
Abstract
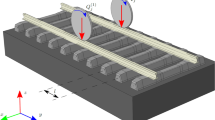
Employing a 3D model of the vehicle–track interaction, dynamic responses of sleepers in railway tracks are determined due to the effect of uneven irregularities (cross-levels) in left/right rails. An integrated mathematical model of the vehicle–track system is used to calculate the dynamic behavior of sleepers in the railway track. The general methodology of the dynamic analysis is presented by extracting the mathematical equations and by introducing the coupling process in the wheel–rail interface. Besides the vertical (bounce) and pitch motions, roll degrees of freedom of the components are taken into account. Except rails and sleepers, other components of the vehicle–track system are simulated with the rigid-body elements, linked to each other within the resilient elements (springs and dashpots). The rails and sleepers are modeled with the beam elements, making the model more detailed in the track subsystem. A numerical integration algorithm based on Newmark’s method is developed, capable of solving the dynamic interaction of the entire system in time domain. Applying various irregularity profiles from the field measurement data as the source of excitation, the dynamic response of sleepers in track structure is treated in the longitudinal and traverse directions. Dynamic displacements under sleepers are compared with the analytical solution of the beam on elastic foundation (static response) to highlight the dynamic amplifications. The results of analysis show that the profile unevenness in left/right rails plays an important role in dynamic stability of the sleepers in railway track, particularly when the severity of the profile unevenness was increased.














Similar content being viewed by others

References
Berg, M.: A non-linear rubber spring model for rail vehicle dynamics analysis. Veh. Syst. Dyn. 30(3–4), 197–212 (1998)
Law, E.H., Cooperrider, N.K.: A survey of railway vehicle dynamics research. J. Dyn. Syst. Meas. Control 96(2), 132–146 (1974)
Shabana, A.A., Sany, J.R.: A survey of rail vehicle track simulations and flexible multibody dynamics. Nonlinear Dyn. 26(2), 179–212 (2001)
Naeimi, M., Zakeri, J.A., Shadfar, M., Esmaeili, M.: 3D dynamic model of the railway wagon to obtain the wheel–rail forces under track irregularities. Proc. Inst. Mech. Eng. K: J. Multi-Body Dyn. (2015). doi:10.1177/1464419314566833
Ahlbeck, D., Meacham, H., Prause, R.: The development of analytical models for railroad track dynamics. In: Symposium on Railroad Track Mechanics. Princeton University, Pergamon Press (1975)
Baeza, L., Ouyang, H.: A railway track dynamics model based on modal substructuring and a cyclic boundary condition. J. Sound Vib. 330(1), 75–86 (2011)
Grassie, S., Cox, S.: The dynamic response of railway track with flexible sleepers to high frequency vertical excitation. Proc. Inst. Mech. Eng. D: J. Automob. Eng. 198(2), 117–124 (1984)
Cai, Z., Raymond, G.: Modelling the dynamic response of railway track to wheel/rail impact loading. Struct. Eng. Mech. 2(1), 95–112 (1994)
Newton, S., Clark, R.: An investigation into the dynamic effects on the track of wheelflats on railway vehicles. J. Mech. Eng. Sci. 21(4), 287–297 (1979)
Knothe, K., Wu, Y.: Receptance behaviour of railway track and subgrade. Arch. Appl. Mech. 68(7–8), 457–470 (1998)
Meacham, H., Ahlbeck, D.: A computer study of dynamic loads caused by vehicle–track interaction. J. Eng. Ind. 91(3), 808–816 (1969)
Diana, G., Cheli, F., Bruni, S., Collina, A.: Dynamic interaction between rail vehicles and track for high speed train. Veh. Syst. Dyn. 24(sup1), 15–30 (1995)
Ripke, B., Knothe, K.: Simulation of high frequency vehicle–track interactions. Veh. Syst. Dyn. 24(sup1), 72–85 (1995)
Grassie, S.L.: Models of railway track and vehicle/track interaction at high frequencies: results of benchmark test. Veh. Syst. Dyn. 25(S1), 243–262 (1996)
Fröhling, R.D.: Low frequency dynamic vehicle/track interaction: modelling and simulation. Veh. Syst. Dyn. 29(S1), 30–46 (1998)
Nielsen, J.C., Lundén, R., Johansson, A., Vernersson, T.: Train–track interaction and mechanisms of irregular wear on wheel and rail surfaces. Veh. Syst. Dyn. 40(1–3), 3–54 (2003)
Knothe, K., Grassie, S.: Modelling of railway track and vehicle/track interaction at high frequencies. Veh. Syst. Dyn. 22(3–4), 209–262 (1993)
Zhai, W., Cai, C., Guo, S.: Coupling model of vertical and lateral vehicle/track interactions. Veh. Syst. Dyn. 26(1), 61–79 (1996)
Zhai, W., Cai, Z.: Dynamic interaction between a lumped mass vehicle and a discretely supported continuous rail track. Comput. Struct. 63(5), 987–997 (1997)
Zhai, W., Sun, X.: A detailed model for investigating vertical interaction between railway vehicle and track. Veh. Syst. Dyn. 23(S1), 603–615 (1994)
Sun, Y.Q., Dhanasekar, M.: A dynamic model for the vertical interaction of the rail track and wagon system. Int. J. Solids Struct. 39(5), 1337–1359 (2002)
Zhai, W., Wang, Q., Lu, Z., Wu, X.: Dynamic effects of vehicles on tracks in the case of raising train speeds. Proc. Inst. Mech. Eng. F: J. Rail Rapid Transit 215(2), 125–135 (2001)
Zakeri, J.A., Xia, H.: Sensitivity analysis of track parameters on train–track dynamic interaction. J. Mech. Sci. Technol. 22(7), 1299–1304 (2008)
Galvín, P., Romero, A., Domínguez, J.: Fully three-dimensional analysis of high-speed train–track–soil-structure dynamic interaction. J. Sound Vib. 329(24), 5147–5163 (2010)
Kumaran, G., Menon, D., Krishnannair, K.: Dynamic studies of railtrack sleepers in a track structure system. J. Sound Vib. 268(3), 485–501 (2003)
Popp, K., Kaiser, I., Kruse, H.: System dynamics of railway vehicles and track. Arch. Appl. Mech. 72(11–12), 949–961 (2003)
Johansson, A., Nielsen, J.C.O.: Rail corrugation growth—influence of powered wheelsets with wheel tread irregularities. Wear 262(11–12), 1296–1307 (2007)
Jin, X., Wen, Z., Wang, K.: Effect of track irregularities on initiation and evolution of rail corrugation. J. Sound Vib. 285(1), 121–148 (2005)
Grassie, S., Kalousek, J.: Rail corrugation: characteristics, causes and treatments. Proc. Inst. Mech. Eng. F: J. Rail Rapid Transit 207(1), 57–68 (1993)
Karttunen, K., Kabo, E., Ekberg, A.: The influence of track geometry irregularities on rolling contact fatigue. Wear 314(1–2), 78–86 (2014)
Naeimi, M., Zakeri, J.A., Esmaeili, M., & Shadfar, M.: Influence of uneven rail irregularities on the dynamic response of railway track using a three dimensional model of the vehicle–track system. Veh. Syst. Dyn. (2015). doi:10.1080/00423114.2014.998243
Hou, K., Kalousek, J., Dong, R.: A dynamic model for an asymmetrical vehicle/track system. J. Sound Vib. 267(3), 591–604 (2003)
Jin, X.S., Wen, Z.F., Wang, K.Y., et al.: Three-dimensional train–track model for study of rail corrugation. J. Sound Vib. 293(3–5), 830–855 (2006)
Xu, Y.L., Ding, Q.S.: Interaction of railway vehicles with track in cross-winds. J. Fluids Struct. 22(3), 295–314 (2006)
Zakeri, J.A., Xia, H., Fan, J.J.: Dynamic responses of train–track system to single rail irregularity. Latin Am. J. Solids Struct. 6(2), 89–104 (2009)
Naeimi, M.: Dynamic response of sleepers in railway track, in Department of Railway Engineering. Master thesis. Iran University of Science and Technology, Tehran, Iran (2010)
Dinh, V.N., Kim, K.D., Warnitchai, P.: Dynamic analysis of three-dimensional bridge-high-speed train interactions using a wheel–rail contact model. Eng. Struct. 31(12), 3090–3106 (2009)
Chopra, A.K.: Dynamics of Structures: Theory and Applications to Earthquake Engineering, vol. 3. Prentice Hall, Englewood Cliffs, NJ (1995)
Kalker, J.J.: Survey of wheel–rail rolling-contact theory. Veh. Syst. Dyn. 8(4), 317–358 (1979)
Yang, B.: Dynamics and control of Euler–Bernoulli beams. In: Yang, B. (ed.) Stress, Strain, and Structural Dynamics, pp. 521–615. Academic Press, Burlington (2005)
Ames, W.F., Ames, W.: Nonlinear Partial Differential Equations in Engineering, vol. 2. Academic Press, New York (1972)
Morton, K., Mayers, D.: Numerical Solution of Partial Differential Equations: An Introduction, 2nd edn. Cambridge University Press, Cambridge (2005)
Zienkiewicz, O.C., Taylor, R.L.: The Finite Element Method: Solid Mechanics, vol. 2. Butterworth-Heinemann, Oxford, MA (2000)
Mohammadzadeh, S., Ahadi, S., Keshavarzian, H.: Assessment of fracture reliability analysis of crack growth in spring clip type Vossloh SKL14. Proc. Inst. Mech. Eng. O: J. Risk Reliab. (2014). doi:10.1177/1748006X14527926
Metrikine, A., Popp, K.: Steady-state vibrations of an elastic beam on a visco-elastic layer under moving load. Arch. Appl. Mech. 70(6), 399–408 (2000)
Zhai, W.M., Wang, K.Y., Lin, J.H.: Modelling and experiment of railway ballast vibrations. J. Sound Vib. 270(4–5), 673–683 (2004)
Zhang, S., Xiao, X., Wen, Z., Jin, X.: Effect of unsupported sleepers on wheel/rail normal load. Soil Dyn. Earthq. Eng. 28(8), 662–673 (2008)
Acknowledgments
This paper is the part of the M.S. Thesis of the first author. Our gratitude is given to Iranian Railway Research Centre for providing accessibility to particular samples of rail profile measurement data in Iranian Railway Network. This research was undertaken in the School of Railway Engineering, Iran University of Science and Technology (IUST).
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Equations of the vehicle [31, 37]
Vertical motion of the car-body:
Pitching motion of the car-body:
Rolling motion of the car-body:
Vertical motion of the jth bogie:
Pitching motion of the jth bogie:
Rolling motion of the jth bogie:
Vertical motion of the kth wheelset:
Rolling motion of the kth wheelset:
Matrix-form equation of the entire vehicle:
Displacement vector of the car-body:
Mass matrix of the vehicle:
Stiffness matrix of the vehicle:
External dynamic force vector of the vehicle:
Effective force vectors in the integration problem of this study:
Appendix 2: Equations of the track [31, 47]
Vertical/bending motion of the rail beam:
Torsional motion (rolling) of the rail beam:
Rail beam shape functions for deflection, bending and torsion (20 mode functions were superposed):
Vertical/bending motion of the sleeper beam (z is the major axis of the sleeper):
Sleeper beam shape functions for deflection, bending and torsion (20 mode functions were superposed):
Dynamic equilibrium of the ith ballast block in vertical motion:
Mass matrix of the rail and sleeper elements:
Stiffness matrix of the rail and sleeper elements:
Damping matrix of the jth rail and sleeper beams, Rayleigh damping
Mass matrices of the entire ballast elements (The entire ballast mass divided to five separate blocks) (Table 4):
Manipulating configurations of the track matrices:
Equation of motion of the entire track:
Rights and permissions
About this article

Cite this article
Naeimi, M., Zakeri, J.A., Esmaeili, M. et al. Dynamic response of sleepers in a track with uneven rail irregularities using a 3D vehicle–track model with sleeper beams. Arch Appl Mech 85, 1679–1699 (2015). https://doi.org/10.1007/s00419-015-1012-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-015-1012-9