
Abstract
In this paper, global exponential synchronization of a class of discrete delayed complex networks with switching topology has been investigated by using Lyapunov-Ruzimiki method. The impulsive scheme is designed to work at the time instant of switching occurrence. A time-varying delay-dependent criterion for impulsive synchronization is given to ensure the delayed discrete complex networks switching topology tending to a synchronous state. Furthermore, a numerical simulation is given to illustrate the effectiveness of main results
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
It has long been understood that many physical, social, biological, and technological networks are modeled by a graph with non-trivial topological features. In this model, every node is an individual element of the whole system with certain pattern of connections, in which connections between each pair of nodes are neither entirely regular nor entirely random [1–3]. These features do not occur in the mathematical models of networks that have been studied in the past, such as lattices or random graphs, but they do truly exist in nature. At present, derivatives of network science have been successfully applied to the analysis of metabolic and genetic regulatory networks, the design of robust and scalable communication networks both wired and wireless, the development of vaccination strategies for the control of disease, and a broad range of other practical issues.
Secure communication [4, 5], parallel image processing [6], and chemical reaction implemented by coupled chaotic systems have been an active research field during the last two decades. Synchronization issues are fundamentally important for any dynamical networks, and there is no exception for complex networks. As a consequence, theory and methods for synchronization of different families of complex networks have been extensively studied by many researchers (such as [7–15], and references therein). Network synchronization has been discussed in terms of spectral and statistical properties by authors [16]. The results on complete synchronization, phase synchronization, space lag synchronization, and cluster reflect the ideas of [17–19]. The improvement on different regimes of synchronization of discrete complex networks is abstracted from papers authored by [9, 20]. Some general cases of synchronization of complex networks with switching topology can be found in the literatures of [15, 21]. From another angle, several approaches to synchronize a complex network have been proposed. Adaptive synchronization, impulsive synchronization scheme, and pining control synchronization have been considered by authors in [10–12, 22, 23–27]. In addition, systems with delays and multiplicative noises have been studied by considering H-infinity method in [28] and [29].
However, all previous studies have limitations on synchronizing a state delayed discrete complex network. As known, connections between each pair of nodes in a complex network always change. The mutable topology can pose a significant threat on the global dynamical property of the whole networks. Indeed, the fact has been ignored by most of pioneering work. Additionally, the large time-varying delays may exist in switching topology which means data communication may occur in different sub-networks. It is much more complicated than previous studies. If the mutable topology and a large time-varying delay occur simultaneously in the discrete complex networks, it would be difficult to employ previous synchronization control schemes. Therefore, it is necessary to investigate new synchronization method.
Impulsive control has been successfully used to stabilize and synchronize dynamical systems, for examples, [30–37]. And impulsive control technique could be an efficient method when a discrete change behavior is needed. The adjustment interest rate could agree with that. In this paper, we proposed an impulsive synchronization scheme for a state delayed discrete complex network with switching topology. For this control scheme, we consider that the impulsive control signal is designed to be input into all of nodes. Meanwhile, every time instant of impulsive effects occur precisely at the time instant of switching happening. In other words, when the complex networks switch its state at every instant of time, there is no delay between the controller functioning.
The paper is organized as follows. Section 2 presents some mathematical preliminaries needed in this work, and a generalized mathematical model for delayed discrete complex networks with switching topology. The main theorem for global synchronization of this type of discrete complex networks is then given in Sect. 3. In Sect. 4, a small-world network with 3 sub-networks involving 30 nodes is constructed to illustrate the effectiveness of our result. Section 5 concludes the paper.
2 Preliminary
First, we need to introduce some notations and definitions for the sake of exploring our main results. Let \(\|\bullet\|\) denote the Euclidean norm; \({\mathbb{R}^n}\) denotes the n dimensional Euclidean space, the set of natural numbers \({\mathbb{N}=\{0,1,2,\ldots\}}\), and, for certain positive integer τ, we let \({\mathbb{Z}_{-\tau}=\{-\tau,-\tau+1,\ldots,0\}}\). The family of N linearly coupled discrete complex networks, consisting of time delay with respect to its system state and the switched topology, can be described by
where \({x_i(k)=(x_{i,1},x_{i,2},\ldots ,x_{i,n})\; \in \mathbb{R}^n}\) represents the state vector of the i-th node at every instant of time k and n denotes the number of nodes affiliated to each sub-network. \({{\bf A} \in \mathbb{R}^{n\times n},\;{\bf B} \in \mathbb{R}^{n\times n}}\) and \({{\bf D} \in \mathbb{R}^{n\times n}}\) are known real matrices. \({\bf f(x_i(k))}=({\bf f_1(x_{i,1}(k))},{\bf f_2(x_{i,2}(k))},\;\ldots,{\bf f_n(x_{i,n}(k))})^{T}\) and \({{\bf f}(\bullet):\mathbb{R}^n \longrightarrow \mathbb{R}^n}\) is a smooth nonlinear vector-valued functions. \({\bf I(k)}=(I_1(k),I_2(k),\;\ldots,I_n(k))^{T}\) is a n-dimensional vector from external input. S is a finite index set of r elements: \({\bf S}=\{s_1,s_2,\ldots ,s_r\}\). Let the switching function be denoted by \({\sigma(k):\mathbb{N} \longrightarrow {\bf S}}\), which is the switching signal from sudden changing of system dynamic without jumps in the state x at any switching instant. Specifically, we consider that it is a piecewise constant function and continuous from the right, indicating certain active sub-system regime, at every instant of time k the index \(\sigma(k)=s_k \in {\bf S}\); meanwhile, let the switching instants of σ be denoted by \(k_{m,x}\;(m=1,2,\ldots)\) and let k 0,x : = 0. \({C_{s_k}=(c_{ij,s_k})\in \mathbb{Z}^{N\times N}}\) represents the outer coupling configuration symmetric matrix defined as follows: For each active sub-system regime s k , if there is a connection from node j to node i (j ≠ i), then \(c_{ij,s_k}=c_{ji,s_k}>0\); otherwise \(c_{ij,s_k}=c_{ji,s_k}=0\). Assume that
The notation \({\Upgamma\in \mathbb{R}^{n\times n}}\) represents the diagonal inner coupling matrix between two connected nodes. τ(k) is a time-varying delay with respect to each instant of time k and satisfies \({\tau(k)\in \mathbb{Z}_{-\tau}}\). \({\phi(\bullet):\mathbb{Z}_{-\tau}\longrightarrow \mathbb{R}^{n\times N}}\) is smooth everywhere except at a finite number of points. The norm of ϕ(•) is defined by \({\|\phi(\theta)\|_{\tau}=\sup_{\theta \in \mathbb{Z}_{-\tau}}\{\|\phi(\theta)\|\}}\).
In order to design an impulsive control scheme to synchronize system (1), we consider the evolutionary state is abruptly jumping at every impulsive instant of time k u from its open-loop state, which can be formulated by
where x * i (k m,u ) stands for the primal state at time instant k m,u without impulsive jump. As usual, every impulsive instant of time k l,u satisfies \(0=k_{0,u}<k_{1,u}<k_{2,u}<\cdots<k_{m,u}<k_{m+1,u}<\ldots\) and \({\lim\nolimits_{m\rightarrow \infty}k_{m,u}=\infty;\;J_u:\mathbb{R}^{n}\rightarrow \mathbb{R}^{n}(m=1,2,\ldots)}\) represents the impulsive jump strength. Therefore, at every impulsive instant of time k m,u , the coupled states x i (k) − x j (k) between connected node i and j can be described by
Intuitively, a family of impulsive controller can be designed as
where U i (k, x i (k)) represents a class of impulsive controller at each instant of time \(k_{m,u};\;\delta(\bullet)\) denotes the Dirac discrete-time function. Correspondingly, by virtue of impulsive controller, the closed-loop discrete complex networks can be derived by the following form:
Assumption 1
For each nonlinear function \({\bf f_i(\bullet)}\;(i=1,2,\ldots ,n)\), suppose that it is globally Lipschitz continues function and satisfies
where \(\hat l_i\) is certain positive constant.
Definition 1
The system of the impulsive controlled discrete complex networks (7) is said to be globally exponentially synchronized, if for any initial condition \({\phi (\bullet):\mathbb{Z}_{-\tau}\rightarrow\mathbb{R}^{n\times N}}\), and there exist two positive constants λ and M 0 ≥ 1 such that
holds for all k > k 0.
Lemma
[18] Let \({{\bf W}=(w_{ij})_{N\times N},\;{\bf P} \in \mathbb{R}^{n\times n},\;{\bf x}=(x_1,x_2,\;\ldots,x_N)^{T}}\) and \({\bf y}=(y_1,y_2,\ldots ,y_N)^{T}\) with \({x_k,\;y_k \in \mathbb{R}^{N}\;(k=1,2,\ldots ,N)}\). If W = W T and each row sum of W is zero, then
3 Main results
When the impulsive controller can be functioning simultaneously at the state of discrete complex networks’ switching signal, the equivalent impulsive controlled system is rewritten by using the matrix Kronecker product (see [38])
for any \({k,\;m\in \mathbb{N}}\).
Theorem 1
Under Assumption 1., the impulsive controlled complex network (12) is exponentially synchronized if there exist certain positive integer m τ, positive scalars \(\varepsilon_{\sigma (k)},\;p_{\sigma (k)},\;q_{\sigma (k)}\), and positive-definite matrices \({P_{\sigma (k)}\in \mathbb{R}^{n\times n},\;Q_{l,\sigma (k)}\in \mathbb{R}^{n\times n}\;(l=1,2,\ldots 6)}\) such that
-
Given μ ≥ 1 and \(P_{\sigma (k_{m,x})}\le \mu P_{\sigma (k_{m+1,x})}\), for any \(k\in [k_{m,x},k_{m+1,x}-1]\) in corresponding sub-state σ(k m,x ),
$$p_{\sigma(k_{m,x})}-\left[\frac{\lambda_{\rm max}(\Uppi_{\sigma(k_{m,x})})} {\lambda_{\rm min}\left(P_{\sigma(k_{m,x})}^{-1}\right)}+ \mu q_{\sigma(k_{m,x})} \frac{\lambda_{\rm max}(\Upomega_{\sigma(k_{m,x})})}{\lambda_{\rm min} \left(P_{\sigma(k_{m-m_{\tau},x})}^{-1}\right)}\right]\geq0,$$(14)where
$$\begin{aligned} \Uppi_{\sigma(k_{m,x})}&=A^{T}P_{\sigma(k_{m,x})}A+L^{T}B^{T}P_{\sigma(k_{m,x})}BL \\ & \quad +L^{T}B^{T}P_{\sigma(k_{m,x})}^{T}Q_{1,\sigma(k_{m,x})}P_{\sigma(k_{m,x})}BL \\ & \quad +A^{T}Q_{1,\sigma(k_{m,x})}A +A^{T}Q_{2,\sigma(k_{m,x})}^{-1}A \\ & \quad -NC_{\sigma(k_{m,x})}A^{T}Q_{3,\sigma(k_{m,x})}^{-1}AC_{\sigma(k_{m,x})} \\ & \quad -L^{T}NC_{\sigma(k_{m,x})}B^{T}Q_{5,\sigma(k_{m,x})}BC_{\sigma(k_{m,x})}L \\ & \quad +L^{T}B^{T}Q_{4,\sigma(k_{m,x})}BL \\ \Upomega_{\sigma(k_{m,x})}&=L^{T}D^{T}P_{\sigma(k_{m,x})} DL-NC_{\sigma(k_{m,x})}^{2}\Upgamma^{T}P_{\sigma(k_{m,x})}\Upgamma \\ & \quad +L^{T}D^{T}P_{\sigma(k_{m,x})}^{T}Q_{2,\sigma(k_{m,x})}P_{\sigma(k_{m,x})}DL \\ & \quad -\Upgamma^{T}P_{\sigma(k_{m,x})}^{T}Q_{3,\sigma(k_{m,x})}P_{\sigma(k_{m,x})}\Upgamma \\ & \quad +L^{T}D^{T}P_{\sigma(k_{m,x})}^{T}Q_{4,\sigma(k_{m,x})}P_{\sigma(k_{m,x})}DL \\ & \quad -\Upgamma^{T}P_{\sigma(k_{m,x})}^{T}Q_{5,\sigma(k_{m,x})}P_{\sigma(k_{m,x})}\Upgamma \\ & \quad -L^{T}NC_{\sigma(k_{m,x})}D^{T}Q_{6,\sigma(k_{m,x})}^{-1}DC_{\sigma(k_{m,x})}L \\ & \quad -\Upgamma^{T}P_{\sigma(k_{m,x})}^{T}Q_{6,\sigma(k_{m,x})}P_{\sigma(k_{m,x})}\Upgamma. \\ \end{aligned}$$ -
\(\mu\lambda_{\rm max}^{2}(1+J_u(k_{m,x}))<\text{e}^{\varepsilon_{\sigma(k_{m,x})} (k_{m+1,x}-k_{m,x})}\).
-
\(q_{\sigma(k_{m,x})}\geq \text{e}^{\varepsilon_{\sigma(k_{m,x})}(k_{m+1,x}-k_{m,x}+1)+ \sum\nolimits_{i=0}^{m_{\tau}-1}\varepsilon_{k_{m-i,x}}(k_{m+1-i,x}-k_{m-i,x})}\), where \(m_{\tau}=\lceil\frac{\tau}{\inf\{k_{m,x}-k_{m-1,x}\}}\rceil\).
Proof
Consider the following Lyapunov function:
for any \(k\in[k_{m,x},k_{m+1,x}-1],\;\quad m=1,2,\ldots\) where
Let \(\varphi(\|\phi_{i}(\theta)-\phi_{j}(\theta)\|^{2}) =\lambda_{\rm max}(P_{\sigma(\theta)})\|\phi_{i}(\theta)-\phi_{j}(\theta)\|^{2}\), thus for the case \({k\in \mathbb{Z}_{\tau}}\),
Choose M ≥ 1, such that
By claiming that
We first need to show that
Obviously, for \(k\in [k_{0,x}-\tau,k_{0,x}-1]\),
If (19) is not true, then there exists certain instant of time \(\bar{k}\in [k_{0,x},k_{1,x}-1]\) satisfying
such that
and
Considering that
from which we have
Therefore,
And for any \(k\in [k^{\ast},\bar{k}-1]\),
Consider the increment of V(k) along the solution of discrete complex networks (12) in the interval \(k\in [k^{\ast},\bar{k}-1]\), one observes
Note that
For the simplicity of calculation, we define
According to Lemma 1, we can obtain that
Therefore, we obtain
We have a contradiction here and (19) is true. Next comes that we suppose the claim (18) holds for \(\hbox{m}= 1,2,\ldots ,\bar{m}\), such that
Correspondingly, we should prove the Eq. (18) holds for \(\hbox{m}=\bar{m}+1\),
Note that from (13) and condition (ii), we have
If (39) is not true, then there exists a natural number \(\bar{k}\) satisfying
Consequently, we have
Define
Thus, there exists \(k^{\ast}\) such that \(k^{\ast}<\bar{k}\).
For any \(k\in[k^{\ast}+1,\bar{k}]\), we have
and for any \(k\in[k^{\ast},\bar{k}]\),
Then, for any \(k\in[k_{\bar{m},x},k_{\bar{m}+1,x}-1]\), we can obtain
According to the condition (iii), one observes that for any \({s\in \mathbb{Z}_{\tau},\;k+s\in [k_{\bar{m}-m_{\tau},x},\bar{k}]}\).
Meanwhile for any \(k\in[k^{\ast},\bar{k}-1]\),
Consider that \(k=\bar{k}\), we have
which is a contradiction. Hence, the Eq. (39) holds for \(k=\bar{k}+1\). And by virtue of mathematical induction, the claim (18) is true for each \({k\in \mathbb{N}}\).
In view of (18) and Definition 1, it can be obtained that
For any \({k\in\mathbb{N}}\),
Therefor, for any \({k\in \mathbb{N}}\),
which implies
Therefore, the discrete complex networks (1) are globally exponentially synchronized under impulsive control. The proof is thus completed. □
Remark. We consider a multiple Lyapunov function for each sub-network with arbitrarily fast switching signal in our theorem, which results in a less conservation criterion.
Remark 1
In the switched Lyapunov function, p σ(k) gives an upper bound on the estimation of divergence rate for each running sub-network. By condition (ii) of Theorem 1, the impulsive control gain is designed to compensate divergence from system itself and deteriorating effect from arbitrarily fast switching. If some certain sub-networks could be self-synchronizing, the impulsive control gain only needs to compensate deteriorating effect.
4 Example and numerical simulations
This section presents a typical example to illustrate our result. Let us consider a 2-dimensional discrete chaotic neural network is given as the isolated node of a small-world network with 30 nodes,
where \(x(k)=(x_1(k),x_2(k))^{T},\;f(x(k))=(\text{tan}h(x_1(k)),\;\text{tan}h(x_2(k)))^{T},\;I(k)=(0,0)^T, \;A=\left[\begin{array}{cc} -1 & 0 \\ 0 & -1\end{array}\right],\;B=\left[\begin{array}{cc} 2 & -0.11 \\ -5 & 3.2\end{array}\right],\;D=\left[\begin{array}{cc} -1.6 & -0.1 \\ -0.18 & -2.4\end{array}\right],\) and \(\tau(k)=\frac{\text{e}^{k}}{1+\text{e}^{(k)}}.\) Obviously, Lipschitz constants can be 1 here. Consider a small-world model involved with three different sub-systems as follow
-
30 nodes are arranged in a ring, while each node i is adjacent to its neighbor node; each pair of nodes are coupled to the whole network by probability p = 0.02. See Fig. 1a.
-
30 nodes are arranged in a ring, while each node i is adjacent to its neighbor node; each pair of nodes are coupled to the whole network by probability p = 0.01. See Fig. 1b.
-
30 nodes are arranged in a ring, while each node i is adjacent to its 2 neighbor node; each pair of nodes are coupled to the whole network by probability p = 0.04. See Fig. 1c.

a N = 30, k = 2, p = 0.02; b N = 30, k = 2, p = 0.01; c N = 30, k = 4, p = 0.04; d Chaotic trajectory of each single node
The trajectory of each single node of this small-world model has been portrayed in Fig. 1d with random initial values in the interval [0.3, 3] and [−3, −0.3], respectively.
Let \(\Upgamma=diag\{0.15,0.3\}\), we can obtain the state response of each sub-network. Note that there is no switched rule in each sub-network here, and the initial values are randomly chosen in the interval [0.3, 3] and [−3, −0.3], respectively.
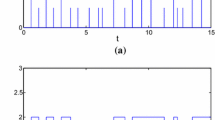
Given a switching signal σ(t) in Fig. 3a, we have the state response of the switched complex networks, see Fig. 3b. From Theorem 1, for each sub-network, we have
-
\(P_{1}=\left[\begin{array}{cc} 3.0001 & 0 \\ 0 & 3.0001\end{array}\right],\;Q_{1,1}=\left[\begin{array}{cc} 5.0690 & 0 \\ 0 & 5.0690\end{array}\right],\;Q_{2,1}=\left[\begin{array}{cc} 9.3812 & 0 \\ 0 & 9.3812\end{array}\right],\;Q_{3,1}=\left[\begin{array}{cc} 33.7971 & 0 \\ 0 & 33.7971\end{array}\right],\;Q_{4,1}=\left[\begin{array}{cc} 11.4594 & 0 \\ 0 & 11.4594\end{array}\right],\;Q_{5,1}=\left[\begin{array}{cc} 50.9300 & 0 \\ 0 & 50.9300\end{array}\right],\;Q_{6,1}=\left[\begin{array}{cc} 20.1879 & 0 \\ 0 & 20.1879\end{array}\right]\). And \(\varepsilon_1=0.6213,\;q_1<22.42\). Thus, \(J_{1}=\left[\begin{array}{cc} -0.6667 & 0 \\ 0 & -0.667\end{array}\right]\).
-
\(P_{2}=\left[\begin{array}{cc} 2.9998 & 0 \\ 0 & 2.9998\end{array}\right],\;Q_{1,2}=\left[\begin{array}{cc} 5.1333 & 0 \\ 0 & 5.1333\end{array}\right],\;Q_{2,2}=\left[\begin{array}{cc} 9.9398 & 0 \\ 0 & 9.9398\end{array}\right],\;Q_{3,2}=\left[\begin{array}{cc} 29.7933 & 0 \\ 0 & 29.7933\end{array}\right],\;Q_{4,2}=\left[\begin{array}{cc} 11.2764 & 0 \\ 0 & 11.2764\end{array}\right],\;Q_{5,2}=\left[\begin{array}{cc} 52.0308 & 0 \\ 0 & 52.0308\end{array}\right],\;Q_{6,2}=\left[\begin{array}{cc} 19.9970 & 0 \\ 0 & 19.9970\end{array}\right]\). And \(\varepsilon_2=0.8870,\;q_2<4.22\). Thus, \(J_{2}=\left[\begin{array}{cc} -0.4079 & 0 \\ 0 & -0.4079\end{array}\right]\).
-
\(P_{3}=\left[\begin{array}{cc} 13.4267 & 0 \\ 0 & 13.4267\end{array}\right],\;Q_{1,3}=\left[\begin{array}{cc} 10.2609 & 0 \\ 0 & 10.2609\end{array}\right],\;Q_{2,3}=\left[\begin{array}{cc} 3.1001 & 0 \\ 0 & 3.1001\end{array}\right],\;Q_{3,3}=\left[\begin{array}{cc} 16.6667 & 0 \\ 0 & 16.6667\end{array}\right],\;Q_{4,3}=\left[\begin{array}{cc} 5.2060 & 0 \\ 0 & 5.2060\end{array}\right],\;Q_{5,3}=\left[\begin{array}{cc} 30.8123 & 0 \\ 0 & 30.8123\end{array}\right],\;Q_{6,3}=\left[\begin{array}{cc} 3.0112 & 0 \\ 0 & 3.0112\end{array}\right]\). And \(\varepsilon_3=0.1062,\;q_3<12.62\). Thus, \(J_{3}=\left[\begin{array}{cc} -1.1576 & 0 \\ 0 & -1.1576\end{array}\right]\).
It is shown from Fig. 2a–c that all of nodes in each sub-network could not reach into a synchronous state without a control. Indeed, the switched signal plays a role of deterioration accelerator to diverge the synchronous state, shown in Fig. 3b. Once the feasible impulsive controller is placed on discrete complex networks with topology switching, such complex networks would be synchronized, see Fig. 3c.

a The state responses of sub-networks 1; b the state responses of sub-networks 2; c the state responses of sub-networks 3

a The switching signal σ(t); b the state responses of the switched system; c the synchronized state under impulsive control
5 Conclusion
In this paper, we have investigated impulsive synchronization control of a discrete delayed complex network with switching topology by using Lyapunov-Ruzimiki method. A time-varying delay-dependent criteria for exponential synchronization is presented guarantee the switched discrete complex networks tending to be a synchronous manifold. It is worthwhile to see time-varying delay can take any value, even larger than any dwell time of a sub-network. Furthermore, a numerical example with three sub-networks is presented by using the impulsive control technique.
References
Watts DJ, Strogatz SH (1998) Collective dynamics of ’small-world’ networks. Nature 393:440–442
Barabási AL, Albert R (1999) Emergence of scaling in random networks. Science 286:509–512
Strogatz SH (2001) Exploring complex networks. Nature 410:268–276
VanWiggeren GD, Roy R (1998) Communication with chaotic lasers. Science 279:1198–1200
Fischer I, Liu Y, Davis P (2000) Synchronization of chaotic semiconductor laser dynamics on subnanosecond time scales and its potential for chaos communication. Phys Rev A 62:011801-1–011801-4
Hoppensteadt FC, Izhikevich EM (2000) Pattern recognition via synchronization in phase-locked loop neural networks. IEEE Trans Neural Netw 11:734–738
Wang XF, Chen GR (2002) Synchronization in scale-free dynamical networks:robustness and fragility. IEEE Trans Circuits Syst I, Reg Papers 49:54–62
Wu C (2005) Synchronization in networks of nonlinear dynamical systems coupled via a directed graph. Nonlinearity 18:1057–1064
Wang Z, Wang Y, Liu Y (2010) Global synchronization for discrete-time stochastic complex networks with randomly occurred nonlinearities and mixed time delays. IEEE Trans Neural Netw 21:11–25
Li X, Wang XF, Chen G (2004) Pinning a complex network to its equilibrium. IEEE Trans Circuits Syst I Reg Papers 51:2074–2087
Zhou J, Lu J, Lü J (2006) Adaptive synchronization of an uncertain complex dynamical networks. IEEE Trans Autom Control 51:652–656
Chen T, Liu X, Lu W (2007) Pinning complex networks by a single controller. IEEE Trans Circuits Syst I Reg Papers 54:1317–1326
Lu W, Chen T (2004) Synchronization analysis of linearly coupled networks of discrete time systems. Phys D 198:148–168
Ribeiro A, Zhu R, Kauffman SA (2006) A general modeling strategy for gene regulatory networks with stochastic dynamics. J Comput Biol 13:1630–1639
Yao J, Wang HO, Guan ZH, Xu W (2009) Passive stability and synchronization of complex spatio-temporal switching networks with time delays. Automatica 45:1721–1728
Atay FM, Biyikoglu T, Jost J (2006) Network synchronization: spectral versus statistical properties. Phys D 224:35–41
Belykh IV, Belykh VN, Hasler M (2004) Blinking model and synchronization in small-world networks with a time-varying coupling. Phys D 195:188–206
Wu CW, Chua LO (1995) Synchronization in an array of linearly coupled dynamical systems. IEEE Trans Circuits Syst I Reg Papers 42:430–447
Barahona M, Pecora LM (2002) Synchronization in small-world systems. Phys Rev Lett 89:054101
Lu W, Atay FM, Jost J (2007) Synchronization of discrete-time networks with time-varying couplings. SIAM J Math Anal 39:1231–1259
Lu J, Ho DWC, Wu L (2009) Exponential stabilization in switched stochastic dynamical networks. Nonlinearity 22:889–911
Zhou J, Wu Q, Xiang L (2011) Pinning complex delayed dynamical networks by a single impulsive controller. IEEE Trans Circuits Syst I Reg Papers 58:2882–2893
Lu J, Ho DWC, Wang ZD (2009) Pinning stabilization of linearly coupled stochastic neural networks via minimum number of controllers. IEEE Trans Neural Netw 20:1617–1629
Lu J, Kurths J, Cao JD, Mahdavi N, Huang C (2012) Synchronization control for nonlinear stochastic dynamical networks: pinning impulsive strategy. IEEE Trans Neural Netw Learn Syst 23:285–292
Huang T, Chen G, Kurth J (2011) Synchronization of chaotic systems with time-varying coupling delays. Discrete Contin Dyn Syst Ser B 16:1071–1082
Huang T, Li C, Gao D, Xiao M (2012) Anticipating synchronization through optimal feedback control. J Global Optim 52:281–290
Wen S, Zeng Z, Huang T (2012) Adaptive synchronization of memristor-based Chua's circuits. Phys Lett A 376:2775–2780
Wen S, Zeng Z, Huang T (2012) H-infinity filtering for neutral systems with mixed delays and multiplicative noises. IEEE Trans Circuits Syst Part II 59(11):820–824
Wen S, Zeng Z, Huang T (2013) Robust probabilistic sampling H output tracking control for a class of nonlinear networked systems with multiplicative noises. J Franklin Inst 350:1093–1111
Yang T (2001) Impulsive systems and control: theory and applications. Nova Science, Huntington, NY
Li CD, Shen YY, Feng G (2008) Stabilizing effects of impulse in delayed BAM neural networks. IEEE Trans Circuits Syst II Brief Papers 53:1284–1288
Li CJ, Li CD, Liao XF, Huang TW (2011) Impulsive effects on stability of high-order BAM neural networks with time delays. Neurocomputing 74:1541–1550
Li CJ, Li CD, Huang TW (2011) Exponential stability of impulsive high order Hopfield-type neural networks with delays and reaction–diffusion. Int J Comput Math 88:3150–3162
Song QK, Cao J (2007) Stability analysis of impulsive cohen-grossberg neural network with unbounded discrete time-varying delays. Int J Neural Syst 17(5):407–417
Song QK, Wang Z (2008) Stability analysis of impulsive stochastic Cohen-Grossberg neural networks with mixed time delays. Phys A 387(13):3314–3326
Song QK, Cao J (2007) Impulsive effects on stability of fuzzy Cohen-Grossberg neural networks with time-varying delays. IEEE Trans Syst Man Cybern B Cybern 37(3):733–741
Song QK, Zhang JY (2008) Global exponential stability of impulsive Cohen-Grossberg neural network with time-varying delays. Nonlinear Anal Real World Appl 9(2):500–510
Langville AN, Stewart WJ (2004) The Kronecker product and stochastic automata networks. J Comput Appl Math 167:429–447
Acknowledgments
This research is supported by Australia Government grant through the Collaborative Research Network (CRN) to the university of Ballarat.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution License which permits any use, distribution, and reproduction in any medium, provided the original author(s) and the source are credited.
About this article
Cite this article
Li, C., Gao, D.Y., Liu, C. et al. Impulsive control for synchronizing delayed discrete complex networks with switching topology. Neural Comput & Applic 24, 59–68 (2014). https://doi.org/10.1007/s00521-013-1470-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-013-1470-3