
Abstract
We present a conservative/dissipative time integration scheme for nonlinear mechanical systems. Starting from a weak form, we derive algorithmic forces and velocities that guarantee the desired conservation/dissipation properties. Our approach relies on a collection of linearly constrained quadratic programs defining high order correction terms that modify, in the minimum possible way, the classical midpoint rule so as to guarantee the strict energy conservation/dissipation properties. The solution of these programs provides explicit formulas for the algorithmic forces and velocities which can be easily incorporated into existing implementations. Similarities and differences between our approach and well-established methods are discussed as well. The approach, suitable for reduced-order models, finite element models, or multibody systems, is tested and its capabilities are illustrated by means of several examples.
























Similar content being viewed by others

References
Arnold VI (1989) Mathematical methods of classical mechanics. Springer, Berlin
Hairer E, Lubich C, Wanner G (2006) Geometric numerical integration, 2nd edn. Springer, Berlin
Stuart AM, Humphries AR (1996) Dynamical systems and numerical analysis. Cambridge University Press, Cambridge
Simo JC, Tarnow N (1992) The discrete energy-momentum method. Conserving algorithms for nonlinear elastodynamics. Z Angew Math Phys 43:757–792
Simo JC, Tarnow N (1994) A new energy and momentum conserving algorithm for the non-linear dynamics of shells. Int J Numer Methods Eng 37:2527–2549
Gonzalez O (1996) Time integration and discrete Hamiltonian systems. J Nonlinear Sci 6:449–467
Kane C, Marsden JE, Ortiz M (1999) Symplectic-energy-momentum preserving variational integrators. J Math Phys 40:3353–3371
McLachlan RI, Quispel GRW, Robideux N (1999) Geometric integration using discrete gradients. Philos Trans Math Phys Eng Sci 357:1021–1045
Armero F, Romero I (2001) On the formulation of high-frequency dissipative time-stepping algorithms for nonlinear dynamics. Part I: low-order methods for two model problems and nonlinear elastodynamics. Comput Methods Appl Mech Eng 190:2603–2649
Marsden JE, West M (2001) Discrete mechanics and variational integrators. Acta Numer 10:357–514
Simo JC, Tarnow N, Doblaré M (1995) Non-linear dynamics of three-dimensional rods: exact energy and momentum conserving algorithms. Int J Numer Methods Eng 38:1431–1473
Romero I, Armero F (2002) An objective finite element approximation of the kinematics of geometrically exact rods and its use in the formulation of an energy-momentum conserving scheme in dynamics. Int J Numer Methods Eng 54:1683–1716
Armero F, Petocz E (1998) Formulation and analysis of conserving algorithms for frictionless dynamic contact/impact problems. Comput Methods Appl Mech Eng 158:269–300
Goicolea JM, García Orden JC (2000) Dynamic analysis of rigid and deformable multibody systems with penalty methods and energy-momentum schemes. Comput Methods Appl Mech Eng 188:789–804
Betsch P, Hesch C, Sänger N, Uhlar S (2010) Variational integrators and energy-momentum schemes for flexible multibody dynamics. J Comput Nonlinear Dyn 5:031001-1–031001-11
Gonzalez O (2000) Exact energy-momentum conserving algorithms for general models in nonlinear elasticity. Comput Methods Appl Mech Eng 190:1763–1783
Laursen TA, Meng XN (2001) A new solution procedure for application of energy-conserving algorithms to general constitutive models in nonlinear elastodynamics. Comput Methods Appl Mech Eng 190:6300–6309
Gotusso L (1985) On the energy theorem for the Lagrange equations in the discrete case. Appl Math Comput 17:129–136
Itoh T, Abe K (1988) Hamiltonian-conserving discrete canonical equations based on variational difference quotients. J Comput Phys 76:85–102
Romero I (2012) An analysis of the stress formula for energy-momentum methods in nonlinear elastodynamics. Comput Mech 50:603–610
Harten A, Lax B, Leer P (1983) On upstream differencing and Godunov-type schemes for hyperbolic conservation laws. SIAM Rev 25:35–61
French DA, Schaeffer JW (1990) Continuous finite element methods which preserve energy properties for nonlinear problems. Appl Math Comput 39:271–295
Groß M, Betsch P, Steinmann P (2005) Conservation properties of a time fe method. Part IV: higher order energy and momentum conserving schemes. Int J Numer Methods Eng 63:1849–1897
Betsch P, Janz A, Hesch C (2018) A mixed variational framework for the design of energy-momentum schemes inspired by the structure of polyconvex stored energy functions. Comput Methods Appl Mech Eng 335:660–696
García Orden JC (2018) Energy and symmetry-preserving formulation of nonlinear constraints and potential forces in multibody dynamics. Nonlinear Dyn 95:823–837
Kuhl D, Ramm E (1996) Constraint energy momentum algorithm and its application to nonlinear dynamics of shells. Comput Methods Appl Mech Eng 136:293–315
Kuhl D, Crisfield MA (1999) Energy-conserving and decaying algorithms in non-linear structural dynamics. Int J Numer Methods Eng 45:569–599
Bottasso CL, Borri M (1997) Energy preserving/decaying schemes for non-linear beam dynamics using the helicoidal approximation. Comput Methods Appl Mech Eng 143:393–415
Bottasso CL, Borri M, Trainelli L (2001) Integration of elastic multibody systems by invariant conserving/dissipating algorithms. II. Numerical schemes and applications. Comput Methods Appl Mech Eng 190:3701–3733
Romero I (2016) High frequency dissipative integration schemes for linear and nonlinear elastodynamics. In: Betsch P (ed) Structure-preserving integrators in nonlinear structural dynamics and flexible multibody dynamics. Springer, Berlin, pp 1–30
Armero F, Romero I (2001) On the formulation of high-frequency dissipative time-stepping algorithms for nonlinear dynamics. Part II: second-order methods. Comput Methods Appl Mech Eng 190:6783–6824
Romero I, Armero F (2002) Numerical integration of the stiff dynamics of geometrically exact shells: an energy-dissipative momentum-conserving scheme. Int J Numer Methods Eng 54:1043–1086
Armero F, Romero I (2003) Energy-dissipative momentum-conserving time-stepping algorithms for the dynamics of nonlinear cosserat rods. Comput Mech 31:3–26
Gebhardt CG, Hofmeister B, Hente C, Rolfes R (2019) Nonlinear dynamics of slender structures: a new object-oriented framework. Comput Mech 63:219–252
Gebhardt CG, Steinbach MC, Rolfes R (2019) Understanding the nonlinear dynamics of beam structures: a principal geodesic analysis approach. Thin-Walled Struct 140:357–372
Kerschen G, Golinval J-C, Vakakis AF, Bergman LA (2005) The method of proper orthogonal decomposition for dynamical characterization and order reduction of mechanical systems: an overview. Nonlinear Dyn 41:147–169
Jansen EL (2005) Dynamic stability problems of anisotropic cylindrical shells via simplified analysis. Nonlinear Dyn 39:349–367
Kreiss H-O, Ortiz OE (2014) Introduction to numerical methods for time dependent differential equations. Wiley, London
Kopmaz O, Gündoğdu O (2003) On the curvature of an Euler–Bernoulli beam. Int J Mech Eng Educ 31:132–142
Nayfeh AH, Pai PF (2008) Linear and nonlinear structural mechanics. Wiley, London
Ye F, Zi-Xiong G, Yi-Chao G (2018) An unconditionally stable explicit algorithm for nonlinear structural dynamics. J Eng Mech 144:04018034-1–04018034-8
Gebhardt CG, Rolfes R (2017) On the nonlinear dynamics of shell structures: combining a mixed finite element formulation and a robust integration scheme. Thin-Walled Struct 118:56–72
Betsch P, Sänger N (2009) On the use of geometrically exact shells in a conserving framework for flexible multibody dynamic. Comput Methods Appl Mech Eng 198:1609–1630
Vu-Quoc L, Tan XG (2003) Optimal solid shells for non-linear analyses of multilayer composites. II. Dynamics. Comput Methods Appl Mech Eng 192:1017–1059
Acknowledgements
Cristian Guillermo Gebhardt and Raimund Rolfes acknowledge the financial support of the Lower Saxony Ministry of Science and Culture (research project ventus efficiens, FKZ ZN3024) and the German Federal Ministry for Economic Affairs and Energy (research project Deutsche Forschungsplattform für Windenergie, FKZ 0325936E) that enabled this work.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
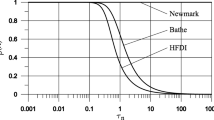
Precision quotient
Precision quotient
It is very useful to have means for checking the correctness of integration algorithms during their development and implementation. Therefore, we introduce here two tests that can be applied once an integration scheme has been numerically implemented. According to Kreiss and Ortiz [38], the numerical solution of an initial value problem can be expanded as
where \(\varvec{\xi }(t)\) is the exact solution of the given initial value problem and \(\varvec{\psi }_{i}\) for \(i=1,\ldots ,n\) are smooth functions of the time t that do not depend on the reference time step h. A positive integer number k allows to define finer solutions based on the original resolution given by the time step h that are necessary to compute precision coefficients, a tool that may be very effective to check the correctness of a running program.
A first precision quotient can be defined as
where the numerator is computed as
and the denominator is given by
It is possible to show that for sufficiently small time steps, the first precision quotient can be directly approximated by \(2^{n}\), where n denotes the order of accuracy of the integration method, namely
The main issue with this definition is that the exact solution of the initial value problem is required and, in general, is not available, especially in the context of mechanical systems involving nonlinear constitutive relations. To circumvent this drawback, it is possible to define a second precision quotient as
where the numerator is computed as
and the denominator is given by
Notice that this concept removes intrinsically the need for the exact solution of the considered initial value problem. Once again, it is possible to show that for sufficiently small time steps, the second precision quotient can be approximated by \(2^{n}\) as well as in the case of the first precision quotient, namely
For the integration scheme considered in this work (an energy-conservative/dissipative method), accuracy of second order can be guaranteed, meaning that \(\log _{2}[Q_{\text {I}}(t)]\approx 2\) and \(\log _{2}[Q_{\text {II}}(t)]\approx 2\). Let us note that for the calculation of precision quotients, h has to be chosen small enough, and the choice may vary from case to case. In addition, if \(\Vert \varvec{\psi }_{n}(t)\Vert \) is very small, both tests may fail even if the implementation is right. For this reason it is sometime necessary to experiment with several initial conditions and time step sizes in order to achieve correct pictures. As a general rule, the quotients of accuracy show better performance when the trajectories are periodic or quasi-periodic.
Rights and permissions
About this article

Cite this article
Gebhardt, C.G., Romero, I. & Rolfes, R. A new conservative/dissipative time integration scheme for nonlinear mechanical systems. Comput Mech 65, 405–427 (2020). https://doi.org/10.1007/s00466-019-01775-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00466-019-01775-3