
Abstract
This paper presents a mortar-based finite element formulation for modeling the dynamics of shear rupture on rough interfaces governed by slip-weakening and rate and state (RS) friction laws, focusing on the dynamics of earthquakes. The method utilizes the dual Lagrange multipliers and the primal–dual active set strategy concepts, together with a consistent discretization and linearization of the contact forces and constraints, and the friction laws to obtain a semi-smooth Newton method. The discretization of the RS friction law involves a procedure to condense out the state variables, thus eliminating the addition of another set of unknowns into the system. Several numerical examples of shear rupture on frictional rough interfaces demonstrate the efficiency of the method and examine the effects of the different time discretization schemes on the convergence, energy conservation, and the time evolution of shear traction and slip rate.












Similar content being viewed by others

References
Scholz CH (2002) “The mechanics of earthquakes and faulting—second edition” by Christopher H. Scholz. Seismol Res Lett. doi:10.1785/gssrl.74.3.333
Bizzarri A, Cocco M, Andrews DJ, Boschi E (2001) Solving the dynamic rupture problem with different numerical approaches and constitutive laws. Geophys J Int 144:656–678. doi:10.1046/j.1365-246X.2001.01363.x
Klinger Y (2010) Relation between continental strike-slip earthquake segmentation and thickness of the crust. J Geophys Res Solid Earth 115:1–19. doi:10.1029/2009JB006550
Candela T, Renard F, Klinger Y et al (2012) Roughness of fault surfaces over nine decades of length scales. J Geophys Res Solid Earth 117:1–30. doi:10.1029/2011JB009041
Brown SR, Scholz CH (1985) Broad bandwidth study of the topography of natural rock surfaces. J Geophys Res 90:12575. doi:10.1029/JB090iB14p12575
Power WL, Tullis TE, Brown SR et al (1987) Roughness of natural fault surfaces. Geophys Res Lett 14:29. doi:10.1029/GL014i001p00029
Power WL, Tullis TE (1991) Euclidean and fractal models for the description of rock surface roughness. J Geophys Res 96:415. doi:10.1029/90JB02107
Renard F, Voisin C, Marsan D, Schmittbuhl J (2006) High resolution 3D laser scanner measurements of a strike-slip fault quantify its morphological anisotropy at all scales. Geophys Res Lett 33:33–36. doi:10.1029/2005GL025038
Sagy A, Brodsky EE, Axen GJ (2007) Evolution of fault-surface roughness with slip. Geology 35:283–286. doi:10.1130/G23235A.1
Candela T, Renard F, Bouchon M et al (2009) Characterization of fault roughness at various scales: implications of three-dimensional high resolution topography measurements. Pure Appl Geophys 166:1817–1851. doi:10.1007/s00024-009-0521-2
Bistacchi A, Griffith WA, Smith SAF et al (2011) Fault roughness at seismogenic depths from LIDAR and photogrammetric analysis. Pure Appl Geophys 168:2345–2363. doi:10.1007/s00024-011-0301-7
Dunham EM, Belanger D, Cong L, Kozdon JE (2011) Earthquake ruptures with strongly rate-weakening friction and off-fault plasticity, part 2: Nonplanar faults. Bull Seismol Soc Am 101:2308–2322. doi:10.1785/0120100076
Fang Z, Dunham EM (2013) Additional shear resistance from fault roughness and stress levels on geometrically complex faults. J Geophys Res Solid Earth 118:3642–3654. doi:10.1002/jgrb.50262
Shi Z, Day SM (2013) Rupture dynamics and ground motion from 3-D rough-fault simulations. J Geophys Res Solid Earth 118:1122–1141. doi:10.1002/jgrb.50094
Bruhat L, Fang Z, Dunham EM (2016) Rupture complexity and the supershear transition on rough faults. J Geophys Res Solid Earth. doi:10.1002/2015JB012512.Received
Papadopoulos P, Taylor RL (1992) A mixed formulation for the finite element solution of contact problems. Comput Methods Appl Mech Eng 94:373–389
Yang B, Laursen TA, Meng X (2005) Two dimensional mortar contact methods for large deformation frictional sliding. Int J Numer Methods Eng 62:1183–1225. doi:10.1002/nme.1222
Bernardi C, Maday Y, Patera AT (1993) Domain decomposition by the mortar element method. Asymptot Numer Methods Partial Differ Equ Crit Parameters. doi:10.1007/978-94-011-1810-1_17
Puso MA, Laursen TA (2004) A mortar segment-to-segment frictional contact method for large deformations. Int J Numer Methods Eng 193:4891–4913. doi:10.1016/j.cma.2004.06.001
Puso MA, Laursen TA, Solberg J (2008) A segment-to-segment mortar contact method for quadratic elements and large deformations. Comput Methods Appl Mech Eng 197:555–566. doi:10.1016/j.cma.2007.08.009
Fischer KA, Wriggers P (2005) Frictionless 2D contact formulations for finite deformations based on the mortar method. Comput Mech. doi:10.1007/s00466-005-0660-y
Fischer KA, Wriggers P (2006) Mortar based frictional contact formulation for higher order interpolations using the moving friction cone. Comput Methods Appl Mech Eng 195:5020–5036. doi:10.1016/j.cma.2005.09.025
Wohlmuth BI (2000) A mortar finite element method using dual spaces for the Lagrange multiplier. SIAM J Numer Anal 38:989–1012
Hüeber S, Wohlmuth BI (2005) A primal–dual active set strategy for non-linear multibody contact problems. Comput Methods Appl Mech Eng 194:3147–3166. doi:10.1016/j.cma.2004.08.006
Hüeber S, Stadler G, Wohlmuth BI (2008) A primal–dual active set algorithm for three-dimensional contact problems with Coulomb friction. SIAM J Sci Comput 30:572–596
Brunssen S, Schmid F, Schafer M, Wohlmuth BI (2007) A fast and robust iterative solver for nonlinear contact problems using a primal–dual active set strategy and algebraic multigrid. Int J Numer Methods Eng. doi:10.1002/nme
Popp A, Gee MW, Wall WA (2009) A finite deformation mortar contact formulation using a primal–dual active set strategy. Int J Numer Methods Eng 79:1354–1391. doi:10.1002/nme.2614
Gitterle M, Popp A, Gee MW, Wall WA (2010) Finite deformation frictional mortar contact using a semi-smooth Newton method with consistent linearization. Int J Numer Methods Eng 84:543–571. doi:10.1002/nme.2907
Hager C, Hüeber S, Wohlmuth BI (2008) A stable energy-conserving approach for frictional contact problems based on quadrature formulas. Int J Numer Methods Eng 73:205–225
Hager C, Wohlmuth BI (2009) Analysis of a space-time discretization for dynamic elasticity problems based on mass-free surface elements. SIAM J Numer Anal 47:1863–1885
Xu S, Ben-Zion Y, Ampuero J-P, Lyakhovsky V (2015) Dynamic ruptures on a frictional interface with off-fault brittle damage? Feedback mechanisms and effects on slip and near-fault motion. Pure Appl Geophys 172:1243–1267. doi:10.1007/s00024-014-0923-7
Ida Y (1972) Cohesive force across the tip of a longitudinal-shear crack and Griffith’s specific surface energy. J Geophys Res 77:3796. doi:10.1029/JB077i020p03796
Palmer AC, Rice JR (1973) The growth of slip surfaces in the progressive failure of over-consolidated clay. Proc R Soc Lond A 332:527–548. doi:10.1098/rspa.1983.0054
Andrews DJ (1976) Rupture velocity of plane strain shear cracks. J Geophys Res 81:5679. doi:10.1029/JB081i032p05679
Ohnaka M, Yamashita T (1989) A cohesive zone model for dynamic shear faulting based on experimentally inferred constitutive relation and strong motion source parameters. J Geophys Res 94:4089. doi:10.1029/JB094iB04p04089
Di Toro G, Han R, Hirose T et al (2011) Fault lubrication during earthquakes. Nature 471:494–498. doi:10.1038/nature09838
Dieterich JH (1979) Modeling of rock friction: 1. Experimental results and constituve equations. J Geophys Res 84:2161–2168. doi:10.1007/BF00876539
Ruina A (1983) Slip instability and state variable friction law. J Geophys Res 88:10359–10370. doi:10.1029/JB088iB12p10359
Beeler NM, Tullis TE, Weeks JD (1994) The roles of time and displacement in the evolution effect in rock friction. Geophys Res Lett 21:1987. doi:10.1029/94GL01599
Bathe KJ (1996) Finite element procedures. Prentice Hall, Upper Saddle River
Hartmann S, Brunssen S, Ramm E, Wohlmuth B (2007) Unilateral non-linear dynamic contact of thin-walled structures using a primal-dual active set strategy. Int J Numer Methods Eng 70:883–912. doi:10.1002/nme.1894
Hilber HM, Hughes TJR, Taylor RL (1977) Improved numerical dissipation for time integration algorithms in structural dynamics. Earthq Eng Struct Dyn 5:283–292. doi:10.1002/eqe.4290050306
Newmark NM (1959) A method of computation for structural dynamics. J Eng Mech Div 85:67–94
Gonzalez O (2000) Exact energy-momentum conserving algorithms for general models in nonlinear elasticity. Comput Methods Appl Mech 190:1763–1783. doi:10.1016/S0045-7825(00)00189-4
Laursen TA, Meng XN (2001) A new solution procedures for application of energy-conserving algorithms to general constitutive models in nonlinear elastodynamics. Comput Methods Appl Mech Eng 190:6309–6322. doi:10.1016/S0045-7825(01)00257-2
Laursen T, Chawla V (1997) Design of energy conserving algorithms for frictionless dynamic contact problems. Int J Numer Methods Eng 40:863–886. doi:10.1002/(SICI)1097-0207(19970315)40:5<863::AID-NME92>3.0.CO;2-V
Hauret P, Le TP (2006) Energy-controlling time integration methods for nonlinear elastodynamics and low-velocity impact. Comput Methods Appl Mech Eng 195:4890–4916. doi:10.1016/j.cma.2005.11.005
Hesch C, Betsch P (2011) Transient three-dimensional contact problems: mortar method. Mixed methods and conserving integration. Comput Mech 48:461–475. doi:10.1007/s00466-011-0583-8
Liu F, Borja RI (2009) An extended finite element framework for slow-rate frictional faulting with bulk plasticity and variable friction. Int J Numer Anal Methods Geomech 33:1535–1560. doi:10.1002/nag.777
Acknowledgements
This work was supported by Aramco Grant 6500009957 and the Southern California Earthquake Center (SCEC) Grant 16108. SCEC is funded by NSF Cooperative Agreement EAR-1033462 and USGS Cooperative Agreement G12AC20038.
Author information
Authors and Affiliations
Corresponding author
Appendices
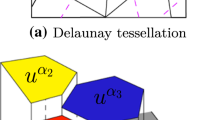
Appendix A: The mortar integral matrices
The coupling matrices \(\mathbf{D}_S\) and \(\mathbf{M}_M\) arising from the mortar integrals are evaluated as
While numerical integration of the mortar matrix \(\mathbf{D}_S\) involves simply the integration of the slave side displacement shape functions over the current slave contact, numerical integration of the mortar matrix \(\mathbf{M}_M\) is more complex because it involves the product of master side shape functions and slave side dual shape functions over the slave contact surface. To perform this integration, we follow the approach in [17, 27], in which the integration domain is discretized into contact segments, on which both shape functions are defined continuously.
Appendix B: Linearization details
An important aspect of Sect. 6.2 is the consistent linearization of (32). We supply linearization details in this section of the “Appendix”.
The linearization of the force equilibrium in (32a) is given by
where \({ }^k \mathbf{K}_{int}^{t+\hat{\upalpha }}\) is the tangent stiffness matrix and \({ }^k \mathbf{K}^{t+\hat{\upalpha } }\) is an effective stiffness matrix defined as \({ }^k \mathbf{K}^{t+\hat{\upalpha } }=\left( \frac{1}{\beta \Delta t^{2}}{} \mathbf{M}\right. \left. +{ }^k \mathbf{K}_{int}^{t+\hat{\upalpha } } \right) \). The linearization of the contact forces can be expressed as
where the matrix \(\tilde{\mathbf{C}}\in {\mathbb {R}}^{\left( {2n_{sl} +2n_{mas} } \right) \times \left( {2n_{sl} +2n_{mas} } \right) }\) includes the directional derivatives of mortar matrices \(\mathbf{M}_M\) and \(\mathbf{D}_S\) multiplied by the current Lagrange multiplier values \({ }^k {{\varvec{\lambda }} }^{t+\hat{\upalpha } }\) and \(\Delta { }^k \mathbf{d}_{SM} \in {\mathbb {R}}^{2n_{sl} +2n_{mas}}\) are the corresponding incremental displacements of slave (S) and master (M) nodes. The directional derivatives of mortar matrices \(\mathbf{M}_M\) and \(\mathbf{D}_S\) are given in [27].
The linearization of the contact condition in the normal direction (32b) involves the directional derivative of the gap function (35b), which is given by
where \(\Delta {}_{}^k{{{\dot{\mathbf{d}}}}^{t + {{\upalpha }}}} = \frac{{\alpha \gamma }}{{\beta {{\Delta }}t}}\Delta {}^k{\mathbf{d}^{t + 1}}\) and the directional derivative of the unit normal vector \({ }^k \mathbf{n}_j^{t+1}\) is given in [27].
In the tangential direction, the directional derivatives of the contact condition (32c) with a variable friction coefficient becomes
and
for the sticking and slipping nodes, respectively, where the directional derivative of the weighted tangential relative velocity \({ }^k \tilde{v}_{tj}^{t+\hat{\upalpha } }\) is similar to (63) but with \({ }^k \mathbf{t}_j^{t+{\upalpha }}\) replacing \(-{ }^k \mathbf{n}_j^{t+{\upalpha }}\) and \(\Delta { }^k \mathbf{t}_j^{t+{\upalpha }} =\mathbf{e}_3 \times \Delta { }^k \mathbf{n}_j^{t+{\upalpha }}\). The directional derivatives of the normal and tangential components of the Lagrange multiplier are given by
where \(\Delta { }^k {{\varvec{\lambda }} }_j^{t+\hat{\upalpha } } ={ }^{k+1} {{\varvec{\lambda }} }_j^{t+\hat{\upalpha } } -{ }^k {{\varvec{\lambda }}}_j^{t+\hat{\upalpha }}\).
Rights and permissions
About this article

Cite this article
Tal, Y., Hager, B.H. Dynamic mortar finite element method for modeling of shear rupture on frictional rough surfaces. Comput Mech 61, 699–716 (2018). https://doi.org/10.1007/s00466-017-1475-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00466-017-1475-3