12
The regularity results in literature focus on minimizing boundaries; For general closed integral current, the strategy is to first decompose them into sum of boundary of Caccioppoli sets. One subtlety is that a priori the graphs may have incompatible orientations. We rule out this by choosing \(U_y\) small enough.
Recall that \(M^{n+1}\subset \mathbb {R}^L\) is a compact submanifold with boundary, extended to a closed manifold \(\tilde{M}^{n+1}\subset \mathbb {R}^L\); \(\tilde{U}\subset \tilde{M}\) is relatively open and \(U:=\tilde{U}\cap M\). Suppose \(U\cap \partial M \ne \emptyset \). \(T\in \mathcal {Z}_n(U)\) minimize mass among \(\{S\in \mathcal {Z}_n(U): spt(T-S)\subset \subset U\}\). Call such T constrained minimizing in U.
WLOG \(U, \tilde{U}, V:=\tilde{U}{\setminus } U\) are contractible and \(\mathbf {M}_U(T)>0\). By decomposition theorem [30, Chap 6,27.6], there’s a decreasing sequence of \(\mathscr {H}^{n+1}\)-measurable subsets \(\{U_j\subset \tilde{U}\}_{j\in \mathbb {Z}}\) such that
In particular, \(\mathbf {M}_W(T) = \sum _{j\in \mathbb {Z}}\mathbf {M}_W(\partial [U_j])\) for all \(W\subset \subset \tilde{U}\), \(spt(\partial [U_j])\subset U\) and \(T_j := \partial [U_j]\) are also constrained minimizers in U (along \(\partial M\)). Thus for each j, either \(spt[U_j]\) or \(spt([\tilde{U}]- [U_j])\) contains V. WLOG, \(spt(\partial [U_0])\cap \partial M \ne \emptyset \) and \(spt[U_0]\supset V\). Hence \(\forall j\le 0\), \(spt[U_j]\supset V\); and \(\forall j>0\), either \(spt[U_j]\supset V\) or \(spt[U_j]\subset spt[U_0]{\setminus } V\).
Claim: \(\forall \mathcal {K}\subset U\cap \partial M\) compact, \(\exists \ r_1 = r_1(M, U, \mathcal {K})>0\) such that if \(T_0 = \partial [U_0]\), \(T_1 = \partial [U_1]\) are constrained minimizers in U and \(U_0\supset V\), \(U_1\subset U_0{\setminus } V\); \(y\in \mathcal {K}\cap spt(T_0)\). Then \(U_1\cap B_{r_1}(y)=\emptyset \).
Clearly, with this claim, for each \(j\in \mathbb {Z}\), \(T_j\llcorner B_{r_1}(y) = \partial [U_j']\llcorner B_{r_1}(y)\) is constrained minimizing in \(B_{r_1}(y)\), where \(U_j' := U_j\cap B_{r_1}(y)\) is either empty or containing V. Hence, by [24] and [33], \(T_j\llcorner B_{r_1}(y)\) is \(C^{1,\alpha }\) for some \(\alpha \in (0, 1)\). Then by Theorem 2.11, T is \(C^{1, 1}\) multiple graphs restricting to a smaller subset \(U_{y}\). This proves (1) of Theorem 2.12; and (2) follows from unique continuation of minimal hypersurfaces.
Proof of the claim: By [24], for every \(\delta \in (0,1), \exists \ r_2 = r_2(M, U, \mathcal {K}, \delta )>0\) and \(u_0\in C^1(U\cap \partial M)\) such that \(\forall y\in \mathcal {K}\cap spt(T_0)\),
Assuming the claim fails, then \(\exists \ y_j\in \mathcal {K}\cap spt(T_0^{(j)})\), \(T_i^{(j)} = \partial [U_i^{(j)}]\) being constrained minimizing boundary in U, where \(i=0,1\), \(j\ge 1\), \(U_0^{(j)}\supset V\), \(U_1^{(j)}\subset U_0^{(j)}{\setminus } V\) and \(U_1^{(j)}\cap B_{1/j}(y_j)\ne \emptyset \). Then \(spt(T_1^{(j)})\cap B_{1/j}(y_j)\ne \emptyset \).
Let \(j\rightarrow \infty \), \(y_j\rightarrow y_{\infty }\in \mathcal {K}\), and consider \((\eta _{y_j, 1/j})_{\sharp }T_1^{(j)}\rightarrow T_1^{(\infty )}\) being constrained minimizing in \(T_{y_{\infty }}^+M \cong \mathbb {R}^{n+1}_+\). The convergent is both in current and in varifold sense. Therefore, by (A.15) and that \(y_j\in \mathcal {K}\cap spt(T_0^{(j)}) \subset \partial M\), \(U_1^{(j)}\subset U_0^{(j)}{\setminus } V\), we have \(T_1^{(\infty )}=\partial [U_1^{(\infty )}]\) for some \(spt(U_1^{(\infty )})\subset T_{y_\infty }\partial M\), which is \(n+1\) negligible. In particular, \(T_1^{(\infty )} = 0\); On the other hand, by \(spt(T_1^{(j)})\cap B_{1/j}(y_j)\ne \emptyset \), Lemma 2.3 and Corollary 2.4, \(T_1^{(\infty )}\ne 0\) and we get a contradiction. \(\square \)
