
Abstract
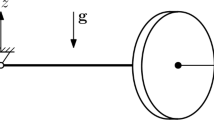
Variational integrators are obtained for two mechanical systems whose configuration spaces are, respectively, the rotation group and the unit sphere. In the first case, an integration algorithm is presented for Euler’s equations of the free rigid body, following the ideas of Marsden et al. (Nonlinearity 12:1647–1662, 1999). In the second example, a variational time integrator is formulated for the rigid dumbbell. Both methods are formulated directly on their nonlinear configuration spaces, without using Lagrange multipliers. They are one-step, second order methods which show exact conservation of a discrete angular momentum which is identified in each case. Numerical examples illustrate their properties and compare them with existing integrators of the literature.
Similar content being viewed by others

References
Antman SS (1992) Nonlinear problems of elasticity. Springer, Heidelberg
Argyris JH (1982) An excursion into large rotations. Comput Methods Appl Mech Eng 32: 85–155
Arnold VI (1989) Mathematical methods of classical mechanics. Springer, Heidelberg
Austin M, Krishnaprasad PS, Wang LS (1993) Almost Poisson integration of rigid body systems. J Comput Phys 107(1): 105–117
Goldstein H (1980) Classical mechanics, 2nd edn. Addison-Wesley, Reading
Hairer E, Lubich C, Wanner G (2002) Geometric numerical integration. Springer series in Computational Mathematics. Springer, Heidelberg
Iserles A, Munthe-Kass HZ, Norsett SP, Zanna A (2000) Lie group methods. Acta Numer 9: 215–365
Kharevych L, Weiwei, Tong Y, Kanso E, Marsden JE, Schröder P, Desbrun M (2006) Geometric, variational integrators for computer animation. In: Eurographics/ACM SIGGRAPH symposium on Computer Animation, The Eurographics Association
Krysl P (2005) Explicit momentum-conserving integrator for dynamics of rigid bodies approximating the midpoint lie algorithm. Int J Numer Methods Eng 63(15): 2171–2193
Krysl P (2007) Dynamically equivalent implicit algorithms for the integration of rigid body rotations. Int J Numer Methods Eng (in press). doi:10.1002/cnm.963
Kuipers JB (1999) Quaternions and rotation sequences. Princeton University Press, Princeton
Lee T, Leok M, Harris McClamrock N (2007) Lie group variational integrators for the full body problem. Comput Methods Appl Mech Eng 196: 2907–2924
Lew A, Marsden JE, Ortiz M, West M (2003) Asynchronous variational integrators. Arch Rational Mech Anal 167: 85–146
Lew A, Marsden JE, Ortiz M, West M (2004) Variational time integrators. Int J Numer Methods Eng 60: 153–212
Lewis D, Simo JC (1996a) Conserving algorithms for the N-dimensional rigid body. In: Integration algorithms and classical mechanics (Toronto, ON, 1993). Amer. Math. Soc., Providence, pp 121–139
Lewis D, Simo JC (1996b) Conserving algorithms for the N-dimensional rigid body. Fields Inst commun 10: 121–139
Maeda S (1980) Canonical structure and symmetries for discrete dynamics. Math Jpn 25: 405–420
Marsden JE, Ratiu TS (1994) Introduction to mechanics and Symmetry, 1st edn. Springer, New York
Marsden JE, West M (2001) Discrete mechanics and variational integrators. Acta Numer 10: 357–514
Marsden JE, Pekarsky S, Shkoller S (1999) Discrete Euler–Poincaré and Lie-Poisson equations. Nonlinearity 12: 1647–1662
Moser J, Veselov AP (1991) Discrete versions of some classical integrable systems and factorization of matrix polynomilas. Commun Math Phys 139(2): 217–243
Sanz-Serna JM, Calvo MP (1994) Numerical Hamiltonian problems. Chapman and Hall, London
Simo JC, Wong K (1991) Unconditionally stable algorithms for rigid body dynamics that exactly preserve energy and momentum. Int J Numer Methods Eng 31: 19–52
Simo JC, Fox DD, Rifai MS (1990) On a stress resultant geometrically exact shell model. III. Computational aspects of the nonlinear theory. Comput Methods Appl Mech Eng 79(1): 21–70
Simo JC, Tarnow N, Wong KK (1992) Exact energy-momentum conserving algorithms and symplectic schemes for nonlinear dynamics. Comput Methods Appl Mech Eng 100(1): 63–116
Veselov AP (1988) Integrable discrete-time systems and difference operators. Funkts Anal Prilozhen 22(2): 1–13
Wendlandt JM, Marsden JE (1997) Mechanical integrators derived from a discrete variational principle. Phys D 106(3–4): 223–246
Author information
Authors and Affiliations
Corresponding author
Additional information
Financial support for this work has been provided by grant DPI2006-14104 from the Spanish Ministry of Education and Science.
Rights and permissions
About this article
Cite this article
Romero, I. Formulation and performance of variational integrators for rotating bodies. Comput Mech 42, 825–836 (2008). https://doi.org/10.1007/s00466-008-0286-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00466-008-0286-y