
Abstract
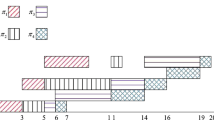
This paper proposes a reentrant hybrid flow shop scheduling problem where inspection and repair operations are carried out as soon as a layer has completed fabrication. Firstly, a scheduling problem domain of reentrant hybrid flow shop is described, and then, a mathematical programming model is constructed with an objective of minimizing total weighted completion time. Then, a hybrid differential evolution (DE) algorithm with estimation of distribution algorithm using an ensemble model (eEDA), named DE–eEDA, is proposed to solve the problem. DE–eEDA incorporates the global statistical information collected from an ensemble probability model into DE. Finally, simulation experiments of different problem scales are carried out to analyze the proposed algorithm. Results indicate that the proposed algorithm can obtain satisfactory solutions within a short time.






Similar content being viewed by others

References
Hekmatfar M, Ghomi SMTF, Karimi B (2011) Two stage reentrant hybrid flow shop with setup times and the criterion of minimizing makespan. Appl Soft Comput 11(8):4530–4539
Choi SW, Kim YD, Lee GC (2005) Minimizing total tardiness of orders with reentrant lots in a hybrid flowshop. Int J Prod Res 43(11):2149–2167
Jiang S, Tang L (2008) Lagrangian relaxation algorithms for re-entrant hybrid flowshop scheduling. In: 2008 IEEE international conference on information management, innovation management and industrial engineering, vol 1. IEEE, Taipei, pp 78–81
Cho HM, Bae SJ, Kim J et al (2011) Bi-objective scheduling for reentrant hybrid flow shop using Pareto genetic algorithm. Comput Ind Eng 61(3):529–541
Choi HS, Kim JS, Lee DH (2011) Real-time scheduling for reentrant hybrid flow shops: a decision tree based mechanism and its application to a TFT-LCD line. Expert Syst Appl 38(4):3514–3521
Dugardin F, Amodeo L, Yalaoui F (2009) Multiobjective scheduling of a reentrant hybrid flowshop. In: 2009 IEEE international conference on computers & industrial engineering. IEEE, Troyes, pp 193–195
Dugardin F, Yalaoui F, Amodeo L (2010) New multi-objective method to solve reentrant hybrid flow shop scheduling problem. Eur J Oper Res 203(1):22–31
Yalaoui N, Amodeo L, Yalaoui F, et al (2010) Particle swarm optimization under fuzzy logic controller for solving a hybrid Reentrant Flow Shop problem. In: 2010 IEEE international symposium on parallel and distributed processing, workshops and Phd forum. IEEE, Atlanta, pp 1–6
Rau H, Cho KH (2009) Genetic algorithm modeling for the inspection allocation in reentrant production systems. Expert Syst Appl 36(8):11287–11295
Storn R, Price K (1997) Differential evolution-a simple and efficient heuristic for global optimization over continuous spaces. J Glob Optim 11(4):341–359
Ilonen J, Kamarainen JK, Lampinen J (2003) Differential evolution training algorithm for feed-forward neural networks. Neural Process Lett 17(1):93–105
Liu J, Lampinen J (2005) A fuzzy adaptive differential evolution algorithm. Soft Comput 9(6):448–462
Wang H, Wu Z, Rahnamayan S (2011) Enhanced opposition-based differential evolution for solving high-dimensional continuous optimization problems. Soft Comput 15(11):2127–2140
Pan QK, Suganthan PN, Wang L et al (2011) A differential evolution algorithm with self-adapting strategy and control parameters. Comput Oper Res 38(1):394–408
Arslan M, Çunkaş M, Sağ T (2012) Determination of induction motor parameters with differential evolution algorithm. Neural Comput Appl 21(8):1995–2004
Wang GG, Gandomi AH, Alavi AH et al (2014) Hybrid krill herd algorithm with differential evolution for global numerical optimization. Neural Comput Appl 25(2):297–308
Wang L, Zou F, Hei X et al (2014) A hybridization of teaching–learning-based optimization and differential evolution for chaotic time series prediction. Neural Comput Appl 25(6):1407–1422
Chiou JP, Chang CF, Su CT (2004) Ant direction hybrid differential evolution for solving large capacitor placement problems. IEEE Trans Power Syst 19(4):1794–1800
Onwubolu G, Davendra D (2006) Scheduling flow shops using differential evolution algorithm. Eur J Oper Res 171(2):674–692
Qian B, Wang L, Huang DX et al (2008) Scheduling multi-objective job shops using a memetic algorithm based on differential evolution. Int J Adv Manuf Technol 35(9–10):1014–1027
Damak N, Jarboui B, Siarry P et al (2009) Differential evolution for solving multi-mode resource-constrained project scheduling problems. Comput Oper Res 36(9):2653–2659
Pan QK, Wang L, Gao L et al (2011) An effective hybrid discrete differential evolution algorithm for the flow shop scheduling with intermediate buffers. Inf Sci 181(3):668–685
Omran MG, Salman A, Engelbrecht AP (2005) Self-adaptive differential evolution. In: International conference on computational and information science. Springer, Berlin, pp 192–199
Qin AK, Huang VL, Suganthan PN (2009) Differential evolution algorithm with strategy adaptation for global numerical optimization. IEEE Trans Evol Comput 13(2):398–417
Wang L, Pan QK, Suganthan PN, Wang WH, Wang YM (2010) A novel hybrid discrete differential evolution algorithm for blocking flow shop scheduling problems. Comput Oper Res 37(3):509–520
Yildiz AR (2013) Hybrid Taguchi-differential evolution algorithm for optimization of multi-pass turning operations. Appl Soft Comput 13(3):1433–1439
Zhang Y, Li X (2011) Estimation of distribution algorithm for permutation flow shops with total flowtime minimization. Comput Ind Eng 60(4):706–718
Wang L, Wang S, Xu Y et al (2012) A bi-population based estimation of distribution algorithm for the flexible job-shop scheduling problem. Comput Ind Eng 62(4):917–926
Wang S, Wang L, Liu M et al (2013) An effective estimation of distribution algorithm for solving the distributed permutation flow-shop scheduling problem. Int J Prod Econ 145(1):387–396
Donate JP, Li X, Sánchez GG et al (2013) Time series forecasting by evolving artificial neural networks with genetic algorithms, differential evolution and estimation of distribution algorithm. Neural Comput Appl 22(1):11–20
Cheng S, Lu X, Zhou X (2014) Globally optimal selection of web composite services based on univariate marginal distribution algorithm. Neural Comput Appl 24(1):27–36
Lozano JA, Larranaga P, Inza I (2006) Towards a new evolutionary computation: advances on estimation of distribution algorithms. Springer, Berlin
Jarboui B, Eddaly M, Siarry P (2009) An estimation of distribution algorithm for minimizing the total flowtime in permutation flowshop scheduling problems. Comput Oper Res 36(9):2638–2646
Pan QK, Ruiz R (2012) An estimation of distribution algorithm for lot-streaming flow shop problems with setup times. Omega-Int J Manage S 40(2):166–180
Chen SH, Chen MC (2013) Addressing the advantages of using ensemble probabilistic models in estimation of distribution algorithms for scheduling problems. Int J Prod Econ 141(1):24–33
Acknowledgements
This study was supported by the National Natural Science Foundation of China under Grant Nos. 61273035 and 71471135.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
This section proposes how to construct the lower bound of our problem. The lower bound is got by the Lagrangian relaxation algorithm. The details are as follows.
1.1 Relaxing machine capacity constraints
The machine capacity constraint (5) can be relaxed by using nonnegative Lagrangian multipliers \(\lambda_{k,u}\)(\(k = 1, \ldots ,K,\) \(u = 1, \ldots ,\left| M \right|\)). Then, the relaxed problem RP is as follows:
s.t. (2), (3), (4) and (23).
The objective function of problem RP can be written as:
Then, the problem RP can be decomposed into independent job-level subproblems. The job-level subproblem denoted as SP i can be presented as follows:
s.t. (2), (3), (4) and (23).
1.2 Solving job-level subproblems
The subproblems are solved by dynamic programming with precedence constraints embedded in the dynamic programming recursion.
\(h_{i,l,j} (u,t)\) represents the cost for completing the operation of job i at layer l at station j in time t on machine u. It is defined as follows:
\(T_{i,l,j}\) represents the earliest completion time of the operation of job i at layer l at station j. Let \(f_{i,l,j} (u,t)\) be the optimal criterion value of state \((u,t)\) for the operation of job i at layer l at station j. Then, the dynamic programming recursion for solving each job-level subproblem is expressed as:
The optimal machine selection and completion time for the operation of job i at layer L i at station J i can be obtained recursively by \((u_{{_{{i,L_{i} ,J_{i} }} }}^{ * } ,t_{{_{{i,L_{i} ,J_{i} }} }}^{ * } ) = \arg \mathop {\hbox{min} }\limits_{{u \in M_{{i,L_{i} ,J_{i} }} ,T_{{i,L_{i} ,J_{i} }} \le t \le K}} f_{{i,L_{i} ,J_{i} }} (u,t)\)
The optimal machine selection and completion time for the operation of job i at layer \(L_{i} - 1\), \(L_{i} - 2\),…, 1 at station \(J_{i} - 1\), \(J_{i} - 2, \ldots ,1\) can be derived recursively by:
1.3 Construction of a feasible solution
The priority list of jobs are created by sorting the job number according to the ascending order of the completion time of the operation for the job at the first station of the first layer from the solution of the relaxed problem. Assign the jobs to the first machine that becomes available successively. Then, for the following stations, update the ready times in each station to be the completion times of the previous station. Arrange the jobs in increasing order of ready times and assign the jobs to the first available machine successively.
1.4 Subgradient algorithm
The Lagrange multipliers are updated by:
where UB and LB represents the upper bound and the lower bound, respectively.
1.5 Lagrangian relaxation algorithm
-
Step 1: Set the number of iterations n = 0, set the Lagrange multipliers \(\lambda_{k,u} = 0\).
-
Step 2: Each job-level subproblem (SP i ) is solved by the dynamic programming recursion. The lower bound LB is calculated.
-
Step 3: Construct a feasible solution. The upper bound UB is calculated.
-
Step 4: If n < 300, go to Step 5. Otherwise, stop.
-
Step 5: Update the Lagrange multipliers and n = n + 1 and then return to Step 2.
1.6 The value of lower bound
See Table 4.
Rights and permissions
About this article

Cite this article
Zhou, Bh., Hu, Lm. & Zhong, Zy. A hybrid differential evolution algorithm with estimation of distribution algorithm for reentrant hybrid flow shop scheduling problem. Neural Comput & Applic 30, 193–209 (2018). https://doi.org/10.1007/s00521-016-2692-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-016-2692-y