
Abstract
Brake noise, in particular brake squeal, is a permanent topic both in industry and academia since decades. Nonlinearities play a decisive role for this phenomenon. One nonlinear effect widely ignored so far is that the brake can engage multiple equilibrium positions with severe consequences on the noise behavior. In fact in an automotive disk brake, the essential elements carrier, caliper and pad are elastically coupled with each other and their behavior is nonlinear that multiple equilibrium positions are possible. The engaged equilibrium position depends, for example, on the initial conditions, external disturbances, and the transient application of the brake pressure, and in consequence configurations with or without self-exciting characteristics of the friction forces result. Obviously, a self-exciting characteristic of the friction force is a necessary precondition for the occurrence of squeal. The authors recently published some corresponding results (Koch et al. FU Mech Eng, 2021. https://doi.org/10.22190/FUME210106020K) demonstrating that for same operating parameters with respect to brake pressure (i.e., brake torque), rotational speed and temperature the engaged equilibrium position has decisive influence whether squeal occurs or not. While in Koch et al. (2021) it has just been detected whether there is squeal or not, the excitation characteristic of the friction forces becomes, beside the engaged equilibrium position, the additional focus in the present paper. Therefore, a work criterion already successfully applied in earlier publications for squeal tendency is considered. For the experimental application of the work criterion, accelerometers have to be mounted. The accelerometers’ location to be applied can be determined in the chosen setup by the camera system anyway necessary for the measurement of the engaged equilibrium position. With this refined setup, it is possible to specify the states squeal, close to squeal and far from squeal. The test series again demonstrate the decisive influence of the engaged equilibrium position (for constant operation parameters) on the occurrence of the respective state. These findings can have consequences for simulations (consideration of multiple equilibrium positions in models and respective linearization with consequences on system’s eigenvalues), but also for the design (avoidance of equilibrium positions suspicious for squeal) and experimental setups (determination of special positions) of brakes.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Acceleration and deceleration are inevitable while operating vehicles [1]. Braking as an action of intentional deceleration is of utmost significance for the safety of all traffic participants, but beside the longitudinal dynamics of vehicles there are several other problems in brakes related to dynamics, e.g., vibrations and noise.
Especially the high-frequent brake squeal is a subject of permanent interest in industry and also in academia. This pertains to all types of frictional brakes like disk, drum or block brakes and corresponding applications especially from traffic like automotive, commercial vehicles or railway. Even if squeal is primarily a comfort problem only and not a safety problem, an enormous development and testing effort has been made for many decades. Kinkaid and O’Reilly [2] and Sinou et al. [3] give an overview of related problems. The SAE standard J2521 is widely used as a procedure for the experimental classification of squeal behavior. Corresponding squealing events are therein categorized as brake squeal or not by regarding the noise level.
The predictive character of brake squeal simulation has so far been and is still limited. It requires a large number of experimental investigations. The change of the operation parameters, especially brake pressure, i.e., brake torque, brake disk rotational speed and temperature, has an enormous influence on the squealing behavior. This means that a large number of tests must be carried out in order to take each parameter combination into account. As described, for example, in [4,5,6], the difficult situation is further complicated by the fact that, despite identical operation parameters, squealing sometimes occurs and sometimes not. In [4, 5], this is related to forward/backward driving and corresponding positions of the brake components, while other reasons like subcritical Hopf bifurcations as, for example, in [6] are also possible.
In the following, we will focus on the importance of the equilibrium positions. Hereby, the way to simulate brake squeal is described first. Following the state of the art, simulation of brake squeal is based on finite element (FE) models, where the analysis is divided basically into the following steps [7]. Starting with a nonlinear contact analysis, an, in general only one, equilibrium position is determined, which is established by applying the brake pressure quasi-statically. In contrast to this, because the system is nonlinear, multiple equilibrium positions for constant operation parameters are possible, which is confirmed by our experimental investigations, see Sect. 2 and [8]. As already described, in [5] large deviations of equilibrium positions are encountered for forward and backward driving. Nevertheless, following the state of the art in FE simulations, the linear equations of motion are obtained by linearizing with respect to the one determined equilibrium position, and all subsequent steps are therefore based on this solely considered equilibrium position. This linear model is then used for a complex eigenvalue analysis (CEA). As a result of the CEA, the modes with positive real parts of the corresponding eigenvalues are considered as potential squeal candidates, e.g., [9]. Compared to these FE models with a large number of degrees of freedom, some basic noise properties of brakes can also be described by minimal models containing, for example, two degrees of freedom. In [10], a linear minimal model of a brake is extended by nonlinearities in such a way, that depending on the equilibrium considered, a different stability as well as limit cycle behavior can be observed.
A prerequisite for positive real parts of eigenvalues is that the model used considers the mechanism of self-excitation due to the frictional forces between the pad and the disk. This mechanism must contain, if leading to self-excited vibrations, an energy transfer from an energy source to the considered vibration system. In modeling, this source is in general “inexhaustible”, e.g., by the assumption of a constant rotational speed. This energy transfer, which is included, but in general not separately regarded in standard procedures, is of fundamental significance for the existence of brake squeal and in the following considered by the introduced work criterion with respect to the friction forces.
One other crux of the state-of-the-art simulation, however, is that the linear instability characteristic with amplitudes increasing infinitely with time does not correspond to the more or less stationary behavior observed in experiments and in everyday experience of squeal, where we have distinct frequencies and finite amplitudes. In conclusion, brake squeal can only be represented by nonlinear models [11]. In this consideration, nonlinearities limit the increasing oscillation caused by self-excitation, which finally ends in a limit cycle [6, 11]. Therefore, nonlinearities resulting in the limitation of the increasing vibration are essential if the “real” brake squeal, i.e., the limit cycle, should be obtained in frequency, amplitude and sound radiation, and therefore, these nonlinearities are considered by a number of authors and publications [12,13,14,15]. For example, in [6] it is shown that the mode shape with the largest positive eigenvalue is not necessarily the one resulting in the limit cycle and therefore the squeal event.
However, there is at least one other key influence of nonlinearities as shown in [8], namely the equilibrium position engaged by the brake during braking. In [8], it has been experimentally investigated and proven that despite identical operation parameters, the disk brake can engage different equilibrium positions with essential consequences on the noise behavior. Just by changing the initial conditions, different equilibrium positions can be achieved with the same operation parameters and in some equilibrium positions the brake squeals and in others not.
The present paper continues the work described by the authors in [8] by additionally considering the work of the friction forces as the source of self-excited vibrations by a corresponding work criterion. The work of the friction forces during a vibration cycle, for example, has been fundamentally considered in an academic friction oscillator, e.g., in [16], and has been applied experimentally to disk brakes, e.g., in [17,18,19]. Compared to the previously used squeal indicator (band acceleration level) in [8], the work criterion not only detects vibrations exceeding certain levels (i.e., squeal) but is also capable to identify states close to squeal, where the friction forces already excite, i.e., transfer energy from the rotation of the disk into the brake, but system damping predominates this effects. There are also some attempts, e.g., in [20], to apply the work criterion also in simulations which substantiates the physical reasons and understanding of the self-excitation but does not give—in contrast to corresponding experimental investigations—new information on the system’s behavior as eigenvalues, eigenshapes or limit cycles have to be calculated in advance before the work of the friction force can be calculated. Corresponding attempts were also presented in a separate session at the EuroBrake Conference 2017 entitled: “Squeal—Energy Balance Approach”.
Based on these fundamental findings, it is possible to introduce a modified experimental procedure compared to [8] to examine a brake for its squealing tendency with respect to engaged equilibrium positions and, if necessary, to identify and as a consequence constructively adjust positions with a low squealing tendency already during the development phase of new brake generations. For this purpose, the setup and results from [8] are first recapitulated. Subsequently, the work criterion from [18] is introduced as an even more powerful indicator. Critical equilibrium positions can thereby be identified without the necessity of actual squealing during the tests. A number of tests are presented and evaluated, which show that by combining the equilibrium position and the work criterion, it is possible to examine each position for its tendency to squeal and thus identify equilibrium positions non-suspicious for squeal.
2 Test setup and prior results
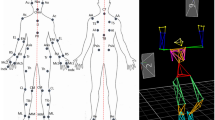
As [8] forms the basis for our current extensions, the most important contents and results are sketched here first. The equilibrium positions with respect to brake squeal can therefore be considered here via the relative distance between several points on the components carrier, pad and caliper. For this purpose, self-adhesive dot markers are stuck onto the respective components. Using a 3D optical measurement system (consisting of two cameras and a lighting system), grayscale images can be captured at 25 frames per second (fps) at maximum resolution. According to [21], the spatial position of the individual point markers is determined from this image sequence using digital image correlation, and the distances between the point markers are determined from this. The setup is supplemented on the one hand by an additional camera, which has in [8] required only for setting the initial conditions, and on the other hand by accelerometers attached on pad, carrier and caliper, a temperature sensor and an angle sensor on the rotating disk. Furthermore, the effective braking torque is determined using strain gauges on the drive shaft. All signals are recorded simultaneously and synchronized with the information from the image sequence. In addition to the positions, the braking torque and the rotational angle of the brake disk are also recorded during the measurements. Compared to the position measurements, which are recorded every 0.04 s corresponding to 25 fps, the other measured signals allowed significantly higher sampling rates. Therefore, the mean value of these signals is calculated every 0.04 s. Figure 1 shows the test bench used in [8].
In contrast to the SAE standard J2521, in [8] no microphone is used to detect squealing events, but the band acceleration level \(L_{\mathrm{a}}\) is determined from the acceleration signals and used as a criterion according to [23]. This naturally requires that the squealing frequency is known in advance. The evaluation is also done every 0.04 s. The use of the band acceleration level as a squeal indicator was based on the fact that an acoustic measurement of the squealing event with a microphone does not allow reliable measurement results to be obtained by the available academic test bench in contrast to commercial test benches, as found in industry.

Figure 2 is an example of the findings from [8]. The underlying measurement procedure was as follows. First, varying initial conditions were adjusted by overlaying the current position with a reference image using the additional camera when the brake is at a standstill. Then, the engine was switched on, a constant rotational speed adjusted, a constant braking torque applied and the measurement started. This procedure was repeated several times, and each time a new measurement was made. For each of these measurements, the initial conditions were slightly varied. Figure 2 finally contains all the measurements of such a test run. It shows the influence of the engaged equilibrium position by evaluating the distance between one point marker on the pad and one point marker on the caliper visible in Fig. 1b. Details on the chosen points and that consideration of such a simple distance seem to be representative for the noise behavior, which is discussed also in [8]. In Fig. 2, the band acceleration level \(L_{\mathrm{a}}\) as defined in [8] at a specific frequency is visualized as a function of the rotational angle of the disk and the relative position between these two points. This shows that the relative position varies, i.e., varying equilibrium positions are engaged due to varying initial conditions. Additionally, it is found that for a given rotational angle of the disk, the squealing tendency depends on the relative position/engaged equilibrium position. On the one hand, there are solely blue colored areas with respect to a complete rotation, i.e., the brake never squealed. In contrast, for some distances/engaged equilibrium positions there are distinct red colored areas where the brake squealed repeatedly during the turning. Constant squealing during the whole turnings was not reached in these experiments. These distinct areas, in which the squeal indicator is high, show the strong dependence of the squeal behavior on the engaged equilibrium positions represented by the distance. In these areas, the brake squealed at 2.65 kHz.

Figure 13c from [8]: Influence of the relative distance/engaged equilibrium position on the squealing behavior for constant braking torque M, rotational speed v and temperature T considering the distance between point markers on the pad and on the caliper (with band acceleration level \(L_{\mathrm{a}}\) as squeal indicator). The examined squealing frequency was 2.65 kHz. [24]
With this form of visualization, fundamental insights into the influence of engaged equilibrium positions as a function of varying initial conditions could be demonstrated. The focus in [8] was to show that a particularly large number of engaged equilibrium positions with different squealing tendencies can occur with constant and identical operation parameters for braking torque, rotational speed and temperature. Parameters were specifically adjusted that resulted in squealing at the known squealing frequency of 2.65 kHz.
Drawbacks of this evaluation procedure via band acceleration level are that the potential squealing frequency has to be known in advance and that experience shows that there is a high sensitivity of the band acceleration level on the chosen positions of the accelerometers. The aim of this paper is to combine the idea of determining experimentally the work of the friction force as in [18] with determining the engaged equilibrium position during braking as in [8] and thereby confirming the influence of the engaged equilibrium position on the noise behavior. Applying the work criterion requires also mounting of accelerometers as will be described in the following section.
As an outcome of [8], it seems not to be necessary to capture completely absolute positions of the brake parts but to measure just relative distances as applied in Fig. 2. In the following, only the distance from a point on the pad (\(P_1\)) to a point on the caliper (\(P_2\)) is evaluated as an example (cf. Fig. 3b). Therefore, a complex optical 3D measuring system as in [8] was not any more mandatory. Hence, the test bench from [8] was reduced to the solely use of the Photron FASTCAM Mini AX100 with a resolution of 1024 by 1024 pixels. In contrast, a separate lighting system was used. Figure 6a shows the modified test bench. As in [8], the distances between the observed points are determined using digital image correlation. However, due to the lower resolution in comparison with a 3D optical measurement system, point markers with an inner diameter of 3 mm were used, instead of 1.5 mm in [8]. In the test series presented here, as in [8], the clamp connecting the carrier and caliper in the serial brake setup was omitted. Nevertheless, similar effects on the influence of engaged equilibrium positions can also be observed with the clamp mounted. Finally, for this chapter, some comments on stationary versus transient behavior shall be given. In general, real brakes in vehicles are undergoing transient behavior on different aspects and corresponding time-scales as wear, temperature, humidity or thermodynamic effects. In general, some of these effects also occur at a test bench. Therefore, the almost stationary states considered in this paper are only a “spotlight” with respect to effects taking place at slower time scales, while possible effects taking place at faster time scales cannot be considered. To ensure the as far as possible stationary character of the measurements beside the already mentioned operation parameters, a spot check was made to determine whether the engaged equilibrium position at the beginning of a measurement differs from that at the end. No significant change could be detected.

a Overview of the test bench with camera and lighting system and b the field of view of the camera with the points \(P_1\) (pad) and \(P_2\) (caliper) to determine the engaged equilibrium position. The direction of rotation of the brake disk is counterclockwise. [25]
3 Work criterion
3.1 Basic idea of the work criterion
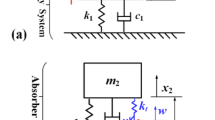
The basic idea of the work criterion goes back to considering the work of the friction force during one vibration cycle of an oscillating pad, represented by a point mass, in frictional contact with a belt moving with constant velocity, e.g., in [16]. In that simple model, the pad, connected to the fixed environment with a linear spring, oscillates harmonically along the belt and a time-dependent normal force N applies. Macroscopically in brake squeal no stick-slip, but pure sliding occurs, i.e., the belt moves much faster than the pad in any moment. If the normal force is also oscillating harmonically (in general with a positive large mean value compared to the oscillation amplitude, in reality resulting from the static brake pressure) with same frequency in phase with the movement of the pad or constant, the resulting work of the friction force on the pad within one period is zero. Compared to this, the work of the friction force with respect to the belt is always negative and in general of much higher order (i.e., the friction force detracts energy from the belt, the brake brakes). If there is a phase shift between normal force and the in plane movement of the pad, the resulting work can differ from zero, i.e. depending on the sign, the pad oscillations are either reduced or excited by transferring energy from the pad to the belt (vibration reduction) or vice versa (vibration excitation).

a Applied minimal model for the work criterion (cf. [16, 18]) with components pad (1), moving belt (2) and moving environment (3) [26]. b Investigated brake with the components pad (1), brake disk (2) and carrier (3) [27]. Points A to D mark the four possible pads to carrier contact areas in the circumferential direction. Point C is the contact for all test series in this paper
In a number of publications, e.g., [17, 18, 28] it has been shown that these simple model assumptions—with some modifications—are in fact applicable to real brakes. Also, it was found especially in [17, 18] that positive work can detect potential squealing frequencies without the necessity that the brake actually squeals during these measurements. These states are in the following called close to squeal states.
Figure 4a shows the minimal model considered here, slightly modified compared to [18], with the essential components pad (1), moving belt (2) and the flexible connection of the pad to the moving environment (3). Herein, \(q_{\mathrm {c}}(t)\) is the movement of the carrier contact point with the pad, which is in fact not a rigid bearing point but is also flexible. Figure 4b illustrates the transition from this minimal model to the real brake. In the real brake in Fig. 4b (1) corresponds to the pad, (2) to the disk and (3) to the carrier. The fluctuating normal force mainly results from the dynamics of the caliper. In the investigated industrial floating caliper with the turning direction sketched in Fig. 4b, the pad may push (contact in point A) and/or pull the carrier (contact in C). As pad and carrier are connected together with backlash, for low and moderate brake pressures the only contact is in C. For large brake pressures, there may be also contact at both sides at the same time, but as brake squeal is related to low brake pressures, this case was not observed here, so C was the only contact point for all results shown here. For inverted turning direction the contact point changes to B, for large brake pressures added by D. One big advantage of the actual setup compared with [17, 18] is that also the contact points can be determined during the measurements from the camera, at least for the front pad.
As a result, transferring the model from Fig. 4a to the real brake, \(q_{\mathrm {c}}(t)\) describes the carrier movement close to the contact point C, while \(q_{\mathrm {p}}(t)\) describes the pad circumferential movement. c describes the stiffness of the connection of these two points. In fact, this stiffness is, as in the prior works [17, 18], not identified, and the work of the friction forces during one vibration cycle, calculated by the procedure described in the following, is normalized by this stiffness.
Following the concept in [18], we consider in the non-squealing case ambient vibrations, i.e., particularly vibrations excited by the operation of the test bench. The vibrations \(\ddot{q}_{\mathrm {c}}(t)\) and \(\ddot{q}_{\mathrm {p}}(t)\) can be recorded by correspondingly placed accelerometers, and the signals will in general contain combinations of the system’s eigenshapes with corresponding eigenfrequencies. Performing corresponding Fourier analysis, the phase shifts can then be calculated for the contained shapes and frequencies, and therefore, in combination with the evaluation of the sign of the work the potential squealing frequencies can be identified. Transfer of energy from the rotating disk to the other parts of the brake system is a necessary precondition for the occurrence of squeal. Therefore, squealing is limited only to certain vibration shapes and corresponding frequencies with fitting phase shifts transferring energy from disk rotation into the system. In fact, the work of the friction force with respect to the pad can be positive, i.e., self-excitation occurs, even in cases without squeal. Squeal will only occur, if system’s damping does not predominate the excitation via friction force in the engaged equilibrium position. This does not necessarily prerequisite an unstable equilibrium position. Alternatively, squeal can also occur in the case of coexisting stable limit cycle and stable equilibrium position if the initial conditions lead to the limit cycle, but positive work of the friction force with respect to the pad is always a necessary prerequisite for squeal.
3.2 Actual application of the work criterion to the front pad
Based on the described theoretical background, an experimental implementation was developed and described, e.g., in [17, 18]. Thereby the friction force acting on the pad can be determined as a function of \(q_{\mathrm {p}}(t)\), \(q_{\mathrm {c}}(t)\) and c by cutting free the pad and dynamically balancing the forces in horizontal direction. Multiplying this force with the actual velocity \({\dot{q}}_{\mathrm {p}}(t)\), we get the actual power of the friction force. Assuming harmonic motion of pad \(q_{\mathrm {p}}\) and carrier \(q_{\mathrm {c}}\)
with circular frequency \(\varOmega \), phase \(\varphi _{\mathrm {p}}\) resp. \(\varphi _{\mathrm {c}}\), and displacement amplitude \({\hat{q}}_{\mathrm {p}}\) resp. \({\hat{q}}_{\mathrm {c}}\), the work of the friction force during one period \(\Delta W\) is calculated by integrating the power accordingly. As already mentioned, the stiffness c in the model would be very hard to identify. Therefore, we consider in the following solely instead of \(\Delta W\) the normalized work \(\Delta {\tilde{W}}_{*}\) which we obtain by dividing \(\Delta W\) by c and multiplying it by \(\varOmega ^{4}\). The factor \(\varOmega ^{4}\) results from the direct usage of the acceleration amplitudes \(\hat{\ddot{q}}_{\mathrm {p}}(\varOmega )\) and \(\hat{\ddot{q}}_{\mathrm {c}}(\varOmega )\) instead of the displacement amplitude.
Following the described procedure, \(\Delta {\tilde{W}}_{*}\) is determined by
and
i.e., the physical dimension of \(\Delta {\tilde{W}}_{*}\) is \(\hbox {m}^{2}\)/\(\hbox {s}^{4}\). As a result, the accelerations \(\ddot{q}_{\mathrm {p}}(t)\), \(\ddot{q}_{\mathrm {c}}(t)\) have to measured and to be analyzed with respect to frequency, amplitude and phase in order to determine \(\Delta {\tilde{W}}_{*}\).
By comparing now different \(\Delta {\tilde{W}}_{*}\), we consider c implicitly to be constant. This seems to be acceptable as the main property of \(\Delta {\tilde{W}}_{*}\) is the sign. Positive sign of \(\Delta {\tilde{W}}_{*}\) denotes shapes and frequencies, where we have self-excitation, i.e., the necessary tendency for squeal is fulfilled, while negative signs denote damping of the corresponding vibrations. As a consequence of damping, the corresponding vibration part dies out, so that the observed corresponding values of \(\Delta {\tilde{W}}_{*}\) are close to zero (instead of being negative).
Before applying the work criterion as a squeal indicator, the sensitivity of the position of the accelerometers should be briefly described to clarify the progress and differences of the actual procedure compared to [8]. Figure 5 shows, by an example, that the band acceleration level \(L_{\mathrm{a}}\) used in [8] as indicator may differ depending on the position of the accelerometer. To illustrate this, a single measurement from Fig. 2 is considered separately. For this purpose, \(L_{\mathrm{a}}\) is determined on the one hand with an accelerometer positioned on the carrier (\(\ddot{q}_{\mathrm {c}}(t)\), Fig. 5a) and on the other hand with one positioned on the pad (\(\ddot{q}_{\mathrm {p}}(t)\), Fig. 5b). Squealing noise occurred during this measurement at 2.65 kHz.

Dependency of the band acceleration level \(L_{\mathrm{a}}\) at the frequency of 2.65 kHz on the selected acceleration sensor using the example of a single measurement from Fig. 2 for \(\ddot{q}_{\mathrm {c}}(t)\) (a) and \(\ddot{q}_{\mathrm {p}}(t)\) (b)
The basic statement about the squealing tendency remains the same in both cases. However, the significance depends on the positioning of the sensors on the brake. Both plots show for a rotational angle around \(240^{\circ }\) a rising band acceleration level \(L_{\mathrm{a}}\), but with different intensity of the squealing event. In the following, the work criterion is applied instead of the band acceleration level as a squeal indicator.
The same single measurement from Fig. 5 is now re-evaluated with the work criterion as the squeal indicator, i.e., phase and amplitude of the two accelerometer signals \(\ddot{q}_{\mathrm {p}}(t)\), \(\ddot{q}_{\mathrm {c}}(t)\) are introduced in Eq. (3) for the respective circular frequencies. The corresponding result in Fig. 6a naturally confirms the squealing tendency of this engaged equilibrium position as Fig. 5a. While the band acceleration level \(L_{\mathrm{a}}\) is limited to a—previously determined—very small frequency range, we can consider here a wide range of frequencies. For this purpose, the information about the rotational angle is replaced by a frequency range between 1 and 7 kHz in Fig. 6b. Red areas indicate a relatively high positive work and therefore squealing tendency or, depending on the combination of the parameters brake torque, rotational speed and temperature, in the actual case even audible squealing. With these considerations, it can also be confirmed that 2.65 kHz is the only squealing frequency in this test.

However, states close to squeal or squeal can always be distinguished from states far from squeal. In Figs. 5 and 6, a case with squeal was considered. But as we will see in Sect. 4, the work criterion also allows, as earlier in this section in the theoretical part described, the determination of close to squeal states. With this display format, each engaged equilibrium position can now be examined for its tendency to squeal and specific areas can be identified that do not lead to squeal for certain parameter combinations.
3.3 Rear pad
To calculate or measure the complete work of the friction forces as a measure for the energy transferred from the disk rotation, both pads, i.e., the front and the rear ones, have to be considered. All considerations so far have been done for the front one, which is easily visible, and therefore, the used optic measurement system can easily be applied for this pad. There are at least two potential problems, when also the rear pad is considered.
First: the mentioned point C as contact from pad to carrier probably also applies to the rear pad. Unfortunately, due to the positioning, however, it is not possible to prove this by the applied camera. Nevertheless, it seems reasonable that the respective point C is also the contact point for the rear pad, as this is the aim of the brake design for this turning direction at low/moderate brake pressures, and it is proofed for the front pad by the camera. Remembering the descriptions in Sect. 3.1, this has consequences for the positioning of the accelerometers. As a consequence, \(A_1\) to \(A_4\) as shown in Fig. 7 are the chosen positions for the accelerometers for pads and the carrier (correspondingly at the rear side), and they are aligned according to the coordinate system in Fig. 3b. The second problem is due to the normalization of the work by the stiffness c in (2), which may differ for the two pads. In fact, while the two pads are almost identical, the carrier is probably much stiffer on the piston side (rear) than on the finger side (front). This excludes a simple summation of the terms \(\Delta {\tilde{W}}_{*}\) for both pads. Therefore, for the later evaluation, only the front pad is considered. Due to our experience, the sign of the two \(\Delta {\tilde{W}}_{*}\) for front and rear pad is the same in most cases and in accordance with the observed noise behavior.

Positioning of the accelerometers a \(A_1\) and \(A_2\) on the front and b \(A_3\) and \(A_4\) on the rear to determine the work for the work criterion
4 Results
Based on this experience, with a total of four test series, it is demonstrated in the following that it is possible, applying the procedure described in Sect. 3, to identify multiple engaged equilibrium positions corresponding to the following different squealing tendencies:
-
with audible squeal (test series 1),
-
far from audible squeal state (test series 2),
-
close to squeal state without audible squeal (test series 3), and
-
close to squeal state without audible squeal, but different potential squealing frequency compared to test series 3 (test series 4).
These tendencies are essentially achieved only by different initial conditions resulting in equilibrium positions and varied braking torques, as there are already several experiences on the investigated brake’s behavior [8].
In test series 1 (Fig. 8a), the applied operation parameter set braking torque is \(M \approx 99\) Nm (equivalent to 2.9 bar brake pressure), rotational speed \(v = 29.2\) rpm and temperature \(T \approx 40\,^\circ \)C. The engaged equilibrium positions led to audible squealing in all measurements. An area of positive \(\Delta {\tilde{W}}_{*}\) at a frequency of approximately 4.62 kHz is clearly visible in Fig. 8a and confirms the observed squeal event. Compared to earlier results presented here and in [8] operation parameters were chosen leading to a differing squealing frequency. For other frequencies, \(\Delta {\tilde{W}}_{*}\) is approximately zero in test series 1. In contrast to squeal in test series 1, states far from squeal are set in test series 2 (Fig. 8b). For this purpose, the braking torque was reduced to \(M \approx 80\) Nm and other initial conditions were adjusted, resulting in different equilibrium positions, i.e., distances in Fig. 8a and b. No squeal was audible during any of the measurements. Correspondingly, Fig. 8b shows almost vanishing \(\Delta {\tilde{W}}_{*}\) for the entire frequency range without exception.

a Result from test series 1, squeal state with audible squeal event of 4.62 kHz. b Results from test series 2, far from audible squeal, with lower braking torque and different engaged equilibrium positions/distances compared to test series 1
For test series 3 (Fig. 9a), the same operation parameters are used as for test series 2, but with the initial conditions of test series 1. This leads to the similar distances as in test series 1. \(\Delta {\tilde{W}}_{*}\) is positive at 4.62 kHz, but without audible squeal. This is obviously a close to squeal state.
In test series 4, a completely different set of operation parameters with braking torque \(M \approx 44\) Nm, rotational speed \(v = 36.0\) rpm and temperature \(T \approx 35\,^\circ \)C as well as other initial conditions was applied. Figure 9b shows the corresponding results. There is again a distinct range of positive work \(\Delta {\tilde{W}}_{*}\) for the engaged equilibrium position. This time, however, this takes place at a frequency of 2.65 kHz, which is the squealing frequency of this brake known from [8].

a Results from test series 3, close to squeal state with positive \(\Delta {\tilde{W}}_{*}\) at 4.62 kHz but without audible squeal for the operation parameter set from test series 2 (no squeal, no excitation) but engaged equilibrium positions/distances as in test series 1. b Results from test series 4 as another example of a close to squeal state, but with a different operation parameter set. Positive \(\Delta {\tilde{W}}_{*}\), i.e., excitation by the friction forces, at 2.65 kHz (known as squealing frequency from [8]) but again without audible squealing event. Equilibrium positions/distances as in previous test series 1 and 3
In [8], we focused on the basic observation, that, for the same set of operation parameters, different equilibrium positions can be engaged, resulting in squeal or non-squeal. This was added in the present paper by the consideration of the work criterion capable also to identify close to squeal states by positive work of the friction forces. An additional comparison of the results of test series 2 and 3 shall again demonstrate that the engaged equilibrium at specific constant operation conditions is decisive for the characteristics of the friction force. For this purpose, Figs. 8b and 9a are plotted together in Fig. 10.

Comparison of the engaged equilibrium positions for test series 2 with distances at approx. 13.09 mm and for test series 3 with distances of approx. 13.2 mm. The squealing tendency obviously depends on the engaged equilibrium position/distance

Comparison of the different engaged equilibrium positions for test series 2 (green, far from squeal) and test series 3 (red, close to squeal) considering six points in detail. For bottom contact points \(P_1\) (pad), \(P_2\) (caliper), and additionally \(P_3\) (carrier) are considered
Finally, it shall be discussed a bit more in detail, what are the differences between the engaged equilibrium positions, resulting in such changes in the characteristics of the friction forces. We argued in Sect. 2 that due to our experience considering the distance of the two points \(P_1\) (pad) and \(P_2\) (caliper) is enough for displaying the results. As can be seen in Fig. 10, only 0.11-mm difference in distance distinguishes two positions of far from squeal and close to squeal. Of course, reality is much more complex and the engaged equilibrium position is defined by more than these two points \(P_1\) and \(P_2\) (which are not identical to the positions of the accelerometers). In general, the involved bodies perform complex spatial displacements, where the movement of distinct points can be observed in 2D by the measurement setup. Therefore, already in [8] a total of six points were distributed to the essential components pad, carrier and caliper in order to be able to determine the distance between these components both at the top and at the bottom of the brake. In Fig. 11, the engaged equilibrium positions and the distances at top/bottom are plotted as lines directly in the image (stemming from test series 3) in comparison with a representative position engaged in test series 2 (green) and 3 (red). Top and bottom areas are shown enlarged. On the one hand, it shows that the two engaged equilibrium positions are clearly different from each other, and on the other hand, that the displacement shifts of the points are much larger than the change in relative distance considered in the previous results.
5 Summary and outlook
The present work continues the findings from [8] on the significant influence of engaged equilibrium positions on the squealing behavior of automotive disk brakes. Due to system’s nonlinearities, the brake can engage multiple equilibrium positions even for constant operation parameters. This effect and its influence on noise behavior are not taken into consideration in state-of-the-art examinations.
In [8], the only difference was made between squeal and non-squeal by using a band acceleration level at fixed frequency. This work is enlarged in the present paper, in that way, that a work criterion for the friction forces is applied, which allows also the detection of close to squeal states. These are states, where the friction forces transfer energy from the rotation of the disk into vibration of the brake parts, but dissipation effects predominate so that no squeal occurs. With the work criterion, it is now possible to evaluate each engaged equilibrium position with regard to its squealing tendency for a wide frequency range. States being suspicious for squeal and corresponding frequencies can be identified without the necessity that the brake really squeals.
Basically, the test setup requires a camera system being capable for determining the engaged equilibrium position and two accelerometers for determining a measure proportional to the work of the friction forces on one pad. The currently used test bench differs from [8] in that way, that it does not use an optical 3D measuring system but only a single camera. Despite this change, it is still possible to adjust any initial conditions. In addition, only the distance between the pad and the carrier at the bottom was used to determine the engaged equilibrium position instead of the previous six possible distances from [8]. The evaluation process was finally supplemented by the work criterion.
In the results of test series presented here, the influence of the engaged equilibrium positions and operation parameters was determined, and states of squeal, far away from squeal and close to squeal, could be identified as well as multiple potential and real squealing frequencies.
The authors believe that the present findings can have beneficial consequences for the design of brakes, simulations of squeal and experimental brake test setups. With respect to the design of the brake, the conclusion is that the avoidance of certain equilibrium positions by design could be helpful. As an example for this, the clamps already used in industry to fix the caliper to the carrier could be adapted to appropriate equilibrium positions. In simulations, in most cases performed by FE analysis, nonlinearities are considered in static analysis, but as a consequence also multiple equilibrium positions—which, as experiments show, are obviously possible—should be considered. Performing the dynamic CEA for the thereby linearized multiple systems of equations of motion could help to reproduce the experimentally observed influence of the engaged equilibrium position also in simulations. Finally, it could be helpful to integrate measurement procedures for the engaged equilibrium position and maybe also the work criterion into standard test runs of brakes.
References
Bokare, P.S., Maurya, A.K.: Acceleration–deceleration behaviour of various vehicle types. Transp. Res. Proc. 25, 4733–4749 (2017)
Kinkaid, N.M., O’Reilly, O.M., Papadopoulos, P.: Automotive disk brake squeal. J. Sound Vib. 267, 105–166 (2003)
Sinou, J.-J., Loyer, A., Chiello, O., Mogenier, G., Lorang, X., Cocheteux, F., Bellaj, S.: A global strategy based on experiments and simulations for squeal prediction on industrial railway brakes. J. Sound Vib. 332(20), 5068–5085 (2013)
Stump, O., Könning, M., Seemann, W.: Transient squeal analysis of a non steady state maneuver. In: Proceedings of EuroBrake (2017)
Stump, O., Nunes, R., Häsler, K., Seemann, W.: Linear and nonlinear stability analysis of a fixed caliper brake during forward and backward driving. Int. J. Acoust. Vib. 141(3), 2161–9611 (2019)
Gräbner, N.: Analyse und Verbesserung der Simulationsmethode des Bremsenquietschens. Technische Universität Berlin, Ph.D. thesis (2016)
Intes: PERMAS User’s Reference Manual. Stuttgart INTES Publication No. 450 (2012)
Koch, S., Köppen, E., Gräbner, N., von Wagner, U.: On the influence of multiple equilibrium positions on brake noise. FU Mech. Eng. (2021). https://doi.org/10.22190/FUME210106020K
Ouyang, H., Nack, W., Yuan, Y., Chen, F.: Numerical analysis of automotive disc brake squeal: a review. Int. J. Veh. Noise Vib. 1(3–4), 207–231 (2005)
Ganji, H.F., Ganji, D.D.: Effects of equilibrium point displacement in limit cycle oscillation amplitude, critical frequency and prediction of critical input angular velocity in minimal brake system. AIP Adv. 7(4), 045102 (2017)
Hochlenert, D., von Wagner, U.: How do nonlinearities influence brake squeal?, SAE Tech. Pap. 2011-01-2365, 179-186 (2011)
Kruse, S., Tiedemann, M., Zeumer, B., Reuss, P., Hoffmann, N., Hetzler, H.: The influence of joints on friction induced vibration in brake squeal. J. Sound Vib. 340, 239–252 (2015)
Massi, F., Baillet, L., Giannini, O., Sestieri, A.: Brake squeal: linear and nonlinear numerical approaches. Mech. Syst. Signal Process. 21(6), 2374–2393 (2007)
Koch, S., Gräbner, N., Gödecker, H., von Wagner, U.: Nonlinear multiple body models for brake squeal. PAMM 17(1), 33–36 (2017). https://doi.org/10.1002/pamm.201710010
Oberst, S., Lai, J.C.S.: Nonlinear transient and chaotic interactions in disc brake squeal. J. Sound Vib. 342, 272–289 (2015)
Popp, K., Rudolph, M., Kröger, M., Lindner, M.: Mechanisms to generate and to avoid friction induced vibrations. VDI Ber. 1736(1), 1–15 (2002)
Schlagner, S.: Schnelle,: Charakterisierung des Geräuschverhaltens von KFZ-Scheibenbremsen. Technische Universität Berlin, Ph.D. thesis (2010)
Gödecker, H.: Ein Verfahren zur schnellen experimentellen Charakterisierung der Quietschneigung von Kfz-Scheibenbremsen. Technische Universität Berlin, Ph.D. thesis (2015)
Stegmann, P., Kruse, S., Augsburg, K.: Robustness of disc brake systems regarding squeal. In: Proceedings of EuroBrake (2015)
Zhang, Z., Oberst, S., Lai, J.C.S.: A non-linear friction work formulation for the analysis of self-excited vibrations. J. Sound Vib. 443, 328–340 (2019)
Sutton, M.A., Orteu, J.J., Schreier, H.: Image correlation for shape, motion and deformation measurements: basic concepts, theory and applications, p. 321. Springer, Berlin (2009)
Koch, S.: Details test bench with optical 3D measuring system, figshare. Figure, Dataset (2021). https://doi.org/10.6084/m9.figshare.13663631.v1
Beranek, L.L., Ver, I.L.: Noise and Vibration Control Engineering: Principles and Applications, vol. 966. Wiley, Hoboken (1992)
Koch, S.: In: figshare. Figure, Dataset, (ed.) equilibrium positions (2021). https://doi.org/10.6084/m9.figshare.13673059
Koch, S.: Test bench work criterion, figshare. Figure, Dataset (2021). https://doi.org/10.6084/m9.figshare.14892105.v1
Koch, S.: Applied minimal model for the work criterion, figshare. Figure, Dataset (2021). https://doi.org/10.6084/m9.figshare.14892120.v1
Koch, S.: Real brake for applied work criterion, figshare. Figure, Dataset (2021). https://doi.org/10.6084/m9.figshare.14892126.v1
Hochlenert, D.: Selbsterregte Schwingungen in Scheibenbremsen: Mathematische Modellbildung und aktive Unterdrückung von Bremsenquietschen. Technische Universität Darmstadt, Ph.D. thesis (2006)
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Koch, S., Gödecker, H. & von Wagner, U. On the interrelation of equilibrium positions and work of friction forces on brake squeal. Arch Appl Mech 92, 771–784 (2022). https://doi.org/10.1007/s00419-021-02071-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-021-02071-4