
Abstract
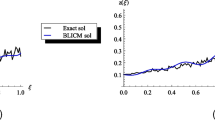
This paper focuses mainly on developing single-step explicit integration algorithms considering the implicit treatment of velocity. A novel explicit algorithm (GSSI) is proposed and recommended as a self-starting dissipative alternative to the central difference methods in transient analysis. GSSI not only shares the same advantages as the central difference methods, such as second-order accuracy and computational cost, but also achieves flexible dissipation control and self-starting property. Remarkably, GSSI provides a significantly larger stability bound than the central difference methods in the damped case. GSSI imposes two algorithmic parameters (\( \rho _s \) and \( \rho _b \)) to flexibly adjust numerical dissipation at the bifurcation point. In general, the \( \rho _b \) controls numerical dissipation at the bifurcation point, while the \(\rho _s \) further adjusts the amount of dissipation in the low-frequency range. Spectral analysis and numerical examples are given solved to show the superiority of GSSI over the existing single-step explicit methods with respect to accuracy, stability, and dissipation control.































Similar content being viewed by others

References
Hughes, T.J.R.: The Finite Element Method: Linear Static and Dynamic Finite Element Analysis. Dover Publications (2000)
Cook, R.D., Malkus, D.S., Plesha, M.E., Witt, R.J.: Concepts and Applications of Finite Element Analysis, 4th edn. Wiley (2001)
Butcher, J.C.: Numerical Methods for Ordinary Differential Equations, 3rd edn. Wiley (2016)
Dokainish, M.A., Subbaraj, K.: A survey of direct time-integration methods in computational structural dynamics—I. Explicit methods. Comput. Struct. 32(6), 1371–1386 (1989)
Subbaraj, K., Dokainish, M.A.: A survey of direct time-integration methods in computational structural dynamics—II. Implicit methods. Comput. Struct. 32(6), 1387–1401 (1989)
Maheo, L., Grolleau, V., Rio, G.: Numerical damping of spurious oscillations: a comparison between the bulk-viscosity method and the Tchamwa–Wielgosz dissipative explicit scheme. Comput. Mech. 51(1), 109–128 (2013)
Rezaiee-Pajand, M., Karimi-Rad, M.: A new explicit time integration scheme for nonlinear dynamic analysis. Int. J. Struct. Stab. Dyn. 16(09), 1550054 (2016)
Rezaiee-Pajand, M., Karimi-Rad, M.: A family of second-order fully explicit time integration schemes. Comput. Appl. Math. 9, 1–24 (2017)
Hulbert, G.M., Chung, J.: Explicit time integration algorithms for structural dynamics with optimal numerical dissipation. Comput. Methods Appl. Mech. Eng. 137(2), 175–188 (1996)
Li, J., Yu, K., Li, X.: An identical second-order single step explicit integration algorithm with dissipation control for structural dynamics. Int. J. Numer. Methods Eng. 122(4), 1089–1132 (2021)
Wood, W., Bossak, M., Zienkiewicz, O.: An alpha modification of Newmark’s method. Int. J. Numer. Methods Eng. 15(10), 1562–1566 (1980)
Belytschko, T., Liu, W.K., Moran, B., Elkhodary, K.: Nonlinear Finite Elements for Continua and Structures, 2nd edn. Wiley (2014)
Borst, R.D., Crisfield, M., Remmers, J., Verhoosel, C.: Nonlinear Finite Element Analysis of Solids and Structures, 2nd edn. Wiley (2012)
Namburu, R.R., Tamma, K.K.: A generalized \(\gamma _s\)-family of self-starting algorithms for computational structural dynamics. AIAA J. (1992). https://doi.org/10.2514/6.1992-2330
Bazzi, G., Anderheggen, E.: The \(\rho \)-family of algorithms for time-step integration with improved numerical dissipation. Earthq. Eng. Struct. Dyn. 10(4), 537–550 (1982)
Großeholz, G., Soares, D., Jr., Von Estorff, O.: A stabilized central difference scheme for dynamic analysis. Int. J. Numer. Methods Eng. 102(11), 1750–1760 (2015)
Soares, D., Jr., Großeholz, G.: Nonlinear structural dynamic analysis by a stabilized central difference method. Eng. Struct. 173, 383–392 (2018)
Soares, D., Jr.: A locally stabilized central difference method. Finite Elements Anal. Des. 155, 1–10 (2019)
Macek, R.W., Aubert, B.H.: A mass penalty technique to control the critical time increment in explicit dynamic finite element analyses. Earthq. Eng. Struct. Dyn. 24(10), 1315–1331 (1995)
Olovsson, L., Unosson, M., Simonsson, K.: Selective mass scaling for thin walled structures modeled with tri-linear solid elements. Comput. Mech. 34(2), 134–136 (2004)
Soares, D., Jr.: A novel conjoined space–time formulation for explicit analyses of dynamic models. Eng. Comput. (2022). https://doi.org/10.1007/s00366-021-01565-7
Soares, D., Jr.: Two efficient time-marching explicit procedures considering spatially/temporally-defined adaptive time-integrators. Int. J. Comput. Methods 19(01), 2150051 (2022)
Noh, G., Bathe, K.J.: An explicit time integration scheme for the analysis of wave propagations. Comput. Struct. 129, 178–193 (2013)
Li, J., Yu, K.: Development of composite sub-step explicit dissipative algorithms with truly self-starting property. Nonlinear Dyn. 103, 1911–1936 (2021)
Ji, Y., Xing, Y.: A three-stage explicit time integration method with controllable numerical dissipation. Arch. Appl. Mech. 91, 3959–3985 (2021)
Li, J., Yu, K., Zhao, R.: Two third-order explicit integration algorithms with controllable numerical dissipation for second-order nonlinear dynamics. Comput. Methods Appl. Mech. Eng. 395, 114945 (2022)
Rezaiee-Pajand, M., Hashemian, M., Bohluly, A.: A novel time integration formulation for nonlinear dynamic analysis. Aerosp. Sci. Technol. 69, 625–635 (2017)
Yu, K.: A new family of generalized-\(\alpha \) time integration algorithms without overshoot for structural dynamics. Earthq. Eng. Struct. Dyn. 37(12), 1389–1409 (2008)
Li, J., Zhao, R., Yu, K., Li, X.: Directly self-starting higher-order implicit integration algorithms with flexible dissipation control for structural dynamics. Comput. Methods Appl. Mech. Eng. 389, 114274 (2022)
Hilber, H.M., Hughes, T.J.R.: Collocation, dissipation and ‘overshoot’ for time integration schemes in structural dynamics. Earthq. Eng. Struct. Dyn. 6(1), 99–117 (1978)
Li, J., Yu, K.: A novel family of composite sub-step algorithms with desired numerical dissipations for structural dynamics. Arch. Appl. Mech. 90, 737–772 (2019)
Géradin, M., Rixen, D.: Mechanical Vibrations: Theory and Application to Structural Dynamics, 3rd edn. Wiley, Chichester (2015)
Chung, J., Lee, J.M.: A new family of explicit time integration methods for linear and non-linear structural dynamics. Int. J. Numer. Methods Eng. 37(23), 3961–3976 (1994)
Newmark, N.M.: A method of computation for structural dynamics. J. Eng. Mech. Div. 85(3), 67–94 (1959)
Li, J., Yu, K.: A simple truly self-starting and l-stable integration algorithm for structural dynamics. Int. J. Appl. Mech. 12(10), 2050119 (2020)
Li, J., Yu, K.: A truly self-starting implicit family of integration algorithms with dissipation control for nonlinear dynamics. Nonlinear Dyn. 102(4), 2503–2530 (2020)
Li, J., Yu, K., Tang, H.: Further assessment of three Bathe algorithms and implementations for wave propagation problems. Int. J. Struct. Stab. Dyn. 21(05), 2150073 (2021)
Yue, B., Guddati, M.N.: Dispersion-reducing finite elements for transient acoustics. J. Acoust. Soc. Am. 118(4), 2132–2141 (2005)
Acknowledgements
This work is supported by the National Natural Science Foundation of China (Grant Nos. 11372084 and 12102103), the Heilongjiang Touyan Innovation Team Program, and Fundamental Research Funds for the Central Universities (Grant No. HIT.NSRIF.2020014). The helpful and constructive comments from the referees have led to the improvement of this paper; the authors gratefully acknowledge this assistance. In addition, the second author acknowledges the financial support from the China Scholarship Council (Grant No. 202006120104).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The identity among the classical CD, half-step, and Newmark explicit methods
The identity among the classical CD, half-step, and Newmark explicit methods
First, when the time step \( \varDelta t\) is assumed to be constant, the classical CD method (2) is algebraically identical to the Newmark explicit scheme (4). The classical CD method is rewritten herein as
The displacement vector \( {{\mathbf {U}}}_{n-1}\) can be eliminated in Eq. (A1) to yield
whereas the displacement vector \( {{\mathbf {U}}} _{n+1}\) can also be eliminated in Eq. (A1) to give
With the time step \( \varDelta t\) unchanged, Eq. (A3) can go one time step further to give
Substituting Eq. (A2) into Eq. (A4) to eliminate \( {{\mathbf {U}}} _{n+1}\) yields
As one can see, Eqs. (A2) and (A5) are integration formulas of the Newmark explicit method (4). Hence, the classical CD method is algebraically identical to the Newmark explicit scheme when the time step remains unchanged.
Next, when the time step \( \varDelta t\) is assumed to be constant, the half-step scheme (2) is algebraically identical to the Newmark explicit method (4). The half-step scheme (3) is rewritten as follows.
The schemes above can be re-organized as
With the time step \( \varDelta t\) unchanged, Eq. (A6b) and Eq. (A7a) can go one integration step back to give
Equation (A8) reveals that the velocity vector \( \dot{{{\mathbf {U}}}}_{n-1/2}\) should be calculated as \( \dot{{{\mathbf {U}}}}_{n-1/2}=\dot{{{\mathbf {U}}}}_n-\dfrac{1}{2}\varDelta t\ddot{{{\mathbf {U}}}}_n \), and thus Eq. (A7b) can be further simplified as
Substituting the equation above into Eq. (A7a) to eliminate \( \dot{{{\mathbf {U}}}} _{n+1}\) yields
Obviously, Eqs. (A9a) and (A9b) are integration formulas of the Newmark explicit method. Hence, the half-step scheme (3) is algebraically identical to the Newmark explicit method when the time step remains unchanged.
Finally, it is concluded that the classical CD, half-step, and Newmark explicit methods are algebraically identical to each other on the condition that the time step \( \varDelta t\) remains unchanged.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Zhao, R., Li, J. & Yu, K. A self-starting dissipative alternative to the central difference methods. Arch Appl Mech 93, 571–603 (2023). https://doi.org/10.1007/s00419-022-02286-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-022-02286-z