
Abstract
We derive analytical solutions for the uniaxial extension problem for the relaxed micromorphic continuum and other generalized continua. These solutions may help in the identification of material parameters of generalized continua which are able to disclose size effects.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In this paper we continue our investigation of analytical solutions for the isotropic relaxed micromorphic model (and other isotropic generalized continuum models). It follows our recent exposition of analytical solutions for the simple shear [28], bending [25], and torsion problem [13, 27]. Here, we consider the uniaxial extension problem, which, in classical isotropic linear elasticity, allows to determine the size-independent longitudinal modulus \(M_{\text {macro}}=\lambda _{\text {macro}}+2\mu _{\text {macro}}\).
Here, we show the genealogy tree of the generalized continuum models:

The strain gradient theory and second gradient theory are equivalent [1, 17] and contain additionally the couple stress theory as a special case. Using the \(\mathrm{Curl}\) as primary differential operator for the curvature terms allows a neat unification of concepts.
For some of the traditional models, uniaxial extension gives still rise to size effects in the sense that thinner samples are comparatively stiffer which can also be found experimentally [34,35,36]. In that case, the inhomogeneous response is triggered by the boundary conditions for the additional kinematic fields which are applied at the upper and lower surface. We refer the reader to the introduction of [25, 27, 28, 32] concerning the relevance of the scientific question as well as its importance for the determination of material parameters for generalized continua [33]. Indeed, the obtained analytical formulas can be used to determine size-dependent and size-independent material parameters. The notation follows that of [25, 27, 28]. We recapitulate shortly.

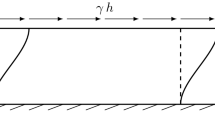
Sketch of an infinite stripe of thickness h subjected to uniaxial extension boundary conditions
The paper is now structured as follows. We start with a recapitulation of the uniaxial extension problem in the classical linear elasticity. The solution is homogeneous and uniquely determines the longitudinal modulus \(M_{\text {macro}}=\lambda _{\text {macro}}+2\mu _{\text {macro}}\). Then, we consider the isotropic relaxed micromorphic continuum. The boundary conditions for the additional nonsymmetric micro-distortion field \(\varvec{P}\) derive from the so-called consistent coupling conditions
where \(\varvec{\nu }\) is the normal unit vector to the upper and lower surface. It turns out that for zero Poisson modulus on the micro- and meso-scale, \(\nu _{\text {micro}}=\nu _{\text {e}}=0\), respectively, the solution remains homogeneous and no size effects are observed. In the case with arbitrary \(\nu _{\text {micro}},\nu _{\text {e}}\in \left[ -1,1/2\right] \) the solution will be inhomogeneous and size effects appear. The limiting stiffness as the ratio between the thickness and the characteristic length tends to zero (\(h/L_{\text {c}}\rightarrow 0\)) is given by \(\overline{M} = \frac{M_{\text {e}} \, M_{\text {micro}}}{M_{\text {e}} + M_{\text {micro}}}\) which is both smaller than \(M_{\text {micro}}=\lambda _{\text {micro}} + 2\mu _{\text {micro}}\) and \(M_{\text {e}}\) as well greater than \(M_{\text {macro}}=\lambda _{\text {macro}} + 2\mu _{\text {macro}}\).
1.1 Notation
We define the scalar product \(\langle \varvec{a},\varvec{b} \rangle {:}{=}\sum _{i=1}^n a_i\,b_i \in \mathbb {R}\) for vectors \(a,b\in \mathbb {R}^n\), the dyadic product \(\varvec{a}\otimes \varvec{b} {:}{=}\left( a_i\,b_j\right) _{i,j=1,\ldots ,n}\in \mathbb {R}^{n\times n}\) and the Euclidean norm \(\Vert {\varvec{a}}\Vert ^2{:}{=}\langle \varvec{a},\varvec{a} \rangle \). We define the scalar product \(\langle \varvec{P},\varvec{Q} \rangle {:}{=}\sum _{i,j=1}^n P_{ij}\,Q_{ij} \in \mathbb {R}\) and the Frobenius-norm \(\Vert {\varvec{P}}\Vert ^2{:}{=}\langle \varvec{P},\varvec{P} \rangle \) for tensors \(\varvec{P},\varvec{Q}\in \mathbb {R}^{n\times n}\) in the same way. Moreover, \(\varvec{P}^T{:}{=}(P_{ji})_{i,j=1,\ldots ,n}\) denotes the transposition of the matrix \(\varvec{P}=(P_{ij})_{i,j=1,\ldots ,n}\), which decomposes orthogonally into the skew-symmetric part \(\text {skew} \, \varvec{P} {:}{=}\frac{1}{2} (\varvec{P}-\varvec{P}^T )\) and the symmetric part \(\text {sym} \, \varvec{P} {:}{=}\frac{1}{2} (\varvec{P}+\varvec{P}^T)\). The identity matrix is denoted by \({\mathbb {1}}\), so that the trace of a matrix \(\varvec{P}\) is given by \(\text {tr}\varvec{P} {:}{=}\langle \varvec{P},{\mathbb {1}} \rangle \), while the deviatoric component of a matrix is given by \(\text {dev} \, \varvec{P} {:}{=}\varvec{P} - \frac{\text {tr}\left( \varvec{P}\right) }{3} \, {\mathbb {1}}\). Given this, the orthogonal decomposition possible for a matrix is \(\varvec{P} = \text {dev} \,\text {sym} \, \varvec{P} + \text {skew} \, \varvec{P} + \frac{\text {tr}\left( \varvec{P}\right) }{3} \, {\mathbb {1}}\). The Lie-algebra of skew-symmetric matrices is denoted by \(\mathfrak {so}(3){:}{=}\{\varvec{A}\in \mathbb {R}^{3\times 3}\mid \varvec{A}^T = -\varvec{A}\}\), while the vector space of symmetric matrices \(\text {Sym}(3){:}{=}\{\varvec{S}\in \mathbb {R}^{3\times 3}\mid \varvec{S}^T = \varvec{S}\}\). The Jacobian matrix D\(\varvec{u}\) and the curl for a vector field \(\varvec{u}\) are defined as
where \(\times \) denotes the cross-product in \(\mathbb {R}^3\). We also introduce the \(\text {Curl}\) and the \(\text {Div}\) operators of the \(3\times 3\) matrix field \(\varvec{P}\) as
The cross-product between a second-order tensor and a vector is also needed and is defined row-wise as follows
where \(\varvec{m} \in \mathbb {R}^{3\times 3}\), \(\varvec{b} \in \mathbb {R}^{3}\), and \(\varvec{\epsilon }\) is the Levi-Civita tensor. Using the one-to-one map \(\text {axl}:\mathfrak {so}(3)\rightarrow \mathbb {R}^3\) we have
The inverse of axl is denoted by Anti: \(\mathbb {R}^3\rightarrow \mathfrak {so}(3)\).
2 Uniaxial extension problem for the isotropic Cauchy continuum
The strain energy density for an isotropic Cauchy continuum is
while the equilibrium equations without body forces are
Since the uniaxial extensional problem is symmetric with respect to the \(x_2\)-axis, there will be no dependence of the solution on \(x_1\) and \(x_3\). The boundary conditions for the uniaxial extension problem are (see Fig. 1)
The homogeneous displacement field solution \(u_{2} (x_2)\), the gradient of the displacement \(\text {D}\varvec{u}(x_2)\), and the strain energy \(W(\varvec{\gamma })\) for the uniaxial extension problem are
where
is the extensional stiffness (or pressure-wave modulus, longitudinal modulus).
Here and in the remainder of this work, the elastic coefficients \(\mu _i,\lambda _i\) are expressed in [MPa], the coefficients \(a_i\) and the intensity of the displacement \(\varvec{\gamma }\) are dimensionless, the characteristic lengths \(L_{\text {c}}\) and the height h are expressed in meter [m].
3 Uniaxial extension problem for the isotropic relaxed micromorphic model
The general expression of the strain energy for the isotropic relaxed micromorphic continuum is
and the strictly positive definiteness conditions areFootnote 1
where we have the parameters related to the meso-scale, the parameters related to the micro-scale, the Cosserat couple modulus, the proportionality stiffness parameter, the characteristic length and the three dimensionless general isotropic curvature parameters, respectively. This energy expression represents the most general isotropic form possible for the relaxed micromorphic model. In the absence of body forces, the equilibrium equations are then
The ansatz for the micro-distortion \(\varvec{P}(x_2)\), the displacement \(\varvec{u}(x_2)\), and consequently the gradient of the displacement \(\text {D}\varvec{u}(x_2)\) is
It is important to underline that, given subsequent ansatz (14), it holds that \(\text {tr} \left( \text {Curl} \, \varvec{P}\right) =0\). This reduces immediately the number of curvature parameters appearing in the uniaxial extension solution.
The boundary conditions for the uniaxial extension are
Here, the constraint on the components of \(\varvec{P}\) is given by the consistent coupling boundary condition
where \(\varvec{\nu }\) is the normal unit vector to the upper and lower surface.
After substituting ansatz (14) into equilibrium equation (13) we obtain the following four differential equations
where \(M_{\text {e}}=\lambda _{\text {e}}+2\mu _{\text {e}}\) and \(M_{\text {micro}}=\lambda _{\text {micro}}+2\mu _{\text {micro}}\). Being careful of substituting the system of differential equation with one in which Eq. (17)\(_2\) and Eq. (17)\(_4\) are replaced with their sum and their difference, respectively, we have
where \(f_{p} (x_2){:}{=}P_{11}(x_2)+P_{33}(x_2)\) and \(f_{m} (x_2){:}{=}P_{11}(x_2)-P_{33}(x_2)\). It is highlighted that Eq. (18)\(_4\) is a homogeneous second-order differential equation depending only on \(f_{m}(x_2)\) with homogeneous boundary conditions Eq. (15).
The fact that Eq. (18)\(_4\) is an independent equation has its meaning in the symmetry constraint of the uniaxial extensional problem in the direction along the \(x_2\)- and \(x_3\)-axis, which requires that \({P_{11}(x_2)=P_{33}(x_2)}\). From Eq. (18) it is possible to obtain the following relation between \(P_{22}(x_2)\) and \(u_2(x_2)\)
which, after substituting it back into Eq. (18), allows us to obtain the following system of three second-order differential equations in \(u_2(x_2)\), \(P_{22}(x_2)\), and \(f_{p}(x_2)\)
where
It is highlighted that due to positive definiteness conditions (12), \((z_2,z_3)>0\) and \(z_1=0\) if and only if \(\lambda _{\text {micro}}=\lambda _{\text {e}}=0\) (zero Poisson’s ratio case which is studied in Sect. 3.1) and \(\frac{M_{\text {micro}}}{M_{\text {e}}}=\frac{\lambda _{\text {micro}}}{\lambda _{\text {e}}}\). If \(z_1\) is zero, Eq. (20) uncouples completely into three independent differential equations in \(u_2\), \(f_{\text {p}}\), and \(f_{\text {m}}\), respectively.
After applying boundary conditions Eq. (15), the solution in terms of \(u_2(x_2)\), \(P_{11}(x_2)\), \(P_{22}(x_2)\), and \(P_{33}(x_2)\) of system Eq. (20) isFootnote 2
In the above expressions all the quantities are real and well defined due to positive definiteness conditions Eq. (12). Indeed, since the coefficients \(z_1\), \(z_2\), and \(z_3\) may be rewritten in terms of the meso- and micro-bulk and shear modulus as
we can write the expression of \(f_1\) as follows
showing that the positive definiteness of energy (11) implies that \(f_1\) is a strictly positive real number. Moreover, the function \( g:(0,\infty )\rightarrow \mathbb {R}, \qquad g(x):= 1-\frac{4 z_{1}^2}{ z_{2} z_{3}}\,\frac{1}{x} \tanh \frac{x}{2} \) has the asymptotic behavior
and it is monotone increasing since its first derivative is given by
which it is positive for all \(x\in (0,\infty )\). Hence, it follows that due to the positive definiteness of the elastic energy
which implies that
which completes our proof that all the quantities from (22) are real and well-defined.
The strain energy associated with this solution is
The plot of the extensional stiffness \(M_{\text {w}}\) while varying \(L_{\text {c}}\) is shown in Fig. 2.

Relaxed micromorphic model. (left) Extensional stiffness \(M_{\text {w}}\) while varying \(L_{\text {c}}\). The stiffness is bounded as \(L_{\text {c}} \rightarrow \infty \) (\(h\rightarrow 0\)). The values of the parameters used are: \(\mu = 1\), \(\lambda _{\text {e}}= 1\), \(M_{\text {e}}= 2\), \(\lambda _{\text {micro}}= 3\), \(M_{\text {micro}}= 4\), \(a_2= 1/5\); (right) Displacement profile across the thickness of the dimensionless \(\overline{u}_2=u_2/\left( \gamma \, h\right) \) for different values of \(L_{\text {c}}=\{0, 0.014, 0.0\overline{3}, 0.1\}\). The values of the other parameters used in order to maximize the nonhomogeneous behavior are \(\mu = 1\), \(\lambda _{\text {e}}=1\), \(M_{\text {e}}=1\), \(\lambda _{\text {micro}}=0.001\), \(M_{\text {micro}}= 0.056\), \(a_2=0.\overline{3}\)
The values of \(M_{\text {macro}}\) and \(M_{\text {micro}}\) are
where \(M_{i}=\kappa _{i} + \frac{4}{3}\mu _{i}\) and \(\lambda _{i}=\kappa _{i}-\frac{2}{3}\mu _{i}\) with \(i=\{\text {macro},\text {micro},\text {e}\}\).Footnote 3
It is highlighted that the structure \(\frac{(\bullet )_{\text {e}} \, (\bullet )_{\text {micro}}}{(\bullet )_{\text {e}} + (\bullet )_{\text {micro}}}\) is applicable to evaluate the macro coefficients only for the shear and bulk modulus because of the orthogonal energy decomposition “sym dev/tr” of which they are related, and especially here it would be a mistake to use this structure for the coefficient \(M_{\text {macro}}\) since it will give the value at the micro-scale. For more details about \(\lim \limits _{L_{\text {c}}\rightarrow \infty } M_{\text {w}}\) see Appendix A.
3.1 Uniaxial extension problem for the isotropic relaxed micromorphic model with \(\nu _e=\nu _{\text {micro}}=0\)
A vanishing Poisson’s ratio at the meso- and micro-scale (\(\nu _e=\nu _{\text {micro}}=0\)) corresponds to a vanishing first Lamé parameter (\(\lambda _{\text {e}}=\lambda _{\text {micro}}=0\)). It is easy to see from Eqs. (21) and (22) that these conditions correspond to
with \(M_{i}=\lambda _{i} + 2\mu _{i} = 2\mu _{i}\) with \(i=\{\text {micro},\text {e}\}\). Since the nonlinear terms in solution Eq. (22) vanish, we retrieve
which is a homogeneous elastic solution satisfying the equilibrium equation in the case of a constant micro-distortion tensor \(\overline{\varvec{P}}\) (see Appendix D of [27] for further details)
The strain energy associated with this solution is
where \(M_{\text {macro}} = 2\mu _{\text {macro}} + \lambda _{\text {macro}} = 2\mu _{\text {macro}} = \frac{2\mu _{\text {e}} \, \mu _{\text {micro}}}{\mu _{\text {e}}+\mu _{\text {micro}}}\) is the macro-extensional stiffness, since \(\lambda _{\text {macro}}=\nu _{\text {macro}}=0\).
4 Uniaxial extension problem for the isotropic micro-stretch model in dislocation format
In the micro-stretch model in dislocation format [5, 15, 20, 22, 30], the micro-distortion tensor \(\varvec{P}\) is devoid from the deviatoric component \(\text{ dev } \, \text{ sym } \, \varvec{P} = 0 \Leftrightarrow \varvec{P} = \varvec{A} + \omega {\mathbb {1}}\), \(\varvec{A} \in \mathfrak {so}(3)\), \(\omega \in \mathbb {R}\). The expression of the strain energy for this model in dislocation format can be written as [20]:
since \(\text{ Curl } \left( \omega {\mathbb {1}}\right) \in \mathfrak {so}(3)\). The equilibrium equations, in the absence of body forces, are then
According to the reference system shown in Fig. 1, the ansatz for the displacement and micro-distortion fields is
The boundary conditions at the free surface are then
Since the ansatz requires \(\varvec{A}=0\), the micro-stretch model coincides with the micro-void model which will be presented in Sect. 6.
5 Uniaxial extension problem for the isotropic Cosserat continuum
The strain energy for the isotropic Cosserat continuum in dislocation tensor format (curvature energy expressed in terms of \( \text {Curl} \varvec{A}\)) can be written as [3, 8, 13, 14, 18, 21, 25, 28, 29]
where \(\varvec{A} \in \mathfrak {so}(3)\). The equilibrium equations, in the absence of body forces, are therefore the following
According to the reference system shown in Fig. 1 and ansatz (14), which has to be particularized as \(\varvec{A} = \text {skew} \, \varvec{P} \in \mathfrak {so}(3)\), the ansatz for the displacement field and the micro-rotation for the Cosserat model is
Since \(\varvec{A}=\varvec{0}\), the Cosserat model is not able to catch any nonhomogeneous response for the uniaxial extension problem and classical solution (9) is retrieved.
The couple stress model [10, 11, 16, 19, 23], which appears by constraining \(\varvec{A}=\text {skew} \, \varvec{\text {D}u} \in \mathfrak {so}(3)\) in the Cosserat model, is also not able to catch a nonhomogeneous response for the uniaxial extension problem since, due to the ansatz, we would have \(\text {skew} \, \varvec{\text {D}u}=\varvec{0}\) as it can be seen in Eq. (40).
6 Uniaxial extension problem for the isotropic micro-void model in dislocation tensor format
The strain energy for the isotropic micro-void continuum in dislocation tensor format can be obtained from the relaxed micromorphic model by formally letting \(\mu _{\text {micro}}\rightarrow \infty \) (while keeping \(\kappa _{\text {micro}}\) finite) and can be written as [4, 28]
Here, \(\omega : \mathbb {R}^3 \rightarrow \mathbb {R}\) is the additional scalar micro-void degree of freedom [4]. The equilibrium equations, in the absence of body forces, are
and the positive definiteness conditions are
According to the reference system shown in Fig. 1, the ansatz for the displacement field and the function \(\omega (x_2)\) have to be
The boundary conditions for the uniaxial extension are
After substituting ansatz (44) into equilibrium equations (42) we obtain the following two differential equations
After applying boundary conditions Eq. (45), the solution in terms of \(u_2(x_2)\) and \(\omega (x_2)\) of system Eq. (46) is
where \(f_1>0\), \(z_1>0\), and \(z_2>0\) are strictly positive in order to match positive definiteness conditions Eq. (43), and the same reasoning applied in the relaxed micromorphic model sections still holds. The strain energy associated with this solution is
The plot of the extensional stiffness \(M_{\text {w}}\) while varying \(L_{\text {c}}\) is shown in Fig. 3.

Micro-void model. Extensional stiffness \(M_{\text {w}}\) while varying \(L_{\text {c}}\). The stiffness is bounded as \(L_{\text {c}} \rightarrow \infty \) (\(h\rightarrow 0\)) by \(M_{\text {e}}\). The values of the parameters used are: \(\mu = 1\), \(\lambda _{\text {e}}= 1\), \(M_{\text {e}}= 2\), \(\kappa _{\text {micro}}= 3\), \(a_2= 1/5\)
The values of the extensional stiffness \(M_{\text {w}}\) for \(L_{\text {c}}\rightarrow 0\) and \(L_{\text {c}}\rightarrow \infty \) are
where \(\mu _{\text {macro}}=\mu _{\text {e}}\) for \(\mu _{\text {micro}}\rightarrow \infty \), according to Eq. (29). We note that the extensional stiffness remains bounded as \(L_{\text {c}}\rightarrow \infty \) (\(h\rightarrow 0\)).
7 Uniaxial extension problem for the classical isotropic micromorphic continuum without mixed terms
The expression of the strain energy for the classical isotropic micromorphic continuum [7, 17] without mixed terms (like \(\langle \text {sym} \varvec{P}, \text {sym}\left( \text {D}\varvec{u} -\varvec{P}\right) \rangle \), etc.) and simplified curvature expression [25, 27] can be written as:
while the equilibrium equations without body forces are the following:
where (\(\mu _{\text {e}}\),\(\kappa _{\text {e}}=\lambda _{\text {e}}+2/3 \, \mu _{\text {e}}\)), (\(\mu _{\text {micro}}\),\(\kappa _{\text {micro}}=\lambda _{\text {micro}}+2/3 \, \mu _{\text {micro}}\)), \(\mu _{\text {c}}\), \(L_{\text {c}} > 0\), and (\(\widetilde{a}_1\),\(\widetilde{a}_2\),\(\widetilde{a}_3\))\( > 0\) in order to guarantee the positive definiteness of the energy. According to the reference system shown in Fig. 1, the ansatz for the displacement field and the classical micromorphic model is
The boundary conditions for the uniaxial extension are assumed to be
The calculations are deferred to micro-strain model Sect. 8 since the ansatz, the equilibrium equations, and the boundary conditions are the same; therefore, the solution will also be the same.
8 Uniaxial extension problem for the micro-strain model without mixed terms
The micro-strain model [9, 12, 31] is the classical Mindlin–Eringen [7, 17] model particular case in which it is assumed a priori that the micro-distortion remains symmetric, \(\varvec{P}=\varvec{S}\in \text {Sym}(3)\).
The strain energy which we consider is [25, 27]
The chosen 2-parameter curvature expression represents a simplified isotropic curvature (the full isotropic curvature for the micro-strain model would still count 8 parameters [2]).
The equilibrium equations, in the absence of body forces, are therefore the following
where (\(\mu _{\text {e}}\),\(\kappa _{\text {e}}=\lambda _{\text {e}}+2/3 \, \mu _{\text {e}}\)), (\(\mu _{\text {micro}}\),\(\kappa _{\text {micro}}=\lambda _{\text {micro}}+2/3 \, \mu _{\text {micro}}\)), \(L_{\text {c}} > 0\), and (\(\widetilde{a}_1\),\(\widetilde{a}_3\))\( > 0\) in order to guarantee the positive definiteness of the energy. The boundary conditions for the uniaxial extension are assumed to be
According to the reference system shown in Fig. 1, the ansatz for the displacement field and the micro-distortion is (which coincides with classical micromorphic model Eq. (52))
After substituting ansatz (57) into equilibrium equations (55) we obtain the following four differential equations
Being careful of substituting the system of differential equation with one in which Eq. (58)\(_2\) and Eq. (58)\(_4\) are replaced with their sum and their difference, respectively, we have
where \(f_{p} (x_2){:}{=}P_{11}(x_2)+P_{33}(x_2)\) and \(f_{m} (x_2){:}{=}P_{11}(x_2)-P_{33}(x_2)\). It is highlighted that Eq. (59)\(_4\) is a homogeneous second-order differential equation depending only on \(f_{m}(x_2)\) with homogeneous boundary conditions Eq. (56).
Also here, the fact that Eq. (59)\(_4\) is an independent equation has its meaning in the symmetry constraint of the uniaxial extensional problem in the direction along the \(x_2\)- and \(x_3\)-axis, which requires that \({P_{11}(x_2)=P_{33}(x_2)}\).
The solution and the measure of the apparent stiffness are too complicated to be reported here, but nevertheless, it is possible to plot how the apparent stiffness behaves while changing \(L_{\text {c}}\) (see Fig. 4).

Micro-strain model. (left) Extensional stiffness \(M_{\text {w}}\) while varying \(L_{\text {c}}\). The stiffness is bounded as \(L_{\text {c}} \rightarrow \infty \) (\(h\rightarrow 0\)) and converges to \(M_{\text {e}}\). The values of the parameters used are: \(\mu = 1\), \(\lambda _{\text {macro}}= 1\), \(M_{\text {macro}}= 3\), \(\lambda _{\text {micro}}= 9.69\), \(M_{\text {micro}}= 12\), \(\widetilde{a}_1= 1/5\), \(\widetilde{a}_3= 1/6\); (right) Displacement profile across the thickness of the dimensionless \(\overline{u}_2=u_2/\left( \gamma \, h\right) \) for different values of \(L_{\text {c}}=\{0, 3, 5, 10, \infty \}\). The values of the other parameters used in order to maximize the nonhomogeneous behavior are \(\mu = 1\), \(\lambda _{\text {e}}= 11\), \(M_{\text {e}}= 33\), \(\lambda _{\text {micro}}= 1.1\), \(M_{\text {micro}}= 3.3\), \(\widetilde{a}_1= 1\), \(\widetilde{a}_3= 1/6\)
We note that the extensional stiffness remains bounded as \(L_{\text {c}}\rightarrow \infty \) (\(h\rightarrow 0\)) and converges to \(M_{\text {e}}\). The solution obtained for the micro-strain model for the uniaxial extension problem also holds for the classical micromorphic problem presented in Sect. 7.
9 Uniaxial extension problem for the second gradient continuum

Second gradient model. (left) Extensional stiffness \(M_{\text {w}}\) while varying \(L_{\text {c}}\). For the second gradient model (solid curve) the stiffness is unbounded as \(L_{\text {c}} \rightarrow \infty \) (\(h\rightarrow 0\)), while for the micro-strain model (dashed curve) the stiffness is bounded. The second gradient model can be obtained from the micro-strain model by formally letting \(\mu _{\text {e}},\lambda _{\text {e}}\rightarrow \infty \). The values of the parameters used are: \(\mu = 1\), \(\mu _{\text {macro}}= 1\), \(\lambda _{\text {macro}}= 2\), \(\widetilde{a}_3= 4\); (right) Displacement profile across the thickness of the dimensionless \(\overline{u}_2=u_2/\left( \gamma \, h\right) \) for different values of \(L_{\text {c}}=\{0, 0.1, 0.2, 0.35, \infty \}\). The values of the other parameters used in order to maximize the nonhomogeneous behavior are \(\mu = 1\), \(\lambda _{\text {micro}}=1\), \(M_{\text {micro}}= 1\), \(\widetilde{a}_3=2\)
The strain energy density for the isotropic second gradient with simplified curvature [1, 6, 17, 25, 27] is
while the equilibrium equations without body forces are the following:
where \((\mu _{\text {macro}},\kappa _{\text {macro}},\mu ,\widetilde{a}_1,\widetilde{a}_3)>0\) in order to guarantee the positive definiteness of the energy. Due to the uniaxial extension problem symmetry the following structure of \(\varvec{u} = \left( 0,u_{2}(x_{2}), 0\right) ^T\) has been chosen, which results in having only the component \(u_{2,2}\) different from zero in the gradient of the displacement \(\text {D}\varvec{u}\). The boundary conditions for the uniaxial extension are (see Fig. 1) assumed to be
After substituting the expression of the displacement field in Eq. (61), the nontrivial equilibrium equation reduces to
After applying the boundary conditions to the solution of Eq. (63), it results that \(u_{2}(x_2)\) is given by [24, 26]
where \(f_1>0\) is strictly positive in order to match the positive definiteness conditions and the same reasoning applied in the relaxed micromorphic model sections still holds. Strain energy (61) becomes then
The plot of the extensional stiffness \(M_{\text {w}}\) while varying \(L_{\text {c}}\) is shown in Fig. 5.
10 Conclusions
Only the second gradient formulation produces an unbounded apparent stiffness as \(L_{\text {c}}\rightarrow \infty \) (\(h\rightarrow 0\)), while for the other models different bounded limit stiffnesses are observed. For the second gradient model, because of its unboundedness stiffness, it can be more likely to have an instability in the parameters’ fitting process on real structures: while being at a scale close to the singularity, a small changes in the geometrical or material properties of the sample may technically cause an arbitrarily large change in the values of the elastic coefficients. Therefore, the use of the second gradient model (or the classical micromorphic model in bending or torsional tests [25, 27]) should be done with great care as regards the stable identification of parameters. These problems are avoided for the relaxed micromorphic model. The relaxed micromorphic model determines \(\overline{M} = \frac{M_{\text {e}} \, M_{\text {micro}}}{M_{\text {e}} + M_{\text {micro}}}\), which is less than \(M_{\text {micro}}\) and \(M_{\text {e}}\), while the micro-strain model determines \(M_{\text {e}}\) as limit stiffness. The Cosserat model is not able to catch a nonhomogeneous solution and provides no size effect. The different limit stiffnesses for the relaxed micromorphic model versus the full micromorphic and micro-strain model approach, respectively, suggest that the meaning of classical experimental tests does not have an unambiguous deformation and micro-deformation solution field anymore, and this is due to the fact that we can have different boundary conditions on the components of the micro-distortion tensor depending on what each model requires to constrain. This allows the existence of different uniaxial extension-like problems and not just one like for a classical Cauchy material.
Notes
Note that the model has a unique solution including the case of a Cosserat couple modulus \(\mu _{\text {c}}=0\).
\(\text {sech}(x) = 1/cosh(x)\).
For the sake of completeness are reported here also the relations between the Young’s modulus \(E_{i}\) and the Poisson’s ratio \(\nu _{i}\) in terms of \(\kappa _{i}\) and \(\mu _{i}\): \(E_{i}=\frac{9\kappa _{i}\,\mu _{i}}{3\kappa _{i}+\mu _{i}}\) and \(\nu _{i}=\frac{3\kappa _{i}-2\mu _{i}}{2(3\kappa _{i}+\mu _{i})}\) with \(i=\{\text {macro},\text {micro},\text {e}\}\).
References
Altenbach, H., Müller, W.H., Abali, B.E.: Higher Gradient Materials and Related Generalized Continua. Springer, Berlin (2019)
Barbagallo, G., Madeo, A., d’Agostino, M., Abreu, R., Ghiba, I., Neff, P.: Transparent anisotropy for the relaxed micromorphic model: macroscopic consistency conditions and long wave length asymptotics. Int. J. Solids Struct. 120, 7–30 (2017)
Cosserat, E., Cosserat, F.: Théorie des corps déformables. A. Hermann et fils (reprint 2009), Paris (1909)
Cowin, S., Nunziato, J.: Linear elastic materials with voids. J. Elast. 13(2), 125–147 (1983)
De Cicco, S., Nappa, L.: Torsion and flexure of microstretch elastic circular cylinders. Int. J. Eng. Sci. 35(6), 573–583 (1997)
Dell’Isola, F., Sciarra, G., Vidoli, S.: Generalized Hooke’s law for isotropic second gradient materials. Proc. R. Soc. A Math. Phys. Eng. Sci. 465(2107), 2177–2196 (2009)
Eringen, A.C.: Mechanics of micromorphic continua. Mechanics of generalized continua, pp. 18–35. Springer, Berlin (1968)
Fantuzzi, N., Leonetti, L., Trovalusci, P., Tornabene, F.: Some novel numerical applications of Cosserat continua. Int. J. Comput. Methods 15(06), 1850054 (2018)
Forest, S., Sievert, R.: Nonlinear microstrain theories. Int. J. Solids Struct. 43(24), 7224–7245 (2006)
Ghiba, I., Neff, P., Madeo, A., Münch, I.: A variant of the linear isotropic indeterminate couple-stress model with symmetric local force-stress, symmetric nonlocal force-stress, symmetric couple-stresses and orthogonal boundary conditions. Math. Mech. Solids 22(6), 1221–1266 (2017)
Hadjesfandiari, A., Dargush, G.: Comparison of theoretical elastic couple stress predictions with physical experiments for pure torsion (2016). arXiv:1605.02556
Hütter, G., Mühlich, U., Kuna, M.: Micromorphic homogenization of a porous medium: elastic behavior and quasibrittle damage. Contin. Mech. Thermodyn. 27(6), 1059–1072 (2015)
Izadi, R., Tuna, M., Trovalusci, P., Ghavanloo, E.: Torsional characteristics of carbon nanotubes: micropolar elasticity models and molecular dynamics simulation. Nanomaterials. 11(2), 453 (2021)
Jeong, J., Ramézani, H., Münch, I., Neff, P.: A numerical study for linear isotropic Cosserat elasticity with conformally invariant curvature. Z. Angew. Math. Mech. 89(7), 552–569 (2009)
Kirchner, N., Steinmann, P.: Mechanics of extended continua: modeling and simulation of elastic microstretch materials. Comput. Mech. 40(4), 651–666 (2007)
Koiter, W.: Couple stresses in the theory of elasticity: I and II. Proc. Kon. Ned. Akad. Wetensch. Ser. B 67, 17–44 (1964)
Mindlin, R.: Micro-structure in linear elasticity. Arch. Ration. Mech. Anal. 16(1), 51–78 (1964)
Neff, P.: The Cosserat couple modulus for continuous solids is zero viz the linearized Cauchy-stress tensor is symmetric. Z. Angew. Math. Mech. 86(11), 892–912 (2006)
Neff, P., Ghiba, I., Madeo, A., Münch, I.: Correct traction boundary conditions in the indeterminate couple stress model (2015). arXiv:1504.00448
Neff, P., Ghiba, I., Madeo, A., Placidi, L., Rosi, G.: A unifying perspective: the relaxed linear micromorphic continuum. Continu. Mech. Thermodyn. 26(5), 639–681 (2014)
Neff, P., Jeong, J.: A new paradigm: the linear isotropic Cosserat model with conformally invariant curvature energy. Z. Angew. Math. Mech. 89(2), 107–122 (2009)
Neff, P., Jeong, J., Münch, I., Ramezani, H.: Mean field modeling of isotropic random Cauchy elasticity versus microstretch elasticity. Z. Angew. Math. Phys. 60(3), 479–497 (2009)
Neff, P., Münch, I., Ghiba, I., Madeo, A.: On some fundamental misunderstandings in the indeterminate couple stress model. A comment on recent papers of AR Hadjesfandiari and GF Dargush. Int. J. Solids Struct. 81, 233–243 (2016)
Rizzi, G., Dal Corso, F., Veber, D., Bigoni, D.: Identification of second-gradient elastic materials from planar hexagonal lattices. Part II: mechanical characteristics and model validation. Int. J. Solids Struct. 176, 19–35 (2019)
Rizzi, G., Hütter, G., Madeo, A., Neff, P.: Analytical solutions of the cylindrical bending problem for the relaxed micromorphic continuum and other generalized continua. Contin. Mech. Thermodyn. 1–35 (2021). arXiv:2012.10391
Rizzi, G., Dal Corso, F., Veber, D., Bigoni, D.: Identification of second-gradient elastic materials from planar hexagonal lattices. Part I: analytical derivation of equivalent constitutive tensors. Int. J. Solids Struct. 176, 1–18 (2019)
Rizzi, G., Hütter, G., Khan, H., Ghiba, I. D., Madeo, A., Neff, P.: Analytical solution of the cylindrical torsion problem for the relaxed micromorphic continuum and other generalized continua (including full derivations). Math. Mech. Solids (2021) (to appear). arXiv:2104.11322
Rizzi, G., Hütter, G., Madeo, A., Neff, P.: Analytical solutions of the simple shear problem for micromorphic models and other generalized continua. Arch. Appl. Mech. 91(5), 2237–2254 (2021)
Rueger, Z., Lakes, R.: Strong Cosserat elasticity in a transversely isotropic polymer lattice. Phys. Rev. Lett. 120(6), 065501 (2018)
Scalia, A.: Extension, bending and torsion of anisotropic microstretch elastic cylinders. Math. Mech. Solids 5(1), 31–40 (2000)
Shaat, M.: A reduced micromorphic model for multiscale materials and its applications in wave propagation. Compos. Struct. 201, 446–454 (2018)
Shaat, M., Ghavanloo, E., Fazelzadeh, S.A.: Review on nonlocal continuum mechanics: physics, material applicability, and mathematics. Mech. Mater. 150, 103587 (2020)
Shekarchizadeh, N., Abali, B.E., Barchiesi, E., Bersani. A.M.: Inverse analysis of metamaterials and parameter determination by means of an automatized optimization problem. Zeitschrift für Angewandte Mathematik und Mechanik (2021)
Triawan, F., Kishimoto, K., Adachi, T., Inaba, K., Nakamura, T., Hashimura, T.: The elastic behavior of aluminum alloy foam under uniaxial loading and bending conditions. Acta Mater. 60(6–7), 3084–3093 (2012)
Yao, H., Yun, G., Bai, N., Li, J.: Surface elasticity effect on the size-dependent elastic property of nanowires. J. Appl. Phys. 111(8), 083506 (2012)
Zhao, H., Min, K., Aluru, N.R.: Size and chirality dependent elastic properties of graphene nanoribbons under uniaxial tension. Nano Lett. 9(8), 3012–3015 (2009)
Acknowledgements
Angela Madeo and Gianluca Rizzi acknowledge the support from the European Commission through the funding of the ERC Consolidator Grant META-LEGO, N\(^{\circ }\) 101001759. Angela Madeo and Gianluca Rizzi acknowledge funding from the French Research Agency ANR, “METASMART” (ANR-17CE08-0006). Hassam Khan acknowledges the support of the German Academic Exchange Service (DAAD) and the Higher Education Commission of Pakistan (HEC). Ionel Dumitrel Ghiba acknowledges the support from a grant of the Romanian Ministry of Research and Innovation, CNCS-UEFISCDI, project number PN-III-PN-III-P1-1.1-TE-2021-0783, within PNCDI III. Patrizio Neff acknowledges the support in the framework of the DFG-Priority Programme 2256 “Variational Methods for Predicting Complex Phenomena in Engineering Structures and Materials”, Neff 902/10-1, Project No. 440935806.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The limit \(L_{\text {c}} \rightarrow \infty \) for the relaxed micromorphic model
The limit \(L_{\text {c}} \rightarrow \infty \) for the relaxed micromorphic model
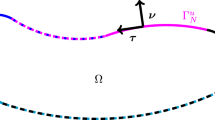
The limit of the energy, Eq. (11), for \(L_{\text {c}} \rightarrow \infty \), requires that \( \left\Vert \text {Curl}\,\varvec{P} \right\Vert = 0\), which implies that \(\varvec{P} = \text {D} \varvec{\zeta }\), for some \(\zeta : \Omega \rightarrow \mathbb {R}^3\). Energy Eq. (11) now becomes
and that Eq. (13) turns into
with consistent coupling boundary condition \(\text {D}\,\varvec{u} \cdot \varvec{\tau } = \text {D} \varvec{\zeta } \cdot \varvec{\tau }\). Given Eq. (66)\(_1\), Eq. (66)\(_2\) reduces to be
which, for the uniaxial extension problem with boundary condition \(u_{2} \left( x_2 = \pm h/2 \right) = \pm \varvec{\gamma } \, h/2\), is equivalent to
where a is an arbitrary constant. This solution to Eq. (66) is therefore not unique. Inserting \(\text {D} \varvec{u}\) and \(\text {D} \varvec{\zeta }\) from Eq. (68) in Eq. (65), the following energy expression is recovered
which has to be minimized with respect to a in order to remove the nonuniqueness of equilibrium system Eq. (66), which means that the following relation
has to be satisfied. The solution of Eq. (70) is \(a_{\text {min}} = \dfrac{M_{\text {e}}}{M_{\text {e}} + M_{\text {micro}}} \varvec{\gamma }\). Finally it is possible to substitute \(a_{\text {min}}\) into Eq. (68) obtaining
Solution Eq. (71) satisfies the equilibrium equations, the boundary conditions, and the minimum energy requirement. The expression of the energy now becomes
with \(\overline{M}=\dfrac{M_{\text {e}} \, M_{\text {micro}}}{M_{\text {e}} + M_{\text {micro}}}\) the extensional stiffness for the relaxed micromorphic when \(L_{\text {c}} \rightarrow \infty \).
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Rizzi, G., Khan, H., Ghiba, ID. et al. Analytical solution of the uniaxial extension problem for the relaxed micromorphic continuum and other generalized continua (including full derivations). Arch Appl Mech 93, 5–21 (2023). https://doi.org/10.1007/s00419-021-02064-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-021-02064-3