
Abstract
The generalizations of rough sets based on topological structures have become the hot topic of rough set theory. In the present article, based on the notion of \(j\)-neighborhood space and the related concept of \(j\)-simply open sets, three new methods for generalizing Pawlak rough sets are proposed and their properties are studied. These methods are compared with some of the previous methods. Moreover, we prove that the suggested approaches are more accurate than the other methods and then these approaches may be useful in real-life applications. Finally, an economic application in decision-making is introduced as a simple practical example to demonstrate the ideas proposed. It is providing a comparison between the proposed methods with already existing in the literature.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The abstract topology (Pawlak 1982) is the convenient mathematical paradigm for every combination related by relations. The notion of relation was used in generating and interpretation of topological methodologies in various areas such as physical analysis, the general sight of space–time, biology, biochemistry, and rough set model (for instance, (El-Atik 1997; Abo Khadra et al. 2007; Nawar and Atik 2019; Skowron and Dutta 2018; Tripathy and Mitra 2010; Tripathy and Nagaraju 2012; Tripathy 2018; Wang et al. 2013; Abd El-Monsef et al. 2015, 2014a, 2014b; El-Bably 2015a, 2015b; Mafizur Rahman 2017; Shokry and Aly 2013; Afridi et al. 2018; Hosny 2018; El-Bably and Fleifel 2017; Slowinski and Vanderpooten 2000; Nada et al. 2018; Lin 1998; Amer et al. 2017; Sierpinski and Krieger 1952; Yao 1996, 2013, 2018; Pawlak 1982; Yu et al. 2013)). Near open sets’ notion has been proposed as a new extension of open sets in the topological spaces (e.g., (El-Atik 1997; Neubrunnova 1975; Mashhour et al. 1982; Andrijević and Semi-preopen sets, ibid. 1986; Andrijević 1996; Abd El-Monsef 1980; Abd El-Monsef et al. 1983, 2014a; Levine 1963; Njastad 1965)).
In (1982), Pawlak proposed the theory of rough sets for handling ambiguity, imprecision, and uncertainty in data analysis. Established on the equivalence relation that generating from the data, he suggested the lower and upper approximations for dealing with the vagueness (ambiguity) are arising from the rough set. A concept that can consist of ambiguous data is categorized in this principle by a couple of two definite sets (namely, its lower and upper approximations). These approximations represent the key notions in the methodology of rough sets, which are well-defined according to equivalence classes. The approximations can be used to extract new details about the concept, for instance, in decision rules (or decision-making), the lower approximation shows the characteristics of objects that are definitely related to the concept, but those created via the upper approximation describe items that are possible to belong to the concept. So, the approximations of undefinable (rough) sets by definable sets are discussed. If the subset of the universe has equal approximations, then it is said to be a crisp (or exact) set. On the other hand, if the lower and upper approximations are not equal, then it is a rough (or inexact) set. Accordingly, the difference between the upper and lower approximation (which represents the boundary region) is the basic tool to identify the accuracy or the vagueness of the set. Consequently, we can identify the exactness or roughness of any subset by detecting the region of the boundary is empty or not, respectively. If the boundary region of a subset is not empty, then this interprets that there is not enough knowledge to describe it. For these reasons, the theory of rough set has numerous achievements in the different fields. However, the basic methodology of Pawlak’s philosophy is defining approximations by using a partition generated via an equivalence relation. This relation has constituted an impediment to the field of application because it is only dealing with an information system with whole information. So, to handle complex and difficult applied problems, many authors proposed numerous generalizations (for instance, the reader can see (El-Atik 1997; Neubrunnova 1975; Mashhour et al. 1982; Andrijević and Semi-preopen sets, ibid. 1986; Andrijević 1996; Abd El-Monsef 1980; Abd El-Monsef et al. 1983, 2014a; Levine 1963)) to expand the application fields of this theory.
To extend Pawlak rough sets, Yao (996) used an arbitrary relation for constructing lower and upper approximations without extra conditions on the relation. However, the main properties of Pawlak’s models did not hold for his approximations. Abd El-Monsef et al. (2014a) proposed a structure to generalize the standard rough set concept. In fact, they presented the notion of \(j\)-neighborhood space (briefly, \(j\)-NS) constructed by a binary relation. Moreover, they used a general topology generated from the binary relation to construct generalized rough sets. This methodology paved the way for extra topological presentations in the rough set contexts and helped to formalize various applications from daily-life problems. After then, Amer et al. (2017) applied some near open sets in \(j\)-NS and thus they succussed in generating new generalized rough set approximations, namely \(j\)-near approximations. In 2018, Hosny (2018) extends these approximations to different approximations using the concepts of \(\delta \beta\)-open and \(\wedge_{\beta }\)-open sets.
The core contribution of the present work is to propose three different methods for generalizing Pawlak rough sets and some of their generalizations, to reduce the boundary region and enlarge the accuracy degree which represents the core purpose of rough set philosophy. Therefore, the application fields of the rough set methodology are extended.
Firstly, in Sect. 3, we apply the concept of \(j\)-simply open sets in the \(j\)-NS and then new types of near open sets are defined. Properties of these sets are studied and their connections with the other types are investigated. Several counterexamples are suggested to illustrate those relationships. Additionally, some vital relationships and results of those sets are demonstrated. By applying the concept of \(j\)-simply open sets in the \(j\)-NS, new types of near open sets are defined, in Sect. 4. Thus, Sect. 4 introduces three different methods to generalize Pawlak’s models established by \(j\)-simply open sets. The first method of our approaches is based on these types of \(j\)-simply open sets, and hence, we propose generalized rough approximations, namely \(j\)-simply approximations as a generalization to Pawlak rough sets. We prove that these approximations satisfy all properties of Pawlak’s rough sets. Moreover, we illustrate that this method is a generalization to Pawlak’s rough sets and their generalizations. Some results are introduced to demonstrate that our approximations are stronger than the other methods. Accordingly, we introduce a comparison between our method and the other methods.
By using the ideas of \(j\)-simply open and \(\delta \beta\)-open (resp. \(\wedge_{\beta }\)-open) sets, new generalizations of Pawlak rough sets and some of its extensions (such as Abd El-Monsef et al., Y. Yao, W. S. Amer et al., and M. Hosny techniques) are established in the other two methods. Moreover, we will prove that the suggested methods strengthen the concept of the previous methods. Many comparisons between the proposed methods and the other ones are investigated in order to illustrate these facts. Therefore, the proposed methods may be convenient in the rough set environment for removing the ambiguity, and thus, it will be beneficial in decision-making.
Finally, in Sect. 5, an application example in economics is presented to explain the importance of the suggested techniques in decision-making. Besides, the proposed methods are compared with the previous methods. In fact, we use an information system (with decision attributes) collected from a real-life problem. This system depends basically on a reflexive relation which means that Pawlak’s rough sets can’t apply here. So, we apply our methods and the previous methods. We will show that the suggested methods are stronger and more accurate than the other methods. Therefore, we can say that our methods extend the application field for rough sets from a topological standpoint.
2 Basic concepts
The present section presents the necessary concepts that were used through the paper.
2.1 Pawlak rough set theory and its generalization
Definition 2.1
(Pawlak 1982) Consider the relation \(R\) is an equivalence relation on a finite set \(U\) called universe. The pair \(\left( {U,R} \right)\) is called an approximation space. For any \(X \subseteq U\), Pawlak proposed the lower and upper approximations of \(X\) by \(\underline {R} \left( X \right) = \left\{ {x \in X:\left[ x \right]_{R} \subseteq X} \right\}\) and \(\overline{R}\left( X \right) = \left\{ {x \in U:\left[ x \right]_{R} \cap X \ne \emptyset } \right\}\), respectively, where \(\left[ x \right]_{R}\) denotes to an equivalence class consists of \({\text{x}} \in {\text{U}}\).
Note that Pawlak (1982): \(X\) is said to be a rough set if \(\underline {R} \left( X \right) \ne \overline{R}\left( X \right)\). Otherwise, it is definable (or exact).
Proposition 2.1
Pawlak (1982) Suppose that \(\left( {U,R} \right)\) be an approximation space, \(\emptyset\) represents an empty set and \(X^{c}\) represents a complement of \(X\) in \(U\). Then, the followings are held:
(L1) \(\underline {R} \left( X \right) \subseteq X\) (L2) \(\underline {R} \left( \emptyset \right) = \emptyset\) (L3) \(\underline {R} \left( U \right) = U\) (L4) \(\underline {R} \left( {X \cap Y} \right) = \underline {R} \left( X \right) \cap \underline {R} \left( Y \right)\) (L5) If \(X \subseteq Y,\) then \(\underline {R} \left( X \right) \subseteq \underline {R} \left( Y \right)\) (L6) \(\underline {R} \left( X \right) \cup \underline {R} \left( Y \right) \subseteq \underline {R} \left( {X \cup Y} \right)\) (L7) \(\underline {R} \left( {X^{c} } \right) = (\overline{R}\left( X \right))^{c}\) (L8) \(\underline {R} \left( {\underline {R} \left( X \right)} \right) = \underline {R} \left( X \right)\) (L9) \(\underline {R} \left( {(\underline {R} \left( X \right))^{c} } \right) = (\underline {R} \left( X \right))^{c}\) | (U1) \(X \subseteq \overline{R}\left( X \right)\) (U2) \(\overline{R}\left( \emptyset \right) = \emptyset\) (U3) \(\overline{R}\left( U \right) = U\) (U4) \(\overline{R}\left( {X \cup Y} \right) = \overline{R}\left( X \right) \cup \overline{R}\left( Y \right)\) (U5) If \(X \subseteq Y,\) then \(\overline{R}\left( X \right) \subseteq \overline{R}\left( Y \right)\) (U6) \(\overline{R}\left( X \right) \cap \overline{R}\left( Y \right) \supseteq \overline{R}\left( {X \cap Y} \right)\) (U7) \(\overline{R}\left( {X^{c} } \right) = (\underline {R} \left( X \right))^{c}\) (U8) \(\overline{R}\left( {\overline{R}\left( X \right)} \right) = \overline{R}\left( X \right)\) (U9) \(\overline{R}\left( {(\overline{R}\left( X \right))^{c} } \right) = (\overline{R}\left( X \right))^{c}\) |
Yao (Yao 1996) have extended Pawlak approximation space by a generalized binary relation. In fact, he suggested rough approximations via the after set of a binary relation as shown in the next definition.
Definition 2.2
(1996) Consider \(R\) be any binary relation on \(U\). The lower and upper approximations of \(A \subseteq U\) are given, respectively, by \(\underline {R}_{n} \left( A \right) = \left\{ {x \in U:n\left( x \right) \subseteq A} \right\}\) and \(\overline{R}_{n} \left( A \right) = \left\{ {x \in U:n\left( x \right) \cap A \ne \emptyset } \right\}\), where \(n\left( x \right)\) represents the after set of \(x\), that is, \(n\left( x \right) = \left\{ {y \in U:xRy} \right\} = xR\). The boundary region and accuracy of the approximations are given, respectively, by
\(B_{n} \left( A \right) = \overline{R}_{n} \left( A \right) - \underline {R}_{n} \left( A \right)\), and \(\mu_{n} \left( A \right) = \frac{{\left| {\underline {R}_{n} \left( A \right)} \right|}}{{\left| {\overline{R}_{n} \left( A \right)} \right|}} ,{\text{ where}} \left| {\overline{R}_{n} \left( A \right)} \right| \ne 0\).
Note that: Yao proved that the above approximations satisfied the properties (L3-L9), and (U1, U2, U4-U9) in general case.
2.2 j-Neighborhood space and j-approximations
Abd El-Monsef et al. (2014a) introduced a framework to generalize Pawlak’s rough sets concept. In fact, they suggested different approximations based on a topological structure.
Definition 2.3
(Abd El-Monsef et al. 2014a) Suppose that \(R\) be an arbitrary binary relation on \(U\). The \(j\)-neighborhood of \(x \in U\), (denoted by \(N_{j} \left( x \right), \forall j \in \left\{ {r,{ }\ell ,{ }r, \ell , u, i, {\langle{u}\rangle},{\langle{i}\rangle}} \right\}\)), is given by
\(\left( {\text{i}} \right)\; r\)-neighborhood \({ }: N_{r} \left( x \right) = \left\{ {y \in U : xRy} \right\}\).
\(\left( {{\text{ii}}} \right) \; \ell\)-neighborhood\(:{ }N_{\ell } \left( x \right) = \left\{ {y \in U : yRx} \right\}\).
\(\left( {{\text{iii}}} \right) \; {\langle{r}\rangle}\)-neighborhood\(:{ }N_{\langle{r}\rangle} \left( x \right) = \bigcap\nolimits_{{x \in N_{r} \left( y \right)}} {N_{r} \left( y \right)}\).
\(\left( {{\text{iv}}} \right) \; {\langle{\ell}\rangle}\)-neighborhood\(:N_ {\langle{\ell}\rangle} \left( x \right) = \bigcap\nolimits_{{x \in N_{\ell } \left( y \right)}} {N_{\ell } \left( y \right)}\).
\(\left( {\text{v}} \right)\; i\)-neighborhood: \(N_{i} \left( x \right) = N_{r} \left( x \right) \cap N_{\ell } \left( x \right)\).
\(\left( {{\text{vi}}} \right) \; u\)-neighborhood: \(N_{u} \left( x \right) = N_{r} \left( x \right) \cup N_{\ell } \left( x \right)\).
\(\left( {{\text{vii}}} \right)\;{\langle{i}\rangle}\)-neighborhood: \(N_{\langle{i}\rangle} \left( x \right) = N_{\langle{r}\rangle} \left( x \right) \cap N_{\langle{\ell }\rangle} \left( x \right)\).
\(\left( {{\text{viii}}} \right)\; {\langle{u}\rangle}\)-neighborhood: \(N_{\langle{u}\rangle} \left( x \right) = N_{\langle{r}\rangle} \left( x \right) \cup N_{\langle{\ell }\rangle} \left( x \right)\).
Definition 2.4
(Abd El-Monsef et al. 2014a) Suppose that \(R\) be an arbitrary binary relation on \(U\) and a map \(\xi_{j} :U \to {\mathcal{P}}\left( U \right)\) assigns for each \(x \in U\) its \(N_{j} \left( x \right)\) in the power set \({\mathcal{P}}\left( U \right)\). Then, the triple \(\left( {U, R,\xi_{j} } \right)\) is said to be \(j\)-neighborhood space (briefly, \(j\)-NS).
Theorem 2.1
(Abd El-Monsef et al. 2014a) Let \(\left( {U, R,\xi_{j} } \right)\) be a \({ }j\)-NS. Then, the class \(\tau_{j} = \left\{ {X \subseteq U| \forall x \in X, N_{j} \left( x \right) \subseteq X } \right\}{ }\) is a topology on \(U\).
Proposition 2.2
(Abd El-Monsef et al. 2014a) Let \(\left( {U, R,\xi_{j} } \right)\) be a \({ }j\)-NS. Then,
\(\tau_{u } \subseteq \tau_{r } \subseteq \tau_{i }\) \(\tau_{u } \subseteq \tau_{{\ell { }}} \subseteq \tau_{i }\) | \(\tau_{\langle{u}\rangle} \subseteq \tau_{\langle{r }\rangle} \subseteq \tau_{\langle{i }\rangle}\) \(\tau_{\langle{u}\rangle} \subseteq \tau_{\langle{\ell }\rangle} \subseteq \tau_{\langle{i }\rangle}\) |
Definition 2.5
(Abd El-Monsef et al. 2014a) Let \(\left( {U, R,\xi_{j} } \right)\) be a \(j\)-NS. Then, a subset \(A \subseteq U\) is called \(j\)-open set if \(A \in \tau_{j}\). The complement of a \(j\)-open set is called \(j\)-closed and the family \(\Gamma_{j}\) of all \(j\)-closed sets is given by \(\Gamma_{j} = \left\{ { F \subseteq U | F^{c} \in \tau_{j} } \right\}\) and the \(j\)-interior (resp. \(j\)-closure) operator of \(A\) is given by
\({\varvec{int}}_{{\varvec{j}}} \left( A \right) = \cup \left\{ {G \in \tau_{j} :G \subseteq A} \right\}\)(resp. \({\varvec{cl}}_{{\varvec{j}}} \left( A \right) = \cap \left\{ {H \in {\Gamma }_{j} :A \subseteq H} \right\}\)).
Definition 2.6
(Abd El-Monsef et al. 2014a) Let \(\left( {U, R,\xi_{j} } \right)\) be a \(j\)-NS, and \({ }A \subseteq U\). Then, the (\(j\)-lower and \(j\)-upper) approximations, (\(j\)-boundary, \(j\)-positive and \(j\)-negative) regions and \(j\)-accuracy of the approximations of \({ }A \subseteq U\) are given, respectively, by
\(\underline {R}_{j} \left( A \right) = \cup \left\{ {G \in \tau_{j} :G \subseteq A} \right\} = {\varvec{int}}_{{\varvec{j}}} \left( A \right)\) ,
\(\overline{R}_{j} \left( A \right) = \cup \left\{ {H \in \Gamma_{j} :A \subseteq H} \right\} = {\varvec{cl}}_{{\varvec{j}}} \left( A \right)\) ,
\(B_{j} \left( A \right) = \overline{R}_{j} \left( A \right) - \underline {R}_{j} \left( A \right)\) ,
\(POS_{j} \left( A \right) = \underline {R}_{j} \left( A \right)\) ,
\(NEG_{j} \left( A \right) = U - \overline{R}_{j} \left( A \right)\), and
\(\mu_{j} \left( A \right) = \frac{{\left| {\underline {R}_{j} \left( A \right)} \right|}}{{\left| {\overline{R}_{j} \left( A \right)} \right|}} , where \left| {\overline{R}_{j} \left( A \right)} \right| \ne 0\).
2.3 \({\varvec{j}}\) -Near approximations operators in the \({\varvec{j}}\)-NS
Amer et al. (Amer et al. 2017) applied the notion of near open sets in the \(j\)-NS and thus they succussed in generating new generations to \(j\)-approximations, namely \(j\)-near approximations.
Definition 2.7
(Amer et al. 2017) Consider \(\left( {U, R,\xi_{j} } \right)\) be a \( j\)-NS. A subset \(A \subseteq U\) is called
-
(i)
\(j\)-Regular open (briefly \({\mathcal{R}}_{j}^{*}\)-open), if \(A = {\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( A \right)} \right)\).
-
(ii)
\(j\)-Pre-open (briefly \(P_{j}\)-open), if \(A \subseteq {\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( A \right)} \right)\).
-
(iii)
\(j\)-Semi-open (briefly \(S_{j}\)-open), if \(A \subseteq {\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( A \right)} \right)\).
-
(iv)
\(\gamma_{j}\)-open (\({\varvec{b}}_{j}\)-open), if \(A \subseteq {\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( A \right)} \right) \cup {\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( A \right)} \right)\).
-
(v)
\(\alpha_{j}\)-open if \(A \subseteq {\varvec{int}}_{{\varvec{j}}} \left[ {{\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( A \right)} \right)} \right]\).
-
(vi)
\(\beta_{j}\)-open (semi pre open), if \(A \subseteq {\varvec{cl}}_{{\varvec{j}}} \left[ {{\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( A \right)} \right)} \right]\).
The previous sets are called \(j\)-near open sets and the complement of \(j\)-near open is called \(j\)-near closed. The family of all \(j\)-near open (resp.\({ }j\)-near closed) sets of \(U\) is denoted by \(K_{j} O\left( U \right)\) (resp. \(K_{j} C\left( U \right)\)), where \(K \in \left\{ {{\mathcal{R}}^{*} , P, S, \gamma , \alpha , \beta } \right\}\).
Definition 2.8
(Amer et al. 2017) Let \(\left( {U, R,\xi_{j} } \right)\) be a \(j\)-NS, \(j \in \left\{ {r,{ }\ell ,{ }r, \ell , u, i, {\langle{u}\rangle},{\langle{i}\rangle}} \right\}\), \(k \in \left\{ {r^{*} , p, s, \gamma , \alpha , \beta } \right\}\) and \({ }A \subseteq U\). Then, the \(j\)-near (lower and upper approximations), \(j\)-near (boundary, positive and negative regions) and \(j\)-near accuracy the \(j\)-near approximations of \({ }A\) are given, respectively, by
\(\underline {R}_{j}^{k} \left( A \right) = \cup \left\{ {G \in K_{j} O\left( U \right):G \subseteq A} \right\}\),
\(\overline{R}_{j}^{k} \left( A \right) = \cap \left\{ {H \in K_{j} C\left( U \right):A \subseteq H} \right\}\),
\(B_{j}^{k} \left( A \right) = \overline{R}_{j}^{k} \left( A \right) - \underline {R}_{j}^{k} \left( A \right)\),
\(POS_{j}^{k} \left( A \right) = \underline {R}_{j}^{k} \left( A \right)\),
\(NEG_{j}^{k} \left( A \right) = U - \overline{R}_{j}^{k} \left( A \right)\), and.
\(\mu_{j}^{k} \left( A \right) = \frac{{\left| {\underline {R}_{j}^{k} \left( A \right)} \right|}}{{\left| {\overline{R}_{j}^{k} \left( A \right)} \right|}} , where \left| {\overline{R}_{j}^{k} \left( A \right)} \right| \ne 0\).
Note that, \(A\) is called a \(j\)-near exact set if \(\underline {R}_{j}^{k} \left( A \right) = \overline{R}_{j}^{k} \left( A \right) = A\). Otherwise,\({ }A{ }\) is \({\text{j}}\)-near rough.
Theorem 2.2
(Amer et al. 2017) If \(\left( {U, R,\xi_{j} } \right)\) is a \(j\)-NS. Then, for each \(k \in \left\{ {p, s, \gamma , \alpha , \beta } \right\}\), and \(k \ne r^{*} :\)
-
(i)
\(\underline {R}_{j} \left( A \right) \subseteq \underline {R}_{j}^{k} \left( A \right) \subseteq A \subseteq \overline{R}_{j}^{k} \left( A \right) \subseteq \overline{R}_{j} \left( A \right)\), \(A \subseteq U\).
-
(ii)
\(B_{j}^{k} \left( A \right) \subseteq B_{j} \left( A \right)\) and \(\mu_{j} \left( A \right) \le \mu_{j}^{k} \left( A \right)\), \(A \subseteq U\).
Proposition 2.3
(Amer et al. 2017) Let \(\left( {U, R,\xi_{j} } \right)\) be a \( j\)-NS, and \({ }A \subseteq U\). Then, the followings are held.
(i) \(\underline {R}_{j}^{\alpha } \left( A \right) \subseteq \underline {R}_{j}^{p} \left( A \right) \subseteq \underline {R}_{j}^{\gamma } \left( A \right) \subseteq \underline {R}_{j}^{\beta } \left( A \right)\) (ii) \(\underline {R}_{j}^{\alpha } \left( A \right) \subseteq \underline {R}_{j}^{s} \left( A \right) \subseteq \underline {R}_{j}^{\gamma } \left( A \right) \subseteq \underline {R}_{j}^{\beta } \left( A \right)\) (iii) \(\overline{R}_{j}^{\beta } \left( A \right) \subseteq \overline{R}_{j}^{\gamma } \left( A \right) \subseteq \overline{R}_{j}^{p} \left( A \right) \subseteq \overline{R}_{j}^{\alpha } \left( A \right)\) (iv) \(\overline{R}_{j}^{\beta } \left( A \right) \subseteq \overline{R}_{j}^{\gamma } \left( A \right) \subseteq \overline{R}_{j}^{s} \left( A \right) \subseteq \overline{R}_{j}^{\alpha } \left( A \right)\) | (v) \(\mu_{j}^{\alpha } \left( A \right) \le \mu_{j}^{p} \left( A \right) \le \mu_{j}^{\gamma } \left( A \right) \le \mu_{j}^{\beta } \left( A \right)\) (vi) \(\mu_{j}^{\alpha } \left( A \right) \le \mu_{j}^{S} \left( A \right) \le \mu_{j}^{\gamma } \left( A \right) \le \mu_{j}^{\beta } \left( A \right)\) (vii) \(B_{j}^{\beta } \left( A \right) \subseteq B_{j}^{\gamma } \left( A \right) \subseteq B_{j}^{p} \left( A \right) \subseteq B_{j}^{\alpha } \left( A \right)\) (viii) \(B_{j}^{\beta } \left( A \right) \subseteq B_{j}^{\gamma } \left( A \right) \subseteq B_{j}^{s} \left( A \right) \subseteq B_{j}^{\alpha } \left( A \right)\) |
Corollary 2.1
(Amer et al. 2017) Let \(\left( {U, R,\xi_{j} } \right)\) be a \( j\)-NS, and \( A \subseteq U\). Then, the followings are held.
-
(i)
\(A\) is \(j\)-exact \(\Rightarrow\) \(A\) is \(\alpha_{j}\)-exact \(\Rightarrow\) \(A\) is \(P_{j}\)-exact \(\Rightarrow\) \(A\) is \(\gamma_{j}\)-exact \(\Rightarrow\) \(A\) is \(\beta_{j}\)-exact.
(ii) \(A\) is \(j\)-exact \(\Rightarrow\) \(A\) is \(\alpha_{j}\)-exact \(\Rightarrow\) \(A\) is \(S_{j}\)-exact \(\Rightarrow\) \(A\) is \(\gamma_{j}\)-exact \(\Rightarrow\) \(A\) is \(\beta_{j}\)-exact.
M. Hosny (Hosny 2018) extend the above approximations into different approximations via the concepts of \(\delta \beta\)-open sets and \(\wedge_{\beta }\)-open sets as shown in the following definitions.
Definition 2.9
(Hosny 2018) If \(\left( {U, R,\xi_{j} } \right)\) is a \( j\)-NS and \(A \subseteq U\). Then:
-
(i)
The \(\delta_{j}\)-closure of \({\text{A}}\) is defined by \(cl_{j}^{\delta } \left( A \right) = \{ x \in U:A \cap {\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( A \right)} \right) \ne \emptyset , G \in \tau_{j}\) and \(x \in G\}\).
-
(ii)
A subset \(A\) is called \(\delta_{j}\)-closed set if \(A = cl_{j}^{\delta } \left( A \right)\) and the complement of \(\delta_{j}\)-closed is \(\delta_{j}\)-open.
-
(iii)
A subset \(A\) is called \(\delta \beta_{j}\)-open set if \(A \subseteq {\varvec{cl}}_{{\varvec{j}}} \left[ {{\varvec{int}}_{{\varvec{j}}} \left( {cl_{j}^{\delta } \left( A \right)} \right)} \right]\) and the complement of \(\delta \beta_{j}\)-open is \(\delta \beta_{j}\)-closed. The family of all \(\delta \beta_{j}\)-open (resp. \(\delta \beta_{j}\)-closed) sets is denoted by \(\delta \beta_{j} O\left( U \right)\) (resp. \(\delta \beta_{j} C\left( U \right)\)).
Proposition 2.4
(Hosny 2018) Every \(\beta_{j}\)-open is \(\delta \beta_{j}\)-open.
Definition 2.10
(Hosny 2018) Let \(\left( {U, R,\xi_{j} } \right)\) be a \( j\)-NS and \(A \subseteq U\). Then, the (\(\delta \beta_{j}\)-lower and \(\delta \beta_{j}\)-upper) approximations, (\(\delta \beta_{j}\)-boundary, \(\delta \beta_{j}\)-positive and \(\delta \beta_{j}\)-negative) regions and \(\delta \beta_{j}\)-accuracy of the approximations of \(A\) are given, respectively, by
\(\underline {R}_{j}^{\delta \beta } \left( A \right) = \cup \left\{ {G \in \delta \beta_{j} O\left( U \right):G \subseteq A} \right\}\),
\(\overline{R}_{j}^{\delta \beta } \left( A \right) = \cap \left\{ {H \in \delta \beta_{j} C\left( U \right):A \subseteq H} \right\}\),
\(B_{j}^{\delta \beta } \left( A \right) = \overline{R}_{j}^{\delta \beta } \left( A \right) - \underline {R}_{j}^{\delta \beta } \left( A \right)\),
\(POS_{j}^{\delta \beta } \left( A \right) = \underline {R}_{j}^{\delta \beta } \left( A \right)\),
\(NEG_{j}^{\delta \beta } \left( A \right) = U - \overline{R}_{j}^{\delta \beta } \left( A \right)\) and.
\(\mu_{j}^{\delta \beta } \left( A \right) = \frac{{\left| {\underline {R}_{j}^{\delta \beta } \left( A \right)} \right|}}{{\left| {\overline{R}_{j}^{\delta \beta } \left( A \right)} \right|}}\), where \(\left| {\overline{R}_{j}^{\delta \beta } \left( A \right)} \right| \ne \emptyset\).
Definition 2.11
(Hosny 2018) Let \(\left( {U, R,\xi_{j} } \right)\) be a \( j\)-NS, and \(A \subseteq U\). The subset \(\wedge_{{\beta_{j} }} { }\left( A \right)\) is given by \(\wedge_{{\beta_{j} }} { }\left( A \right) = \cap \left\{ {G \subseteq U:A \subseteq G,G \in \beta_{j} O\left( U \right)} \right\}\) and the subset \(A\) is said to be \(\wedge_{{\beta_{j} }}\)-set if \(A = \wedge_{{\beta_{j} }} \left( A \right)\). The complement of \(\wedge_{{\beta_{j} }}\)-set is called \(\vee_{{\beta_{j} }}\)-set. The family of all \(\wedge_{{\beta_{j} }}\)-set and \(\vee_{{\beta_{j} }}\) is denoted by \(\wedge_{{\beta_{j} }} \left( U \right)\) and \(\vee_{{\beta_{j} }} \left( U \right)\), respectively.
Proposition 2.5
(Hosny 2018) Every \(\beta_{j}\)-open is \(\wedge_{{\beta_{j} }}\)-open.
Definition 2.12
(Hosny 2018) Let \(\left( {U, R,\xi_{j} } \right)\) be a \( j\)-NS and \(A \subseteq U\). Then, the (\(\wedge_{{\beta_{j} }}\)-lower and \(\wedge_{{\beta_{j} }}\)-upper) approximations, (\(\wedge_{{\beta_{j} }}\)-boundary, \(\wedge_{{\beta_{j} }}\)-positive and \(\wedge_{{\beta_{j} }}\)-negative) regions and \(\wedge_{{\beta_{j} }}\)-accuracy of the approximations of \(A\) are given, respectively, by
\(\underline {R}_{j}^{{ \wedge_{\beta } }} \left( A \right) = \cup \left\{ {G \in \wedge_{{\beta_{j} }} \left( U \right):G \subseteq A} \right\}\),
\(\overline{R}_{j}^{{ \wedge_{\beta } }} \left( A \right) = \cap \left\{ {H \in \vee_{{\beta_{j} }} \left( U \right):A \subseteq H} \right\}\),
\(B_{j}^{{ \wedge_{\beta } }} \left( A \right) = \overline{R}_{j}^{{ \wedge_{\beta } }} \left( A \right) - \underline {R}_{j}^{{ \wedge_{\beta } }} \left( A \right)\),
\(POS_{j}^{{ \wedge_{\beta } }} \left( A \right) = \underline {R}_{j}^{{ \wedge_{\beta } }} \left( A \right)\),
\(NEG_{j}^{{ \wedge_{\beta } }} \left( A \right) = U - \overline{R}_{j}^{{ \wedge_{\beta } }} \left( A \right)\) and
\(\mu_{j}^{{ \wedge_{\beta } }} \left( A \right) = \frac{{\left| {\underline {R}_{j}^{{ \wedge_{\beta } }} \left( A \right)} \right|}}{{\left| {\overline{R}_{j}^{{ \wedge_{\beta } }} \left( A \right)} \right|}}\), where \(\left| {\overline{R}_{j}^{{ \wedge_{\beta } }} \left( A \right)} \right| \ne \emptyset\).
Proposition 2.6
(Hosny 2018) Let \(\left( {U, R,\xi_{j} } \right)\) be a \( j\)-NS, and \({ }A \subseteq U\). Then, the followings are held.
(i) \(\underline {R}_{j}^{\beta } \left( A \right) \subseteq \underline {R}_{j}^{\delta \beta } \left( A \right)\) (ii) \(\underline {R}_{j}^{\beta } \left( A \right) \subseteq \underline {R}_{j}^{{ \wedge_{\beta } }} \left( A \right)\) (iii) \(\overline{R}_{j}^{\delta \beta } \left( A \right) \subseteq \overline{R}_{j}^{\beta } \left( A \right)\) (iv)\(\overline{R}_{j}^{{ \wedge_{\beta } }} \left( A \right) \subseteq \overline{R}_{j}^{\beta } \left( A \right)\) | (v) \(\mu_{j}^{\beta } \left( A \right) \le \mu_{j}^{\delta \beta } \left( A \right)\) (vi) \(\mu_{j}^{\beta } \left( A \right) \le \mu_{j}^{{ \wedge_{\beta } }} \left( A \right)\) (vii) \(B_{j}^{\beta } \left( A \right) \subseteq B_{j}^{\delta \beta } \left( A \right)\) (viii) \(B_{j}^{\beta } \left( A \right) \subseteq B_{j}^{{ \wedge_{\beta } }} \left( A \right)\) |
Corollary 2.2
(Hosny 2018) Let \(\left( {U, R,\xi_{j} } \right)\) be a \( j\)-NS, and \( A \subseteq U\). Then, the followings are held.
-
(i)
\(A\) is \(\beta_{j}\)-exact \(\Rightarrow\) \(A\) is \(\delta \beta_{j}\)-exact.
-
(ii)
\(A\) is \(\beta_{j}\)-exact \(\Rightarrow\) \(A\) is \(\wedge_{{\beta_{j} }}\)-exact.
3 On simply open set concepts in the \(j\)-neighborhood space
In the present section, we discuss the notion of \(j\)-simply open sets in the \(j\)-NS and give some more properties of them. Relationships between the suggested sets and the other types of near open sets are examined with counterexamples.
Definition 3.1
Consider \(\left( {U, R,\xi_{j} } \right)\) be a \(j\)-NS and \(\forall j \in \left\{ {r,{ }\ell ,{ }r, \ell , u, i, {\langle{u}\rangle},{\langle{i}\rangle}} \right\}\). The set \(A \subseteq U\) is said to be \(j\)-simply open set if \({\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( A \right)} \right) \subseteq {\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( A \right)} \right)\). The complement of \(j\)-simply open is called a \(j\)-simply closed and the family of all \(j\)-simply open (resp. \(j\)-simply closed) sets of \(U\) is symbolized by \({\mathcal{S}\mathcal{M}}_{j} O\left( U \right)\) (resp. \({\mathcal{S}\mathcal{M}}_{j} C\left( U \right)\)).
Theorem 3.1
Let \(\left( {U, R,\xi_{j} } \right)\) be a \( j\)-NS. Then, the class \({\mathcal{S}\mathcal{M}}_{j} O\left( U \right)\) is a topology on \(U\).
Proof
-
(1)
Obviously, \(U\) and \(\emptyset\) are \(j\)-simply open sets.
-
(2)
Let \(\left\{ {A_{k} :k \in K } \right\} \in {\mathcal{S}\mathcal{M}}_{j} O\left( U \right)\). Then, \(\forall k \in K\), \({\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( {A_{k} } \right)} \right) \subseteq {\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( {A_{k} } \right)} \right)\) and thus \(\cup_{k} {\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( {A_{k} } \right)} \right) \subseteq \cup_{k} {\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( {A_{k} } \right)} \right)\).
But, from the properties of \({\varvec{int}}_{{\varvec{j}}}\) and \({\varvec{cl}}_{{\varvec{j}}}\), \(\cup_{k} {\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( {A_{k} } \right)} \right) = {\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( { \cup_{k} A_{k} } \right)} \right)\) and
\(\cup_{k} {\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( {A_{k} } \right)} \right) = {\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( { \cup_{k} A_{k} } \right)} \right)\). Therefore, \({\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( { \cup_{k} A_{k} } \right)} \right) \subseteq {\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( { \cup_{k} A_{k} } \right)} \right)\) and hence \(\cup_{k} A_{k}\) is \(j\)-simply open.
-
(3)
Let \(A_{1} , A_{2} \in {\mathcal{S}\mathcal{M}}_{j} O\left( U \right)\), then \({\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( {A_{1} } \right)} \right) \subseteq {\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( {A_{1} } \right)} \right)\) and \({\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( {A_{2} } \right)} \right) \subseteq {\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( {A_{2} } \right)} \right)\). But, from the properties of \({\varvec{int}}_{{\varvec{j}}}\) and \({\varvec{cl}}_{{\varvec{j}}}\), \({\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( {A_{1} \cap A_{2} } \right)} \right) \subseteq {\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( {A_{1} \cap A_{2} } \right)} \right)\). Thus \(A_{1} \cap A_{2}\) is \(j\)-simply open.
From (1), (2) and (3), \({\mathcal{S}\mathcal{M}}_{j} O\left( U \right)\) is a topology on \(U\).
Theorem 3.2
Let \(\left( {U, R,\xi_{j} } \right)\) be a \(j\)-NS. Then, every a \(j\)-simply open set is a \(j\)-simply closed set and vice versa.
Proof
Let \(A\) be a \(j\)-simply open set, then \({\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( A \right)} \right) \subseteq {\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( A \right)} \right)\). By taking the complement of the both sides, we get: \(\left[ {{\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( A \right)} \right)} \right]^{c} \supseteq \left[ {{\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( A \right)} \right)} \right]^{c}\) and this implies to \({\varvec{cl}}_{{\varvec{j}}} \left[ {\left( {{\varvec{cl}}_{{\varvec{j}}} \left( A \right)} \right)^{{\varvec{c}}} } \right] \supseteq {\varvec{int}}_{{\varvec{j}}} \left[ {\left( {{\varvec{int}}_{{\varvec{j}}} \left( A \right)} \right)^{{\varvec{c}}} } \right]\). Therefore, \({\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( {A^{c} } \right)} \right) \subseteq {\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( {A^{c} } \right)} \right)\) and \(A^{c}\) is \(j\)-simply open.
Corollary 3.1
Let \(\left( {U, R,\xi_{j} } \right)\) be a \(j\)-NS, and \(\forall j \in \left\{ {r,{ }\ell ,{ }r, \ell , u, i, {\langle{u}\rangle},{\langle{i}\rangle}} \right\}\). Then, \({\mathcal{S}\mathcal{M}}_{j} O\left( U \right) = {\mathcal{S}\mathcal{M}}_{j} C\left( U \right)\) and each of them is a quasi-discrete topology.
The fundamental aim of the following results is to show the connections between \(j\)-simply open sets and the other types of near open sets (resp. open sets).
Proposition 3.1
Let \(\left( {U, R,\xi_{j} } \right)\) be a \( j\)-NS. Every a \(j\)-semi open set is \(j\)-simply open.
Proof
Let \(A\) be a \(j\)-semi open set, then \(A \subseteq {\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( A \right)} \right)\). Thus, \({\varvec{cl}}_{{\varvec{j}}} \left( A \right) \subseteq {\varvec{cl}}_{{\varvec{j}}} \left[ {{\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( A \right)} \right)} \right]\) and this implies \({\varvec{cl}}_{{\varvec{j}}} \left( A \right) \subseteq {\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( A \right)} \right)\). Hence, \({\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( A \right)} \right) \subseteq {\varvec{int}}_{{\varvec{j}}} \left[ {{\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( A \right)} \right)} \right] \subseteq {\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( A \right)} \right)\). Therefore, \({\varvec{int}}_{{\varvec{j}}} \left( {{\varvec{cl}}_{{\varvec{j}}} \left( A \right)} \right) \subseteq {\varvec{cl}}_{{\varvec{j}}} \left( {{\varvec{int}}_{{\varvec{j}}} \left( A \right)} \right)\), and \(A\) is \(j\)-simply open.
Corollary 3.2
Let \(\left( {U, R,\xi_{j} } \right)\) be a \( j\)-NS. The following statements are true:
-
(i)
Every \(j\)-open is \(j\)-simply open.
-
(ii)
Every \(\alpha_{j}\)-open is \(j\)-simply open.
Remark 3.2
The converse of Proposition 3.1 and Corollary 3.2 need not be true in general as shown in Example 3.1.
Example 3.1
Let \(U = \left\{ {a,b,c,d,e} \right\}\) and \(R = \{ \left( {a,a} \right),\left( {a,e} \right),\left( {b,c} \right),\left( {b,d} \right),\left( {b,e} \right),\left( {c,c} \right),\left( {c,d} \right),\) \(\left( {d,c} \right),\left( {d,d} \right),\left( {e,e} \right)\}\). Then, \(N_{r} \left( a \right) = \left\{ {a,e} \right\}\), \(N_{r} \left( b \right) = \left\{ {c,d,e} \right\}\), \( N_{r} \left( c \right) = \left\{ {c,d} \right\}\), \(N_{r} \left( d \right) = \left\{ {c,d} \right\}\) and \(N_{r} \left( e \right) = \left\{ e \right\}\). Thus, the topology associated with this relation is
\(\tau_{r} = \left\{ {U,\emptyset ,\left\{ e \right\},\left\{ {a,e} \right\},\left\{ {c,d} \right\},\left\{ {c,d,e} \right\},\left\{ {a,c,d,e} \right\},\left\{ {b,c,d,e} \right\}} \right\}\) and then we obtain
\(\alpha_{r} O\left( U \right) = \left\{ {U,\emptyset ,\left\{ e \right\},\left\{ {a,e} \right\},\left\{ {c,d} \right\},\left\{ {c,d,e} \right\},\left\{ {a,c,d,e} \right\},\left\{ {b,c,d,e} \right\}} \right\}\),
\(S_{r} O\left( U \right) = \left\{ {U,\emptyset ,\left\{ e \right\},\left\{ {a,e} \right\},\left\{ {b,e} \right\},\left\{ {c,d} \right\},\left\{ {a,b,e} \right\},\left\{ {b,c,d} \right\},\left\{ {c,d,e} \right\},\left\{ {a,c,d,e} \right\},\left\{ {b,c,d,e} \right\}} \right\}\),
and \({\mathcal{S}\mathcal{M}}_{r} O\left( U \right) = \{ U,\emptyset ,\left\{ a \right\}, \left\{ b \right\},\left\{ e \right\},\left\{ {a,b} \right\},\left\{ {a,e} \right\},\left\{ {b,e} \right\},\left\{ {c,d} \right\},\left\{ {a,b,e} \right\},\left\{ {a,c,d} \right\},\left\{ {b,c,d} \right\},\)
\(\left\{ {c,d,e} \right\},\left\{ {a,b,c,d} \right\},\left\{ {a,c,d,e} \right\},\left\{ {b,c,d,e} \right\}\}\).
Obviously, \(\left\{ a \right\},\left\{ b \right\},\left\{ {a,b} \right\},\left\{ {a,c,d} \right\},\left\{ {a,b,c,d} \right\} \in {\mathcal{S}\mathcal{M}}_{r} O\left( U \right)\), but it does not belong to \(S_{r} O\left( U \right)\). Moreover, these subsets do not belong to \(\alpha_{r} O\left( U \right)\) or \(\tau_{r}\).
Remark 3.3
Let \(\left( {U, R,\xi_{j} } \right)\) be a \({ }j\)-NS and \({ }A \subseteq U\). Then, the followings are not true in general:
-
(1)
\({\mathcal{S}\mathcal{M}}_{u} O\left( U \right) \subseteq {\mathcal{S}\mathcal{M}}_{r} O\left( U \right) \subseteq {\mathcal{S}\mathcal{M}}_{i} O\left( U \right)\).
-
(2)
\({\mathcal{S}\mathcal{M}}_{u} O\left( U \right) \subseteq {\mathcal{S}\mathcal{M}}_{\ell } O\left( U \right) \subseteq {\mathcal{S}\mathcal{M}}_{i} O\left( U \right)\).
-
(3)
\({\mathcal{S}\mathcal{M}}_{\langle{u}\rangle} O\left( U \right) \subseteq {\mathcal{S}\mathcal{M}}_{\langle{r}\rangle} O\left( U \right) \subseteq {\mathcal{S}\mathcal{M}}_{\langle{i}\rangle} O\left( U \right)\).
-
(4)
\({\mathcal{S}\mathcal{M}}_{\langle{u}\rangle} O\left( U \right) \subseteq {\mathcal{S}\mathcal{M}}_{\langle{\ell }\rangle} O\left( U \right) \subseteq {\mathcal{S}\mathcal{M}}_{\langle{i}\rangle} O\left( U \right)\).
-
(5)
\({\mathcal{S}\mathcal{M}}_{r} O\left( U \right)\) is the dual of \({\mathcal{S}\mathcal{M}}_{\ell } O\left( U \right)\).
-
(6)
\({\mathcal{S}\mathcal{M}}_{\langle{r}\rangle} O\left( U \right)\) is the dual of \({\mathcal{S}\mathcal{M}}_{\langle{\ell }\rangle} O\left( U \right)\).
So, the different types of \(j\)-simply open sets are independent and then the relationships among them differ than the relationships among different types of \(\tau_{j}\).
To illustrate Remark 3.3, we give the following example.
Example 3.2
Consider Example 3.1, the \(j\)-neighborhoods of each element in \(U\) are given in Table 1:
From Table 1, we get the following topologies \( \tau_{j}\):
\(\tau_{r} = \left\{ {U,\emptyset ,\left\{ e \right\},\left\{ {a,e} \right\},\left\{ {c,d} \right\},\left\{ {c,d,e} \right\},\left\{ {a,c,d,e} \right\},\left\{ {b,c,d,e} \right\}} \right\} \) and
\(\Gamma_{r} = \left\{ {U,\emptyset ,\left\{ a \right\},\left\{ b \right\},\left\{ {a,b} \right\},\left\{ {a,b,e} \right\},\left\{ {b,c,d} \right\},\{ a,b,c,d} \right\}\}\).
\(\tau_{\ell } = \left\{ {U,\emptyset ,\left\{ a \right\},\left\{ b \right\},\left\{ {a,b} \right\},\left\{ {a,b,e} \right\},\left\{ {b,c,d} \right\},\{ a,b,c,d} \right\}\}\) and
\(\Gamma_{\ell } = \left\{ {U,\emptyset ,\left\{ e \right\},\left\{ {a,e} \right\},\left\{ {c,d} \right\},\left\{ {c,d,e} \right\},\left\{ {a,c,d,e} \right\},\left\{ {b,c,d,e} \right\}} \right\}\).
\(\tau_{i} = \{ U,\emptyset ,\left\{ a \right\},\left\{ b \right\},\left\{ e \right\},\left\{ {a,b} \right\},\left\{ {a,e} \right\},\left\{ {b,e} \right\},\left\{ {c,d} \right\},\left\{ {a,b,e} \right\},\left\{ {a,c,d} \right\},\left\{ {b,c,d} \right\},\left\{ {c,d,e} \right\},\left\{ {a,b,c,d} \right\},\) \(\left\{ {a,c,d,e} \right\},\) \(\left\{ {b,c,d,e} \right\}\} = \Gamma_{i}\). \(\tau_{u} = \left\{ {U,\emptyset } \right\} = \Gamma_{u}\).
\(\tau_{\langle{r}\rangle} = \{ U,\emptyset ,\left\{ b \right\},\left\{ e \right\},\left\{ {a,e} \right\},\left\{ {b,e} \right\},\left\{ {c,d} \right\},\left\{ {a,b,e} \right\},\left\{ {b,c,d} \right\},\left\{ {c,d,e} \right\},\left\{ {a,c,d,e} \right\},\) \(\left\{ {b,c,d,e} \right\}\}\) and
\(\Gamma_{\langle{r}\rangle} = \left\{ {U,\emptyset ,\left\{ a \right\},\left\{ b \right\},\left\{ {a,b} \right\},\left\{ {a,e} \right\},\left\{ {c,d} \right\},\left\{ {a,b,e} \right\},\left\{ {a,c,d} \right\},\left\{ {b,c,d} \right\},\left\{ {a,b,c,d} \right\}, \left\{ {a,c,d,e} \right\}} \right\}\).
\(\tau_{\langle{\ell }\rangle} = \left\{ {U,\emptyset ,\left\{ a \right\},\left\{ b \right\},\left\{ {a,b} \right\},\left\{ {a,b,e} \right\},\left\{ {b,c,d} \right\},\{ a,b,c,d} \right\}\}\) and
\(\Gamma_{\langle{\ell }\rangle} = \left\{ {U,\emptyset ,\left\{ e \right\},\left\{ {a,e} \right\},\left\{ {c,d} \right\},\left\{ {c,d,e} \right\},\left\{ {a,c,d,e} \right\},\left\{ {b,c,d,e} \right\}} \right\}\).
\(\tau_{\langle{i}\rangle} = \{ U,\emptyset ,\left\{ b \right\},\left\{ e \right\},\left\{ {a,e} \right\},\left\{ {b,e} \right\},\left\{ {c,d} \right\},\left\{ {a,b,e} \right\},\left\{ {b,c,d} \right\},\left\{ {c,d,e} \right\},\left\{ {a,c,d,e} \right\},\) \(\left\{ {b,c,d,e} \right\}\}\) and
\(\Gamma_{\langle{i}\rangle} = \left\{ {U,\emptyset ,\left\{ a \right\},\left\{ b \right\},\left\{ {a,b} \right\},\left\{ {a,e} \right\},\left\{ {c,d} \right\},\left\{ {a,b,e} \right\},\left\{ {a,c,d} \right\},\left\{ {b,c,d} \right\},\left\{ {a,b,c,d} \right\}, \left\{ {a,c,d,e} \right\}} \right\}\).
\(\tau_{\langle{u}\rangle} = \left\{ {U,\emptyset ,\left\{ b \right\},\left\{ {a,b,e} \right\},\left\{ {b,c,d} \right\}} \right\}\) and \(\Gamma_{\langle{u}\rangle} = \left\{ {U,\emptyset ,\left\{ {a,e} \right\},\left\{ {c,d} \right\},\left\{ {a,c,d,e} \right\}} \right\}\).
Thus, we obtain the families of all \(j\)-simply open sets as follows:
\({\mathcal{S}\mathcal{M}}_{r} O\left( U \right) = \{ U,\emptyset ,\left\{ a \right\},\left\{ b \right\},\left\{ e \right\},\left\{ {a,b} \right\},\left\{ {a,e} \right\},\left\{ {b,e} \right\},\left\{ {c,d} \right\},\left\{ {a,b,e} \right\},\left\{ {a,c,d} \right\},\left\{ {b,c,d} \right\},\left\{ {c,d,e} \right\},\) \(\left\{ {b,c,d,e} \right\},\left\{ {a,b,c,d} \right\}, \left\{ {a,c,d,e} \right\}\}\), \({\mathcal{S}\mathcal{M}}_{\ell } O\left( U \right) = P\left( U \right)\), \({\mathcal{S}\mathcal{M}}_{u} O\left( U \right) = \left\{ {U,\emptyset } \right\}\),
\({\mathcal{S}\mathcal{M}}_{i} O\left( U \right) = \{ U,\emptyset ,\left\{ a \right\},\left\{ b \right\},\left\{ e \right\},\left\{ {a,b} \right\},\left\{ {a,e} \right\},\left\{ {b,e} \right\},\left\{ {c,d} \right\},\left\{ {a,b,e} \right\},\left\{ {a,c,d} \right\},\left\{ {b,c,d} \right\},\left\{ {c,d,e} \right\},\) \(\left\{ {b,c,d,e} \right\},\left\{ {a,b,c,d} \right\}, \left\{ {a,c,d,e} \right\}\}\),
\({\mathcal{S}\mathcal{M}}_{\langle{r}\rangle} O\left( U \right) = \{ U,\emptyset ,\left\{ a \right\},\left\{ b \right\},\left\{ e \right\},\left\{ {a,b} \right\},\left\{ {a,e} \right\},\left\{ {b,e} \right\},\left\{ {c,d} \right\},\left\{ {a,b,e} \right\},\left\{ {a,c,d} \right\},\left\{ {b,c,d} \right\},\left\{ {c,d,e} \right\},\) \(\left\{ {a,c,d,e} \right\},\left\{ {b,c,d,e} \right\}\}\), and \({\mathcal{S}\mathcal{M}}_{\langle{\ell }\rangle} O\left( U \right) = {\mathcal{S}\mathcal{M}}_{\langle{i}\rangle} O\left( U \right) = {\mathcal{S}\mathcal{M}}_{\langle{u}\rangle} O\left( U \right) = {\mathcal{P}}\left( U \right)\).
It is clear that:
-
(1)
\({\mathcal{S}\mathcal{M}}_{\ell } O\left( U \right){ \varsubsetneq \mathcal{S}\mathcal{M}}_{i} O\left( U \right)\),
-
(2)
\({\mathcal{S}\mathcal{M}}_{\langle{u}\rangle} O\left( U \right){ \varsubsetneq \mathcal{S}\mathcal{M}}_{\langle{r}\rangle} O\left( U \right)\),
-
(3)
\({\mathcal{S}\mathcal{M}}_{r} O\left( U \right)\) is not the dual of \({\mathcal{S}\mathcal{M}}_{\ell } O\left( U \right)\).
-
(4)
\({\mathcal{S}\mathcal{M}}_{\langle{r}\rangle} O\left( U \right)\) is not the dual of \({\mathcal{S}\mathcal{M}}_{\langle{\ell }\rangle} O\left( U \right)\).
Similarly, one can give another example to illustrate the others statements of Remark 3.3.
Note that: The classes of \(j\)-simply open sets and \(P_{j}\)-open (resp. \(\gamma_{j}\)-open, \(\beta_{j}\)-open, \(\delta \beta_{j}\)-open and \(\wedge_{{\beta_{j} }}\)-sets) sets are independent, that is \({\mathcal{S}\mathcal{M}}_{j} O\left( U \right)\) and \(P_{j} O\left( U \right)\) (resp. \(\gamma_{j} O\left( U \right)\), \(\beta_{j} O\left( U \right)\), \(\delta \beta_{j} O\left( U \right)\) and \(\wedge_{{\beta_{j} }} \left( U \right)\)) are independent (non-comparable) generally as shown in Example 3.3.
Example 3.3
According to Example 3.1, we obtain the following near open sets:
\({\mathcal{S}\mathcal{M}}_{r} O\left( U \right) = \{ U,\emptyset ,\left\{ a \right\},\left\{ b \right\},\left\{ e \right\},\left\{ {a,b} \right\},\left\{ {a,e} \right\},\left\{ {b,e} \right\},\left\{ {c,d} \right\},\left\{ {a,b,e} \right\},\left\{ {a,c,d} \right\},\left\{ {b,c,d} \right\},\left\{ {c,d,e} \right\},\) \(\left\{ {a,b,c,d} \right\}, \left\{ {a,c,d,e} \right\},\left\{ {b,c,d,e} \right\}\}\),
\(P_{r} O\left( U \right) = \{ U,\emptyset ,\left\{ c \right\},\left\{ d \right\},\left\{ e \right\},\left\{ {a,e} \right\},\left\{ {c,d} \right\},\left\{ {c,e} \right\},\left\{ {d,e} \right\},\left\{ {a,c,e} \right\},\left\{ {a,d,e} \right\},\left\{ {b,c,e} \right\},\left\{ {c,d,e} \right\},\) \(\left\{ {a,b,c,e} \right\}, \left\{ {a,b,d,e} \right\},\left\{ {a,c,d,e} \right\},\left\{ {b,c,d,e} \right\}\}\),
\(\gamma_{r} O\left( U \right) = \{ U,\emptyset ,\left\{ c \right\},\left\{ d \right\},\left\{ e \right\},\left\{ {a,e} \right\},\left\{ {b,e} \right\},\left\{ {c,d} \right\},\left\{ {c,e} \right\},\left\{ {d,e} \right\},\left\{ {a,b,e} \right\},\left\{ {a,c,e} \right\},\left\{ {a,d,e} \right\},\left\{ {b,c,d} \right\},\) \(\left\{ {b,c,e} \right\},\left\{ {b,d,e} \right\},\left\{ {c,d,e} \right\},\left\{ {a,b,c,e} \right\}, \left\{ {a,b,d,e} \right\},\left\{ {a,c,d,e} \right\},\left\{ {b,c,d,e} \right\}\}\),
\(\beta_{r} O\left( U \right) = \{ U,\emptyset ,\left\{ c \right\},\left\{ d \right\},\left\{ e \right\},\left\{ {a,e} \right\},\left\{ {b,c} \right\},\left\{ {b,d} \right\},\left\{ {b,e} \right\},\left\{ {c,d} \right\},\left\{ {c,e} \right\},\left\{ {d,e} \right\},\left\{ {a,b,e} \right\},\left\{ {a,c,e} \right\},\) \(\left\{ {a,d,e} \right\},\left\{ {b,c,d} \right\},\left\{ {b,c,e} \right\},\left\{ {b,d,e} \right\},\left\{ {c,d,e} \right\},\left\{ {a,b,c,e} \right\},\left\{ {a,b,d,e} \right\},\left\{ {a,c,d,e} \right\},\left\{ {b,c,d,e} \right\}\) ,
\(\wedge_{{\beta_{j} }} \left( U \right) = \{ U,\emptyset ,\left\{ b \right\}, \left\{ c \right\},\left\{ d \right\},\left\{ e \right\},\left\{ {a,e} \right\},\left\{ {b,c} \right\},\left\{ {b,d} \right\},\left\{ {b,e} \right\},\left\{ {c,d} \right\},\left\{ {c,e} \right\},\left\{ {d,e} \right\},\left\{ {a,b,e} \right\},\) \(\left\{ {a,c,e} \right\},\left\{ {a,d,e} \right\},\left\{ {b,c,d} \right\},\left\{ {b,c,e} \right\},\left\{ {b,d,e} \right\},\left\{ {c,d,e} \right\},\left\{ {a,b,c,e} \right\},\left\{ {a,b,d,e} \right\},\left\{ {a,c,d,e} \right\},\) \(\left\{ {b,c,d,e} \right\}\}\) and \(\delta \beta_{r} O\left( U \right) = {\mathcal{P}}\left( U \right) - \left\{ b \right\}\).
Remark 3.5
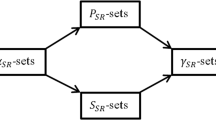
According to Proposition 3.1, Corollary 3.2, and the results in (El-Atik 1997; El-Bably 2015a, b; Hosny 2018; Amer et al. 2017), the relationships among different types of near open sets and \(j\)-simply open set are given by Fig. 1 (where the arrow \(\to\) means \( \subseteq\)).

Relationships among different types of j-near open sets
4 Three methods to generalized rough sets based on simply open sets
The central objective of the current article is to present three different methods for generalizing Pawlak rough set approximations and some of its generalizations like Abd El-Monsef et al. (Abd El-Monsef et al. 2014a), Y. Yao (Yao 1996), W. S. Amer et al. (Amer et al. 2017), and M. Hosny (Hosny 2018). Many comparisons among the current methods and the others methods are investigated. Several results are proposed to show that the suggested methods are stronger and accurate than the other methods.
4.1 First method to rough set approximations
Definition 4.1
If \(\left( {U, R,\xi_{j} } \right)\) is a \(j\)-NS, then the \({ }j\)-simply (lower and upper) approximations, \(j\)-simply (boundary, positive and negative) regions and \(j\)-simply accuracy of the \(j\)-simply approximations of \({ }A \subseteq U\) are given, respectively, by
\(\underline {R}_{j}^{sm} \left( A \right) = \cup \left\{ {G \in {\mathcal{S}\mathcal{M}}_{j} O\left( U \right):G \subseteq A} \right\}\),
\(\overline{R}_{j}^{sm} \left( A \right) = \cap \left\{ {H \in {\mathcal{S}\mathcal{M}}_{j} O\left( U \right):A \subseteq H} \right\}\),
\(B_{j}^{sm} \left( A \right) = \overline{R}_{j}^{sm} \left( A \right) - \underline {R}_{j}^{sm} \left( A \right)\),
\(POS_{j}^{sm} \left( A \right) = \underline {R}_{j}^{sm} \left( A \right)\),
\(NEG_{j}^{sm} \left( A \right) = U - \overline{R}_{j}^{sm} \left( A \right)\), and
\(\mu_{j}^{sm} \left( A \right) = \frac{{\left| {\underline {R}_{j}^{sm} \left( A \right)} \right|}}{{\left| {\overline{R}_{j}^{sm} \left( A \right)} \right|}} , where \left| {\overline{R}_{j}^{sm} \left( A \right)} \right| \ne 0\).
Note that: \(A\) is called a \(j\)-simply exact set if \(\underline {R}_{j}^{sm} \left( A \right) = \overline{R}_{j}^{sm} \left( A \right) = A\). Otherwise,\( A \) is \(j\)-simply rough. Obviously, \(A\) is \( j\)-simply exact if \( \mu_{j}^{sm} \left( A \right) = 1\) and \(B_{j}^{sm} \left( A \right) = \emptyset \). Otherwise, it is \(j\)-simply rough.
The core aim of the next consequences is to show the connections between \({\text{j}}\)-simply approximations and some of the other types.
Theorem 4.1
Let \(\left( {U, R,\xi_{j} } \right)\) be a \(j\)-NS, and \( A \subseteq U\). Then,
(i) \(\underline {R}_{j} \left( A \right) \subseteq \underline {R}_{j}^{sm} \left( A \right)\) (ii) \(\overline{R}_{j}^{sm} \left( A \right) \subseteq \overline{R}_{j} \left( A \right)\) | (iii) \(B_{j}^{sm} \left( A \right) \subseteq B_{j} \left( A \right)\) (iv) \(\mu_{j} \left( A \right) \le \mu_{j}^{sm} \left( A \right)\) |
Proof
We only verify (i), the other items can be made likewise.
Let \(x \in \underline {R}_{j} \left( A \right)\), then \(\exists G \in \tau_{j}\) such that \(G \subseteq A\) and \({ }x \in G\). But, from Corollary 3.2, every \(j\)-open set is \(j\)-simply open, hence \(G\) is \(j\)-simply open and \(G \in {\mathcal{S}\mathcal{M}}_{j} O\left( U \right)\) such that \(G \subseteq A\) and \({ }x \in G\). Therefore, \(x \in \underline {R}_{j}^{sm} \left( A \right)\).
Theorem 4.2
Let \(\left( {U, R,\xi_{j} } \right)\) be a \(j\)-NS. Then, \(\forall A \subseteq U\):
(i) \(\underline {R}_{j}^{\alpha } \left( A \right) \subseteq \underline {R}_{j}^{s} \left( A \right) \subseteq \underline {R}_{j}^{sm} \left( A \right)\) (ii) \(\overline{R}_{j}^{sm} \left( A \right) \subseteq \overline{R}_{j}^{s} \left( A \right) \subseteq \overline{R}_{j}^{\alpha } \left( A \right)\) | (iii) \(B_{j}^{sm} \left( A \right) \subseteq B_{j}^{s} \left( A \right) \subseteq B_{j}^{\alpha } \left( A \right)\) (iv) \(\mu_{j}^{\alpha } \left( A \right) \le \mu_{j}^{s} \left( A \right) \le \mu_{j}^{sm} \left( A \right)\) |
Proof
By using Proposition 3.1 and Corollary 3.2, every \(j\)-semi and \(\alpha_{j}\)-open set is \(j\)-simply open. Thus, the proof directly by the same manner as Theorem 4.1.
Corollary 4.1
Let \(\left( {U,{ }R,\xi_{j} } \right)\) be a \(j\)-NS, and \(A \subseteq U\). Then,
\(A\) is \(j\)-exact \(\Rightarrow\) \(A\) is \(\alpha_{j}\)-exact \(\Rightarrow A\) is \(s_{j}\)-exact \(\Rightarrow\) \(A\) is \(j\)-simply exact.
Remark 4.1
The opposite of the previous consequences is not correct in overall as exposed in Example 4.1.
Basic properties of \(j\)-simply approximations are given in the following proposition.
Proposition 4.1
If \(\left( {U, R,\xi_{j} } \right)\) is a \(j\)-NS and \(X,Y \subseteq U\). Then:
(L1) \(\underline {R}_{j}^{sm} \left( X \right) \subseteq X\) (L2) \(\underline {R}_{j}^{sm} \left( \emptyset \right) = \emptyset\) (L3) \(\underline {R}_{j}^{sm} \left( U \right) = U\) (L4) \(\underline {R}_{j}^{sm} \left( {X \cap Y} \right) = \underline {R}_{j}^{sm} \left( X \right) \cap \underline {R}_{j}^{sm} \left( Y \right)\) (L5) If \(X \subseteq Y,\) then \(\underline {R}_{j}^{sm} \left( X \right) \subseteq \underline {R}_{j}^{sm} \left( Y \right)\) (L6) \(\underline {R}_{j}^{sm} \left( X \right) \cup \underline {R}_{j}^{sm} \left( Y \right) \subseteq \underline {R}_{j}^{sm} \left( {X \cup Y} \right)\) (L7)\(\underline {R}_{j}^{sm} \left( {X^{c} } \right) = (\overline{R}_{j}^{sm} \left( X \right))^{c}\) (L8)\(\underline {R}_{j}^{sm} \left( {\underline {R}_{j}^{sm} \left( X \right)} \right) = \underline {R}_{j}^{sm} \left( X \right)\) (L9)\(\underline {R}_{j}^{sm} \left( {(\underline {R}_{j}^{sm} \left( X \right))^{c} } \right) = (\underline {R}_{j}^{sm} \left( X \right))^{c}\) (L10) \(\underline {R}_{j}^{sm} \left( X \right) = \overline{R}_{j}^{sm} \left( {\underline {R}_{j}^{sm} \left( X \right)} \right)\) (L11) \(\forall X \in {\mathcal{S}\mathcal{M}}_{j} O\left( U \right) \Rightarrow \underline {R}_{j}^{sm} \left( X \right) = X\) | (U1) \(X \subseteq \overline{R}_{j}^{sm} \left( X \right)\) (U2) \(\overline{R}_{j}^{sm} \left( \emptyset \right) = \emptyset\) (U3) \(\overline{R}_{j}^{sm} \left( U \right) = U\) (U4) \(\overline{R}_{j}^{sm} \left( {X \cup Y} \right) = \overline{R}_{j}^{sm} \left( X \right) \cup \overline{R}_{j}^{sm} \left( Y \right)\) (U5) If \(X \subseteq Y,\) then \(\overline{R}_{j}^{sm} \left( X \right) \subseteq \overline{R}_{j}^{sm} \left( Y \right)\) (U6) \(\overline{R}_{j}^{sm} \left( X \right) \cap \overline{R}_{j}^{sm} \left( Y \right) \supseteq \overline{R}_{j}^{sm} \left( {X \cap Y} \right)\) (U7) \(\overline{R}_{j}^{sm} \left( {X^{c} } \right) = (\underline {R}_{j}^{sm} \left( X \right))^{c}\) (U8) \(\overline{R}_{j}^{sm} \left( {\overline{R}_{j}^{sm} \left( X \right)} \right) = \overline{R}_{j}^{sm} \left( X \right)\) (U9) \(\overline{R}_{j}^{sm} \left( {(\overline{R}_{j}^{sm} \left( X \right))^{c} } \right) = (\overline{R}_{j}^{sm} \left( X \right))^{c}\) (U10) \(\overline{R}_{j}^{sm} \left( X \right) = \underline {R}_{j}^{sm} \left( {\overline{R}_{j}^{sm} \left( X \right)} \right)\) (U11) \({ }\forall X \in {\mathcal{S}\mathcal{M}}_{j} O\left( U \right) \Rightarrow \overline{R}_{j}^{sm} \left( X \right) = X\) |
Proof
From Theorem 3.1 and Corollary 3.1, the class \({\mathcal{S}\mathcal{M}}_{{\text{j}}} {\text{O}}\left( {\text{U}} \right)\) represents a quasi-discrete topology. Then, \(\underline {R}_{j}^{sm} \left( X \right)\) and \(\overline{R}_{j}^{sm} \left( X \right)\) represent the interior and closure operators of \(X\). Thus, the properties (L1-L11) and (U1-U11) are held.
Remark 4.2
Proposition 4.1 illustrates that the \({\text{j}}\)-simply approximations satisfied all of the characteristics of Pawlak’s rough approximations without any restrictions. Therefore, we can say that the proposed methodologies in Definition 4.1 represent the natural generalization to Pawlak’s model and some of its generalizations.
The next example explains this remark.
Example 4.1
(Continued for Example 3.1), the topology produced by right neighborhoods is
\(\tau_{r} = \left\{ {U,\emptyset ,\left\{ e \right\},\left\{ {a,e} \right\},\left\{ {c,d} \right\},\left\{ {c,d,e} \right\},\left\{ {a,c,d,e} \right\},\left\{ {b,c,d,e} \right\}} \right\}\),
and the family of all \({\text{r}}\)-simply open sets is
\(\left\{ {c,d,e} \right\},\left\{ {a,b,c,d} \right\},\left\{ {a,c,d,e} \right\},\left\{ {b,c,d,e} \right\}\}\).
Now, we calculate the boundary region and accuracy of approximations by using Y. Yao technique in Definition 2.2, Abd El-Monsef in Definition 2.6 technique and the present technique in Definition 4.1 as shown in Table 2.
4.2 Second method to rough set approximations
Definition
4.2 If \(\left( {U, R,\xi_{j} } \right)\) is a \(j\)-NS. Then, the \({ }j\)-generalized (lower and upper) approximations, (boundary, positive and negative) regions and the \({ }j\)-generalized accuracy of the \(j\)-generalized approximations of \({ }A \subseteq U\) are given, respectively, by
\({\mathbb{L}}_{j}^{1} \left( A \right) = \underline {R}_{j}^{sm} \left( A \right) \cup \underline {R}_{j}^{\delta \beta } \left( A \right)\),
\({\mathbb{U}}_{j}^{1} \left( A \right) = \overline{R}_{j}^{sm} \left( A \right) \cap \overline{R}_{j}^{\delta \beta } \left( A \right)\),
\({{\mathbb{B}}{\mathbb{N}}{\mathbb{D}}}_{j}^{1} \left( A \right) = {\mathbb{U}}_{j}^{1} \left( A \right) - {\mathbb{L}}_{j}^{1} \left( A \right)\),
\({{\mathbb{P}}{\mathbb{O}}{\mathbb{S}}}_{j}^{1} \left( A \right) = {\mathbb{L}}_{j}^{1} \left( A \right)\),
\({{\mathbb{N}}{\mathbb{E}}{\mathbb{G}}}_{j}^{1} \left( A \right) = U - {\mathbb{U}}_{j}^{1} \left( A \right)\) and
\(\mu_{j}^{1} \left( A \right) = \frac{{\left| {{\mathbb{L}}_{j}^{1} \left( A \right)} \right|}}{{\left| {{\mathbb{U}}_{j}^{1} \left( A \right)} \right|}}\), where \(\left| {{\mathbb{U}}_{j}^{1} \left( A \right)} \right| \ne 0\).
Note that: \(A\) is called a \(j\)-generalized exact set if \({\mathbb{L}}_{j}^{1} \left( A \right) = {\mathbb{U}}_{j}^{1} \left( A \right) = A\). Otherwise,\( A \) is \(j\)-generalized rough. Obviously, \(A\) is \(j\)-generalized exact if \(\mu_{j}^{1} \left( A \right) = 1\) and \({{\mathbb{B}}{\mathbb{N}}{\mathbb{D}}}_{j}^{1} \left( A \right) = \emptyset \). Otherwise, it is \(j\)-generalized rough.
From Definition 4.2 and Theorem 4.1, it is easy to demonstrate the next consequences, so we omit the proof.
Theorem 4.3
4.3 Let \(\left( {U, R,\xi_{j} } \right)\) be a \(j\)-NS, and \({ }A \subseteq U\). Then:
(i) \(\underline {R}_{j}^{sm} \left( A \right) \subseteq {\mathbb{L}}_{j}^{1} \left( A \right)\) (ii) \(\underline {R}_{j}^{\delta \beta } \left( A \right) \subseteq {\mathbb{L}}_{j}^{1} \left( A \right)\) (iii) \(\underline {R}_{j} \left( A \right) \subseteq {\mathbb{L}}_{j}^{1} \left( A \right)\) | (iv) \({\mathbb{U}}_{j}^{1} \left( A \right) \subseteq \overline{R}_{j}^{sm} \left( A \right)\) (v) \({\mathbb{U}}_{j}^{1} \left( A \right) \subseteq \overline{R}_{j}^{\delta \beta } \left( A \right)\) (vi) \({\mathbb{U}}_{j}^{1} \left( A \right) \subseteq \overline{R}_{j} \left( A \right)\) |
Corollary
4.2 Let \(\left( {U,{ }R,\xi_{j} } \right)\) be a \(j\)-NS, and \( A \subseteq U\). Then,
(i) \({{\mathbb{B}}{\mathbb{N}}{\mathbb{D}}}_{j}^{1} \left( A \right) \subseteq B_{j}^{sm} \left( A \right)\) (ii) \({{\mathbb{B}}{\mathbb{N}}{\mathbb{D}}}_{j}^{1} \left( A \right) \subseteq B_{j}^{\delta \beta } \left( A \right)\) (iii) \({{\mathbb{B}}{\mathbb{N}}{\mathbb{D}}}_{j}^{1} \left( A \right) \subseteq B_{j} \left( A \right)\) | (iv) \(\mu_{j}^{sm} \left( A \right) \le \mu_{j}^{1} \left( A \right)\) (v) \(\mu_{j}^{\delta \beta } \left( A \right) \le \mu_{j}^{1} \left( A \right)\) (vi) \(\mu_{j} \left( A \right) \le \mu_{j}^{1} \left( A \right)\) |
Corollary
4.3 Let \(\left( {U,{ }R,\xi_{j} } \right)\) be a \(j\)-NS, and \({\text{A}} \subseteq {\text{U}}\). Then, the following statements are true in general:
-
(i)
\(A\) is \(j\)-exact \(\Rightarrow\) \(A\) is \(j\)-simply exact \(\Rightarrow\) \(A\) is \({{ j}}\)-generalized exact.
-
(ii)
\(A\) is \(j\)-exact \(\Rightarrow\) \(A\) is \(\delta \beta_{j}\)-exact \(\Rightarrow\) \(A\) is \({ j}\)-generalized exact.
Remark 4.3
The reverse of the previous results is not correct in overall as shown in Example 4.2.
Example 4.2
Consider Example 4.1, the class of all \(\delta \beta_{r}\)-open and \(\delta \beta_{r}\)-closed sets are
\(\delta \beta_{r} O\left( U \right) = {\mathcal{P}}\left( U \right) - \left\{ b \right\}\) and \(\delta \beta_{r} C\left( U \right) = {\mathcal{P}}\left( U \right) - \left\{ {a,c,d} \right\}\).
Thus, we calculate the boundary region and the accuracy of the approximations by using M. Hosny technique in Definition 2.10 and the existing technique in Definitions 4.1 and 4.3 as Table 3 illustrates.
4.3 Third method to rough set approximations
Definition 4.3
If \(\left( {U, R,\xi_{j} } \right)\) is a \(j\)-NS. Then, the \({ } j\)-generalized (lower and upper) approximations, \(j\)-generalized (boundary, positive and negative) regions and the \({ }j\)-generalized accuracy of the approximations of \({ }A \subseteq U\) are given, respectively, by
\({\mathbb{L}}_{j}^{2} \left( A \right) = \underline {R}_{j}^{sm} \left( A \right) \cup \underline {R}_{j}^{{ \wedge_{\beta } }} \left( A \right)\),
\({\mathbb{U}}_{j}^{2} \left( A \right) = \overline{R}_{j}^{sm} \left( A \right) \cap \overline{R}_{j}^{{ \wedge_{\beta } }} \left( A \right)\),
\({{\mathbb{B}}{\mathbb{N}}{\mathbb{D}}}_{j}^{2} \left( A \right) = {\mathbb{U}}_{j}^{2} \left( A \right) - {\mathbb{L}}_{j}^{2} \left( A \right)\),
\({{\mathbb{P}}{\mathbb{O}}{\mathbb{S}}}_{j}^{2} \left( A \right) = {\mathbb{L}}_{j}^{2} \left( A \right)\),
\({{\mathbb{N}}{\mathbb{E}}{\mathbb{G}}}_{j}^{2} \left( A \right) = U - {\mathbb{U}}_{j}^{2} \left( A \right)\) and
\(\mu_{j}^{2} \left( A \right) = \frac{{\left| {{\mathbb{L}}_{j}^{2} \left( A \right)} \right|}}{{\left| {{\mathbb{U}}_{j}^{2} \left( A \right)} \right|}}\), where \(\left| {{\mathbb{U}}_{j}^{2} \left( A \right)} \right| \ne 0\).
Note that, \(A\) is called a \(j\)-generalized exact set if \({\mathbb{L}}_{j}^{2} \left( A \right) = {\mathbb{U}}_{j}^{2} \left( A \right) = A\). Otherwise,\( A \) is \(j\)-generalized rough. Obviously, \(A\) is \(j\)-generalized exact if \(\mu_{j}^{2} \left( A \right) = 1\) and \({{\mathbb{B}}{\mathbb{N}}{\mathbb{D}}}_{j}^{2} \left( A \right) = \emptyset\). Otherwise, it is \(j\)-generalized rough.
From Definition 4.3 and Theorem 4.1, it is easy to demonstrate the next consequences, so we omit the proof.
Theorem 4.4
4.4 Let \(\left( {U,{ }R,\xi_{j} } \right)\) be a \(j\)-NS, and \( A \subseteq U\). Then:
(i) \(\underline {R}_{j}^{sm} \left( A \right) \subseteq {\mathbb{L}}_{j}^{2} \left( A \right)\) (ii) \(\underline {R}_{j}^{{ \wedge_{\beta } }} \left( A \right) \subseteq {\mathbb{L}}_{j}^{2} \left( A \right)\) (iii) \(\underline {R}_{j} \left( A \right) \subseteq {\mathbb{L}}_{j}^{2} \left( A \right)\) | (iv) \({\mathbb{U}}_{j}^{2} \left( A \right) \subseteq \overline{R}_{j}^{sm} \left( A \right)\) (v) \({\mathbb{U}}_{j}^{2} \left( A \right) \subseteq \overline{R}_{j}^{{ \wedge_{\beta } }} \left( A \right)\) (vi) \({\mathbb{U}}_{j}^{2} \left( A \right) \subseteq \overline{R}_{j} \left( A \right)\) |
Corollary 4.4
Let \(\left( {U,{ }R,\xi_{j} } \right)\) be a \(j\)-NS, and \( A \subseteq U\). Then,
(i) \({{\mathbb{B}}{\mathbb{N}}{\mathbb{D}}}_{j}^{2} \left( A \right) \subseteq B_{j}^{sm} \left( A \right)\) (ii) \({{\mathbb{B}}{\mathbb{N}}{\mathbb{D}}}_{j}^{2} \left( A \right) \subseteq B_{j}^{{ \wedge_{\beta } }} \left( A \right)\) (iii) \({{\mathbb{B}}{\mathbb{N}}{\mathbb{D}}}_{j}^{2} \left( A \right) \subseteq B_{j} \left( A \right)\) | (iv) \(\mu_{j}^{sm} \left( A \right) \le \mu_{j}^{2} \left( A \right)\) (v) \(\mu_{j}^{{ \wedge_{\beta } }} \left( A \right) \le \mu_{j}^{2} \left( A \right)\) (vi) \(\mu_{j} \left( A \right) \le \mu_{j}^{2} \left( A \right)\) |
Corollary 4.5
Let \(\left( {U, R,\xi_{j} } \right)\) be a \(j\)-NS and \(A \subseteq U\). Then, the following statements are true in general.
-
(i)
\(A\) is \(j\)-exact \(\Rightarrow\) \(A\) is \(j\)-simply exact \(\Rightarrow\) \(A\) is \({ }j\)-generalized exact.
-
(ii)
\(A\) is \(j\)-exact \(\Rightarrow\) \(A\) is \(\wedge_{{\beta_{j} }}\)-exact \(\Rightarrow\) \(A\) is \({ }j\)-generalized exact.
Remark 4.4
The reverse of the previous consequences is not right in overall as exposed in Example 4.3.
Example 4.3
According to Example 4.1, the class of all \(\wedge_{{\beta_{r} }}\)-open and \(\vee_{{\beta_{r} }}\)-closed sets are given, respectively, by
\(\wedge_{{\beta_{r} }} \left( U \right) = \{ U,\emptyset ,\left\{ b \right\}, \left\{ c \right\},\left\{ d \right\},\left\{ e \right\},\left\{ {a,e} \right\},\left\{ {b,c} \right\},\left\{ {b,d} \right\},\left\{ {b,e} \right\},\left\{ {c,d} \right\},\left\{ {c,e} \right\},\left\{ {d,e} \right\},\left\{ {a,b,e} \right\},\) \(\left\{ {a,c,e} \right\},\left\{ {a,d,e} \right\},\left\{ {b,c,d} \right\},\left\{ {b,c,e} \right\},\left\{ {b,d,e} \right\},\left\{ {c,d,e} \right\},\left\{ {a,b,c,e} \right\},\left\{ {a,b,d,e} \right\},\left\{ {a,c,d,e} \right\},\) \(\left\{ {b,c,d,e} \right\}\}\) and
\(\vee_{{\beta_{r} }} \left( U \right) = \{ U,\emptyset ,\left\{ a \right\},\left\{ b \right\}, \left\{ c \right\},\left\{ d \right\},\left\{ {a,b} \right\},\left\{ {a,c} \right\},\left\{ {a,d} \right\},\left\{ {a,e} \right\},\left\{ {b,c} \right\},\left\{ {b,d} \right\},\left\{ {c,d} \right\},\left\{ {a,b,c} \right\},\) \(\left\{ {a,b,d} \right\},\left\{ {a,b,e} \right\},\left\{ {a,c,d} \right\},\left\{ {a,c,e} \right\},\left\{ {a,d,e} \right\},\left\{ {b,c,d} \right\},\left\{ {a,b,c,d} \right\},\left\{ {a,b,c,e} \right\},\left\{ {a,b,d,e} \right\},\) \(\left\{ {a,c,d,e} \right\}\}\).
Thus, we calculate the boundary region and the accuracy of the approximations using the techniques of M. Hosny (Definition 2.12) and the present (Definitions 4.1 and 4.5) as shown in Table 4.
Remark 4.5
From Tables 2, 3 and 4, we notice the following:
-
(1)
There are several approaches to approximate the sets. The finest of these methods is there are assumed by using \(j\)-simply open set concepts of the proposed methods in Definitions 4.1, 4.2, and 4.3 for creating the rough approximations because the boundary regions in these cases are minimized (or canceled) by maximizing the lower approximation and minimizing the upper approximation. Moreover, the accuracy degree, in these cases, is more accurate than the other types. For example, all subsets are rough in Y. Yao and Abd El-Monsef approaches. But there are many \(j\)-simply exact sets (the green shaded sets) in the current methods.
-
(2)
The suggested method in Definition 4.1 differs from M. Hosny’s methods. Moreover, the proposed methods in Definitions 4.2 and 4.3 are stronger and more accurate than M. Hosny’s approaches and the other generalizations like Y. Yao, Abd El-Monsef and W. Amer’s approaches. Since the accuracy measure in Definitions 4.2 and 4.3 is bigger than those approaches, then the suggested methodologies will be useful in decision-making for extracting the information and help in eliminating the ambiguity of the data in real-life problems.
-
(3)
The significance of the suggested approximations is not only that it is decreasing or deleting the boundary regions, but also, it is satisfying all characteristics of Pawlak’s model without any restrictions as shown in Proposition 4.1.
5 Economy application
Economic development in most western countries has been an official policy target since the 1950s. Generally speaking, since the 1970s, growth rates have been slightly slower than throughout the two earlier years. Additionally, after the economic recession in 2008, economic growth has not yet improved in utmost countries. The expectation (still principal) that GDP growth will stay to rise at a regular pace of 2.5% in the next period is now being challenged by a growing number of economists and commentators (Malmaeus and Alfredsson 2017; Mafizur Rahman 2017). Mainstream economists are proposing a new standard yearly growth ratio of 1% or less mainly owing to an inferior predictable rate of industrial progress and thus a lesser productivity growth rate. Zero growth or even disastrous trends are considered outside the norm due to the decrease in oil production, other resource limitations, and negative consequences of the degradation of the environment and climate change. A criterion is an attribute in an information system if the field of a condition attribute is well ordered in decreasing or increasing preference. The set-valued information system depends on each condition’s attribute as a criterion. If the objects ordered increase or decrease in choice according to inclusion, then the attribute is an inclusion criterion. As in the example below, national production can be calculated by three techniques. This system depends on a reflexive relation and thus Pawlak’s rough sets can’t apply here. Accordingly, we apply the suggested methods and the previous methods in this decision system of countries, and then, we compare these decision-making methods.
Note that: The introduced application is constructed from real-life problems in Mafizur Rahman (2017).
Example 5.1
(Mafizur Rahman 2017) Consider \(U = \left\{ {C_{1} ,C_{2} ,C_{3} ,C_{4} ,C_{5} } \right\}\) be a universe of five countries and \(A = \left\{ {a_{1} ,a_{2} ,a_{3} } \right\}\) the set of attributes which measure the national product in these countries, where \(a_{1}\) stands for a product method, \(a_{2}\) stands for a spending method and \(a_{3}\) stands for an income method and decision attribute = {growth, not growth}.
Now, suppose that the value sets of the attributes are given by
\(V_{{a_{1} }} = \left\{ {F,T,V} \right\}\) where \(F\), \(T\) and \(V\) represent {Finished product style, Taxes and Value-added style}.
\(V_{{a_{2} }} = \left\{ {C,I,G} \right\}\) where \(C\), \(I\) and \(G\) represent {Consumption, Investment and Government}.
\(V_{{a_{3} }} = \left\{ {S,P,R} \right\}\) where \(S\), \(P\) and \(R\) represent {Salaries, Profits and Rent}.
Table 5 represents an information system with decision attribute \(d = \left\{ {{\text{Growth}},{\text{ Not growth}}} \right\}\).
Thus, the relation that represents this system can be given by
\(xR_{{a_{i} }} y \Leftrightarrow V_{{a_{i} }} \left( x \right) \subseteq V_{{a_{i} }} \left( y \right)\), for each \(i \in \left\{ {1,2,3} \right\}\) and \(x,y \in U\).
For the first attribute \(a_{1}\), we get:
\(xR_{{a_{1} }} y = \left\{ {\left( {C_{1} ,C_{1} } \right),\left( {C_{1} ,C_{2} } \right),\left( {C_{2} ,C_{2} } \right),\left( {C_{3} ,C_{2} } \right),\left( {C_{3} ,C_{3} } \right),\left( {C_{3} ,C_{4} } \right),\left( {C_{4} ,C_{4} } \right),\left( {C_{5} ,C_{4} } \right),\left( {C_{5} ,C_{5} } \right)} \right\}\).
Then, \(C_{1} R_{{a_{1} }} = \left\{ {C_{1} ,C_{2} } \right\}\), \(C_{2} R_{{a_{1} }} = \left\{ {C_{2} } \right\}\), \(C_{3} R_{{a_{1} }} = \left\{ {C_{2} ,C_{3} ,C_{4} } \right\}\), \(C_{4} R_{{a_{1} }} = \left\{ {C_{4} } \right\}\), and \(C_{5} R_{{a_{1} }} = \left\{ {C_{4} ,C_{5} } \right\}\).
By similar way:
\(C_{1} R_{{a_{2} }} = C_{2} R_{{a_{2} }} = \left\{ {C_{1} ,C_{2} ,C_{3} ,C_{4} } \right\}, C_{3} R_{{a_{2} }} = \left\{ {C_{3} } \right\}, C_{4} R_{{a_{2} }} = \left\{ {C_{4} } \right\}, C_{5} R_{{a_{2} }} = \left\{ {C_{4} ,C_{5} } \right\}\) and
\(C_{1} R_{{a_{3} }} = \left\{ {C_{1} ,C_{2} ,C_{4} ,C_{5} } \right\}, C_{2} R_{{a_{3} }} = \left\{ {C_{2} ,C_{4} } \right\}, C_{3} R_{{a_{3} }} = \left\{ {C_{3} ,C_{4} ,C_{5} } \right\}, C_{4} R_{{a_{3} }} = \left\{ {C_{4} } \right\}\),
\(C_{5} R_{{a_{3} }} = \left\{ {C_{4} ,C_{5} } \right\}\).
In order to characterize the set of all condition attributes, we create the following right neighborhoods from all above relations as follows:
\(N_{r} \left( x \right) = \cap_{i} xR_{{a_{i} }}\), for each \(i \in \left\{ {1,2,3} \right\}\) and \(x \in U\).
Thus, \(N_{r} \left( {C_{1} } \right) = \left\{ {C_{1} ,C_{2} } \right\}, N_{r} \left( {C_{2} } \right) = \left\{ {C_{2} } \right\}, N_{r} \left( {C_{3} } \right) = \left\{ {C_{3} } \right\}, N_{r} \left( {C_{4} } \right) = \left\{ {C_{4} } \right\}, N_{r} \left( {C_{5} } \right) = \left\{ {C_{4} ,C_{5} } \right\}\).
Accordingly, the topology generated by these neighborhoods is
-
The family of all \(\delta \beta_{r}\)-open sets of \(U\) is
$$ \delta \beta_{r} O\left( U \right) = \{ U,\emptyset ,\left\{ {C_{1} } \right\},\left\{ {C_{2} } \right\},\left\{ {C_{3} } \right\},\left\{ {C_{4} } \right\},\left\{ {C_{1} ,C_{2} } \right\},\left\{ {C_{1} ,C_{3} } \right\},\left\{ {C_{1} ,C_{4} } \right\},\left\{ {C_{2} ,C_{3} } \right\},\left\{ {C_{2} ,C_{4} } \right\},\left\{ {C_{3} ,C_{4} } \right\}, $$$$ \left\{ {C_{4} ,C_{5} } \right\},\left\{ {C_{1} ,C_{2} ,C_{3} } \right\},\left\{ {C_{1} ,C_{2} ,C_{4} } \right\},\left\{ {C_{1} ,C_{3} ,C_{4} } \right\},\left\{ {C_{1} ,C_{4} ,C_{5} } \right\},\left\{ {C_{2} ,C_{3} ,C_{4} } \right\},\left\{ {C_{2} ,C_{4} ,C_{5} } \right\},\left\{ {C_{3} ,C_{4} ,C_{5} } \right\}, $$\(\left\{ {C_{1} ,C_{2} ,C_{3} ,C_{4} } \right\},\left\{ {C_{1} ,C_{2} ,C_{4} ,C_{5} } \right\},\left\{ {C_{1} ,C_{3} ,C_{4} ,C_{5} } \right\},\left\{ {C_{2} ,C_{3} ,C_{4} ,C_{5} } \right\}\).
-
The family of all δ\({\beta }_{r}\)-open sets of \(U\) is
$$ \tau_{r}^{{ \wedge_{\beta } }} = \{ U,\emptyset ,\left\{ {C_{2} } \right\},\left\{ {C_{3} } \right\},\left\{ {C_{4} } \right\},\left\{ {C_{1} ,C_{2} } \right\},\left\{ {C_{2} ,C_{3} } \right\},\left\{ {C_{2} ,C_{4} } \right\},\left\{ {C_{3} ,C_{4} } \right\},\left\{ {C_{4} ,C_{5} } \right\},\left\{ {C_{1} ,C_{2} ,C_{3} } \right\}, $$$$ \left\{ {C_{1} ,C_{2} ,C_{4} } \right\},\left\{ {C_{2} ,C_{3} ,C_{4} } \right\},\left\{ {C_{2} ,C_{4} ,C_{5} } \right\},\left\{ {C_{3} ,C_{4} ,C_{5} } \right\},\left\{ {C_{1} ,C_{2} ,C_{3} ,C_{4} } \right\},\left\{ {C_{1} ,C_{2} ,C_{4} ,C_{5} } \right\},\left\{ {C_{2} ,C_{3} ,C_{4} ,C_{5} } \right\}\} . $$ -
The family of all \(r\)-simply open sets of \(U\) is:
\({\mathcal{S}\mathcal{M}}_{r} O\left( U \right) = {\mathcal{P}}\left( U \right) - \left\{ {\left\{ {C_{1} ,C_{4} } \right\},\left\{ {C_{2} ,C_{3} ,C_{5} } \right\}} \right\}\).
Now, from Table 5, we apply the methods for two decision subsets \(A = \left\{ {C_{1} ,C_{2} ,C_{4} } \right\}\) and \(B = \left\{ {C_{3} ,C_{5} } \right\}\)) which represent the set of growth and not growth countries, respectively. So, we will calculate the approximations of them by using Y. Yao, Abd El-Monsef, M. Hosny and the proposed methods in the present paper, and then, we give comparisons between the suggested approaches and the previous approaches in decision-making of Table 5.
-
Y. Yao Method:
The approximations for the growth countries set \(A\) are
\(\underline {R}_{n} \left( A \right) = \left\{ {C_{1} ,C_{2} ,C_{4} } \right\}\), and \(\overline{R}_{n} \left( A \right) = \left\{ {C_{1} ,C_{2} ,C_{4} ,C_{5} } \right\}\). Thus, \(B_{n} \left( A \right) = \left\{ {C_{5} } \right\}\) and \(\mu_{n} \left( A \right) = \frac{3}{4}\) and accordingly \(A\) is rough set.
Similarly, the approximations for the not growth countries set \(B\) are
\(\underline {R}_{n} \left( B \right) = \left\{ {C_{3} } \right\}\), and \(\overline{R}_{n} \left( B \right) = \left\{ {C_{3} ,C_{5} } \right\}\). Thus, \(B_{n} \left( A \right) = \left\{ {C_{5} } \right\}\) and \(\mu_{n} \left( A \right) = \frac{1}{2}\) and accordingly \(B\) is rough set.
-
Abd El-Monsef Method:
The approximations for the growth countries set \(A\) are
\(\underline {R}_{r} \left( A \right) = \left\{ {C_{1} ,C_{2} ,C_{4} } \right\}\)., and \(\overline{R}_{r} \left( A \right) = \left\{ {C_{1} ,C_{2} ,C_{4} ,C_{5} } \right\}\). Thus, \(B_{r} \left( A \right) = \left\{ {C_{5} } \right\}\) and \(\mu_{r} \left( A \right) = \frac{3}{4}\) and accordingly \(A\) is rough set.
Similarly, the approximations for the not growth countries set \(B\) are
\(\underline {R}_{r} \left( B \right) = \left\{ {C_{3} } \right\}\), and \(\overline{R}_{r} \left( B \right) = \left\{ {C_{3} ,C_{5} } \right\}\). Thus, \(B_{r} \left( A \right) = \left\{ {C_{5} } \right\}\) and \(\mu_{r} \left( A \right) = \frac{1}{2}\) and accordingly \(B\) is rough set.
-
M. Hosny Methods:
The approximations for the growth countries set \(A\) are
\(\underline {R}_{r}^{\delta \beta } \left( A \right) = \underline {R}_{r}^{{ \wedge_{\beta } }} \left( A \right) = \left\{ {C_{1} ,C_{2} ,C_{4} } \right\}\), and \(\overline{R}_{r}^{\delta \beta } \left( A \right) = \overline{R}_{r}^{{ \wedge_{\beta } }} \left( A \right) = \left\{ {C_{1} ,C_{2} ,C_{4} ,C_{5} } \right\}\). Thus, \(B_{r}^{\delta \beta } \left( A \right) = B_{r}^{{ \wedge_{\beta } }} \left( A \right) = \left\{ {C_{5} } \right\}\) and \(\mu_{r}^{\delta \beta } \left( A \right) = \mu_{r}^{{ \wedge_{\beta } }} \left( A \right) = \frac{3}{4}\) and accordingly \(A\) is rough set.
Similarly, the approximations for the not growth countries set \(B\) are
\(\underline {R}_{r}^{\delta \beta } \left( B \right) = \underline {R}_{r}^{{ \wedge_{\beta } }} \left( B \right) = \left\{ {C_{3} } \right\}\), and \(\overline{R}_{r}^{\delta \beta } \left( B \right) = \overline{R}_{r}^{{ \wedge_{\beta } }} \left( A \right) = \left\{ {C_{3} ,C_{5} } \right\}\). Thus, \(B_{r}^{\delta \beta } \left( B \right) = B_{r}^{{ \wedge_{\beta } }} \left( B \right) = \left\{ {C_{5} } \right\}\) and \(\mu_{r}^{\delta \beta } \left( B \right) = \mu_{r}^{{ \wedge_{\beta } }} \left( B \right) = \frac{1}{2}\) and accordingly \(B\). is rough set.
-
Current Methods:
The \(j\). -simply approximations for the growth countries set \(A\) are
\(\underline {R}_{r}^{sm} \left( A \right) = \overline{R}_{r}^{sm} \left( A \right) = A\). Thus, \(B_{r}^{sm} \left( A \right) = \emptyset\) and \(\mu_{r}^{sm} \left( A \right) = 1\) and accordingly \(A\) is exact set.
Similarly, the \(j\)-simply approximations for the not growth countries set \(B\) are
\(\underline {R}_{r}^{sm} \left( A \right) = \overline{R}_{r}^{sm} \left( A \right) = A\). Thus, \(B_{r}^{sm} \left( A \right) = \emptyset\) and \(\mu_{r}^{sm} \left( A \right) = 1\) and accordingly \(A\) is exact set.
Thus, by using the current methods in Definitions 4.3 and 4.5, the \(j\)-generalized approximations for the growth countries set \(A\) are
Thus, \({{\mathbb{B}}{\mathbb{N}}{\mathbb{D}}}_{r}^{1} \left( A \right) = \emptyset\) and \(\mu_{r}^{1} \left( A \right) = 1\). Also, \({\mathbb{L}}_{r}^{2} \left( A \right) = {\mathbb{U}}_{r}^{2} \left( A \right) = A\). Thus, \({{\mathbb{B}}{\mathbb{N}}{\mathbb{D}}}_{r}^{2} \left( A \right) = \emptyset\) and \(\mu_{r}^{2} \left( A \right) = 1\) and accordingly \(A\) is exact set.
Similarly, the \(j\)-generalized approximations for the not growth countries set \(B\) are
\({\mathbb{L}}_{r}^{1} \left( B \right) = {\mathbb{U}}_{r}^{1} \left( B \right) = B\). Thus, \({{\mathbb{B}}{\mathbb{N}}{\mathbb{D}}}_{r}^{1} \left( B \right) = \emptyset\) and \(\mu_{r}^{1} \left( B \right) = 1\). Also, \({\mathbb{L}}_{r}^{2} \left( B \right) = {\mathbb{U}}_{r}^{2} \left( B \right) = B\). Thus, \({{\mathbb{B}}{\mathbb{N}}{\mathbb{D}}}_{r}^{2} \left( B \right) = \emptyset\) and \(\mu_{r}^{2} \left( B \right) = 1\) and accordingly \(A\) is exact set.
Observation: From the previous comparisons, we note the following:
-
1.
According to Table 5, \(C_{5}\) is surely not growth country. But, according to Y. Yao, Abd El-Monsef and M. Hosny methods, \(C_{5}\) belongs to the boundary of \(A\) (resp. belongs to the boundary of \(B\)) which means that it is possible to be a growth country (resp. not growth country). Therefore, according to these methods, we can’t decide that is the country \(C_{5}\) is a growth country or not?
-
2.
On the other hand, according to our approaches, the boundary regions of \(A\) and \(B\) are empty and therefore we are surely able to decide the countries which are growth country or not and hence we assert the decision about the country \(C_{5}\). Accordingly, the suggested approximations are more accurate than the previous methods.
-
3.
Moreover, we have applied the approximations on two subsets only to illustrate the importance of our methods for decision-making; since the two subsets have an explicit decision from Table 5, then we have proved that our approaches confirm this decision, but the other methods (Yao (1996), Abd El-Monsef et al. (2014a), and Hosny (2018) methods) didn’t identify the decision. Therefore, we can say that the suggested approaches may be useful in discovering the vagueness of the data and help in the decision-making of real-life problems such as in the medical diagnosis which needs accurate decisions.
6 Conclusion and future work
In this article, three different sorts to generalize Pawlak’s rough sets and some of its generalizations have been proposed. In fact, we have applied the concept of simply open sets in the \(j\)-neighborhood space and examined their characteristics. By using the notion of \(j\)-simply open sets, and \(\delta \beta\)-open sets (resp. \(\wedge_{\beta }\)-open sets), new generalizations of Pawlak rough sets and some of its generalizations (such as Yao (1996), Abd El-Monsef et al. (2014a), Amer et al. (2017), and Hosny (2018) methods) have been introduced. The suggested techniques strengthen the previous methods since Theorems 4.1, 4.2, 4.3 and 4.3 and their corollaries proved that our proposed methods are stronger than the other ones. Several comparisons between the presented and the previous approaches were introduced to illustrate these results. The significance of the suggested approximations is not only that it is decreasing or deleting the boundary regions, but also, it is satisfying all characteristics of Pawlak’s models without any restrictions as shown in Proposition 4.1. Finally, an economic application as a simple example to demonstrate the proposed methods has been introduced. Actually, we illustrated that the suggested approximations are more accurate than the previous methods and then it will be useful in the rough sets’ context and extend the application fields of rough set theory. Accordingly, we can say that the suggested structures will provide important tools for the handling of knowledge in information systems. In the future, we will apply the proposed techniques in more real-life applications.
Data availability
Not data were used to support this study.
References
Abd El-Monsef ME (1980) Studies on some pre-topological concepts, Ph. D., Thesis, Tanta University, Egypt
Abd El-Monsef ME, El-Deeb SN, Mahmoud RA (1983) Open sets and -continuous mappings. Bull. Fac. Sci. Assiut University 12 (1):77–90
Abd El-Monsef ME, Embaby OA, El-Bably MK (2014a) Comparison between rough set approximations based on different topologies. Int J Granul Comput Rough Sets Intel Syst 3(4):292–305.
Abd El-Monsef ME, Embaby OA, El-Bably MK (2014b) New approach to covering rough sets via relations. Int J Pure Appl Math 91 (3):329–347
Abd El-Monsef ME, Kozae AM, El-Bably MK (2015) On generalizing covering approximation space, J Egypt Math Soc 23(3):535–545
Abo Khadra AA, Taher BM, El-Bably MK (2007) Generalization of Pawlak approximation space. In: Proceeding of the international conference on mathematics: trends and developments, the Egyptian mathematical society 3:335–346
Afridi MK, Azam N, Yao JT, Alanazi E (2018) A three-way clustering approach for handling missing data using GTRS. Int J Approx Reason 98:11–24
Amer WS, Abbas MI, El-Bably MK (2017) On j-near concepts in rough sets with some applications. J Intel Fuzzy Syst 32(1):1089–1099
Andrijević D (1996) On b-open sets. Math Vesnik 48:59–64
Andrijević D (1986) Semi-preopen sets. ibid 38:24–32
El-Atik AA (1997) A study of some types of mappings on topological spaces, M. Sc. Thesis, Tanta University, Egypt
El-Bably MK (2015a) Comparisons between near open sets and rough approximations. Int J Granul Comput Rough Sets Intel Syst 4(1):64–83
El-Bably MK, Fleifel KK (2017) Some topological structures by relations. J Comput Theor Nanosci 14(8):4100–4103
El-Bably MK (2015b) On topological structures and granular computing, Ph. D. Thesis, Tanta University, Egypt
Hosny M (2018) On generalization of rough sets by using two different methods. J Intel Fuzzy Syst 35(1):979–993
Levine N (1963) Semi-open sets and semi-continuity in topological spaces. Amer Math Monthly 70:36–41
Lin TY (1998) Granular computing on binary relations I: data mining and neighborhood systems, II: rough set representations and belief functions. In: Rough Sets in Knowledge Discovery 1, Polkowski L, Skowron A (Eds.) PhysicaVerlag, Heidelberg 107–140
Mafizur Rahman M (2017) Do population density, economic growth, energy use and exports adversely affect environmental quality in Asian populous countries? Renew Sustain Energy Rev 77:506–514
Malmaeus JM, Alfredsson EC (2017) Potential consequences on the economy of low or no growth-short and long term Perspectives. Ecol Econ 134:57–64
Mashhour AS, Abd El-Monsef ME, El-Deeb SN (1982) On pre-continuous and weak pre-continuous mappings. Proc Math Phys Soc Egypt 53:47–53
Nada S, El Atik A, Atef M (2018) New types of topological structures via graphs. Math Methods Appl Sci 41:5801–5810
Nawar AS, El Atik AA (2019) A model of a human heart via graph nan topological spaces, Int J Biomath 12 (01)
Neubrunnova A (1975) On transfinite sequences of certain types of functions. Acta Fac. Rer Natur Univ Com Math 30:121–126
Njastad O (1965) On some classes of nearly open sets. Pacific J Math 15:961–970
Pawlak Z (1982) Rough sets. Int J Inf Comput Sci 11(5):341–356
Shokry M, Aly RE (2013) Topological properties on graph vs medical application in human heart. Int J Appl Math 15(1):1103–1109
Sierpinski W, Krieger C (1952) General topology, University of Toronto press
Skowron A, Dutta S (2018) Rough sets: past, present, and future. Nat Comput 17(4):855–876
Slowinski R, Vanderpooten D (2000) A generalized definition of rough approximations based on similarity. IEEE Trans Data Eng 12(2):331–336
Tripathy BK, Mitra A (2010) Some topological properties of rough sets and their applications, Int. J. Granular Comput Rough Sets Intel Syst 1(4):355–375
Tripathy BK, Bhambhani U (2018) Properties of multigranular rough sets on fuzzy approximation spaces and their application to rainfall prediction. Int J Intel Syst Appl (IJISA) 10(11):76–90
Tripathy BK, Nagaraju M (2012) On some topological properties of pessimistic multigranular rough sets. I J Intel Syst Appl 8:10–17
Wang L, Yang X, Wu C (2013) Multi-covering based rough set model, Rough Sets, Fuzzy Sets, Data Mining, and Granular Computing. Lect Notes Comput Sci 8170:236–244
Yao YY (1996) Two views of the theory of rough sets in finite universes. Int J Approx Reason 15:291–317
Yao YY (2018) Three-way decision and granular computing. Int J Approx Reason 103:107–123
Yao YY (2013) Granular computing and sequential three-way decisions. In: Lingras P, Wolski M, Cornelis C, Mitra S, Wasilewski P (eds.) RSKT 2013. LNCS (LNAI), Heidelberg: Springer, 8171, 16–27
Yu Z, Bai X, Yun Z (2013) A study of rough sets based on 1-neighborhood systems. Inf Sci 248:103–113
Acknowledgements
The authors sincerely thank and appreciate the reviewers for the careful reading and thoughtful comments. The present version of the paper owes much to their precise and valuable remarks. The authors would like to thank all Tanta Topological Seminar colleagues “under the leadership of Prof. Dr. A. M. Kozae” for their interest, ongoing encouragement, and lively discussions. They would also like to dedicate this work to the memory of Prof. Dr. M. E. Abd El-Monsef “God's mercy,” who passed away in 2014.
Funding
Open access funding provided by The Science, Technology & Innovation Funding Authority (STDF) in cooperation with The Egyptian Knowledge Bank (EKB). The authors were not supported by any organization for the work submitted.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest regarding the publication of this manuscript.
Ethical approval
This article does not contain any studies with human participants or animals performed by any of the authors.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
El-Bably, M.K., El-Sayed, M. Three methods to generalize Pawlak approximations via simply open concepts with economic applications. Soft Comput 26, 4685–4700 (2022). https://doi.org/10.1007/s00500-022-06816-3
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00500-022-06816-3