
Abstract
Maintaining frequency stability is one of the central objectives of power grid operation. While this task is currently primarily done by employing stored rotational energy, in a converter-dominated grid fed by renewables, sources, such as wind and photovoltaic, must be involved in the frequency control of the power grid in order to maintain a stable, efficient grid operation in the process of achieving carbon neutrality. However, due to the lack of rotational inertia reserves, the converter requires additional energy storage devices to respond to the grid’s frequency regulation requirements. For modeling a converter-dominated grid, the behavior of such additional short-time storage must be modeled properly in order to obtain realistic simulation results, which allow drawing conclusions about the frequency stability behavior of the grid. This paper investigates the boundaries of the dynamic performance of the output current of the energy storage device so that the converter can achieve the function of frequency regulation in a more economical manner. In this paper, a dynamic supporting converter based on a phase-locked loop and a grid-forming converter, as well as the DC link of the converter containing an energy storage system, are modeled. On this basis, the optimal boundaries of the dynamic performance of the output current of the energy storage device are investigated. It is concluded that not only the proper sizing of grid-supporting energy storage devices is important for proper grid operation, but the dynamic behavior also has to be modeled and designed properly in order to guarantee a stable operation under all circumstances.
Zusammenfassung
Die Aufrechterhaltung der Frequenzstabilität ist eines der zentralen Ziele des Stromnetzbetriebs. Während diese Aufgabe derzeit hauptsächlich durch den Einsatz von gespeicherter Rotationsenergie erfüllt wird, müssen in einem von Erneuerbaren Energien gespeisten Netz Quellen, wie Windenergie und Photovoltaik, in die Frequenzregelung des Stromnetzes miteinbezogen werden. Diese Miteinbeziehung hält einen stabilen und effizienten Netzbetrieb auf dem Weg zur Klimaneutralität aufrecht. Aufgrund der fehlenden Rotationsträgheitsreserven benötigt der Umrichter jedoch zusätzliche Energiespeicher, um auf die Anforderungen der Frequenzregelung des Netzes zu reagieren. Für die Modellierung eines umrichterdominierten Netzes muss das Verhalten eines solchen zusätzlichen Kurzzeitspeichers richtig modelliert werden, um realistische Simulationsergebnisse zu erhalten, die Rückschlüsse auf das Frequenzstabilitätsverhalten des Netzes zulassen.
In diesem Beitrag werden die Grenzen des dynamischen Verhaltens des Ausgangsstroms des Energiespeichers untersucht, damit der Umrichter die Funktion der Frequenzregelung auf wirtschaftlichere Weise erfüllen kann. Es wird ein dynamisch unterstützender Umrichter auf Basis eines Phasenregelkreises und ein netzbildender Umrichter samt Gleichspannungszwischenkreis des Umrichters mit integriertem Energiespeichersystem modelliert. Auf dieser Grundlage werden die optimalen Grenzen der dynamischen Leistung des Ausgangsstroms des Energiespeichers untersucht. Darauf aufbauend kann gefolgert werden, dass nicht nur die richtige Dimensionierung von netzunterstützenden Energiespeichern für einen ordnungsgemäßen Netzbetrieb wichtig ist, sondern auch auf die richtige Modellierung und Auslegung des dynamischen Verhaltens geachtet werden muss, um unter allen Umständen einen stabilen Betrieb zu gewährleisten.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
To achieve carbon neutrality as quickly as possible, more clean renewable energy sources such as wind and photovoltaic power need to be connected to the power grid [1]. Converters can flexibly and efficiently convert renewable primary energy into electricity and inject a stream of green energy into the public grid.
Unlike conventional rotating generators, the energy conversion hardware of power semiconductor-based converters does not include mechanical rotational parts, which acts stores energy in the form of rotational energy. [2]. As a result, the converter cannot store sufficient energy for grid frequency regulation through rotational inertia. As the share of converter-based power generation systems increases, the reserve inertia in the grid continues to decrease [3]. This poses a challenge to the frequency stability of grid operation. In recent years, there have been a number of frequency incidents on the grid due to renewable generation equipment [4].
On the other hand, due to the flexibility of the converter, frequency support of the grid can also be achieved by adjusting the control algorithms of the converter to meet the Rate of Change of Frequency (ROCOF) requirements for grid operation, after the installation of additional electrical energy storage devices. There are currently two main types of such converters, the dynamic supporting converter based on phase-locked loops [5] and the Grid forming converter based on the droop control [6] or virtual synchronous generator concept [7].
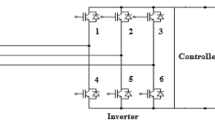
When the grid frequency fluctuates, the converter is required to immediately output the corresponding active power to suppress the frequency fluctuation. The energy the converter can supply quickly is limited by the source energy and in most cases can not immediately respond to the power change sufficiently. For this reason, electrical energy storage devices are required to provide additional power to support the converter’s rapid power changes [8]. The hardware topology of a grid-side converter is shown in Fig. 1.

Hardware topology of a grid-side converter
As shown in Fig. 1, the hardware part of the converter contains a grid-side filter, a DC/AC inverter, a DC capacitor, a DC/DC converter, and an electrical energy storage device. Where pm is the input power from the energy source, pout is the output power to the grid, and pst is the output/input power from the DC/DC converter and energy storage. Due to the nature of the electrical energy storage device, a DC/DC converter is installed in the system to regulate the input/output current to the DC link from the energy storage system.
When the output power on the DC link is not equal to the input power from the source energy side, e.g., when the grid frequency fluctuates, the DC voltage will also fluctuate. When the output power is greater than the input power, the DC voltage drops, and vice versa. An excessively high DC voltage can damage the power semiconductor components in the converter, while an excessively low DC voltage can lead to over-modulation and prevent the converter from operating properly. Since the DC capacitor [9] have a very limited buffering effect due to their very small energy storage capacity. In order to maintain a stable DC voltage, an additional electrical storage device must be installed.
The installation of additional electrical energy storage devices in converters can lead to increased costs. A large number of studies [10,11,12,13] have therefore investigated the optimal energy capacity of energy storage devices, with a view to finding a balance between meeting the grid requirements for ROCOF and economic considerations. But it is not only the energy capacity of the storage device that affects its cost, but also its maximum output power and its maximum output current change rate. This power/current response rate not only affects the cost, but also plays a crucial role in whether the energy storage device can meet the grid’s ROCOF requirements while maintaining stable converter operation.
This paper therefore investigates the dynamic performance of the output power/current of energy storage devices based on the modelling of phase-locked loop based dynamic supporting converters and Grid forming converters. In order to find boundaries on the optimal dynamic performance of the energy storage device while satisfying the grid’s ROCOF requirements.
The remainder of the paper is organized as follows, with Section II providing a simplified modelling of the two different converter control types and modelling their and the energy storage device’s impact on the DC link. Section III will investigate the boundaries on the dynamic performance of the energy storage devices based on the modelling and verify them with simulations. Section IV concludes the full paper.
2 Modelling of converters
In this section, different types of converters are modelled. Section II.A and II.B model the active power-frequency regulation function. Section II.C models the DC link of the converter and derives the transfer function for the output current of an ideal energy storage device. The control bandwidth of the converter’s internal loop control, e.g., current and voltage control, is several orders of magnitude higher than that of the active power-frequency as well as the DC voltage control [14]. In this paper, therefore, the inner-loop control of the converter is approximated as a unit gain amplifier. Furthermore, in the derivation of this paper, the per unit values are used.
2.1 Modeling of dynamic supporting converter based on phase-locked loop
The control block diagram of a typical frequency-active power regulation function of a phase-locked-loop-based dynamic supporting converter (hereafter referred to as dynamic support) is illustrated in Fig. 2. It uses a droop control concept to meet the grid requirements for ROCOF.

Control block diagram of a typical frequency-active power regulation function of a phase-locked-loop-based dynamic supporting converter
A framework of stability analysis for power electronic equipment is proposed by this paper, as shown in Fig. 1. This framework is obtained from combining the three dimensions of number of power electronic equipment, time-scale and analysis range of system behavior.
According to Fig. 2, its mathematical description can be deduced as follows:
where \({p}_{\mathrm{ds}}^{*}\) is the output active power reference, when the converter’s inner loop control is approximated as a unity gain amplifier, the actual output power of the converter \({p_{\mathrm{ds}}=p}_{\mathrm{ds}}^{*}\). Dp−ds is the droop factor, which is parameterized according to the grid’s ROCOF requirements. \(\omega ^{*}\) is the reference angular frequency and ωPLL is the grid angular frequency measured through the phase-locked loop. p0 is the reference output active power of the converter.
The frequency-active power regulation function regulates the output active power of the converter in accordance with the change in the angular frequency of the grid voltage. In order to improve the modelling accuracy, the influence of the phase-locked loop on the frequency-active power regulation must also be taken into account. Fig. 3 shows a typical synchronous rotating frames phase-locked loop (SRF-PLL) [15].

Control block diagram of a synchronous rotating frames phase-locked loop
The voltages from the grid vabc are transformed by abc/dq transform into the d‑ and q‑axis components of the voltage vdand vq. The input variable θPLL of the abc/dq transform matrix is adjusted by the PLL control loop until \(v_{q}=0\). That is, the d‑axis component of the voltage coincides with the d‑axis component of the grid voltage, at which point θPLL is equal to the grid voltage phase θg. This adjustment can be accomplished by a proportional integrator regulation as shown in Fig. 3. It is worth noting that the output of the proportional integrator is superimposed with a feed-forward angular frequency ω0 to improve the dynamic response of the system. Furthermore, the integration of the output angular frequency ωPLL gives the output phase θPLL of the phase-locked loop.
Following Fig. 3, the small-signal model expression (2) for the phase-locked loop can be derived:
where \({k}_{P}^{\mathrm{PLL}}\) and \({k}_{I}^{\mathrm{PLL}}\) are the proportional and integral coefficients of the proportional-integral regulator, respectively.
When the grid voltage is
its d‑ and q‑axis components can be obtained after the abc/dq transformation:
Substituting (3) into (4), the expression (5) for the q‑axis component of the grid voltage after the abc/dq transformation is obtained:
To adapt to the requirements of the small signal modelling, it is assumed that the phase-locked loop can track the grid phase without static differences in the steady state case, i.e., \(\theta _{\mathrm{PLL}}\approx \theta _{g}\). Then the sinusoidal part of equation (5) can be approximated as:
After substituting (6) into (5), then substitute into (2) to obtain the closed-loop transfer function of the phase-locked loop:
The integration of the angular frequencies gives the phase, as shown in (8):
The transfer function (9) for the frequency-active power regulation of the dynamic supporting converter is obtained by substituting (8) into (7) and then into (1):
2.2 Modeling of Grid forming converter
The two most commonly used control block diagrams for the Grid Forming control concept are shown in Fig. 4, which are (a) droop control with a first-order low-pass filter, and (b) a virtual synchronous generator.

Control block diagram of the Grid Forming control. a Droop control with first-order low-pass filter; b virtual synchronous generator
In Fig. 4a, the difference between the reference active power p0 and the output active power pGFM is regulated by the droop factor Dp−GFM after passing through a first-order low-pass filter with cut-off frequency ωp and the output angular frequency ωGFM. In Fig. 4b, the control loop mimics the rotor equations of a synchronous generator, with D and J being its damping and inertia coefficients respectively. In [16], it was shown that the two control structures in Fig. 4a and Fig. 4b are mathematically equivalent, so in this paper, the droop control with a first-order low-pass filter in Fig. 4a is modelled.
The phase angle of the converter output can be obtained from Fig. 4a as follows:
Without considering the resistive part of the grid impedance, the output power of the converter is
where U and V are the amplitude of the output voltage of the converter and grid voltage respectively. X is the reactance part of the grid impedance.
In the strong grid case, it is assumed that the Grid forming’s phase of the in the steady state case is close to the grid voltage’s phase, i.e., \(\theta _{\mathrm{GFM}}\approx \theta _{g}\). Then the sinusoidal part of (11) can be approximated as:
Substitute (12) into (11) to obtain an expression for the active power output of the converter:
where \({p}_{\max }^{\text{GFM}}=\frac{UV}{X}\).
The integration of the angular frequencies gives the phase, as shown in (14):
The transfer function (15) for the frequency-active power regulation of the Grid Forming converter is obtained by substituting (14) into (13) and then into (10):
2.3 Modelling of the DC link
In order to investigate the effect of dynamic active power output on the DC link voltage, the converter’s DC link is modelled in this section. Fig. 5 shows the topology of the converter’s DC link containing energy storage device.

Topology of the converter’s DC link containing energy storage device
On the left side in Fig. 5 is the energy source of the converter, i.e., wind turbine, photovoltaic cell, etc. The active power input to the DC side from the energy source is pm and the input current is \({i}_{\mathrm{in}}^{m}\). Cdc is the DC side capacitor which provides a buffer for the DC voltage stability. \({i}_{\mathrm{in}}^{\mathrm{st}}\) is the current injected into the DC link by the energy storage device, which in this section, the energy storage device and its attached DC/DC converter are simplified to a current source. On the right-hand side in Fig. 5 is the grid side of the converter, whose output active power is pout.
The mathematical expression for the DC link is obtained according to Fig. 5:
Linearization of (16) yields its expression in the s‑domain as:
In the steady state case, the input and output active power on the DC link are equal, i.e., \(p_{m0}=p_{\mathrm{out}0}\). Furthermore, it is assumed that the input active power remains constant over the time scale investigated in this paper, i.e., \(\Updelta p_{m}=0\). Then (17) can be simplified to (18):
Considering that the current input to the DC link from the energy storage device is subject to fluctuations in the DC voltage, let the expression be (19):
In order to suppress the fluctuation of the DC voltage, the input current from the energy storage device should be equal to the change in the current output from the converter. Substituting (9) and (15) into (18) and (19), the transfer functions for the energy storage devices’ ideal output currents of dynamic supporting converter and Grid forming converter are derived respectively:
3 Boundaries investigation of the dynamic performance of energy storage devices
3.1 Analytical investigation
When the output current of the energy storage device satisfies (20), the frequency fluctuations from the grid will not cause fluctuations in the DC voltage. This allows the converter to operate stably while meeting the ROCOF requirements [17] of the grid operation.
In order to satisfy the condition in (20), however, high power converters must increase their maximum current change rate or maximum output power by increasing the number of energy storage devices. This reduces the economic viability of the active power-frequency regulation function of high-power converters.
A DC capacitor also exists on the DC link which, although it has a limited energy storage capacity, also provides a part of power for a short period of time, in order to stabilise the DC voltage. With the assistance of the DC capacitor, the conditions for the energy storage device’s output current can be relaxed appropriately. A low-pass filter to the transfer function (20) can reduce its dynamic response speed and make it more economically viable. However, the reduced dynamic performance of the energy storage device must also be able to control fluctuations in the DC voltage within its threshold range, in order to protect the device and maintain stable operation. This section investigates the boundaries of the dynamic performance of the output current of an energy storage device, which should be able to keep fluctuations in the DC voltage within its threshold range.
The transfer functions of the output current of an energy storage device with a first-order low-pass filter and a second-order filter, respectively, are shown in (21) and Fig. 6. Where the transfer functions of the two low-pass filters are shown in (22).

Block diagram of the characteristic filter transfer function of an energy storage device
In (22), ωc is its cutoff angular frequency, i.e., \(\omega _{c}=2\pi f_{c}\), and ζ is the damping factor.
Substituting (20) into (21) and then into (18), the expression for the magnitude of the DC voltage change is derived as:
Where G1(s) and G2(s) are from dynamic supporting converter (24) and Grid forming converter (25) respectively, according to the type of converter:
The step response of (24) and (25) is brought into (23) to obtain the maximum variation of the DC voltage \({\Delta u}_{\mathrm{dc}}^{\max }\). In general, the DC voltage of the converter should not vary by more than 0.1 p.u. to protect the equipment and maintain stable operation of the converter.
3.2 Quantitative analysis
In the quantitative analysis, the grid frequency is varied by +1 Hz. The default values of the system parameters are shown in Table 1.
The rated DC voltage, DC capacitance, and rated input and output power in Table 1 are parameters of the converter itself. They are treated as controlled variables and are maintained constant in the quantitative analysis to investigate the impact of various energy storage devices on the same converter hardware.
Firstly, the influence of the cutoff frequency of the first-order low-pass filter on the maximum variation of the DC voltage \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\) is investigated, as shown in Fig. 7.

Influence of the cutoff frequency of the first-order low-pass filter on \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\)
In Fig. 7, the blue and red curves represent the influence of different fc of the first-order low-pass filter on the \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\) of the dynamic supporting converter and the Grid forming converter, respectively. The black curve represents \(\left| \Updelta u_{\mathrm{dc}}\right| =0.1\mathrm{p}.\mathrm{u}.\) The blue or red curve should not exceed the black curve. As a result, the fc of the low-pass filter in the energy storage device’s output current transfer function (21) of the dynamic supporting converter and the Grid forming converter should be greater than 60 Hz and 175 Hz, respectively.
Since there are two variables in the second-order low-pass filter, the cutoff frequency fc and the damping factor ζ, their effects on \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\) are shown in three dimensions figure, as shown in Figs. 8 and 9.

Influence of the parameters of the second-order low-pass filter on \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\) for dynamic supporting converter

Influence of the parameters of the second-order low-pass filter on \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\) for Grid forming converter
In Fig. 8, the vertical axis and longitudinal axis are the cutoff frequency fc and the damping factor ζ of the second-order low-pass filter, respectively, and the colors represent \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\), where yellow represents the region where \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right| > 0.1\mathrm{p}.\mathrm{u}.\) Closer to dark blue means \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\) is smaller. The red curve represents \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right| =0.1\mathrm{p}.\mathrm{u}.\), which is the parameter boundary of the second-order low-pass filter.
The higher the cutoff frequency fc, the smaller the \({\Delta u}_{\mathrm{dc}}^{\max }\). The larger the damping factor ζ is, the larger \({\Delta u}_{\mathrm{dc}}^{\max }\) is, but the effect of damping factor on \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\) is not as significant as that of cutoff frequency.
When the damping factor ζ = 0.707, the fc should be greater than 250 Hz to let \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right| \leq 0.1\mathrm{p}.\mathrm{u}.\)
In contrast to Fig. 8, the red curve in Fig. 9, where the parameter boundary of the second-order low-pass filter is closer to the left, means that the cutoff frequency of the second-order low-pass filter for the output current of the energy storage device of the Grid forming converter can be lower for the same damping factor. Combined with the findings in Fig. 7, the dynamic response of the output current of the energy storage device of a Grid forming converter can be slower without affecting the stability of the DC voltage. A converter with a dynamic supporting strategy, on the other hand, requires a faster dynamic response of the energy storage device.
Further, investigation of the influence of other control parameters on \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\) can be carried out in a similar way. Fig. 10 illustrates the influence of droop factor on \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\). Fig. 11 demonstrates the influence of the control bandwidth of the phase-locked loop in the dynamic supporting converter and the cut-off frequency of the first-order low-pass filter in the Grid forming on \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\).

Influence of the droop factor on \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\)

Influence of the control bandwidth of the PLL in the dynamic supporting converter and the cut-off frequency of the low-pass filter in the Grid forming on \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\)
In Fig. 10, the solid and dashed lines represent the first-order low-pass filter and second-order low-pass filter to the output current transfer functions of the different converter storage devices, respectively. The blue and red curves represent the effect of the frequency-power droop factor on the \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\) of the dynamic supporting converter and the Grid forming converter, respectively.
For the dynamic supporting converter, a lower droop factor results in a lower \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\), while for the Grid forming converter, the influence of droop factor on \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\) is not as significant as for the dynamic supporting converter.
In Fig. 11, for the dynamic supporting converter, a higher phase-locked loop cut-off frequency causes a larger \({\Delta u}_{\mathrm{dc}}^{\max }\), while for the Grid forming converter, the cut-off frequency of the low-pass filter has a less significant effect on \({\Delta u}_{\mathrm{dc}}^{\max }\).
Combined with the findings in Fig. 7, 8, 9 and 10, the Grid forming converter requires slower dynamic response from the energy storage device and its frequency-power control parameters are less affected by changes in the voltage fluctuations on the DC link.
3.3 Verification on time domain simulation
In order to verify the aforementioned findings, Matlab/Simulink based time domain simulations are performed in this section. The default values of the control parameters are shown in Table 1.
In Fig. 12, the blue curve represents the results of the time domain simulation and the red curve represents the theoretical results obtained by (23). The red and blue curves overlap before and after the DC voltage reaches its maximum value. Although the theoretically calculated curve (the red curve) deviates from the time domain simulation value later on, this does not affect the calculation of the maximum DC voltage. Therefore, the findings calculated by (23) are valid.

Second-order low-pass filter with \(f_{c}=200\,\mathrm{Hz}\) for the transfer function of the output current of the energy storage device in dynamic supporting converter
Fig. 12 and 13 show the time domain simulation results for different dynamic performances of energy storage device for the dynamic supporting converter, respectively. Fig. 14 and 15 show the time domain simulation results of the Grid forming converter with different dynamic performances of energy storage device.

Second-order low-pass filter with \(f_{c}=400\,\mathrm{Hz}\) for the transfer function of the output current of the energy storage device in dynamic supporting converter

Second-order low-pass filter with \(f_{c}=50\,\mathrm{Hz}\) for the transfer function of the output current of the energy storage device in Grid forming converter

Second-order low-pass filter with \(f_{c}=200\,\mathrm{Hz}\) for the transfer function of the output current of the energy storage device in Grid forming converter
Following the desired parameter boundaries for the second-order low-pass filter of Fig. 8, \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\) will exceed 0.1 p.u. if its cutoff frequency is 200 Hz when the damping factor is 0.707. The DC voltage variation in Fig. 12 also exceeds 0.1 p.u. This is consistent with the findings presented in Fig. 8.
Following the parameter boundaries of the second-order low-pass filter in Fig. 8, \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\) will be less than 0.1 p.u. if its cutoff frequency is 400 Hz when the damping factor is 0.707. The DC voltage variation in Fig. 13 is less than 0.7 p.u. This is also consistent with the findings shown in Fig. 8.
In Figs. 14 and 15, the curves calculated theoretically (red) and those obtained by time-domain simulation (blue) also coincide before and after the DC voltage reaches its maximum value. The findings obtained from the calculation of (23) are valid. According to the findings in Fig. 9, \(\left| {\Delta u}_{\mathrm{dc}}^{\max }\right|\) will be greater than 0.1 p.u. when the cutoff frequency is 50 Hz, which is consistent with the simulation results in Fig. 14. When the shear frequency is 200 Hz, \({\Delta u}_{\mathrm{dc}}^{\max }\) will be less than 0.1 p.u., which is in line with the simulation results in Fig. 15.
The time domain simulation results in Fig. 12, 13, 14 and 15 validate the correctness of the boundaries on the dynamic performance of the output current of the energy storage device of the converter proposed in this paper and also validate the correctness of the theoretical calculation method proposed in this section.
4 Conclusion
This paper investigates the boundaries of the dynamic characteristics of the output current of the converter’s energy storage devices in order to meet the ROCOF requirements for grid operation.
We modeled the active power/frequency regulation function of a dynamic supporting converter based on a phase-locked loop, as well as a Grid forming converter, and establishes a mathematical representation of the variation in grid frequency to the variation in converter output power. In addition, the DC link of the converter containing the energy storage device is also modelled.
On the basis of the modelling, an analytical expression for the fluctuation of the grid frequency to the voltage fluctuation on the DC link is established. The dynamic characteristics of the output current of the energy storage device are also quantified and the boundaries of the dynamic characteristics of the output current of the energy storage device of the converter are obtained.
In addition, the influence of the active power/frequency regulation control parameters of the converter on the converter operation is investigated in this paper.
The investigation results show that the dynamic performance of the output current of the energy storage device of a Grid forming converter can be slower than that of a dynamic supporting converter based on a phase-locked loop for the same parameters. Grid forming converters can therefore be fitted with more economical energy storage device. The paper concludes with a simulation validation of the aforementioned investigation methods and findings. In converter dominated grid, care must be taken to utilize energy storage in the DC link of converters, e.g., battery storage or supercaps for dynamic grid support, which is a necessary in order to operate a full renewable fed grid. Not only a proper sizing of the storage energy is needed, but also correct consideration of the dynamic behavior is also necessary, otherwise instabilities can occur during operation in the worst case.
References
Wang F, Harindintwali JD, Yuan Z, Wang M, Wang F, Li S, Chen JM (2021) Technologies and perspectives for achieving carbon neutrality. Innovation 2(4):100180
Zhang Z, Schürhuber R, Fickert L, Friedl K, Chen G, Zhang Y, Wang F (2020) Effect of phase-locked loop on dynamic performance of Grid Forming inverter. In: Wind Integration Workshop 2020: 19th International Workshop on Large-scale Integration of Wind Power into Power Systems as well as on Transmission Networks for Offshore Wind Power Plants. Energynautics,
Leon AE (2017) Short-term frequency regulation and inertia emulation using an MMC-based MTDC system. IEEE Trans Power Syst 33(3):2854–2863
Singh AK, Pal BC (2019) Rate of change of frequency estimation for power systems using interpolated DFT and Kalman filter. IEEE Trans Power Syst 34(4):2509–2517
Adib A, Fateh F, Mirafzal B (2019) A stabilizer for inverters operating in grid-feeding, grid-supporting and grid-forming modes. In: 2019 IEEE Energy Conversion Congress and Exposition (ECCE). IEEE, pp 2239–2244
Zhang L, Harnefors L, Nee HP (2010) Power-synchronization control of grid-connected voltage-source converters. IEEE Trans Power Syst 25(2):809–820
Zhang Z, Schürhuber R, Fickert L, Friedl K, Chen G, Zhang Y, Wang F (2021) Differences in transient stability between grid forming and grid following in synchronization mechanism. In: CIRED 2021—the 26th international conference and exhibition on electricity distribution, vol 2021. IET, pp 1096–1100
Zuo Y, Yuan Z, Sossan F, Zecchino A, Cherkaoui R, Paolone M (2021) Performance assessment of grid-forming and grid-following converter-interfaced battery energy storage systems on frequency regulation in low-inertia power grids. Sustain Energy Grids Netw 27:100496
Zhang Z, Schuerhuber R, Fickert L, Friedl K (2021) Study of stability after low voltage ride-through caused by phase-locked loop of grid-side converter. Int J Electr Power Energy Syst 129:106765
Markovic U, Häberle V, Shchetinin D, Hug G, Callaway D, Vrettos E (2019) Optimal sizing and tuning of storage capacity for fast frequency control in low-inertia systems. In: 2019 International Conference on Smart Energy Systems and Technologies (SEST). IEEE, pp 1–6
Bahramirad S, Reder W, Khodaei A (2012) Reliability-constrained optimal sizing of energy storage system in a microgrid. IEEE Trans Smart Grid 3(4):2056–2062
Yang B, Wang J, Chen Y, Li D, Zeng C, Chen Y, Sun L (2020) Optimal sizing and placement of energy storage system in power grids: a state-of-the-art one-stop handbook. J Energy Storage 32:101814
Fossati JP, Galarza A, Martín-Villate A, Fontan L (2015) A method for optimal sizing energy storage systems for microgrids. Renew Energy 77:539–549
Zhang Z, Schürhuber R, Fickert L, Friedl K, Chen G, Zhang Y (2021) Systematic stability analysis, evaluation and testing process, and platform for grid-connected power electronic equipment. Elektrotech Informationstech 138(1):20–30
Zhang Z, Schuerhuber R, Fickert L, Friedl K, Chen G, Zhang Y (2021) Domain of attraction’s estimation for grid connected converters with phase-locked loop. IEEE Trans Power Syst 37(2):1351–1362
Zhang Z, Lehmal C, Hackl P, Schuerhuber R (2022) Transient stability analysis and post-fault restart strategy for current-limited grid-forming converter. Energies 15(10):3552
Chown GA, Wright JG, Van Heerden RP, Coker M (2017) System inertia and Rate of Change of Frequency (RoCoF) with increasing non-synchronous renewable energy penetration
Funding
Open access funding provided by Graz University of Technology.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
P. Hackl and R. Schuerhuber are OVE members.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zhang, Z., Lehmal, C., Hackl, P. et al. Study of the dynamic performance boundaries of a converter’s energy storage device. Elektrotech. Inftech. 139, 682–692 (2022). https://doi.org/10.1007/s00502-022-01070-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00502-022-01070-9
Keywords
- Active power-frequency control
- Rate of Change of Frequency (ROCOF)
- Phase-locked loop
- Grid-forming
- Energy storage
- DC circuit