
Abstract
Mathematical modeling of the neuro-musculoskeletal system in healthy subjects has been pursued extensively. In post-stroke patients, however, such models are very primitive. Besides improving our general understanding of how stroke affects the limb motions, they can be used to evaluate rehabilitation strategies by computer simulations before clinical evaluations. A planar neuro-musculoskeletal arm model for post-stroke patients is developed. The main idea is to use a set of new coefficients, Muscle Significance Factors (MSF), to incorporate the effects of stroke in the muscle control performance. The model uses the optimal control theory to mimic the performance of the CNS and a two-link skeletal model with six muscles for the biomechanical part. The model was developed and evaluated using experimental data from six post-stroke patients with Brunnstrom levels of 4–6. The results show that MSFs are relatively distinct and independent from the arm motion which is used to determine their values. Its variation is in the range of 0–2.58% and decreases in higher Brunnstrom levels. The mean error of the model in predicting the path of motion varies from 0.9% in level 6 to 5.58% in level 4 subjects which can be considered a promising level of accuracy. Using the proposed model and the MSF to customize the model for each individual stroke patient seems a promising approach. It shows a reasonable level of robustness, i.e., independence from the type of motions and correlated with the severity of stroke, and accuracy in predicting the shape of the motion path.


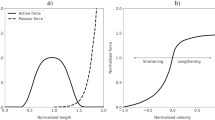
(Reproduced with permission from Sharifi et al. 2017)







Similar content being viewed by others


References
Anderson FC, Pandy MG (2001) Dynamic optimization of human walking. J Biomech Eng 125:381–390
Balaghi E, Hadi M, Vatankhah R, Broushaki M, Alasty A (2016) Adaptive optimal multi-critic based neuro-fuzzy control of MIMO human musculoskeletal arm model. Neurocomputing 173:1529–1537
Bernabucci I, Conforto S, Capozza M, Accornero N, Schmid M, D’Alessio T (2007) A biologically inspired neural network controller for ballistic arm movements. J Neuroeng Rehabil 4:33
Bhushan N, Shadmehr R (1999) Computational nature of human adaptive control during learning of reaching movements in force fields. Biol Cybern 81:39–60
Blana D, Kirsch RF, Chadwick EK (2009) Combined feedforward and feedback control of a redundant, nonlinear, dynamic musculoskeletal system. Med Biol Eng Comput 47:533–542
Breteler MDK, Spoor CW, Van der Helm FCT (1999) Measuring muscle and joint geometry parameters of a shoulder for modeling purposes. J Biomech 32:1191–1197
Çelik G, Baykan ÖK, Kara Y, Tireli H (2014) Predicting 10-day mortality in patients with strokes using neural networks and multivariate statistical methods. J Stroke Cerebrovasc Dis 23:1506–1512
Charalambous CP (2014) Interrater reliability of a modified Ashworth scale of muscle spasticity. In: Classic papers in orthopaedics. Springer
Cirstea MC, Levin MF (2000) Compensatory strategies for reaching in stroke. Brain 123:940–953
Dong H, Figueroa N, El Saddik A (2015) Adaptive “load-distributed” muscle coordination method for kinematically redundant musculoskeletal humanoid systems. Robot Auton Syst 64:59–69
Eberhart R, Kennedy J (1995) A new optimizer using particle swarm theory. In: Proceedings of the sixth international symposium on micro machine and human science, 1995. MHS’95. IEEE, pp 39–43
Flash T, Hogan N (1985) The coordination of arm movements: an experimentally confirmed mathematical model. J Neurosci 5:1688–1703
Han CE, Arbib MA, Schweighofer N (2008) Stroke rehabilitation reaches a threshold. PLoS Comput Biol 4:e1000133
Heim A, Stryk OV (2000) Trajectory optimization of industrial robots with application to computer aided robotics and robot controllers. Optimization 47:407–420
Holzbaur KRS, Murray WM, Gold GE, Delp SL (2007) Upper limb muscle volumes in adult subjects. J Biomech 40(4):742–749
Kirk DE (2004) Optimal Control Theory: An Introduction. Dover Publications, Mineola
Lee LF, Narayanan MS, Kanna S, Mendel F, Krovi VN (2009) Case studies of musculoskeletal-simulation-based rehabilitation program evaluation. IEEE Trans Robot 25:634–638
Li W, Todorov E (2007) Iterative linearization methods for approximately optimal control and estimation of non-linear stochastic system. Int J Control 80:1439–1453
Macko RF, Smith GV, Dobrovolny CL, Sorkin JD, Goldberg AP, Silver KH (2001) Treadmill training improves fitness reserve in chronic stroke patients. Arch Phys Med Rehabil 82:879–884
Mehdizadeh H, Taghizadeh G, Ghomashchi H, Parnianpour M, Khalaf K, Salehi R, Esteki A, Ebrahimi I, Sangelaji B (2015) The effects of a short-term memory task on postural control of stroke patients. Top Stroke Rehabil 22:335–341
Mombaur K, Truong A, Laumond J-P (2010) From human to humanoid locomotion—an inverse optimal control approach. Auton Robots 28:369–383
Murray WM, Buchanan TS, Delp SL (2000) The isometric functional capacity of muscles that cross the elbow. J Biomech 33(8):943–952
Nakano E, Imamizu H, Osu R, Uno Y, Gomi H, Yoshioka T, Kawato M (1999) Quantitative examinations of internal representations for arm trajectory planning: minimum commanded torque change model. J Neurophysiol 81(5):2140–2155
Park H, Durand DM (2008) Motion control of musculoskeletal systems with redundancy. Biol Cybern 99:503–516
Pigeon P, Yahia LH, Feldman AG (1996) Moment arms and lengths of human upper limb muscles as functions of joint angles. J Biomech 29(10):1365–1370
Reinkensmeyer DJ, Iobbi MG, Kahn LE, Kamper DG, Takahashi CD (2003) Modeling reaching impairment after stroke using a population vector model of movement control that incorporates neural firing-rate variability. Neural Comput 15:2619–2642
Shadmehr R, Smith MA, Krakauer JW (2010) Error correction, sensory prediction, and adaptation in motor control. Annu Rev Neurosci 33:89–108
Sharifi M, Salarieh Ha, Behzadipour S (2017) Nonlinear optimal control of planar musculoskeletal arm model with minimum muscles stress criterion. J Comput Nonlinear Dyn 12:011014
Stroeve S (1998) Neuromuscular control model of the arm including feedback and feedforward components. Acta Psychol 100:117–131
Suzuki M, Yamazaki Y, Mizuno N, Matsunami K (1997) Trajectory formation of the center-of-mass of the arm during reaching movements. Neuroscience 76:597–610
Thaler L, Todd JT (2009) The control parameters used by the CNS to guide the hand depend on the visuo-motor task: evidence from visually guided pointing. Neuroscience 159:578–598
Todorov E, Jordan MI (2002) Optimal feedback control as a theory of motor coordination. Nat Neurosci 5:1226
Todorov E, Li W (2003) Optimal control methods suitable for biomechanical systems. In: Engineering in medicine and biology society, 2003. Proceedings of the 25th annual international conference of the IEEE. IEEE, pp 1758–61
Uno Y, Kawato M, Suzuki R (1989) Formation and control of optimal trajectory in human multijoint arm movement. Biol Cybern 61:89–101
Veeger HEJ, Yu B, An K-N, Rozendal RH (1997) Parameters for modeling the upper extremity. J Biomech 30(6):647–652
Zadravec M, Matjačić Z (2013) Planar arm movement trajectory formation: an optimization based simulation study. Biocybern Biomed Eng 33:106–117
Acknowledgements
This work was partially supported financially by Iran National Science Foundation, under Grant Number 92042014.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Ethical approval
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki Declaration and its later amendments or comparable ethical standards.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Additional information
Communicated by Benjamin Lindner.
Rights and permissions
About this article

Cite this article
Asghari, M., Behzadipour, S. & Taghizadeh, G. A planar neuro-musculoskeletal arm model in post-stroke patients. Biol Cybern 112, 483–494 (2018). https://doi.org/10.1007/s00422-018-0773-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00422-018-0773-y