
Abstract
An input-to-state stability theory, which subsumes results of circle criterion type, is developed in the context of continuous-time Lur’e systems. The approach developed is inspired by the complexified Aizerman conjecture.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
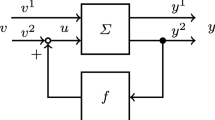
We will be concerned with controlled Lur’e systems of the form
where A, B, \(B_\mathrm{e}\) and C are matrices of appropriate formats, f is a locally Lipschitz nonlinearity and v denotes the input or forcing. Obviously, system (1.1) can be thought of as a feedback system, namely the linear controlled and observed system
with nonlinear output feedback \(u=f(y)\).
Lur’e systems are a common and important class of nonlinear systems and there is a large body of work on the absolute stability theory of these systems: see, for example [6, 7, 16, 19, 27, 28]. Traditionally, Lyapunov approaches to the stability theory of systems of the form (1.1) consider unforced Lur’e systems (i.e., \(v=0\) in (1.1)), whilst Lur’e systems with forcing (usually acting through B, that is, \(B_\mathrm{e}=B\)) have been studied using the input–output framework initiated by Sandberg and Zames in the 1960s, see, for example [27]. More recently, forced Lur’e systems have been analysed in the context of input-to-state stability (ISS) theory, see [1, 2, 12, 13] (and [22] for discrete-time systems). In [1], an ISS result is obtained for Lur’e systems (1.1) under the assumptions that \(B_\mathrm{e} = B\), the underlying linear system has the positive real property and the nonlinearity (which may have superlinear growth) satisfies a suitable cone condition. Partial extensions of the classical Popov and circle criteria to an ISS setting can be found in [2] and [12, 13], respectively. The concept of ISS (for a general controlled nonlinear system) appears first in [23] published in 1989. The theory of ISS which has been subsequently developed, provides a natural stability framework for nonlinear systems with inputs, merging, in a sense, Lyapunov and input–output approaches to stability (the latter initiated by Sandberg and Zames in the 1960s). We refer the reader to [3, 25] for overviews of ISS theory.
In this paper, we derive an ISS result which is reminiscent of the complexified Aizerman conjecture [9, 10] (see [7, 17, 18, 27] for details on the original real Aizerman conjecture). More precisely, let K be a matrix of appropriate format and assume that every complex matrix in the ball \(\{F:\Vert F-K\Vert <r\}\), where \(r>0\), is a stabilizing output feedback gain for the linear system (A, B, C). The main result of the paper (Theorem 3.2) guarantees that, under this hypothesis, the nonlinear system (1.1) is ISS for every locally Lipschitz nonlinearity f for which there exists a \(\mathcal {K}_\infty \) function \(\alpha \) such that
As a corollary (see Corollary 3.10), we derive a clear-cut ISS version of the circle criterion: it is shown that, under conditions very similar to those of the circle criterion, the Lur’e system (1.1) is ISS. In particular, Corollary 3.10 contains earlier ISS versions [12, 13] of the circle criterion as special cases. Moreover, a further corollary (Corollary 3.11) shows that the conditions of the usual textbook version of the circle criterion for global asymptotic stability (see [7, 16, 27]) are actually sufficient for ISS.
Finally, we mention that if A is not Hurwitz and f is bounded (for example, if f is of “saturation” type), then the nonlinearity is not “powerful” enough to counteract large (but bounded) inputs (at least if \(\mathrm{im}\,B\subset \mathrm{im}\,B_\mathrm{e}\)) and the Lur’e system (1.1) is not ISS (see [20] and Proposition 3.4 in the current paper). Correspondingly, it is not difficult to show that if A is not Hurwitz, f is bounded and every complex output feedback gain in the ball \(\{F:\Vert F-K\Vert <r\}\) is stabilizing, then there does not exist \(\alpha \in \mathcal {K}_\infty \) such that (1.2) holds (see Proposition 3.4).
1.1 Notation and terminology
As usual, \(\mathbb {R}\) and \(\mathbb {C}\) denote the fields of real and complex numbers, respectively. We set \(\mathbb {R}_+:=[0,\infty )\).
In the following, let \(\mathbb {F}=\mathbb {R}\) or \(\mathbb {F}=\mathbb {C}\). For \(K\in \mathbb {C}^{m\times p}\) and \(r>0\), we define the open ball in \(\mathbb {F}^{m\times p}\) with centre K and radius r:
For \(M\in \mathbb {C}^{n\times m}\), let \(M^*\) denote the Hermitian transposition of M (transposition if M is real). The open right-half of the complex plane \(\mathbb {C}\) is denoted by \(\mathbb {C}_+\). The Hardy space of all bounded holomorphic functions \(\mathbb {C}_+\rightarrow \mathbb {C}^{p\times m}\) is denoted by \(H^\infty (\mathbb {C}^{p\times m})\). The norm of a function \(H\in H^\infty (\mathbb {C}^{p\times m})\) is given by
where \(\Vert \cdot \Vert \) is the operator norm on \(\mathbb {C}^{p\times m}\) induced by the 2-norms on \(\mathbb {C}^m\) and \(\mathbb {C}^p\).
Let \(A\in \mathbb {C}^{n\times n}\) be Hurwitz (that is, all eigenvalues of A have negative real parts), let \(B\in \mathbb {C}^{n\times m}\) and \(C\in \mathbb {C}^{p\times n}\). The structured stability radius of A with respect to the perturbation structure given by B and C is defined by
The number \(r_{\mathbb {C}}(A; B, C)\) is said to be the complex stability radius, whilst \(r_{\mathbb {R}}(A; B, C)\) is called the real stability radius, see [8, 10]. Note that, even if A, B and C are real, the perturbation \(\Delta \) in the definition of \(r_{\mathbb {C}}(A; B, C)\) is in \(\mathbb {C}^{m \times p}\).
Finally, we recall the definitions of certain classes of comparison functions. Let \(\mathcal {K}\) denote the set of all continuous functions \(\varphi :\mathbb {R}_+\rightarrow \mathbb {R_+}\) such that \(\varphi (0)=0\) and \(\varphi \) is strictly increasing. Moreover,
We denote by \(\mathcal {KL}\) the set of functions \(\psi :\mathbb {R}_+\times \mathbb {R}_+ \rightarrow \mathbb {R}_+\) with the following properties: \(\psi (\cdot \,, t)\in \mathcal {K}\) for every \(t\ge 0\), and \(\psi (s,\cdot \,)\) is non-increasing with \(\lim _{t\rightarrow \infty }\psi (s, t) = 0\) for every \(s\ge 0\). Note that, following [24–26], continuity is not imposed in the above definition of a \(\mathcal {KL}\)-function. It is known that a discontinuous \(\mathcal {KL}\)-function can be bounded from above by a continuous \(\mathcal {KL}\)-function, see [24, Proposition 7]. For more details on comparison functions, we refer the reader to [15].
2 Preliminaries
Set \(\Sigma :=\mathbb {R}^{n\times n}\times \mathbb {R}^{n\times m}\times \mathbb {R}^{p\times n}\). With a triple \((A,B,C)\in \Sigma \), we associate the following controlled and observed linear system
The transfer function (matrix) G of (2.1) (or of the triple (A, B, C)) is given by
The closed-loop system obtained by application of linear feedback of the form \(u=Ky+v\) to (2.1), where \(K\in \mathbb {R}^{m \times p}\) and \(v\in L^{\infty }_{ loc }(\mathbb {R}_+,\mathbb {R}^m)\), is described by the triple \((A+BKC,B,C)\in \Sigma \). The associated transfer function is
We denote the set of stabilizing output feedback matrices for (A, B, C) by \(\mathbb {S}_{\mathbb {F}}(A,B,C)\), that is,
where \(\mathbb {F}=\mathbb {R}\) or \(\mathbb {F}=\mathbb {C}\), and we will be speaking of real or complex stabilizing output feedback matrices, respectively. Moreover, defining
we have that
If \(\mathbb {S}_{\mathbb {F}}(A,B,C)\not =\emptyset \), then (A, B, C) is stabilizable and detectable and equality holds in (2.2).
The following lemma provides some simple properties of linear output feedback.
Lemma 2.1
Let \((A, B, C)\in \Sigma \) with transfer function G, let \(K\in \mathbb {C}^{m \times p}\) and let \(r>0\).
-
(a)
\(\mathbb {S}_{\mathbb {C}} \left( G\right) -K = \mathbb {S}_{\mathbb {C}} \left( G^K\right) \).
-
(b)
\(\mathbb {B}_{\mathbb {C}}(K,r) \subseteq \mathbb {S}_{\mathbb {C}} \left( G\right) \) if, and only if, \(\mathbb {B}_{\mathbb {C}}(0, r) \subseteq \mathbb {S}_{\mathbb {C}} \left( G^K\right) \).
-
(c)
\((G^K)^L= G^{K+L}\) for all \(L\in \mathbb {C}^{m \times p}\).
-
(d)
\(\mathbb {B}_{\mathbb {C}}(K, r) \subseteq \mathbb {S}_{\mathbb {C}} \left( G\right) \) if, and only if, \(\left\| G^K\right\| _{H^{\infty }} \le 1/r\).
Assume that, in Lemma 2.1, the matrix K is real, that is, \(K\in \mathbb {R}^{m \times p}\). Then statements (a) and (b) and the sufficiency part of statement (d) remain valid if \(\mathbb {B}_\mathbb {C}\) and \(\mathbb {S}_\mathbb {C}\) are replaced by \(\mathbb {B}_\mathbb {R}\) and \(\mathbb {S}_\mathbb {R}\), respectively. However, the condition \(\mathbb {B}_\mathbb {R}(K,r)\subseteq \mathbb {S}_\mathbb {R}(G)\) does not imply that \(\left\| G^K\right\| _{H^{\infty }} \le 1/r\).
Proof of Lemma 2.1
The proofs of statements (a)–(c) are straightforward and are therefore omitted.
We proceed to prove statement (d). Assuming that \(\left\| G^K\right\| _{H^{\infty }} \le 1/r\), it is clear that \(\mathbb {B}_{\mathbb {C}}(0,r) \subseteq \mathbb {S}_{\mathbb {C}} \left( G^K\right) \) (by the “small-gain theorem”). Hence, by statement (b), \(\mathbb {B}_{\mathbb {C}}(K,r) \subseteq \mathbb {S}_{\mathbb {C}} \left( G\right) \).
We prove the reverse implication by contraposition. To this end, assume \(\left\| G^K\right\| _{H^{\infty }}>1/r\). We have to show that there exists \(L\in \mathbb {B}_{\mathbb {C}}(K,r)\) such that \(L\not \in \mathbb {S}_{\mathbb {C}} \left( G\right) \). By assumption, \(\left\| G^K(z)\right\| > 1/r\) for some \(z\in \mathbb {C}_+\). As is well known from matrix theory, there exists \(M\in \mathbb {C}^{m \times p}\) with \(\left\| M\right\| = 1/{\left\| G^K(z)\right\| }< r\) and \(\det (I - MG^K(z)) = 0\). Now
and we conclude that \(M(G^K)^M\) has a pole at z. Setting \(L:=K+M\) and using statement (c), we see that \(G^L=G^{K+M}=(G^K)^M\) has a pole at z, showing that \(L\not \in \mathbb {S}_{\mathbb {C}} \left( G\right) \). Obviously, \(L\in \mathbb {B}_{\mathbb {C}}(K,r)\), completing the proof of statement (d). \(\Box \)
Next we state a version of the well-known bounded real lemma which is convenient for our purposes.
Lemma 2.2
Let \((A, B, C)\in \Sigma \). Assume that A is Hurwitz and that the transfer function G of (A, B, C) satisfies \(\left\| G\right\| _{H^{\infty }} \le 1\). Then there exist a positive semi-definite matrix \(P = P^* \in \mathbb {R}^{n \times n}\) and a matrix \(L\in \mathbb {R}^{m\times n}\) such that
Proof
By elementary stability radius theory, \(r_{\mathbb {C}}(A;B,C)=1/\left\| G\right\| _{H^{\infty }}\ge 1\), see [8, 10]. Hence, by [8, Theorem 3.3], there exists a matrix \(Q = Q^* \in \mathbb {R}^{n \times n}\) which solves the algebraic Riccati equation
Setting \(P := - Q\) and \(L := -B^*P\), it follows that P solves the Lyapunov matrix equation
Since A is Hurwitz, (2.3) has a unique solution which is given by
see, for example [10, Corollary 3.3.46]. Obviously, the matrix \(C^*C + L^*L\) is positive semi-definite and it follows that P is positive semi-definite, completing the proof. \(\square \)
In the following, we will consider linear systems of the form
where
It is convenient to define the behaviour \(\mathcal {B}(A, B, B_\mathrm{e}, C)\) of (2.4) (or of the quadruple \((A,B,B_\mathrm{e}, C)\)) by
where
Obviously, in the above definition of \(\mathcal {B}(A, B, B_\mathrm{e}, C)\), the solution x of the differential equation in (2.4) has to be understood in the sense of Carathéodory. A triple (v, u, x, y) is in \(\mathcal {B}(A, B, B_\mathrm{e}, C)\) if, and only if,
and \(y=Cx\).
We now use the bounded real lemma to obtain a quadratic form useful in stability analysis.
Proposition 2.3
Let \((A, B, B_\mathrm{e}, C)\in \Sigma _\mathrm{e}\) and assume that \(\mathbb {B}_{\mathbb {C}}(K, r) \subseteq \mathbb {S}_{\mathbb {C}} \left( A,B,C\right) \), where \(K \in \mathbb {R}^{m \times p}\) and \(r > 0\). Then there exists positive semi-definite \(P = P^* \in \mathbb {R}^{n \times n}\) with the following property: for every \(\alpha \in \mathcal {K}_\infty \), there exists \(\beta \in \mathcal {K}_\infty \), such that, for every \((v,u,x,y)\in \mathcal {B}(A, B, B_\mathrm{e}, C)\), the function \(V :\mathbb {R}^n \rightarrow \mathbb {R}_+\) defined by \(V(\zeta ):= \left\langle P\zeta , \zeta \right\rangle \) satisfies
for almost every \(t\ge 0\).
For the proof of this result, the following simple lemma will be useful.
Lemma 2.4
If \(\alpha \in \mathcal {K}_{\infty }\), then there exists \(\beta \in \mathcal {K}_{\infty }\) such that
Proof
If \(s_2 \le \alpha (s_1)\), then \(s_1s_2 \le s_1 \alpha (s_1)\); and if \(s_2 > \alpha (s_1)\), then \(s_1 < \alpha ^{-1}(s_2)\), so that \(s_1s_2 < s_2 \alpha ^{-1}(s_2)\). Hence \(\beta (s_2) := s_2 \alpha ^{-1}(s_2)\) satisfies all the requirements. \(\square \)
Proof of Proposition 2.3
Set \(A_K:=A+BKC\), and consider the system \((A_K, rB, C)\), the transfer function of which is \(rG^K\), where \(G(s)=C(sI-A)^{-1}B\). By hypothesis,
Hence, \(A_K\) is Hurwitz and, furthermore, it follows from statement (d) of Lemma 2.1 that, \(r\left\| G^K\right\| _{H^\infty }\le 1\). An application of Lemma 2.2 to the system \((A_K, rB, C)\) shows that there exist a positive semi-definite matrix \(Q=Q^* \in \mathbb {R}^{n \times n}\) and a matrix \(L\in \mathbb {R}^{m\times n}\) such that
Define the quadratic form U by \(U(\zeta ) := \left\langle Q\zeta , \zeta \right\rangle \) for all \(\zeta \in \mathbb {R}^n \). Let \((v,u, x, y) \in \mathcal {B}(A, B, B_\mathrm{e}, C)\) be arbitrary. Writing \(w:=u-Ky\), then, trivially, the quadruple \((v, w, x, y)\in \mathcal {B}(A_K, B, B_\mathrm{e}, C)\) and we obtain that, for almost every \(t\ge 0\),
Setting \(c:=2\Vert Q\Vert \Vert B_\mathrm{e}\Vert \) and invoking (2.5), it follows that, for almost every \(t\ge 0\),
By Lemma 2.4, for a given \(\alpha \in \mathcal {K}_{\infty }\), there exists \(\beta \in \mathcal {K}_{\infty }\) such that
Consequently, for almost every \(t\ge 0\),
The claim now follows with \(P:=r^2Q\). \(\square \)
The next proposition (inspired by [1]) gurantees the existence of another quadratic form which will be useful in the ISS analysis of Lur’e systems
Proposition 2.5
Let \((A, B,B_\mathrm{e}, C)\in \Sigma _\mathrm{e}\) and assume that the pair (A, C) is detectable. Then there exists a positive-definite matrix \(P= P^* \in \mathbb {R}^{n \times n}\) and \(\delta >0\) such that, for every \((v,u, x, y) \in \mathcal {B}(A, B, B_\mathrm{e}, C)\), the function \(V: \mathbb {R}^n \rightarrow \mathbb {R}_+\) defined by \(V(\zeta ):= \left\langle P\zeta , \zeta \right\rangle \) satisfies
Proof
By detectability of (A, C), there exists \(H \in \mathbb {R}^{n \times p}\) such that \(A+HC\) is Hurwitz. Consequently, there exists a (unique) positive-definite solution \(Q = Q^*\) of the Lyapunov equation
see, for example [10, Corollary 3.3.46]. Define the quadratic form U by \(U(\zeta ) := \left\langle Q\zeta , \zeta \right\rangle \) and let \((v,u, x, y)\in \mathcal {B}(A, B, B_\mathrm{e}, C)\). Then
Setting \(w:=Bu+B_\mathrm{e}v\) and invoking (2.6), we conclude that, for almost every \(t\ge 0\),
An application of the Cauchy–Schwarz inequality and subsequent use of the elementary inequality \(ab\le a^2/c^2 + c^2b^2\) (which is valid for all real a, b and c, \(c\not =0\)) show that there exist positive constants \(c_1, c_2, c_3\) and \(c_4\) such that, for all \((v, u, x, y)\in \mathcal {B}(A, B, B_\mathrm{e}, C)\),
Setting \(c_5:=1/\max \{c_2,c_3,c_4\}\), the claim follows with \(P=c_5Q\) and \(\delta :=c_1c_5\). \(\square \)
3 ISS of Lur’e systems
In this section, we will apply the results provided in Sect. 2 to prove ISS properties for Lur’e systems of the form
where \((A,B,B_\mathrm{_e}, C)\in \Sigma _\mathrm{e}\), \(f:\mathbb {R}^p\rightarrow \mathbb {R}^m\) is locally Lipschitz and \(v\in L^\infty _\mathrm{loc}(\mathbb {R}_+,\mathbb {R}^{m_\mathrm{e}})\) is the control (forcing, input) function. Obviously, (3.1) can (and should) be thought of as the feedback system given by
Frequently, we shall refer to (3.1) as the Lur’e system \((A,B,B_\mathrm{e}, C,f)\).
It is convenient to define the behaviour \(\mathcal {B}(A, B, B_\mathrm{e}, C,f)\) of (3.1) (or of the Lure’e system \((A,B,B_\mathrm{e}, C,f)\)) by
This definition may seem restrictive, since only trajectories defined on the whole half-line \(\mathbb {R}_+\) are included in the behaviour. However, in the following, we will impose an assumption on f which implies that f is linearly bounded, and hence, for every initial condition \(x(0)=x^0\) and every \(v\in L^{\infty }_{ loc }(\mathbb {R}_+,\mathbb {R}^{m_\mathrm{e}})\), there exists a unique absolutely continuous solution of (3.1) which is defined on \(\mathbb {R}_+\).
The following lemma is obvious and does not require a proof.
Lemma 3.1
Let \((A, B, B_\mathrm{e}, C)\in \Sigma _\mathrm{e}\), let \(f:\mathbb {R}^p\rightarrow \mathbb {R}^m\) be locally Lipschitz and let \((v,x)\in L^{\infty }_\mathrm{loc}(\mathbb {R}_+,\mathbb {R}^{m_\mathrm{e}}) \times W^{1,1}_\mathrm{loc}(\mathbb {R}_+,\mathbb {R}^n)\). Then \((v, x) \in \mathcal {B}(A, B, B_\mathrm{e}, C,f)\) if, and only if, \((v,f \circ Cx, x, Cx) \in \mathcal {B}(A, B, B_\mathrm{e}, C)\).
The Lur’e system (3.1) (or the quintuple \((A,B, B_\mathrm{e}, C,f)\)) is said to be input-to-state stable (ISS) if there exist \(\psi \in \mathcal {KL}\) and \(\varphi \in \mathcal {K}\) such that, for all \((v, x) \in \mathcal {B}(A, B, B_\mathrm{e}, C, f)\),
The concept of ISS (for a general controlled nonlinear system) appeared first in [23]. For overviews of ISS theory, we refer the reader to [3, 25].
We say that two functions \(V_1,V_2:\mathbb {R}^n \rightarrow \mathbb {R}_+\) are \(\mathcal {K}_{\infty }\)-equivalent if there exist \(\alpha _1,\alpha _2\in \mathcal {K}_{\infty }\) such that \(\alpha _1(V_1(\zeta )) \le V_2(\zeta ) \le \alpha _2(V_1(\zeta ))\) for all \(\zeta \in \mathbb {R}^n\). A continuously differentiable function \(V:\mathbb {R}^n \rightarrow \mathbb {R}_+\) is said to be an ISS-Lyapunov function for (3.1) (or for \((A, B, B_\mathrm{e}, C,f)\)) if V and \(\left\| \cdot \right\| _{\mathbb {R}^n}\) are \(\mathcal {K}_{\infty }\)-equivalent and there exist \(\beta ,\gamma \in \mathcal {K}_{\infty }\) such that, for all \((v, x) \in \mathcal {B}(A,B, B_\mathrm{e},C,f)\),
It is a well-known result in ISS theory (see, for example [25]) that the existence of an ISS-Lyapunov function guarantees ISS.
We are now ready to state and prove the main result of this paper.
Theorem 3.2
Let \((A, B, B_\mathrm{e}, C)\in \Sigma _\mathrm{e}\), \(f:\mathbb {R}^p\rightarrow \mathbb {R}^m\) be locally Lipschitz, \(r > 0\) and \(K \in \mathbb {R}^{m \times p}\). If \(\mathbb {B}_{\mathbb {C}}(K, r) \subseteq \mathbb {S}_{\mathbb {C}} \left( A,B,C\right) \) and there exists \(\alpha \in \mathcal {K}_{\infty }\) such that
then the Lur’e system \((A, B, B_\mathrm{e}, C,f)\) is ISS.
In particular, if A is Hurwitz, then the Lur’e system \((A, B, B_\mathrm{e}, C,f)\) is ISS, provided that there exists \(\alpha \in \mathcal {K}_{\infty }\) such that \(\left\| f(\xi )\right\| \le r\left\| \xi \right\| - \alpha (\left\| \xi \right\| )\) for all \(\xi \in \mathbb {R}^p\), where \(r=r_{\mathbb {C}}(A;B,C)\). This shows that the complex stability radius \(r_{\mathbb {C}}(A;B,C)\) provides a measure of the robustness of ISS of the linear system \(\dot{x}=Ax+B_\mathrm{e}v\) with respect to additive nonlinear perturbations F of the form \(F(x)=Bf(Cx)\).
Proof of Theorem 3.2
It is sufficient to show that there exists an ISS-Lyapunov function for \((A, B, B_\mathrm{e}, C, f)\). This will be done by constructing two functions V and W and then showing that \(V+W\) is an ISS-Lyapunov function.
Since \(\mathbb {B}_{\mathbb {C}}(K, r)\subseteq \mathbb {S}_{\mathbb {C}} \left( A,B,C\right) \), it is clear that the system (A, B, C) is stabilizable and detectable. Proposition 2.5 guarantees the existence of a positive definite \(Q = Q^* \in \mathbb {R}^{n \times n}\) and a positive \(\delta >0\) such that, for every \((v,u,x,y)\in \mathcal {B}(A, B, B_\mathrm{e}, C)\), the function \(U_0: \mathbb {R}^n \rightarrow \mathbb {R}_+\) defined by \(U_0(\zeta ):= \left\langle Q\zeta , \zeta \right\rangle \) satisfies
Let \((v,x) \in \mathcal {B}(A, B, B_\mathrm{e}, C, f)\). Then, by Lemma 3.1, \((v, f\circ Cx, x, Cx) \in \mathcal {B}(A, B, B_\mathrm{e}, C, f)\), and thus
By (3.3),
where \(c_0:=2(\Vert K\Vert ^2+r^2)\). Setting
it then follows from (3.4) that, for every \((v,x) \in \mathcal {B}(A, B, B_\mathrm{e}, C, f)\),
It is convenient to define constants
and to choose positive constants \(c_4\) and \(c_5\) such that
with
being a possible choice.
Furthermore, we define \(\mu :\mathbb {R}_+\rightarrow \mathbb {R}_+\) by
where \(\alpha \) is the \(\mathcal {K}_{\infty }\)-function from (3.3), the existence of which is part of the hypothesis. It is obvious that \(\mu \in \mathcal {K}_{\infty }\). By Proposition 2.3, there exist positive semi-definite \(P = P^* \in \mathbb {R}^{n \times n}\) and \(\beta \in \mathcal {K}_{\infty }\) such that, for every \((v,u,x,y)\in \mathcal {B}(A, B, B_\mathrm{e}, C)\), the function \(V :\mathbb {R}^n\rightarrow \mathbb {R}_+\) defined by \(V(\zeta ): = \left\langle P\zeta , \zeta \right\rangle \) satisfies
Let \((v,x)\in \mathcal {B}(A, B, B_\mathrm{e}, C,f)\). Then, by Lemma 3.1, \((v,f\circ Cx,x,Cx)\in \mathcal {B}(A, B, B_\mathrm{e}, C)\), and thus,
Invoking (3.3), we have
Inequality (3.3) implies in particular that \(\alpha (s)\le rs\) for all \(s\ge 0\), and so
Using this estimate in (3.7), we obtain
We will now “adjust” U by composing it with a suitable function h, that is, we will be considering
The function \(h:\mathbb {R}_+\rightarrow \mathbb {R}_+\) is given by
where \(k:\mathbb {R}_+\rightarrow \mathbb {R}_+\) is defined as follows:
Obviously, h is continuously differentiable and
where we have used again that \(\alpha (s)\le rs\) for all \(s\ge 0\).
We claim that
To avoid breaking the flow of the argument, we relegate the verification of (3.10) to the end of the proof.
Invoking (3.5), it follows that, for every \((v,x) \in \mathcal {B}(A, B, B_\mathrm{e}, C, f)\),
Combining this with (3.10) shows that, for every \((v,x) \in \mathcal {B}(A, B, B_\mathrm{e}, C, f)\),
where we have used (3.9). Defining \(\gamma \in \mathcal {K}_{\infty }\) by \(\gamma (s): =\beta (s)+c_6s^2\) for all \(s\ge 0\), it follows from (3.8) and (3.11) that, for every \((v,x) \in \mathcal {B}(A, B, B_\mathrm{e}, C, f)\),
Consequently, if \(V+W\) and \(\left\| \cdot \right\| _{\mathbb {R}^n}\) are \(\mathcal {K}_{\infty }\)-equivalent, then \(V+W\) is an ISS-Lyapunov function for \((A, B, B_\mathrm{e}, C, f)\). To show that \(V+W\) and \(\left\| \cdot \right\| _{\mathbb {R}^n}\) are \(\mathcal {K}_{\infty }\)-equivalent, note that
where \(c_7:=\Vert P\Vert +c_5^2c_6\) and \(\eta _1\in \mathcal {K}_{\infty }\) is defined by \(\eta _1(s):=c_7s^2\) for all \(s\ge 0\). Moreover, noting that \(h\in \mathcal {K}_{\infty }\), it is clear that \(\eta _2\), defined by \(\eta _2(s):=h(c_4^2s^2)\) for all \(s\ge 0\), is also in \(\mathcal {K}_{\infty }\), and it follows that
Inequalities (3.13) and (3.14) show that \(V+W\) and \(\left\| \cdot \right\| _{\mathbb {R}^n}\) are \(\mathcal {K}_{\infty }\)-equivalent. We have now established that \(V+W\) is an ISS-Lyapunov function for \((A, B, B_\mathrm{e}, C, f)\).
It only remains to prove that (3.10) holds. To this end, using (3.6), we estimate,
Consequently,
We consider two cases.
Case a. If \(\Vert C\zeta \Vert ^2>\varepsilon \Vert \zeta \Vert ^2/2\), then it follows from (3.15) and the definition of \(c_1\), \(c_2\) and \(c_3\) that
Case b. If \(\Vert C\zeta \Vert ^2\le \varepsilon \Vert \zeta \Vert ^2/2\), then trivially,
Therefore, we conclude
Furthermore, using again (3.6), we obtain
implying that
Combination of (3.16) and (3.17) yields
which is equivalent to (3.10), completing the proof. \(\square \)
The ISS property of the Lur’e system \((A,B,B_\mathrm{e},C,f)\), guaranteed by Theorem 3.2, means that there exist \(\psi \in \mathcal {KL}\) and \(\varphi \in \mathcal {K}\) such that the ISS estimate (3.2) holds for all \((v, x)\in \mathcal {B}(A, B, B_\mathrm{e}, C, f)\). As follows from ISS theory, the comparison functions \(\psi \) and \(\varphi \) depend only on the \(\mathcal {K}_{\infty }\)-functions \(\mu \), \(\gamma \), \(\eta _1\) and \(\eta _2\), see (3.12)–(3.14). These functions in turn depend only on A, B, \(B_\mathrm{e}\), C, K, r and \(\alpha \), but not on f. This means that, in the context of Theorem 3.2, there exist comparison functions \(\psi \in \mathcal {KL}\) and \(\varphi \in \mathcal {K}\) such that, for every f satisfying (3.3), the ISS estimate (3.2) holds. Furthermore, it can be shown that if \(\alpha \) is linear, then we can choose \(\psi \) and \(\varphi \) as follows: \(\psi (s,t)=Me^{-at}s\) and \(\varphi (s)=bs\) for suitable constants \(M\ge 1\) and \(a,b>0\).
As the following example shows, Theorem 3.2 does not remain true if the condition on \(\alpha \) is relaxed to \(\alpha \in \mathcal {K}\).
Example 3.3
Define \(\alpha \in \mathcal {K}{\setminus } \mathcal {K}_{\infty }\) by \(\alpha (s) := 1 - e^{-s}\) and \(f :\mathbb {R} \rightarrow \mathbb {R}\) by \(f(\xi ) := \xi - \)sgn\((\xi )\alpha (|\xi |)\). Consider the one-dimensional forced Lur’e system
Obviously, \(-1 + k\) is Hurwitz for all \(k\in \mathbb {C}\) with \(|k| < 1\) and
Consequently, with the exception of the condition \(\alpha (s)\rightarrow \infty \) as \(s\rightarrow \infty \), the hypotheses of Theorem 3.2 are satisfied. Choosing \(v(t) = 1 + \varepsilon \) for some positive \(\varepsilon \), we have \(\dot{x}(t) \ge \varepsilon \) for all \(t \ge 0\) and hence the Lur’e system is not ISS. \(\square \)
We note that, in the unforced case (\(v = 0\)), the equilibrium 0 in Example 3.3 is globally asymptotically stable. In fact, it can be shown that if \(\mathbb {B}_{\mathbb {C}}(K, r) \subseteq \mathbb {S}_{\mathbb {C}} \left( A, B, C\right) \), then, for any locally Lipschitz \(f :\mathbb {R}^p \rightarrow \mathbb {R}^m\), satisfying \(\left\| f(\xi ) - K\xi \right\| < r \left\| \xi \right\| \) for all \(\xi \in \mathbb {R}^p{\setminus }\{0\}\), the equilibrium 0 of the unforced Lur’e system
is globally asymptotically stable.
The following result identifies a class of Lur’e systems for which condition (3.3) does not hold and hence Theorem 3.2 does not apply. The result also shows that, under a mild additional assumption, these Lur’e systems are not ISS.
Proposition 3.4
Let \((A, B, B_\mathrm{e}, C)\in \Sigma _\mathrm{e}\), \(f:\mathbb {R}^p\rightarrow \mathbb {R}^m\) be locally Lipschitz, \(r > 0\) and \(K \in \mathbb {R}^{m \times p}\). Assume that A is not Hurwitz, f is bounded and \(\mathbb {B}_{\mathbb {C}}(K, r)\subseteq \mathbb {S}_{\mathbb {C}} \left( A,B,C\right) \). Then the following statements hold.
(a) There does not exist \(\alpha \in \mathcal {K}_{\infty }\) such that \(\Vert f(\xi )-K\xi \Vert \le r\Vert \xi \Vert -\alpha (\Vert \xi \Vert )\) for all \(\xi \in \mathbb {R}^p\) (that is, condition (3.3) does not hold).
(b) Under the additional assumption that \(\mathrm{im}\,B\subset \mathrm{im}\,B_\mathrm{e}\), the Lur’e system \((A, B, B_\mathrm{e}, C,f)\) is not ISS.
Proof
(a) Since A is not Hurwitz, it is clear that \(r\le \Vert K\Vert \). Moreover,
Let \(\xi _0\in \mathbb {R}^p\) be such that \(\Vert \xi _0\Vert =1\) and \(\Vert K\xi _0\Vert =\Vert K\Vert \). Then, for all \(a\ge 0\), we have
yielding the claim.
(b) We first prove the claim under the assumption that (A, B) is controllable. Let \(z(\cdot \,;w)\) denote the solution of the initial value problem
Then there exists \(w\in L^\infty (\mathbb {R}_+,\mathbb {R}^m)\) such that \(x:=z(\cdot \,;w)\) is unbounded (because otherwise the linear system (A, B, I) would be bounded-input–bounded-output stable, and therefore, by controllability and observability of (A, B, I), A would be Hurwitz, which is not possible). By boundedness of f, we have that \(w-f(Cx)\in L^\infty (\mathbb {R}_+,\mathbb {R}^m)\), and, since \(\text{ im }\,B\subset \text{ im }\,B_\mathrm{e}\), there exists \(v\in L^\infty (\mathbb {R}_+,\mathbb {R}^{m_\mathrm{e}})\) such that \(B_\mathrm{e}v=B(w-f(Cx))\). Thus,
Since v is bounded and x is unbounded, it follows that the Lur’e system is not ISS.
If (A, B) is not controllable, then combining an argument similar to that used above with Kalman’s controllability decomposition yields the claim. \(\square \)
Results which are (vaguely) related to Proposition 3.4 can be found in [20], where it is shown that, under suitable assumptions, a “small” signal ISS property holds for Lur’e systems with nonlinearities of “saturation” type.
We now illustrate Theorem 3.2 by two examples.
Example 3.5
We consider a system modelling a sequence of linked chemical reactions inspired by [21]:
where \(z_1, z_2\) and \(z_3\) represent the concentrations of reagents, \(a_1\), \(a_2\) and \(a_3\) are positive constants, \(d_1, d_2\) and \(d_3\) represent external disturbances and the locally Lipschitz nonlinearity \(g:\mathbb {R}_+\rightarrow \mathbb {R}_+\) represents inhibition of creation of reagent \(z_1\) depending on the concentration of reagent \(z_3\). The latter means that g is a decreasing function and hence g has negative derivative (provided that g is differentiable). The feedback loop corresponding to g, sometimes referred to as negative feedback, is common in metabolic control mechanisms, see Section 7.2 from [21]. Setting
the system (3.18) can be written in the form
where \(z:=(z_1,z_2,z_3)^*\) and \(d:=(d_1,d_2,d_3)^*\).
Note that \(z_1, z_2\) and \(z_3\) are naturally non-negative. Since A is a Metzler matrix (all off-diagonal entries are non-negative), B and C have non-negative entries and g maps \(\mathbb {R}_+\) into \(\mathbb {R}_+\), it is well known that, for non-negative initial conditions and for non-negative disturbances, the corresponding trajectories of (3.19) are non-negative (here vectors are referred to as non-negative if each component is non-negative).
The matrix A is Hurwitz and thus, the transfer function G of the single-input single-output system (A, B, C), given by \(G(s)=C(sI-A)^{-1}B\), is bounded and holomorphic on \(\mathbb {C}_+\). From a routine argument, it follows that
Consequently, setting \(r:=a_1a_2a_3>0\), we have
Since \(g:\mathbb {R_+}\rightarrow \mathbb {R_+}\) is decreasing (and excluding the trivial case \(g(\xi )\equiv 0\)), it is clear that there exists a unique number \(\xi ^\dagger >0\) such that \(g(\xi ^\dagger )=r\xi ^\dagger \). A straightforward calculation shows that the vector
is the unique equilibrium of (3.19) with \(d(t)\equiv 0\).
Before we can apply Theorem 3.2, we need to transform (3.19) in such a way that the equilibrium \(z^\dagger \) is moved to the origin. To this end, define \(f:\mathbb {R}\rightarrow \mathbb {R}\) by
Let z(0) and d be non-negative and let z be the corresponding (non-negative) solution z of (3.19). Defining the function x by \(x(t)=z(t)-z^\dagger \), it follows that
We note that 0 is an equilibrium of (3.21) with \(d(t)\equiv 0\). Furthermore, if (3.21) is ISS (with respect to the equilibrium 0), then (3.19) is ISS (with respect to the equilibrium \(z^\dagger \)) for non-negative disturbances d, that is, there exist \(\psi \in \mathcal {KL}\) and \(\varphi \in \mathcal {K}_{\infty }\) such that, for all \(z(0)\in \mathbb {R}^3_+\) and non-negative \(d\in L^\infty _\mathrm{loc}(\mathbb {R}_+, \mathbb {R}^3_+)\),
Therefore, appealing to (3.20) and invoking Theorem 3.2, we may conclude that (3.19) is ISS, provided that there exists \(\alpha \in \mathcal {K}_\infty \) such that
Let us consider a typical negative feedback nonlinearity g:
It is easy to verify that, in this case,
If \(r>1/2\), then a routine calculation shows that \(\xi ^\dagger <1\) and so,
showing that (3.23) holds with \(\alpha \) given by \(\alpha (s) =r(1-\xi ^\dagger )s\). Consequently, if g is given by (3.24), then (3.19) is ISS, provided that \(r=a_1a_2a_3>1/2\). We mention that this conclusion can also be obtained by writing (3.21) in component form
and applying a suitable nonlinear small-gain ISS theorem for feedback interconnections of several subsystems, see [4, Theorem 11] or [5, Corollary 5.6].Footnote 1 We will make more systematic contact with small-gain ideas further below (see Corollary 3.8 and the paragraph after the proof of Corollary 3.8).
To consider a specific numerical example, let g is given by (3.24) and choose \(a_1=a_2=1\) and \(a_3=3/5\). Then \(r=a_1a_2a_3=3/5>1/2\) and hence (3.19) is ISS. Note that in this case \(\xi ^{\dagger } =(\sqrt{69} - 3)/6\) and consequently \(z^{\dagger } =\big ((\sqrt{69} - 3)/10, (\sqrt{69} - 3)/10, (\sqrt{69} - 3)/6\big )^*\). Simulations with initial state \(z(0) = (1/2,1/2,1/2)^*\) and a range of disturbances are shown in Fig. 1.

\(\left\| z(t) - z^\dagger \right\| _2\) for different disturbances: \(d^0(t) = 0\), \(d^1(t) = (|\sin (t)|, |\sin (\sqrt{2}t)|, |\sin (\pi t)|)^*\), \(d^2(t) = \frac{1}{2} d^1(t)\), \(d^3(t) = \frac{1}{4} d^1(t)\), \(d^4(t) = \frac{1}{8} d^1(t)\)
Finally, to conclude the example, we mention that the above arguments establishing ISS also show that, if (3.22) holds, then, for all \(z(0)\in \mathbb {R}_+^3\) and all disturbances \(d\in L^\infty (\mathbb {R}_+,\mathbb {R}^3)\), possibly negative-valued, such that
the solution z of (3.19) remains in the non-negative orthant for all times (or, equivalently, does not “escape” from the non-negative orthant in finite time). For example, if \(\psi (\Vert z(0)-z^\dagger \Vert ,0)\le \mu /2\), then the solution z of (3.19) stays in \(\mathbb {R}_+^3\) for all times in the presence of componentwise negative disturbances d satisfying \(\varphi (\Vert d\Vert _{L^\infty (0,\infty )})\le \mu /2\).
\(\square \)
Example 3.5 is a single-input single-output system in the sense that \(m=p=1\). In the following example, we consider a system with \(m=2\) and \(p=4\).
Example 3.6
Consider \((A, B, B_\mathrm{e}, C) \in \Sigma _\mathrm{e}\), where
and \(B_\mathrm{e} \in \mathbb {R}^{4 \times m_e}\), \(B_\mathrm{e}\not =0\), is arbitrary. It is obvious that A is not Hurwitz and thus, the transfer function G of the minimal triple (A, B, C) is not in \(H^{\infty }(\mathbb {C}^{4\times 2})\). A MATLAB calculation reveals that,
is a stabilizing output feedback matrix and we have \(\left\| G^K\right\| _{H^{\infty }} = 3.8383\). Therefore, by Lemma 2.1, there exists \(r>1/4\) (for example, \(r=10/39\)) such that \(\mathbb {B}_{\mathbb {C}}(K,r) \subseteq \mathbb {S}_{\mathbb {C}} \left( G\right) = \mathbb {S}_{\mathbb {C}} \left( A, B, C\right) \). Invoking Theorem 3.2, we conclude that the Lur’e system \((A, B, B_\mathrm{e}, C, f)\) is ISS for every locally Lipschitz \(f:\mathbb {R}^4\rightarrow \mathbb {R}^2\) such that
To provide a specific example satisfying (3.27), consider the function \(f:\mathbb {R}^4\rightarrow \mathbb {R}^2\) given by
where \(g:\mathbb {R}^4\rightarrow \mathbb {R}\) is locally Lipschitz and such that \(|g(\xi )|\le \Vert \xi \Vert \) for all \(\xi \in \mathbb {R}^4\). Then
implying that the Lur’e system \((A, B, B_\mathrm{e}, C, f)\) is ISS. \(\square \)
Theorem 3.2 says, roughly speaking, that linear stability (namely, \(\mathbb {B}_{\mathbb {C}}(K, r) \subseteq \mathbb {S}_{\mathbb {C}} \left( A,B,C\right) \)) implies ISS for all nonlinearities \(f:\mathbb {R}^p\rightarrow \mathbb {R}^m\) satisfying (3.3). In this sense, Theorem 3.2 is reminiscent of the Aizerman conjecture, see, for example [9, 10, 17, 27]. We emphasize though that stability of the linear feedback system \(\dot{x}=(A+BFC)x\) has to hold for all complex output feedback matrices F satisfying \(\Vert F-K\Vert <r\). It is easy to see that the ISS conclusion in Theorem 3.2 remains true for all complex nonlinearities \(f:\mathbb {C}^p\rightarrow \mathbb {C}^m\) satisfying (3.3) for all \(\xi \in \mathbb {C}^p\). We will now identify a special case wherein the complex condition \(\mathbb {B}_{\mathbb {C}}(K, r) \subseteq \mathbb {S}_{\mathbb {C}} \left( A,B,C\right) \) can be replaced by its real counterpart \(\mathbb {B}_{\mathbb {R}}(K,r)\subseteq \mathbb {S}_{\mathbb {R}}(A,B,C)\).
Recall that a square matrix \(M\in \mathbb {R}^{n\times n}\) is said to be Metzler (or essentially non-negative or quasi positive) if all its off-diagonal entries are non-negative. It is well known (and straightforward to prove) that \(M\in \mathbb {R}^{n\times n}\) is Metzler if, and only if, \(e^{Mt}\zeta \in \mathbb {R}^n_+\) for all \(\zeta \in \mathbb {R}^n_+\) and all \(t\ge 0\). We say that a matrix with real entries is non-negative if all its entries are non-negative.
Corollary 3.7
Let \((A, B, B_\mathrm{e}, C)\in \Sigma _\mathrm{e}\), \(f:\mathbb {R}^p\rightarrow \mathbb {R}^m\) be locally Lipschitz, \(r > 0\) and \(K \in \mathbb {R}^{m \times p}\). Assume that B and C are non-negative and \(A+BKC\) is Metzler. If \(\mathbb {B}_{\mathbb {R}}(K, r)\subseteq \mathbb {S}_{\mathbb {R}}(A,B,C)\) and there exists \(\alpha \in \mathcal {K}_{\infty }\) such that
then the Lur’e system \((A, B, B_\mathrm{e}, C,f)\) is ISS.
Proof
By hypothesis, B and C are non-negative and \(A_K:=A+BKC\) is Metzler. Since \(\mathbb {B}_{\mathbb {R}}(K, r)\subseteq \mathbb {S}_{\mathbb {R}}(A,B,C)\), we have \(\mathbb {B}_{\mathbb {R}}(0, r)\subseteq \mathbb {S}_{\mathbb {R}}(A_K,B,C)\), and thus, \(r\le r_{\mathbb {R}}(A_K;B,C)\). By a stability radius result for non-negative systems proved in [11], \(r_{\mathbb {R}}(A_K;B,C)=r_{\mathbb {C}}(A_K;B,C)\), and hence, \(\mathbb {B}_{\mathbb {C}}(0, r)\subseteq \mathbb {S}_{\mathbb {C}}(A_K,B,C)\), or, equivalently, \(\mathbb {B}_{\mathbb {C}}(K, r)\subseteq \mathbb {S}_{\mathbb {C}}(A,B,C)\). The claim now follows from Theorem 3.2. \(\square \)
The corollary below provides a “small-gain” interpretation of Theorem 3.2.
Corollary 3.8
Let \((A, B, B_\mathrm{e}, C)\in \Sigma _\mathrm{e}\), \(K\in \mathbb {S}_\mathbb {R}(A,B.C)\), let \(f:\mathbb {R}^p\rightarrow \mathbb {R}^m\) be locally Lipschitz and let G denote the transfer function of (A, B, C). If there exists \(\alpha \in \mathcal {K}_{\infty }\) such that
then the Lur’e system \((A, B, B_\mathrm{e}, C, f)\) is ISS.
Proof
Setting \(r:=1/\Vert G^K\Vert _{H^\infty }\), it follows that \(\mathbb {B}_{\mathbb {C}}(K, r)\subseteq \mathbb {S}_{\mathbb {C}}(A,B,C)\) and an application of Theorem 3.2 yields the claim. \(\square \)
We note that Corollary 3.8 is not a special case of general nonlinear small-gain ISS results as can be found, for example, in [14, 26]. The reason for this is that, in general, the \(H^\infty \)-gain \(\Vert G^K\Vert _{H^\infty }\) and the ISS gain of the linear system \((A+BKC,B,C)\) do not coincide: the former is always less or equal to the latter and the difference between these two gains can be large.
Next we derive a version of Theorem 3.2 which is reminiscent of the well-known circle criterion (see [6, 7, 16, 27]). To this end, let \(\mathbb {R}(s)\) denote the field of real rational functions, and recall that \(H\in \mathbb {R}(s)^{m\times m}\) is said to be positive real if for every \(s\in \mathbb {C}_+\) which is not a pole of H, the matrix \(H^*(s)+ H(s)\) is positive semi-definite.
For convenience, we state the following well-known lemma.
Lemma 3.9
Let \(H\in \mathbb {R}(s)^{m\times m}\). If H is positive real, then H does not have any poles in \(\mathbb {C}_+\), \(-1\) is not an eigenvalue of H(s) for every \(s\in \mathbb {C}_+\) and
We are now in the position to state and prove a corollary of Theorem 3.2 which shows that, under conditions very similar to those of the circle criterion, the Lur’e system \((A, B, B_\mathrm{e}, C, f)\) is ISS.
Corollary 3.10
Let \((A, B, B_\mathrm{e}, C)\in \Sigma _\mathrm{e}\), \(f:\mathbb {R}^p\rightarrow \mathbb {R}^m\) be locally Lipschitz, \(K_1, K_2 \in \mathbb {R}^{m \times p}\) and let G denote the transfer function of (A, B, C). Assume that (A, B, C) is stabilizable and detectable and that \((I - K_2G)(I - K_1G)^{-1}\) is positive real. If there exists \(\alpha \in \mathcal {K}_{\infty }\) such that
then the Lur’e system \((A, B, B_\mathrm{e}, C, f)\) is ISS.
Proof
Setting
we rewrite the left-hand side of the sector condition (3.29) in terms of K and L:
Note that in conjunction with (3.29) this implies \(\ker L = \{0\}\). Thus \(L^*L\) is invertible and \(L^{\sharp } := (L^*L)^{-1}L^* \in \mathbb {R}^{p \times m}\) is a left inverse of L. Furthermore,
showing that \(I + 2LG^{K_1}\) is positive real. Thus, by Lemma 3.9,
Trivially,
and so, appealing to statement (d) of Lemma 2.1,
By stabilizability and detectability of (A, B, C) and left invertibility of L, it follows that \((A_{K_1}, B, LC)\) is stabilizable and detectable, where \(A_{K_1}:=A+BK_1C\). The transfer function of \((A_{K_1}, B, LC)\) is equal to \(LG^{K_1}\) and so (3.31) implies
Defining \(g:\mathbb {R}^m\rightarrow \mathbb {R}^m\) by \(g(\xi ):=f(L^{\sharp }\xi ) - K_1L^{\sharp }\xi \) for all \(\xi \in \mathbb {R}^m\), it is straightforward to show that
We claim that it is sufficient to prove that there exists \(\beta \in \mathcal {K}_{\infty }\) such that
Indeed, if (3.34) holds, then it follows from (3.32) and an application of Theorem 3.2 that \((A_{K_1}, B, B_\mathrm{e}, LC, g)\) is ISS, and consequently, by (3.33), the Lur’e system \((A,B,B_\mathrm{e}, C,f)\) is also ISS.
We proceed to establish the existence of a function \(\beta \in \mathcal {K}_{\infty }\) such that (3.34) holds. To this end, note that
In conjunction with (3.29) and (3.30) this leads to
Let \(\xi \in \mathbb {R}^m\) and decompose \(\xi =\xi _1+\xi _2\), where
Then \(\Vert LL^\sharp \xi \Vert =\Vert LL^\sharp \xi _1\Vert =\Vert \xi _1\Vert \). Moreover, there exists \(c>0\) such that
It follows that
Defining \(\beta \in \mathcal {K}_{\infty }\) by
we have that
Now
and thus, by (3.36),
This, in combination with (3.35), yields
showing that (3.34) holds and completing the proof. \(\square \)
We recall that \(H\in \mathbb {R}(s)^{m\times m}\) is said to be strictly positive real if there exists \(\varepsilon >0\) such that the rational matrix function \(s\mapsto H(s-\varepsilon )\) is positive real.
Corollary 3.11
Let \((A, B, B_\mathrm{e}, C)\in \Sigma _\mathrm{e}\), \(f:\mathbb {R}^p\rightarrow \mathbb {R}^m\) be locally Lipschitz, let G denote the transfer function of (A, B, C), and let \(K_1, K_2 \in \mathbb {R}^{m \times p}\) be such that \(\ker (K_1-K_2)=\{0\}\). If (A, B, C) is stabilizable and detectable, \((I - K_2G)(I - K_1G)^{-1}\) is strictly positive real and
then the Lur’e system \((A, B, B_\mathrm{e}, C, f)\) is ISS.
Note that the assumptions in Corollary 3.11 are identical to those imposed in the “classical” circle criterion which guarantees global asymptotic stability, see, for example, [6, Theorem 5.1], [7, Corollary 5.8] and [16, Theorem 7.1].Footnote 2 Interestingly, Corollary 3.11 shows that the conditions of the circle criterion are actually sufficient for ISS. Also note that if \(\ker (K_1-K_2)\) is non-trivial, then, in general, Corollary 3.11 does not hold: indeed, if \(F\in \mathbb {R}^{m \times p}\) is such that \(G(I - FG)^{-1}\not \in H^\infty (\mathbb {C}^{p\times m})\) (that is, the feedback gain F is not stabilizing), \(f(\xi )=F\xi \) and \(K_1=K_2=F\), then \((I - K_2G)(I - K_1G)^{-1}=I\) is trivially strictly positive real and (3.37) is satisfied, but 0 is not an asymptotically stable equilibrium of the (uncontrolled) Lur’e system.
The following lemma will be useful in the proof of Corollary 3.11.
Lemma 3.12
Let \(H\in \mathbb {R}(s)^{m\times m}\) be proper and assume that \(H(\infty )+ H^*(\infty )\) is positive definite. Then H is strictly positive real if, and only if, \(H\in H^\infty (\mathbb {C}^{m\times m})\) and \(H(i\omega )+H^*(i\omega )\) is positive definite for all \(\omega \in \mathbb {R}\).
The above lemma is an immediate consequence of a standard characterization of the strict positive real property, see, for example [7, Theorem 5.17] or [16, Lemma 6.1].
Proof of Corollary 3.11
Set \(M:=K_2-K_1\), let \(\rho \ge 0\) and define
By hypothesis, \(H_0\) is strictly positive real. We claim that that there exists \(\hat{\rho }>0\) such that \(H_\rho \) is strictly positive real for all \(\rho \in [0,\hat{\rho }]\). To this end, note that
Since \(H_0\) is strictly positive real, Lemma 3.12 yields that \(H_0\in H^\infty (\mathbb {C}^{m\times m})\) and, furthermore, there exists \(\delta >0\) such that
Since \(\ker M=\{0\}\), the matrix M is left invertible, and it follows from (3.38) (with \(\rho =0\)) that \(G(I - K_1G)^{-1}\in H^\infty (\mathbb {C}^{p\times m})\). Consequently, there exists \(\tilde{\rho }>0\) such that \(G\big (I - (K_1-\rho M)G\big )^{-1} \in H^\infty (\mathbb {C}^{p\times m})\) for all \(\rho \in [0,\tilde{\rho }]\) and the map
is continuous. Invoking (3.39), we conclude that there exists \(\hat{\rho }\in (0,\tilde{\rho }]\) such that, for each \(\rho \in [0,\hat{\rho }]\), \(H_\rho (i\omega )+H_\rho ^*(i\omega )\ge (\delta /2)I\) for all \(\omega \in \mathbb {R}\). An application of Lemma 3.12 shows that, for all \(\rho \in [0,\hat{\rho }]\), \(H_\rho \) is strictly positive real and, a fortiori, positive real.
The claim will follow from Corollary 3.10, provided we can show that, for \(\rho \in (0,\hat{\rho }]\), there exists \(\alpha \in \mathcal {K}_{\infty }\) such that
Invoking (3.37), a straightforward calculation shows that
By left invertibility of M, there exists \(\mu >0\) such that \(\Vert M\xi \Vert \ge \mu \Vert \xi \Vert \) for all \(\xi \in \mathbb {R}^p\), and so,
showing that (3.40) holds with \(\alpha (s)=\mu \rho (\rho +1)s\). \(\square \)
We now reformulate the sector condition (3.29) in the special case wherein (A, B, C) is a single-input single-output system (that is, \(m=p=1\)). In the single-input single-output setting, this reformulation seems more natural than (3.29).
Corollary 3.13
Let \((A, B, B_\mathrm{e}, C)\in \Sigma _\mathrm{e}\), where (A, B, C) is a single-input single-output system (that is, \(m=p=1\)). Let \(f:\mathbb {R}\rightarrow \mathbb {R}\) be locally Lipschitz, let \(k_1<k_2\) and let G denote the transfer function of (A, B, C). Assume that (A, B, C) is stabilizable and detectable and that \((1-k_2G)/(I - k_1G)\) is positive real. If there exists \(\alpha \in \mathcal {K}_{\infty }\) such that
then the Lur’e system \((A, B, B_\mathrm{e}, C, f)\) is ISS.
Note that there exists \(\alpha \in \mathcal {K}_{\infty }\) such that (3.41) holds if, and only if,
and
Proof of Corollary 3.13
The result will follow from Corollary 3.10, provided we show that there exists \(\beta \in \mathcal {K}_{\infty }\) such that
To this end, set
and note that, by (3.41),
or, equivalently,
Hence,
Since
and \(k^2-r^2=k_1k_2\), it follows that
Finally, by (3.43), \(\alpha (s)\le rs\) for all \(s\ge 0\), implying that
Consequently, (3.42) holds with \(\beta :=r\alpha \). \(\square \)
Example 3.14
Consider the one-dimensional linear system \(\dot{x}=u+v\) with feedback \(u=f(x)\), resulting in the Lur’e system
Here we have \((A,B,B_\mathrm{e},C)=(0,1,1,1)\) and \(G(s)=1/s\). Let \(k_1<0\) and \(k_2=0\). Note that, for every \(k_1<0\),
is positive real (but not strictly positive real). Let f be given by
It is clear that, for any \(k_1<-1\), \(k_1\xi ^2<f(\xi )\xi <0\) for all \(\xi \not =0\), and, as \(|\xi |\rightarrow \infty \), we have that \(|f(\xi )-k_1\xi |\rightarrow \infty \) and \(|f(\xi )|\rightarrow \infty \). Consequently, there exists \(\alpha \in \mathcal {K}_{\infty }\) such that
It follows now from Corollary 3.13 that the Lur’e system (3.44) is ISS. Note that the equilibrium 0 of the uncontrolled (\(v=0\)) system (3.44) is not exponentially stable. Also note that if f is replaced by a saturating nonlinearity g, for example,
then, by Proposition 3.4, the resulting Lur’e system is not ISS. \(\square \)
4 Conclusions
We have developed an ISS theory for a class of Lur’e systems. The main result of this paper (Theorem 3.2) is an ISS result which is reminiscent of the complexified Aizerman conjecture in the following sense: if every linear feedback gain F in the complex ball \(\mathbb {B}_{\mathbb {C}}(K,r)\) stabilizes the system (A, B, C), then the Lur’s system \(\dot{x}=Ax+Bf(Cx)+B_\mathrm{e}v\) is ISS for every locally Lipschitz nonlinearity f for which there exists \(\alpha \in \mathcal {K}_{\infty }\) such that \(\Vert f(\xi )-K\xi \Vert \le r\Vert \xi \Vert - \alpha (\Vert \xi \Vert )\) for all \(\xi \). As corollaries we have obtained a new nonlinear small-gain condition for ISS of Lur’e systems (Corollary 3.8) and several ISS versions of the classical circle criterion (Corollaries 3.10, 3.11 and 3.13).
Notes
For example, using the notation of [4], we have \(\gamma _{11}=\gamma _{12}=\gamma _{22}=\gamma _{23}= \gamma _{31}=\gamma _{33}=0\),
$$\begin{aligned} \gamma _{13}(s)=\frac{s}{a_1(1+\xi ^\dagger )},\quad \gamma _{21}(s)= \frac{s}{a_2}\quad \text{ and }\quad \gamma _{32}(s)=\frac{s}{a_3}, \end{aligned}$$and defining \(\alpha _i(s)=\varepsilon _i s\), where \(\varepsilon _1\), \(\varepsilon _2\) and \(\varepsilon _3\) are positive numbers such that \((1+\varepsilon _1)(1+\varepsilon _2)(1+\varepsilon _3)<r(1+\xi ^\dagger )\), it follows from [4, Theorem 11] that (3.26) is ISS, provided that \(r>1/2\).
Whilst in these results it is assumed that the linear system (A, B, C) is controllable and observable, Corollary 3.11 requires only stabilizability and detectability.
References
Arcak M, Teel A (2002) Input-to-state stability for a class of Lurie systems. Automatica 38:1945–1949
de Bruin JCA, Doris A, van de Wouw N, Heemels WPMH, Nijmeijer H (2009) Control of mechanical motion systems with non-collocation of actuation and friction: a Popov criterion approach for input-to-state stability and set-valued nonlinearities. Automatica 45:405–415
Dashkovskiy SN, Efimov DV, Sontag ED (2011) Input-to-state stability and allied system properties. Autom Remote Control 72:1579–1614
Dashkovskiy SN, Rüffer BS, Wirth FR (2007) An ISS small gain theorem for general networks. Math Control Signals Syst 19:93–122
Dashkovskiy SN, Rüffer BS, Wirth FR (2010) Small gain theorems for large scale systems and construction of ISS Lyapunov functions. SIAM J Control Optim 48:4089–4118
Haddad WM, Bernstein DS (1993) Explicit construction of quadratic Lyapunov functions for the small gain, positivity, circle, and Popov theorems and their application to robust stability (part I: continuous-time theory). Int J Robust Nonlinear Control 3:313–339
Haddad WM, Chellaboina V (2008) Nonlinear dynamical systems and control. Princeton University Press, Princeton
Hinrichsen D, Pritchard AJ (1986) Stability radius for structured perturbations and the algebraic Riccati equation. Syst Control Lett 8:105–113
Hinrichsen D, Pritchard AJ (1995) Destabilization by output feedback. Differ Integral Equ 5:357–386
Hinrichsen D, Pritchard AJ (2005) Mathematical systems theory I. Springer, Berlin
Hinrichsen D, Son NK (1996) Robust stability of positive continuous-time systems. Numer Funct Anal Optim 17:649–659
Jayawardhana B, Logemann H, Ryan EP (2009) Input-to-state stability of differential inclusions with applications to hysteretic and quantized feedback systems. SIAM J Control Optim 48:1031–1054
Jayawardhana B, Logemann H, Ryan EP (2011) The circle criterion and input-to-state stability: new perspectives on a classical result. IEEE Control Syst Mag 31:32–67
Jiang ZP, Teel AR, Praly L (1994) Small-gain theorem for ISS systems and applications. Math Control Signals Syst 7:95–120
Kellet CM (2014) A compendium of comparison function results. Math Control Signals Syst 26:339–374
Khalil HK (2002) Nonlinear systems, 3rd edn. Prentice-Hall, Upper Saddle River, NJ
Leonov GA (2001) Mathematical problems of control theory. World Scientific, Singapore
Leonov GA, Kuznetsov NV, Bragin VO (2010) On problems of Aizerman and Kalman. Vestnik St Petersburg Univ Math 43:148–162
Liberzon MR (2006) Essays on absolute stability theory. Autom Remote Control 67:1610–1644
Liu W, Chitour Y, Sontag E (1996) On finite-gain stabilizability of linear systems subject to input saturation. SIAM J Control Optim 34:1190–1219
Murray JD (2002) Mathematical biology I, 3rd edn. Springer-Verlag, New York
Sarkans E, Logemann H Input-to-state stability for discrete-time Lur’e systems (2015, preprint)
Sontag ED (1989) Smooth stabilization implies coprime factorization. IEEE Trans Autom Control 34:435–443
Sontag ED (1998) Comments on integral variants of ISS. Syst Control Lett 34:93–100
Sontag ED (2006) Input to state stability: basic concepts and results. In: Nistri P, Stefani G (eds) Nonlinear and optimal control theory. Springer-Verlag, Berlin, pp 163–220
Sontag ED, Ingalls B (2002) A small-gain theorem with applications to input/output systems, incremental stability, detectability, and interconnections. J Frankl Inst 339:211–229
Vidyasagar M (1993) Nonlinear systems analysis, 2nd edn. Prentice-Hall, Englewood Cliffs, NJ
Yakubovich VA, Leonov GA, Gelig AKh (2004) Stability of stationary sets in control systems with discontinuous nonlinearities. World Scientific, Singapore
Author information
Authors and Affiliations
Corresponding author
Additional information
The research by H. Logemann was supported by EPSRC (Grant EP/I019456/1).
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Sarkans, E., Logemann, H. Input-to-state stability of Lur’e systems. Math. Control Signals Syst. 27, 439–465 (2015). https://doi.org/10.1007/s00498-015-0147-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00498-015-0147-0