
Abstract
A Trace-Finite-Cell-Method for the numerical analysis of thin shells is presented combining concepts of the TraceFEM and the Finite-Cell-Method. As an underlying shell model we use the Koiter model, which we re-derive in strong form based on first principles of continuum mechanics by recasting well-known relations formulated in local coordinates to a formulation independent of a parametrization. The field approximation is constructed by restricting shape functions defined on a structured background grid on the shell surface. As shape functions we use on a background grid the tensor product of cubic splines. This yields \(C^1\)-continuous approximation spaces, which are required by the governing equations of fourth order. The parametrization-free formulation allows a natural implementation of the proposed method and manufactured solutions on arbitrary geometries for code verification. Thus, the implementation is verified by a convergence analysis where the error is computed with an exact manufactured solution. Furthermore, benchmark tests are investigated.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Due to their superior load-carrying capabilities, the mechanical analysis of shells is of great interest in engineering. A large literature body exists on the formulation of shell models. We refer to [8, 34, 41] and references therein for an overview. In the present paper, we consider the classical Koiter model [14, 32], which is one of the most popular models for thin shells. The Koiter shell model has been justified by asymptotic analysis in [15], in the sense of being a reasonable approximation to the full 3D problem of a thin shell-like body. Existence and uniqueness results can be found in [9, 14].
Classically, for theoretical treatment it is assumed that the shell mid-surface is represented by a global parametrization. However, for the numerical treatment typically the mid-surface is approximated by, possibly curved, finite elements, i.e. represented by a collection of local parametrizations. In contrast to these representations, we consider the case where the mid-surface is represented implicitly as the zero-level set of a scalar function \(\phi ({{\mathbf {x}}})\), see Fig. 1 for the illustration of some examples. We refer to the review article [21] for an overview of finite element methods for problems on such surfaces. In the classical surface finite element method the discretization of the unknown field relies on the higher order or exact meshing (local parametrization) of the surface [19, 26]. In contrast to this, in the proposed method the discretization of the displacement field does not rely on parametrizations. Therefore, we provide a throughout derivation of the governing equations in strong form based on first principles of continuum mechanics independent of a parametrization. This allows a natural implementation of the method and also the construction of manufactured solutions for code verification on arbitrary geometries. Equivalent derivations relying on a parametrization can be found in e.g. [3] and [45]. We remark that membrane and equivalent thin shell formulations without relying on a parametrization with a mathematical focus can be found in [18, 28]. For a treatment from an engineering perspective we refer to [39, 48]. However, in [39] only the weak formulation is reformulated in a parametrization free way and no strong form is given. Although in [48] both the strong and the weak forms are provided, no derivations/ proofs are presented. Furthermore, in the author’s opinion, the notation used in the present paper is more direct and thus traceable.

Examples of implicitly defined surfaces. The surfaces are defined by the level-set functions a \(\phi =x^2+y^2+\) \( z^2-r^2, \mathbf{b} \phi = (x^2+y^2+z^2+R^2-r^2)^2- 4R^2(x^2+y^2)\), c \(\phi = x^2+y^2 - r^2\), d \(\phi = \sin x\cos y+\sin y\cos z+\sin z\cos x\)
One of the main difficulties in developing finite element methods for thin shells is the construction of \(C^1\)-continuous approximation spaces. For general unstructured meshes it is not possible to ensure \(C^1\)-continuity with only local polynomial shape functions and the nodal degrees of freedom consist of displacements and slopes only [49]. However, different non-standard triangular elements developed for thin plate bending are the Argyris element [2, 20], the Bell element [5] or the Clough-Tocher macrotriangle [17]. A further possibility to construct \(C^1\)-continuous approximation spaces on general space triangulation relies on sophisticated techniques from subdivision surfaces [16]. However, on a structured quadrilateral mesh the Bogner-Fox-Schmit element [10] is a simple conforming element. The constraint of a structured quadrilateral mesh can be partially overcome by introducing a smooth mapping of the geometry [24]. This idea can be realized in an isoparametric way by the use of splines for the geometry mapping and for the discretization of the displacement field [31]. The general difficulty of constructing \(C^1\)-continuous approximation spaces led to approaches where the \(C^1\)-continuity requirement is circumvented. Among them we mention discrete Kirchhoff elements [1, 4] where the Kirchhoff constraint is enforced only at discrete points, the use of shear-deformable (Reissner-Mindlin) shell theory, were only \(C^0\)-continuity approximation spaces are required, mixed methods [35, 43], continuous/discontinuous Galerkin methods [23, 29] and others.
In the present paper, we combine ideas from unfitted finite element methods and the Bogner-Fox-Schmit element. Following the idea of the TraceFEM [36, 37] (see also CutFEM [11, 13]) the approximation of the displacement field is constructed by restricting shape functions defined on a background mesh on the shell surface. In particular, we follow the idea of the Finite-Cell-Method [40, 47] and use a structured grid where the simple tensor product of three uni-variant cubic spline shape functions leads to a \(C^1\)-continuous approximation in 3D (like the Bogner-Fox-Schmit element in 2D). Therefore, the shape functions for approximation of the displacement field on the shell mid-surface are \(C^1\)-continuous. We remark that cut Bogner-Fox-Schmit elements for thin plates were proposed and analyzed in [12]. Therefore, the proposed method can be seen as an extension of the work [12] from plates to curved shells.
One challenge in unfitted finite element methods is the efficient integration on the problem domain [38]. During the preparation of the present paper it turned out that due to a growing number of constraints for finer meshes the strategy developed in [25] is not applicable in the present situation. Therefore, we have implemented the quadrature strategy developed in [46].
The implementation of the proposed method is verified by a convergence analysis where the error is computed with an exact manufactured solution. Furthermore, the capabilities of the method are shown in two standard and two non-standard benchmark tests.
2 Notation and geometric preliminaries

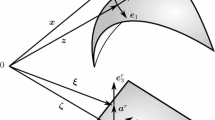
Illustration and notation of the geometric setting
The underlying assumption in shell analysis is that the computational domain has a small extension with respect to one coordinate. Thus, we assume that it is located around a two-dimensional mid-surface \(\varOmega \) which is embedded in \({\mathbb {R}}^3\). In the present paper we assume that the mid-surface is defined implicitly as the zero-level set of a function \(\phi : {\mathbb {R}}^3 \rightarrow {\mathbb {R}}\) inside a cuboid \(B\subset {\mathbb {R}}^3\),
The boundary of \(\varOmega \) is denoted \(\varGamma \), the surface normal vector is denoted by \(\pmb {\nu }\), and the normal vector tangential to the surface on a boundary point is denoted by \(\pmb \mu \), see Fig. 2. We assume that \(\varOmega \) is regular (smooth) such that
holds in the neighborhood of \(\varOmega \), where \(\nabla \) denotes the usual gradient of some scalar-valued function \(f:{\mathbb {R}}^3\rightarrow {\mathbb {R}}\),
with the Cartesian coordinates \({{\mathbf {x}}}= (x_1,x_2,x_3)\) and the standard Cartesian orthonormal basis \(\{{\mathbf {e}}^1,\,{\mathbf {e}}^2,\,{\mathbf {e}}^3\}\). Here, and in the following, the Einstein summation convention applies. Whenever an index occurs once in an upper position and in a lower position we sum over this index, where Latin indices \(i,j,\dots \) take the values 1, 2, 3 whereas Greek indices \(\alpha , \beta ,\dots \) take the values 1, 2. Let \({\mathcal {T}}\) be some tensor space of the form \({\mathbb {R}}^3\otimes \dots \otimes {\mathbb {R}}^3\). In the following we also use the generalization of the gradient for scalar-valued functions (3) to tensor-valued functions \({{\mathbf {T}}}: {\mathbb {R}}^3 \rightarrow {\mathcal {T}}\),
2.1 Differential geometry of implicitly defined surfaces
Given a implicit representation (1) of the surface \(\varOmega \), we can compute the unit normal vector to the surface by
and are able to define the tangential projector,
Furthermore, the extended Weingarten map is given by
and the mean curvature H is defined as
2.2 Differential geometry of parametrized surfaces
We briefly review the differential geometry of parametrized surfaces. For details we refer to e.g. [14]. Although the mid-surface \(\varOmega \) is assumed to be given implicitly, at least a local parametric representation is guaranteed to exist by the implicit function theorem. This justifies to consider parametrizations \(\hat{{\mathfrak {g}}}:\;U\subset {\mathbb {R}}^2 \rightarrow \varOmega \) with the parameter domain \(U\) for theoretical considerations (see [21, Lemma 2.2]). Given the parametrization \(\hat{{\mathfrak {g}}}(\theta ^1,\theta ^2)\), we can define the two covariant base vectors \(\hat{{\mathbf {g}}}_\alpha := \frac{\partial \hat{{\mathfrak {g}}} }{\partial \theta ^\alpha } \), which span the tangent plane to \(\varOmega \). With the base vectors we can define the unit normal vector
and the covariant coefficients of the metric \(\hat{ G}_{\alpha \beta } = \hat{{\mathbf {g}}}_\alpha \, \cdot \, \hat{{\mathbf {g}}}_\beta \). The contravariant coefficients of the metric are given by \([\hat{ G}^{\alpha \beta }]=[\hat{ G}_{\alpha \beta }]^{-1}\), where \([\hat{ G}_{\alpha \beta }]\) is the coefficient matrix. The contravariant base vectors can then be computed by \({\hat{{\mathbf {g}}}}^\alpha = \hat{ G}^{\alpha \beta } \hat{{\mathbf {g}}}_\beta \). The covariant coefficients of the Weingarten map \({\hat{{\mathbf {H}}}}= {\hat{h}}_{\alpha \beta } \, \hat{{\mathbf {g}}}^\alpha \otimes \hat{{\mathbf {g}}}^\beta \) are given by
and obey the symmetry relation \({\hat{h}}_{\alpha \beta } = {\hat{h}}_{\beta \alpha }\). The mean curvature \({\hat{H}}\) is given by
Furthermore, the derivatives of the base vectors are given by
with the surface Christoffel symbols of the second kind defined by
Remark
In our notion a hat over a quantity refers to a dependency on the parametric coordinates \((\theta ^1,\theta ^2)\in U\), whereas no hat refers to a dependency on \({{\mathbf {x}}}\in {\mathbb {R}}^3\).
2.3 Relations between parameter space and embedding space
The field \({\hat{{\mathbf {u}}}}(\theta ^1,\theta ^2)\) defined on the parameter space is related to the field \({{\mathbf {u}}}({{\mathbf {x}}})\) defined on the embedding space \({\mathbb {R}}^3\) by
By applying the chain rule we find that the first and second derivatives are related by
and
Furthermore, we have the following relations summarized in the following lemma.
Lemma 1
The metric tensor \(\hat{{\mathbf {G}}}= \hat{ G}_{\alpha \beta } \,\hat{{\mathbf {g}}}^\alpha \otimes \hat{{\mathbf {g}}}^\beta = \hat{{\mathbf {g}}}_\alpha \otimes \hat{{\mathbf {g}}}^\alpha \) and the projector \({\mathbf {P}}\) are related by
For the Weingarten map we have the relation
The proof can be found in “Appendix A”.
2.4 Surface gradient
The surface gradient of a tensor-valued function represented with respect to parametric coordinates by the map \({\hat{\mathbf {f}}}:U\rightarrow {\mathcal {T}}\) is given by
Lemma 2
For the representation \({{\mathbf {f}}}:{\mathbb {R}}^3\rightarrow {\mathcal {T}}\) the surface gradient is given by
Proof
Using the relation between the projector and the metric tensor and (15) we have
\(\square \)
We remark that many definitions of the surface gradient found in literature apply only to a scalar field [21, 44]. If the surface gradient of a vector field is needed, a separate definition is given [28, 30, 48]. In contrast to this, (19) and (20) apply to tensors of arbitrary order.
2.5 Surface divergence
We define the surface divergence as the adjoint operator to the surface gradient [44]. Therefore, on an Riemannian manifold we have in local coordinates
where we use the notation \(\det \hat{{\mathbf {G}}}= \det ([\hat{ G}_{\alpha \beta }])\). The next lemma gives the simpler representation for the surface divergence in case of a surface embedded in \({\mathbb {R}}^3\).
Lemma 3
On a surface \(\varOmega \subset {\mathbb {R}}^3\) parametrized by \(\hat{{\mathfrak {g}}}:U\rightarrow \varOmega \) the surface divergence of a tensor-valued function represented by \(\hat{{\mathbf {T}}}:U\rightarrow {\mathcal {T}}\) is given by
Furthermore, for the representation \({{\mathbf {T}}}:{\mathbb {R}}^3\rightarrow {\mathcal {T}}\) we have
The proof can be found in “Appendix A”.
In the following lemma we collect product rules for the divergence operator [28].
Lemma 4
Let \({\mathbf {v}}\times {\mathbf {T}}\) be the cross product of a vector \({\mathbf {v}} = v_i {\mathbf {e}}^i\) and a second order tensor \({\mathbf {T}} = T_{lk} {\mathbf {e}}^l \otimes {\mathbf {e}}^k\) defined by
and \({\mathbf {V}} \cdot \!\!\times {\mathbf {T}}\) the scalar-cross product of two second order tensors \({\mathbf {V}} = V_{ij} {\mathbf {e}}^i \otimes {\mathbf {e}}^j\) and \({\mathbf {T}} = T_{lk} {\mathbf {e}}^l \otimes {\mathbf {e}}^k\) defined by
Then, the following product rules hold
The proof can be found in “Appendix A”.
2.6 Integral identities
For further use we introduce the surface divergence theorem for a tensor-valued function \({{\mathbf {T}}}\) [28]
Using (28) and (29), the integration by parts formula for a vector \({\mathbf {v}}\) and a second order tensor \({{\mathbf {T}}}\) reads [28]
3 The linear thin shell problem
In this section, we derive the governing equations of linear thin shells from first principles of continuum mechanics [3, 45]. Furthermore, we show the equivalence to the linear Koiter model formulated as a minimization problem.
3.1 Shell kinematics
The kinematics of the surface \(\varOmega \) is described by the change in metric tensor and the change in curvature tensor. In the present paper we focus on the linear theory and use the linearized change in metric tensor \({\hat{\pmb \gamma }}= {\hat{ \gamma }}_{\alpha \beta } \,\hat{{\mathbf {g}}}^\alpha \otimes \hat{{\mathbf {g}}}^\beta \) and the linearized change in curvature tensor \({\hat{\pmb \rho }}= {\hat{ \rho }}_{\alpha \beta } \,\hat{{\mathbf {g}}}^\alpha \otimes \hat{{\mathbf {g}}}^\beta \). The respective covariant components are given by [9, 14]
and
The next lemma establishes the representations for \({{\pmb \gamma }}= {\hat{\pmb \gamma }}\circ \hat{{\mathfrak {g}}}^{-1}\) and \({{\pmb \rho }}= {\hat{\pmb \rho }}\circ \hat{{\mathfrak {g}}}^{-1}\).
Lemma 5
For the linearized change in metric tensor we have the representation [28]
and for the linearized change in curvature tensor we have the representation
The proof can be found in “Appendix A”.
3.2 Stress and moment tensors
We define the traction vector \({\mathbf {t}}(\pmb \mu )\) on a cut defined by the boundary normal \(\pmb \mu \) tangential to the surface. Due to Cauchy’s theorem, we have the representation
with the stress tensor \(\pmb \sigma \). We decompose the stress tensor \(\pmb \sigma \) in a tangential and a normal part,
with the tangential stress tensor \({\mathbf {N}} = N^{\alpha \beta } {{\mathbf {g}}}_\alpha \otimes {{\mathbf {g}}}_\beta \) and the vector \({\mathbf {S}} = S^{\alpha } {{\mathbf {g}}}_\alpha \) related to transverse shear. Analogously, we have a moment vector \({\mathbf {m}}(\pmb \mu )\) on the cut defined by \(\pmb \mu \), which can be expressed as
with the tangential moment tensor \({\mathbf {M}}\).
3.3 Equilibrium of forces
The equilibrium of forces states that the sum of the resulting force of boundary traction and the resultant force from the surface loading vanishes,
Applying the surface divergence theorem (29) results in
Due to the fact that \(\varOmega \) is arbitrary, the local force equilibrium reads
3.4 Equilibrium of moments
The equilibrium of moments states that the sum of boundary moments, the moments of boundary tractions, and the moments due to surface loads vanishes,
The following lemma summarizes the consequences of the equilibrium of moments.
Lemma 6
For \({{\mathbf {T}}}= {T}_{ij} {\mathbf {e}}^i \otimes {\mathbf {e}}^j\) let \([{{\mathbf {T}}}]_{\times } = {T}_{ij}{\mathbf {e}}^i \times {\mathbf {e}}^j\). The equilibrium of moments is fulfilled if
and
The proof can be found in “Appendix A”.
The statement of Lemma 6 using local coordinates implied by a parametrization can also be found in [3, 45].
3.5 Constitutive equations
In the present paper we assume linear constitutive equations of the form
and
The fourth order elasticity tensor \({\mathcal {E}}\) is given by
where \({\bar{\lambda }}\) and \(\mu \) are the Lamé constants of the elastic material constituting the shell and \({\mathcal {P}}^s\) the symmetric part of the tangential fourth order identity tensor. The Lamé constants are related to the Young’s modulus E and Poisson’s ratio \(\nu \) by
The constitutive equations can also be written as
We remark that with (45) the condition (42) is fulfilled identically.
3.6 Weak form of the governing equations
The weak form of the governing equations is given by
where \({\mathbf {v}}\) are appropriate test functions, see “Appendix B”. The boundary conditions which can be prescribed are given by,
where \(u^D_i\) is a given displacement in the direction of \({\mathbf {e}}_i\), \(\omega _{t}\) and \(\omega _{\mu }\) are given rotations, \(N^N_i\) is a given force in the direction of \({\mathbf {e}}_i\), \(M^N_t\) and \(M^N_\mu \) are given moments. If \({\mathbf {u}}\) is prescribed on the boundary, the derivative along the boundary \(d_{\mathbf {t}} (\pmb {\nu }\cdot {\mathbf {u}} ) = \nabla _\varOmega (\pmb {\nu }\cdot {{\mathbf {u}}})\cdot {\mathbf {t}}\) is also prescribed [3]. Thus, in this case, only the normal derivative \(d_{\pmb \mu } (\pmb {\nu }\cdot {\mathbf {u}} ) = \nabla _\varOmega (\pmb {\nu }\cdot {{\mathbf {u}}})\cdot \pmb \mu \) can be independently prescribed by \(\omega _{\mu }\).
3.7 Equivalence to the Koiter model
In this section, the equivalence of the classical linear Koiter model [14, 32] and (49) is outlined. To this end, we define the energy functional
Then, the linear Koiter shell model reads: Find \({\mathbf {u}}\in {\mathcal {V}}\) such that
Since the variational equations of (51) are the equations given in (49) we have established the equivalence. Therefore, we conclude that the Koiter model proposed out of purely mechanical and geometrical intuitions can be derived from first principles of continuum mechanics.
4 \(C^1\)-Trace-Finite-Cell-Method
For the discretization of the weak form (49), we propose a \(C^1\)-continuity version of the TraceFEM. Following the TraceFEM concept the ansatz space on the surface is defined as the restriction (trace) of an outer ansatz space defined on a background mesh. We label the present method also a Finite-Cell method because we use as a background mesh a Cartesian grid. On this structured grid we are able to construct \(C^1\)-continuity shape functions by the tensor product of univariate cubic Hermite form functions. Locally, they are defined on the on the unit interval by (see Fig. 3)

Local univariate cubic Hermite form functions
The local functions (53) are pieced together to global \(C^1\) shape functions \(N^i({{\mathbf {x}}})\) by the standard finite element procedure of relating local degrees of freedom and global degrees of freedom. The degrees of freedom are the values and the first derivatives at the vertices of the background grid. Thus, at each vertex we have \(2^3=8\) degrees of freedom for the discretization of a scalar field and 24 degrees of freedom for the vector-valued displacement field. Thus, on a background cell we have 64 local form functions and 192 local degrees of freedom for the displacement field. We denote the vector-valued finite element space on the background grid by \(V_h\). Then, the discrete problem is given by: Find \({\mathbf {u}}_h \in V_h\) such that
holds for all \({\mathbf {w}}_h\in V_h\) and
holds for all \({\mathbf {v}}_h\) with \(M_h({\mathbf {v}}_h, {\mathbf {w}}_h)=0\) for all \({\mathbf {w}}_h \in V_h\). The linear and bi-linear forms are given by
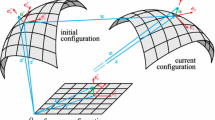
In (54a) the solution \({\mathbf {u}}_h\) gets fixed to prescribed values at the Dirichlet boundary. In (54b) the test functions \({\mathbf {v}}_h\) are restricted to the null-space of \(M_h\). However, the matrix \(M_h\) (and also \(K_h\)) is singular by definition because of two reasons. First, in order to avoid further notation, we take \({\mathbf {w}}_h\in V_h\) resulting in zero rows and columns, which can easily be identified. Secondly, since we define the shape functions by restriction of the shape functions defined on the background mesh, they are not linearly independent. In the standard setting of a fitted finite element method the respective degrees of freedom in (54a) are easy to identify and can be determined by interpolation. Here, in the case of an unfitted method a linear independent basis is not known explicitly in general and have to be determined. In order to illustrate the linear dependency of the basis functions on the surface we consider a simple example, see Fig. 4. For simplicity we investigate a two-dimensional background cell on which bi-linear shape functions are defined (instead of cubic Hermite functions (53)). In Fig. 4e a linear combination of basis functions is shown, which vanishes on the considered one-dimensional line \(\varOmega ^{1d}\). Therefore, the basis functions are not linearly independent on \(\varOmega ^{1d}\) and form only a frame (instead of a basis). We remark that this situation is different from the one in the Finite-Cell-Method for volume problems. There, the basis functions are linearly independent, however the condition number blows up for bad cut situations, see e.g. [42].

Illustration of the linear dependency of the basis functions. The 1D domain \(\varOmega ^{1d}\) in the 2D background cell \([0,1]^2\) is given by \(\phi (x,y) = 2y - 2x + 1\)(blue line): a–d bi-linear shape functions \(\varphi ^{lin}_1 \dots \varphi ^{lin}_4\) on the background cell, e linear combination of shape functions such that \(\varphi ^\star (x,y)=0\) for \((x,y)\in \varOmega ^{1d}\). (Color figure online)
In the discrete method the integrals in (55) are evaluated by quadrature, which is described in the next section.
4.1 Integral evaluation
In order to evaluate the surface and line integrals in (55) we use the quadrature schema developed in [46]. Here, we outline only the main ingredients and refer to [46] for technical details. Following the standard finite element procedure the integrals are evaluated by summing up background cell (face) contributions where the shape functions are smooth. The individual contributions are evaluated by Gaussian quadrature. The main idea from [46] is to subdivide the background cells (faces) until it is possible to convert the implicitly defined geometry into the graph of an implicitly defined height function. Then, a recursive algorithm which requires only one-dimensional root finding and one-dimensional Gaussian quadrature can be set up. In order to choose suitable height function directions we have to be able to ensure the monotonicity of the level-set function in that direction. This can be done by showing that the derivative in that direction is uniform in sign, i.e. place bounds on the values attainable by the derivative. In contrast to [46] we use interval arithmetic for this task.
4.2 Solution strategy and stabilization
In order to solve (54) we consider the null-space method with and without a stabilization term. We first solve
and compute the null-space of \(M_h\). We denote the null-space basis by \({\mathbf {Z}}_h\). In the approach without stabilization the solution \(u^0_h\) of
is computed. The overall solution is then given by
In the case of the stabilized method we replace \({\mathbf {K}}_h\) in (57) by \({\mathbf {K}}_h + {\mathbf {S}}_h\) where the stabilization matrix \({\mathbf {S}}_h\) results from the bi-linear form
with the stabilization parameter \(\alpha _S\) and Young’s modulus E. The stabilization in (59) is known as volume normal stabilization in thr literature [13, 27]. We refer to [36] for an overview of different stabilization possibilities.

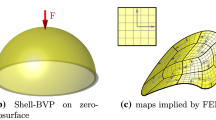
Problem geometries of the verification
4.3 Implementation
The proposed method has been implemented in Matlab. Within the method the exact level-set function \(\phi ({{\mathbf {x}}})\) is used. For the evaluation of the surface normal vector (5) and the Weingarten map (7), the first and second order derivatives of the level-set function are necessary. In the implementation we use symbolic differentiation of \(\phi ({{\mathbf {x}}})\) to provide these derivatives.
When no stabilization is used, in both system of Eqs. (56) and (57) the system matrix is singular by definition. In numerical experiments we have observed that the Matlab backslash operator does not give satisfactory results in this case. Therefore, we use the direct qr solver suitable for under-determined linear equation systems from the SuiteSparseFootnote 1 project in the non-stabilized method. In the stabilized method, i.e. when the stabilization (59) is used, the Matlab backslash operator can be used, provided the stabilization parameter is large enough.
5 Numerical results
In this section, numerical results are presented. First, we verify the implementation of the proposed method against exact manufactured solutions. Secondly, we demonstrate that the method works by testing it with two benchmark problems (one cylindrical shell and one spherical shell) of the well-known shell obstacle course [6]. Finally, in two more examples, complex shell geometries are investigated. All computations are performed on a personal computer with an AMD Ryzen 7 3700X 8-Core processor, which uses an Ubuntu 18.04 operating system.
5.1 Verification example
The implementation of the proposed method is verified. We have successfully run the method on various geometries, displacement fields and boundary condition combinations, but present only the results of two configurations. In all verification examples we used \(B=[-0.4,0.8]\times [0,1]\times [-0.3,1]\) and a shell thickness \(t=0.25\). The material parameters are \(E=10\) and \(\nu =0.4\). The considered geometries are defined by the zero level-set of the functions
and are illustrated in Fig. 5. The level-set function (60a) implies a flat geometry, whereas (60b) implies a surface with varying curvature.
As manufactured solutions we consider the two displacement fields
Using (40), we compute symbolically the necessary surface force \({\mathbf {b}}\) such that (61) is the respective exact solution of the shell problem. The displacement field \({\mathbf {u}}_1\) is chosen as a third order polynomial such that the solution can be represented exactly in the discrete space, whereas \({\mathbf {u}}_2\) can only be approximated.

Errors for the geometry induced by \(\phi _1\) and displacement \({\mathbf {u}}_1\)

Errors for the geometry induced by \(\phi _1\) and displacement \({\mathbf {u}}_2\)
In the following, we study the behavior of the error
under uniform mesh refinement for the non-stabilized method and the stabilized method described in Section 4.2. Furthermore, for comparison, we also consider the Hermite interpolation \({\mathbf {u}}^{int}_h\) of the solution on the background grid and the surface \(L_2\)-projection: Find \({\mathbf {u}}^{L_2}_h \in V_h\) such that
We remark that the Hermite interpolation and the \(L_2\)-projection are only possible if the solution is known, and is thus only computed for the verification examples in this section. Furthermore, all solutions apart from the Hermite interpolation require the solution of a system of linear equations. The numerical results for the flat plate defined in (60a) and displacement field \({\mathbf {u}}_1\) are visualized in Fig. 6. The refinement level 0 refers to a single background cell, whereas level 4 has 4096 background cells. We remark that for this flat geometry the numerical integration is exact up to round of errors. Therefore, for \({\mathbf {u}}_1\) the sources for errors are the error due to round off errors in the numerical computations. In Fig. 6a the error for different stabilization parameters is given. We observe that the optimal parameter choice depends on the discretization level. Furthermore, if the stabilization parameter is chosen too low, instabilities occur. In Fig. 6b the results for the different methods are given. For the results of the stabilized method the lowest error values from Fig. 6a are taken. As no system of equation has to be solved for the interpolation on the background grid (volume interpolation) the error is around \(10^{-16}\) for all refinement levels. In contrast to this the other results require the solution of a system of equations and therefore the errors are between \(10^{-8}\) and \(10^{-4}\) due to round off errors.

Errors for on the geometry induced by \(\phi _2\) for displacement \({\mathbf {u}}_2\)

Influence of the stabilization parameter on the condition number and the elapsed computation time
The numerical results for the flat geometry and displacement field \({\mathbf {u}}_2\) are visualized in Fig. 7. Since \({\mathbf {u}}_2\) cannot be represented exactly in the discrete space an approximation error limits the overall error. In Fig. 7a the error for different stabilization parameters is given. The results obtained by the different methods are illustrated in Fig. 7b. For the stabilized method we used the lowest errors of the results shown in Fig. 7a. For \({\mathbf {u}}_2\) we observe the convergence of all methods with optimal rate. Here, by definition the \(L_2\)-projection gives the lowest error, whereas the Hermite volume interpolation results in the highest error for a fixed refinement level. Here, we do not observe an influence of the stabilization.
We omit the results for the curved geometry and displacement field \({\mathbf {u}}_1\) field because they are similar to the results in Fig. 6 The numerical results for the part of the ellipse defined in (60b) and displacement field \({\mathbf {u}}_2\) are visualized in Fig. 8. In Fig. 8a the results for different stabilization parameters are given. We observe that \(\alpha _s \approx 10^{-10}\) yield the lowest errors. The results obtained by the non-stabilized method, the stabilized method, the Hermite volume interpolation and the \(L_2\)-projection are illustrated in Fig. 8b. Again, for the stabilized method we used the lowest errors of the results shown in Fig. 8a. We observe the convergence of all methods with optimal rate. Here, we observe that the stabilized method with optimal parameter choice yields the lowest errors. Furthermore, the influence of the stabilization on the condition number and on the elapsed computation time is illustrated in Fig. 9. However, we observe that the lowest condition numbers are obtained for a stabilization parameter around \(10^5\) in this example. Regarding the computation times we observe that larger stabilization parameters yield faster computations. For parameters \(\alpha _S<1\) the computation times for the non-stabilized method and the stabilized method are similar. Nonetheless, for \(\alpha _S>1\) the elapsed times are significantly lower.

Problem description of the Scordelis-Lo roof problem

Deformed configurations of the Scordelis-Lo roof (displacements scaled by a factor of 20)
5.2 Classical and modified Scordelis-Lo roof
We consider the classical Scordelis-Lo roof problem, which is one example from the shell obstacle course [6]. It is a popular benchmark test to assess the performance of finite elements regarding complex membrane strain states. Furthermore, a modified version of the problem with an re-entrant corner is considered. The cylindrical roof (radius \(r=25\), thickness \(t =0.25\)) is supported by rigid diaphragms at the ends (\(x=0\) and \(x=50\)), i.e. \(u_y=u_z=0\). The straight edges are free. The geometries are depicted in Fig. 10. We describe the classical problem geometry by
and \(B = [0,50] \times [-r\sin (\frac{40}{180}\pi ),r \sin (\frac{40}{180}\pi )]\times [10,31.25]\). For the modified roof problem we have extended the geometry description (1) slightly, such that background cells can be excluded from the analysis. This simple approach allows us to remove one quarter of the shell surface. The material parameters are \(E =4.32 \cdot 10^8\) and \(\nu =0\). The structure is subjected to gravity loading with \({\mathbf {b}}=-90\,{\mathbf {e}}_z\).

Problem description of the pinched hemisphere problem
For the classical roof, we study the vertical displacement of point A, which is located in the middle of one free edge. As a reference solution we use the overkill solution \(u_z^A = -0.3006\) from [7] obtained by an isogeometric formulation using fifth-order NURBS and a mesh of 48 control points in each direction. The results for different meshes obtained with the presented method are given in Table 1 and the deformed geometry is depicted in Fig. 11a. We observe that the method is able to reproduce the reference displacement found in the literature accurately. In this example we hardly see a effect of the stabilization (\(\alpha _s = 10^{-7}\)). Only on level 0 there is an slight difference in the displacement and no significant deviation in the computation times can be found.
For the modified roof, we study the vertical displacement of point B, which is located at the re-entrant corner. The results for different number of background cells are given in Table 2 and the deformed geometry is depicted in Fig. 11b. Basically, here the observations are the same as for the classical version. The stabilization has only little influence on the results and on the computation times. However, in contrast to the results in Table 1, no monotone convergence can be observed. We conjecture that this is due to a singularity at the re-entrant corner.
5.3 Pinched hemisphere
In this example, we consider the pinched hemisphere problem from the shell obstacle course in [6]. We describe the spherical mid-surface by
with \(R=10\) and \(B = [-12.5,12.5] \times [-12.5,12.5]\times [0,12.5]\). The material properties and the general problem setup are shown in Fig. 12. The edge of the hemisphere is unconstrained and the four radial forces have alternating signs such that the sum of the applied forces is zero. We investigate the radial displacement at the loaded points. In [6], the reference displacement of \(u_r = 0.0924\) is given. The results obtained by the presented methods are given in Table 3 and the deformed configuration is depicted in Fig. 13. We observe that the results are in very good agreement with the reference value found in literature. The chosen stabilization (\(\alpha _s=10^{-7}\)) reduces the accuracy only minimal. Regarding the computation times, no clear observation can be made. While the stabilization significantly increases the elapsed time for levels 3 and 4, the elapsed time for level 5 is only \(44\%\) in comparison with no stabilization.

Deformed configuration of the pinched hemisphere (displacements scaled by a factor of 40)
5.4 Gyroid
In this example, we consider the deformation of a shell structure with a complex geometry. The mid-surface is part of a gyroid which is given by the level-set function

Geometry of the gyroid problem. The structure is clamped at the gray plane
The considered shell lies in the cuboid \(B= [0,2]\times \) \([-0.5,0.5]\times \) \([-0.5,0.5]\). The geometry and the material parameters are depicted in Fig. 14. The shell structure is clamped at the boundary curve which is in the plane \(x=0\). We assume a thickness \(t= 0.03\). We study the vertical deflection due to a volume load \({\mathbf {b}}=-10^7 {\mathbf {e}}_z \, \) at the point \([2,0.5,-0.25]\). The deformed geometry is depicted in Fig. 15. The displacement results for different numbers of background cells are summarized in Table 4. We observe that the results obtained for levels 2, 3, and 4 with and without stabilization are nearly the same and that they are in good agreement with the reference displacement \(u_z = -1.8812\) given in [26]. We remark that the reference solution was obtained for a seven-parameter shell model including more physical effects and thus leading to a slightly larger displacement. Therefore, the deviation in the deflection is acceptable. However, for level 0 the result for the chosen stabilization (\(\alpha _s=10^{-7}\)) is unusable. Here, a larger stabilization parameter would be necessary. Nevertheless, the stabilized method is superior regarding computation times. On level 4 the elapsed time is only \(13\%\) in comparison with the non-stabilized method.

Deformed configuration of the gyroid

Undeformed and deformed configuration of the channel problem
5.5 Channel
In this last example we study the deformation of a channel. The construction consists of a cylindrical channel with spherical end-caps and a cylindrical downpipe (all radius \(R=0.2\)), see Fig. 16a. The geometry of the two cylinders and the two spheres is described by
In order to state the final level set function of the problem we introduce a smooth approximation of the min-function,
with a parameter k controlling the shape of the approximation. Furthermore, we introduce a combination of the horizontal cylinder and the spheres,
where \(H(\cdot )\) denotes the Heaviside-function. The geometry is now described by
and \(B= [-0.5,0.5]\times [-2,2]\times [-1,0]\). The material parameters are the same as in Section 5.4, whereas the shell thickness is \(t = 0.005\). Furthermore, the structure is fixed at the plane \(z=-1\). In this problem two loads are considered simultaneously. These are a volume load \({\mathbf {b}}=-10^7 {\mathbf {e}}_z \, \) and a concentrated load \({\mathbf {F}} = [10^4,0,0]\) acting at the point \([0,-1.7,0]\). The deformed geometry is depicted in Fig. 16b. We also evaluate the absolute value of the displacement at the force application point for different numbers of background cells. The results are given in Table 5. Regarding the displacement results the non-stabilized method delivers slightly more accurate results than the stabilized method. However, the computational times are significantly reduced for the stabilized method.
6 Conclusions
We have developed a \(C^1\)-continuous finite element method for thin shells with mid-surface given as the zero level-set of a scalar function. In order to achieve the continuity of the discretization, concepts of the TraceFEM and the Finite-Cell-Method are combined. In particular the shape functions on the shell surface are obtained by restriction of tensor-product cubic Hermite splines on a structured background mesh. In order to allow a natural implementation, the underlying shell model is formulated in a parametrization-free way. Furthermore, the strong form of the governing equations are given. This allows to obtain manufactured solutions on arbitrary geometries. Thus, the implementation of the proposed method is verified by a convergence analysis where the error is computed with an exact manufactured solution.
In the present method, the shape functions on the shell surface are linearly dependent. In order to avoid a singular system matrix, the so-called normal volume stabilization is used. Furthermore, also the singular system is solved by the direct qr-solver suitable for under-determined linear equation systems from the SuiteSparse project. In the numerical experiments we have observed that the non-stabilized and the stabilized method give reliable results, provided the stabilization parameter is large enough.
A major assumption in the present paper is that the surface is smooth (regular). Therefore, kinks within the shell surfaces are not allowed for the presented method. If one describes the geometry with a bunch of level set functions then they have to be smoothly connected. In future work, it would be interesting to extend the presented approach to geometries with sharp intersections of several surfaces.
In contrast to thin shells, for Reissner-Mindlin shells only \(C^0\)-continuous shape functions are commonly used. In order to avoid transverse shear locking, in [22, 33] an hierarchic concept of shell models is presented. This approach has the advantage that transverse shear locking is eliminated on the continuous formulation level, independent of a particular discretization, but requires \(C^1\)-continuous shape functions. An extension of the present work to Mindlin-Reissner shells with implicitly defined mid-surface seems possible and would be worth to investigate.
References
Areias PMA, Song JH, Belytschko T (2005) A finite-strain quadrilateral shell element based on discrete Kirchhoff-Love constraints. Int J Numer Methods Eng 64(9):1166–1206
Argyris JH, Fried I, Scharpf DW (1968) The TUBA family of plate elements for the matrix displacement method. Aeronaut J 72(692):701–709
Basar Y, Krätzig WB (1985) Mechanik der Flächentragwerke: Theorie, Berechnungsmethoden. Anwendungsbeispiele, Vieweg
Batoz JL, Zheng CL, Hammadi F (2001) Formulation and evaluation of new triangular, quadrilateral, pentagonal and hexagonal discrete Kirchhoff plate/shell elements. Int J Numer Methods Eng 52(5–6):615–630
Bell K (1969) A refined triangular plate bending finite element. Int J Numer Methods Eng 1(1):101–122
Belytschko T, Stolarski H, Liu WK, Carpenter N, Ong JS (1985) Stress projection for membrane and shear locking in shell finite elements. Comput Methods Appl Mech Eng 51(1):221–258
Bieber S, Oesterle B, Ramm E, Bischoff M (2018) A variational method to avoid locking - independent of the discretization scheme. Int J Numer Methods Eng 114(8):801–827
Bischoff M, Bletzinger KU, Wall W, Ramm E (2004) Models and finite elements for thin-walled structures. In: Stein E, de Borst R, Hughes T (eds) Encyclopedia of Comput Mech, vol. 2, chap. 3, pp 59–137. Wiley Online Library
Blouza A, Le Dret H (1999) Existence and uniqueness for the linear Koiter model for shells with little regularity. Q Appl Math 57(2):317–337
Bogner F (1965) The generation of interelement-compatible stiffness and mass matrices by the use of interpolation formulas. In: Proc Conf Matrix Meth Struct Mech, pp 397–443. Wright-Patterson AFB
Burman E, C S, Hansbo P, Larson M, Massing A (2015) CutFEM: Discretizing geometry and partial differential equations. Int J Numer Methods Eng 104(7):472–501
Burman E, Hansbo P, Larson MG (2020) Cut Bogner-Fox-Schmit elements for plates. Adv Model Simul Eng Sci 7(1):1–20
Burman E, Hansbo P, Larson MG, Massing A (2018) Cut finite element methods for partial differential equations on embedded manifolds of arbitrary codimensions. Math Model Numer Anal 52(6):2247–2282
Ciarlet PG (2006) An introduction to differential geometry with applications to elasticity, vol 78. Springer, New York
Ciarlet PG, Lods V (1996) Asymptotic analysis of linearly elastic shells. III. Justification of Koiter’s shell equations. Arch Ration Mech Anal 136(2):191–200
Cirak F, Ortiz M, Schröder P (2000) Subdivision surfaces: a new paradigm for thin-shell finite-element analysis. Int J Numer Methods Eng 47(12):2039–2072
Clough RW (1965) Finite element stiffness matricess for analysis of plate bending. In: Proc First Conf Matrix Methods Struct Mech, pp 515–546
Delfour MC, Zolésio JP (1997) Differential equations for linear shells: comparison between intrinsic and classical models. Adv Math Sci 25:41–124
Demlow A (2009) Higher-order finite element methods and pointwise error estimates for elliptic problems on surfaces. SIAM J Numer Anal 47(2):805–827
Dominguez V, Sayas FJ (2008) Algorithm 884: a simple matlab implementation of the argyris element. ACM Trans Math Softw 35(2):16:1–16:11
Dziuk G, Elliott C (2013) Finite element methods for surface PDEs. Acta Numer 22:289–396
Echter R, Oesterle B, Bischoff M (2013) A hierarchic family of isogeometric shell finite elements. Comput Methods Appl Mech Eng 254:170–180
Engel G, Garikipati K, Hughes TJ, Larson MG, Mazzei L, Taylor RL (2002) Continuous/discontinuous finite element approximations of fourth-order elliptic problems in structural and continuum mechanics with applications to thin beams and plates, and strain gradient elasticity. Comput Methods Appl Mech Eng 191(34):3669–3750
Gfrerer M, Schanz M (2018) Code verification examples based on the method of manufactured solutions for Kirchhoff-Love and Reissner-Mindlin shell analysis. Eng Comput 34(4):775–785
Gfrerer M, Schanz M (2018) A high-order fem with exact geometry description for the Laplacian on implicitly defined surfaces. Int J Numer Methods Eng 114(11):1163–1178
Gfrerer MH, Schanz M (2018) High order exact geometry finite elements for seven-parameter shells with parametric and implicit reference surfaces. Comput Mech pp 1–13
Grande J, Lehrenfeld C, Reusken A (2018) Analysis of a high-order trace finite element method for pdes on level set surfaces. SIAM J Numer Anal 56(1):228–255
Gurtin ME, Murdoch AI (1975) A continuum theory of elastic material surfaces. Arch Ration Mech Anal 57(4):291–323
Hansbo P, Larson MG (2017) Continuous/discontinuous finite element modelling of Kirchhoff plate structures in \({\mathbb{R}}^3\) using tangential differential calculus. Comput Mech 60(4):693–702
Jankuhn T, Olshanskii MA, Reusken A (2018) Incompressible fluid problems on embedded surfaces: modeling and variational formulations. Interfaces Free Bound. 20:353–377
Kiendl J, Bletzinger KU, Linhard J, Wüchner R (2009) Isogeometric shell analysis with Kirchhoff-Love elements. Comput Methods Appl Mech Eng 198(49):3902–3914
Koiter WT (1966) On the nonlinear theory of thin elastic shells. Proc Koninkl Ned Akad van Wetenschappen, Series B 69:1–54
Long Q, Burkhard Bornemann P, Cirak F (2012) Shear-flexible subdivision shells. Int J Numer Methods Eng 90(13):1549–1577
Naghdi P (1981) Finite deformation of elastic rods and shells. In: Proceedings of the IUTAM Symposium on Finite Elasticity, pp. 47–103. Springer
Neunteufel M, Schöberl J (2019) The Hellan-Herrmann-Johnson method for nonlinear shells. Comput Struct 225:106109–106120
Olshanskii MA, Reusken A (2017) Trace finite element methods for pdes on surfaces. In: Bordas SPA, Burman E, Larson MG, Olshanskii MA (eds) Geometrically unfitted finite element methods and applications. Springer International Publishing, New York, pp 211–258
Olshanskii MA, Reusken A, Grande J (2009) A finite element method for elliptic equations on surfaces. SIAM J Numer Anal 47(5):3339–3358
Olshanskii MA, Safin D (2016) Numerical integration over implicitly defined domains for higher order unfitted finite element methods. Lobachevskii J Math 37(5):582–596
van Opstal T, van Brummelen E, van Zwieten G (2015) A finite-element/boundary-element method for three-dimensional, large-displacement fluid-structure-interaction. Comput Methods Appl Mech Eng 284:637–663
Parvizian J, Düster A, Rank E (2007) Finite cell method. Comput Mech 41(1):121–133
Pietraszkiewicz W (1989) Geometrically nonlinear theories of thin elastic shells. Adv Mech 12:51–130
de Prenter F, Verhoosel CV, van Zwieten GJ, van Brummelen EH (2017) Condition number analysis and preconditioning of the finite cell method. Comput Methods Appl Mech Eng 316:297–327
Rafetseder K, Zulehner W (2019) A new mixed approach to Kirchhoff-Love shells. Comput Methods Appl Mech Eng 346:440–455
Rosenberg S (1997) The Laplacian on a Riemannian manifold: An introduction to analysis on manifolds. No. 31 in London Mathematical Society. Cambridge University Press, Cambridge
Sauer RA, Duong TX (2017) On the theoretical foundations of thin solid and liquid shells. Math Mech Solids 22(3):343–371
Saye R (2015) High-order quadrature methods for implicitly defined surfaces and volumes in hyperrectangles. SIAM J Sci Comput 37(2):A993–A1019
Schillinger D, Ruess M (2015) The Finite Cell Method: A review in the context of higher-order structural analysis of CAD and image-based geometric models. Arch Comput Meth Eng 22(3):391–455
Schöllhammer D, Fries TP (2019) Kirchhoff-Love shell theory based on tangential differential calculus. Comput Mech 64(1):113–131
Zienkiewicz OC, Taylor RL (2000) The finite element method, 5th edn. Butterworth-Heinemann, Oxford
Acknowledgements
The author thanks Thomas-Peter Fries from the Institute of Structural Analysis at TU Graz, and Helmut Gfrerer from the Institute of Computational Mathematics at JKU Linz for valuable discussions on the topic of the paper.
Funding
Open access funding provided by Graz University of Technology.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares that he has no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Proofs
Proof of Lemma 1
It is sufficient to show that the application of the operators \(\hat{{\mathbf {G}}}\) and \({{\mathbf {P}}}\circ \hat{{\mathfrak {g}}}={\mathbf {I}} - \hat{\pmb {\nu }}\otimes \hat{\pmb {\nu }}\) to a basis \((\hat{{\mathbf {g}}}_l,\hat{\pmb {\nu }})\) gives the same result,
Furthermore, direct calculation shows
\(\square \)
Proof of Lemma 3
First we establish the relation
Following [14, Theorem 4.4-4], we have
and the sought relation follows by
With (12), we obtain
Therefore, the first part of the lemma follows
The second part of the lemma can be shown by direct calculation,
\(\square \)
Proof of Lemma 4
The lemma can be shown by the direct calculations
and
\(\square \)
Proof of Lemma 5
For the proof we use the relations (15) and (16). Direct calculation yields for the linearized change in metric tensor
and for the linearized change in curvature tensor
\(\square \)
Proof of Lemma 6
Applying the surface divergence theorem to (41) yields
Using the divergence product rule (27) results in
With (40), and \(\nabla _\varOmega {\mathbf {x}} = {{\mathbf {P}}}\) we have
Due to the definition of the stress tensor (36) we have \( \pmb \sigma ^T = {\mathbf {N}}^T + {\mathbf {S}} \otimes \pmb {\nu }\) and it follows
and furthermore
Thus,
From (89) we deduce the sought conditions
and
\(\square \)
Derivation of the weak form
In this section the weak form of the governing equations is derived. To this end, we multiply (40) with a test function \({\mathbf {v}} \in {\mathcal {V}}_0\) and integrate over the shell surface,
Here, the function space of the test functions is
where \(\varGamma _{D_i}\), \(\varGamma _{D_t}\), and \(\varGamma _{D_\mu }\) denote Dirichlet boundaries. On \(\varGamma _{D_i}\) the displacement in direction \({\mathbf {e}}_i\) is restrained and on \(\varGamma _{D_t}\) and \(\varGamma _{D_\mu }\) the rotation of the shell around the boundary tangent vector and the boundary normal vector is restrained respectively. The corresponding Neumann boundaries are given by \(\varGamma _{N_i} = \varGamma \setminus \varGamma _{D_i}\), \(\varGamma _{N_t} = \varGamma \setminus \varGamma _{D_t}\), and \(\varGamma _{N_\mu } = \varGamma \setminus \varGamma _{D_\mu }\). Integration by parts of the term on the left side yields
We have \(\pmb \sigma ^\top = {\mathbf {N}}^\top + {\mathbf {S}} \otimes \pmb {\nu }\) and obtain
Using (43) and integration by parts of the second term on the left yields
Due to (48) we obtain the relation
Furthermore, we have
and
Therefore, by using (97), (98), and (99) we obtain from (92) the final weak form
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Gfrerer, M.H. A \(C^1\)-continuous Trace-Finite-Cell-Method for linear thin shell analysis on implicitly defined surfaces. Comput Mech 67, 679–697 (2021). https://doi.org/10.1007/s00466-020-01956-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00466-020-01956-5