
Abstract
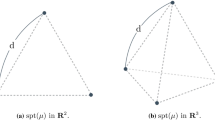
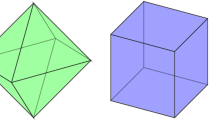
We consider functionals measuring the dispersion of a d-dimensional distribution which are based on the volumes of simplices of dimension \(k\le d\) formed by \(k+1\) independent copies and raised to some power \(\delta \). We study properties of extremal measures that maximize these functionals. In particular, for positive \(\delta \) we characterize their support and for negative \(\delta \) we establish connection with potential theory and motivate the application to space-filling design for computer experiments. Several illustrative examples are presented.




Similar content being viewed by others

References
Audze P, Eglais V (1977) New approach for planning out of experiments. Probl Dyn Strengths 35:104–107
Björck G (1956) Distributions of positive mass, which maximize a certain generalized energy integral. Arkiv för Matematik 3(21):255–269
Fedorov VV (1972) Theory of optimal experiments. Academic Press, New York
Hardin DP, Saff EB (2004) Discretizing manifolds via minimum energy points. Notices AMS 51(10):1186–1194
Johnson ME, Moore LM, Ylvisaker D (1990) Minimax and maximin distance designs. J Stat Plan Inference 26:131–148
Landkof NS (1972) Foundations of modern potential theory. Springer, Berlin
McKay MD, Beckman RJ, Conover WJ (1979) A comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics 21(2):239–245
Morris MD, Mitchell TJ (1995) Exploratory designs for computational experiments. J Stat Plan Inference 43:381–402
Pronzato L, Müller WG (2012) Design of computer experiments: space filling and beyond. Stat Comput 22:681–701
Pronzato L, Pázman A (2013) Design of experiments in nonlinear models. Asymptotic normality, optimality criteria and small-sample properties. LNS 212, Springer, New York
Pronzato L, Wynn HP, Zhigljavsky A (2016) Extended generalised variances, with applications. Bernoulli (to appear). arXiv preprint arXiv:1411.6428
Saff EB (2010) Logarithmic potential theory with applications to approximation theory. Surv Approx Theory 5(14):165–200
Schilling RL, Song R, Vondracek Z (2012) Bernstein functions: theory and applications. de Gruyter, Berlin/Boston
Zhigljavsky AA, Dette H, Pepelyshev A (2010) A new approach to optimal design for linear models with correlated observations. J Am Stat Assoc 105(491):1093–1103
Acknowledgments
The work of the first author was partly supported by the ANR project 2011-IS01-001-01 DESIRE (DESIgns for spatial Random fiElds). The third author was supported by the Russian Science Foundation, project Nb. 15-11-30022 “Global optimization, supercomputing computations, and application”.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
Lemma 2
Consider matrix A given by (2). The Laplacian of \(\det ^{\alpha }(A)\) considered as a function of \(x_1\) is
where \({\mathbf 1}_k=(1,\ldots ,1)^\top \in \mathbb {R}^k\).
Proof
We have
where \({\partial A{/}{\partial } \{x_1\}_i = -[{{\mathbf 1}_k \Delta _i^\top +\Delta _i{\mathbf 1}_k^\top }]}\) and \({\partial ^2 A{/}{\partial } \{x_1\}_i^2 =2 {\mathbf 1}_k{\mathbf 1}_k^\top }\), with \(\Delta _i=(\{x_2-x_1\}_i,\ldots ,\{x_{k+1}-x_1\}_i)^\top \in \mathbb {R}^k\). This gives
Noting that \(\sum _{i=1}^d \Delta _i \Delta _i^\top =A\), we have \(\sum _{i=1}^d \Delta _i^\top A^{-1}\Delta _i=\text{ trace }(I_k)=k\) and obtain
and
Now,
which finally gives (11). \(\square \)
A subgradient-type algorithm to maximize \({\widehat{\mathscr {D}}}_{k,-\infty }(\cdot )\).
Consider a design \(X_n=(x_1,\ldots ,x_n)\), with each \(x_i\in {\mathscr {X}}\), a convex subset of \(\mathbb {R}^d\), as a vector in \(\mathbb {R}^{n\times d}\). The function \({\widehat{\mathscr {D}}}_{k,-\infty }(\cdot )\) defined in (10) is not concave (due to the presence of \(\min \)), but is Lipschitz and thus differentiable almost everywhere. At points \(X_n\) where it fails to be differentiable, we consider any particular gradient from the subdifferential,
where \(x_{j_1},\ldots ,x_{j_{k+1}}\) are such that \({\mathscr {V}}_k(x_{j_1},\ldots ,x_{j_{k+1}})={\widehat{\mathscr {D}}}_{k,-\infty }(X_n)\) and where \(\nabla v_{j_1,\ldots ,j_{k+1}}(X_n)\) denotes the usual gradient of the function \({\mathscr {V}}_k(x_{j_1},\ldots ,x_{j_{k+1}})\). Our subgradient-type algorithm then corresponds to the following sequence of iterations, where the current design \(X_n^{(t)}\) is updated into
where \(P_{\mathscr {X}}[\cdot ]\) denotes the orthogonal projection on \({\mathscr {X}}\) and \(\gamma _t>0\), \(\gamma _t \searrow 0\), \(\sum _t \gamma _t=\infty \), \(\sum _t \gamma _t^2 < \infty \).
Direct calculation gives
where
so that
for \(j\in \{j_1,\ldots ,j_{k+1}\}\), \(j\ne j_1\), and
Rights and permissions
About this article

Cite this article
Pronzato, L., Wynn, H.P. & Zhigljavsky, A. Extremal measures maximizing functionals based on simplicial volumes. Stat Papers 57, 1059–1075 (2016). https://doi.org/10.1007/s00362-016-0767-6
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00362-016-0767-6