
Abstract
Electric motors with high-power densities are required for the implementation of electromobility. To achieve this, direct liquid cooling methods are increasingly being considered, in which oil is injected into the motor compartment. This results in a two-phase flow that can be used for efficient cooling. However, the oil, which can also penetrate the air gap between the rotor and stator, can also lead to additional losses due to increased friction. Since little is known about the two-phase flow in such systems, especially in the air gap, it is investigated by means of simple optical visualizations and high-speed laser-induced fluorescence imaging as well as torque measurements. The measurements are carried out in the air gap of an optically accessible generic model of a directly cooled electric motor. Speed variations were performed from 100 to 2000 rpm, and three different two-phase flow regimes were observed. At low speeds (Flow Regime 1), the air gap is filled locally with oil in radial direction, in the medium speed range (Flow Regime 2) with foam, while at high speeds (Flow Regime 3) separated films were observed on the rotor and stator. The torque difference between the two-phase and single-phase operation, which quantifies the mechanical losses due to the injected oil, increased continuously due to the oil in the air gap until it reached a maximum in Flow Regime 2 due to foam formation. In Flow Regime 3, the torque difference was negative. This was attributed to the fact that the grooves in the stator were filled with oil, thus reducing the turbulence generation of the air flow.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In the European Union, the implementation of electromobility is being pursued as an important building block in the decarbonization of the mobility sector in order to make Europe the first climate-neutral continent by 2050 (European Commission 2021). Therefore, the CO2 emission reduction targets for newly registered passenger cars and light commercial vehicles have been successively tightened (European Parliament and Council 2023). Battery electric vehicles are explicitly considered as zero-emission vehicles in this regulation.
There are different types of electric motors for vehicle propulsion, which can be classified by operating characteristics, electric power source, or motion type, just to name a few. For cost and performance reasons, three-phase alternating current motors are mainly used in industry as either synchronous or asynchronous machines (Tong 2022). Synchronous machines are the most common type of electric motors (Doppelbauer 2020). Due to their high-power density, the high efficiency, and the good controllability, brushless permanent magnet synchronous machines are widely used in the automotive industry (Carriero et al. 2018; Doppelbauer 2020). When motor size is a design criterion, the use of motors with rare earth permanent magnets is suitable because they exhibit the highest power density (Tong 2022). Such motors consist of a permanent magnet rotor and a current-carrying stator separated by an air gap. A cylindrical motor shape is used for radial flux machines, while axial flux machines typically consist of disks (Tong 2022). This paper focuses on radial flux machines with the typical arrangement of the rotor with permanent magnets placed coaxially inside the stator.
Power losses in electric motors are largely converted into thermal energy, resulting in the heating of motor components (Tong 2022). The major power losses in electric motors are iron losses and copper losses (Nam 2019; Tong 2022). Iron losses occur in magnetic materials in an alternating field and stem from eddy currents and the hysteresis of the material, while cooper losses arise in the stator windings and typically exceed the iron losses (Nam 2019; Tong 2022). Other losses are mainly rotational speed-dependent friction losses for example due to windage and stray losses caused by the winding space and slot harmonics (Nam 2019). The magnitude of the losses depends on the supply voltage and the speed (Nam 2019). Beck states that the losses in the windings dominate at low speeds and those in the rotor increase with speed (Beck 2020). A large current is required to generate high torques, resulting in high copper losses in the stator, while iron losses increase with speed due to the alternating magnetic field (Wang et al. 2022). The winding and stack insulation as well as the permanent magnets impose a temperature limit on the electric motor (Bauer 2019; Beck 2020; Doppelbauer 2020; Nam 2019; Tong 2022). Cooling is therefore required to avoid shortening the lifetime of the electric motor (Bauer 2019; Doppelbauer 2020; Tong 2022).
There are several cooling techniques for electric motors, each with specific goals, advantages, and disadvantages. A variety of cooling techniques is described by Gronwald and Kern (2021) and Carriero et al. (2018). A suitable cooling system, which may be a combination of different cooling techniques, must set the cooling capacity in relation to negative effects like additional friction losses (Carriero et al. 2018). Cooling techniques can be classified according to their system architecture in open or closed systems, by the heat transfer mechanism used, and the heat transfer medium (Carriero et al. 2018). Direct liquid cooling of the rotor and stator windings is coming into focus as the power density of electric motors increases (Gronwald and Kern 2021). Examples include jets of cooling fluid impinging on the sides of the rotor and stator (Gronwald and Kern 2021). Another option is to use nozzles in a hollow rotor shaft through which liquid flows to distribute coolant in the motor compartment and from which the stator end windings are sprayed with coolant (Carriero et al. 2018). For these direct cooling systems, oil is used because of its favorable properties such as high thermal conductivity, electrical insulation, and diamagnetism (Carriero et al. 2018).
In direct liquid cooling applications, the oil can penetrate the air gap between the rotor and stator, which can cause additional losses due to shear forces and friction (Gronwald and Kern 2021; Ponomarev et al. 2012). In previous studies, researchers have examined the phenomenon of friction losses in electric motors and generic setups. Friction torque was the focus of a study conducted by Abdelli et al. (2020). They found that the friction torque increased as the rotational speed increased, reaching a peak in torque at low rotational speeds, and then decreased slightly before increasing again with a smaller slope than at the beginning. Assaad et al. (2018) experimentally investigated mechanical losses in an internally oil-cooled motor by measuring the resistive torque. The results indicate that losses increase with rotational speed and liquid injection flow rate. The contact between oil and rotor parts and the formation of foam are described as phenomena leading to high losses.
Optical methods are suitable for investigating the processes in direct liquid cooling systems for electric motors or their subsystems. Beck et al. (2021) analyzed the flow pattern of a coolant liquid jet emerging from a step hole in the rotor by comparing high-speed images with numerical simulations. Davin et al. (2015) analyzed the oil cooling effect of different injectors on the stator winding in a highly realistic electric motor, supplemented with visualizations of the flow pattern. Ha et al. (2021) presented photographs of the stator through a transparent housing in their study on direct spray cooling systems.
Optical access to the gap between stator and rotor in real electric motors proves more challenging. To the knowledge of the authors, no optical, experimental investigations characterizing the two-phase flow in the air gap of directly oil-cooled electric motors have been reported yet. To fill this knowledge gap, this study investigates a forced convective heat transfer method for electric motors using oil as a coolant. The focus is on the two-phase flow in the gap between the stator and the rotor and mechanical losses. An optically accessible generic test rig, mimicking geometric characteristics of a direct oil-cooled electric motor, is used with well-defined boundary conditions. Rotational speeds up to 2000 rpm are examined in order to fundamentally investigate the two-phase flow. Even if electric motors are operated at higher speeds, this already provides an insight into the most important flow regimes. At 2000 rpm, the oil in the air gap already creates a prominent oil film on the stator, which is separated from the rotor by a layer of air. Even if details in the oil film, such as the thickness, change with increasing speed, all relevant flow regimes are covered by this investigation.
In the first step, the two-phase flow is visualized using photographs and high-speed laser-induced fluorescence (LIF) imaging. The two-phase flow is categorized into three regimes based on their specific characteristics. In the second step, torque measurements are carried out for motor operation with single-phase and two-phase flow conditions. The resulting torque difference is linked to the two-phase flow and its respective flow characteristics.
2 Experimental approach
2.1 Test rig
This study presents a test rig that simulates the geometric characteristics of a real motor. The test rig is a generic model of a synchronous motor consisting of a rotor and a stator (Fig. 1). Both are passive parts and do not contain any permanent magnets or electrical components. The rotor is driven by an external electric motor (Dunkermotoren BG 95 × 40 dPro), which is mounted on a torque measurement flange described below. The rotational speed of the test rig is restricted to 2000 rpm and to operation at room temperature (20 °C). The test rig is specifically designed to fundamentally investigate the appearance and effects of the two-phase flow in the air gap.

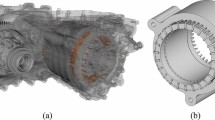
a Cross-sectional schematics of the test rig (not to scale) and b Photograph of the test rig
The main part of the test rig is shown in Fig. 1 as a cross-sectional drawing in a) and a photograph of the test rig in b). The central part of the cylindrical aluminum rotor has an axial length of L = 100 mm and a diameter of dR = 156 mm. Two rotor variants are utilized in this study, which differ in their surface treatment. An untreated aluminum rotor is used for torque measurements and to visualize the two-phase flow with photographs, as this provides better visibility of the flow structures. A black anodized aluminum rotor is employed for LIF measurements to suppress laser reflections. There is no evidence that the two-phase flow regimes depend on the rotor surface.
The stator is made of polymethylmethacrylate (PMMA). Its central section has a main diameter of dS = 158 mm, an axial length of L = 100 mm, which is flanked by end spaces on each side with a diameter of 210 mm. These end spaces are connected to each other by a tube to ensure pressure equalization. The central sections of the stator and the rotor are aligned with each other, as shown in Fig. 1a, forming the air gap investigated in this study. For manufacturing purposes, the stator is composed of four quarters. On its inside, the stator features 72 rectangular, equidistant, axial grooves to mimic the surface structure of a real stator. Figure 2a is an isometric representation of the four assembled stator parts also showing the most relevant hidden lines which highlight the axial grooves. The sectional view of an air gap section is shown in Fig. 2c. In the following, the section of the air gap with height d = 1 mm is called annular gap and the section with g = 0.8 mm groove. The grooves are b = 1.6 mm wide.

a Isometric representation of assembled stator, b Top view of the stator quarter with the area of interest for LIF recordings and c Sectional view of the rotor and stator with the grooves
To investigate the two-phase flow within the gap, a liquid at room temperature and at a constant flow rate is injected into the air gap through a lance of 2.5 mminner diameter located on the lower left-hand side, as shown in Fig. 1a. In this study, an oil is selected to model direct liquid cooling. The lance ends 1.6 mm in front of the gap. Using the lance for oil injection sets the boundary conditions independent of the investigated rotational speed. Compared to rotor nozzles, where the jet break up may vary with the operating point, this method of oil injection is independent of the rotational speed. Driven by gravity, the oil exits the test rig through port 1 and port 2 into collection containers. In preliminary studies, the oil volume flow rate was varied from approximately 0.3 l/min to 0.7 l/min. With increasing volume flow rate, the initialization of a stationary flow regime is faster. However, once stationary, the two-phase flow regimes discussed below are qualitatively independent of the flow rates tested. Therefore, only the flow rate of 0.5 ± 0.1 l/min (68%) is reported in this paper. The Reynolds number of the oil flow in the lance is Re = 664.
The selected oil for the experiments (Fuchs Lubricants FES 821–6500 (VP)) simulates the properties of an automatic transmission fluid used in a real motor at the typical operating temperatures. At room temperature, the used oil has a comparable density, viscosity, and surface tension as the real automatic transmission fluid at 80 °C. At 20 °C, the oil has a density of 0.8206 g/ml, kinematic viscosity of 6.39 mm2/s, and a surface tension of 23.8 mN/m. During experiments, the oil temperature increases. The maximum detected temperature difference between injection and the outlet at the ports is 7.4 °C, but for 64% of all measurements, it is below 5 °C. The temperature difference alters the oil properties slightly; however, the flow phenomena are considered unaffected. The oil appears blue in the visualization experiments.
2.2 Torque measurement flange
The friction loss varies depending on the two-phase flow regime in the air gap. At constant speed, the oil injection results in a change in torque provided by the external motor. This torque change can be measured with strain gauges mounted on a measuring flange. Figure 3 shows this custom-designed flange, which consists of an inner and an outer part connected by four beams. The external motor is mounted on the inner part, while the outer part is fixed to a frame on an optical table. Strain gauges (nominal resistance 350 Ω) are placed at the top and bottom of the two horizontal beams, as indicated by the black markings in Fig. 3. The strain gauges’ material is compatible with the flange material to prevent the influence of temperature changes. For strain measurements, the gauges are wired in a Wheatstone Bridge. The bridge is powered by a lock-in amplifier (MODEL SR830 DSP Lock-In Amplifier from Stanford Research Systems), which alternates the voltage with a fixed frequency and amplitude. The bridge voltage also measured by the lock-in amplifier has a signal-to-noise ratio of at least 400. The Wheatstone bridge is detuned with a potentiometer allowing to use settings of the lock-in amplifier, leading to a sufficient measuring range and sensitivity. The measured voltage across the bridge is converted by the lock-in amplifier to an output voltage ranging between − 10 and 10 V, which is recorded by a Tinkerforge Dual Analog In Bricklet. To assign the measured voltage difference due to the liquid injection to a torque difference, the torque measuring flange is calibrated with known weights on a lever. The calibration function is determined using a linear fit with a slope of 4.84 V/Nm and a mean width of the 95% confidence interval of 0.0157 Nm. The calibration function is valid for the entire speed range under consideration. Since the measured voltages are three orders of magnitude higher than the systematic error of the data acquisition system, it is neglected here, and only statistical errors are considered. Temperature measurements on the right bearing and the torque measurement flange (Pt 100) showed constant conditions, so the torque differences during experiments can be attributed solely to the injected oil.

Front view of torque measurement flange with the strain gauges on the top and bottom of the two horizontal beams shown in black
2.3 Measurement protocol
All measurements are performed according to the same protocol. After each measurement run, the rotor is kept still for at least 3 min to allow the oil to drain from the setup. Due to the horizontal orientation of the test rig and the fact that the oil is drained only by gravity, some residual oil is inevitably left at the bottom of the air gap. The constant waiting time between the measurement runs provides independence from the previous runs and ensures similar starting conditions.
A measurement run comprises four phases. Figure 4 shows the raw voltage signal of the torque measurement flange at 1000 rpm, with phases 1 to 4 highlighted in different colors. During phase 1, the rotor stands still and no oil is injected for at least 1 min at the beginning of each measurement run to ensure thermal equilibrium of the torque measurement flange. Only measurements with no detectable thermal drift in measurement phase 1 (< ± 0.05 V/s on average) were used for evaluation. A variation in the exact initial voltage level is observed over time, but this does not have any impact on the measurements as confirmed by the calibration.

Raw voltage signal at 1000 rpm indicating the four measurement phases
Transitioning to phase 2, the speed is increased linearly to the target speed and kept constant for at least 2 min. Phase 2 lasts from the time that the set rotational speed is reached and the initial voltage oscillation has decayed until the oil supply is activated. It establishes the single-phase air gap condition and serves as the baseline for the torque measurements. As shown in Fig. 4, the rotational speed causes the measured voltage to drop due to the selected lock-in amplifier settings.
Oil injection is then started with a constant mass flow rate. The start of phase 3 is defined at the time that the two-phase flow regime in the air gap reaches a stationary state after the initial filling phase. This stationary state is maintained for at least 2 min. The impact of the stationary two-phase flow regime on the torque is evaluated by calculating the mean voltage difference between the baseline in phase 2 and the voltage in phase 3, from which a torque difference is inferred.
At the end of phase 3, the oil injection is stopped at constant rotational speed to study the recovery of the air gap state without oil supply, as in phase 2. This fourth phase is maintained for at least 1 min. Phase 4 is terminated by stopping the rotation. In test runs, phase 4 is extended to 15 min for rotational speeds up to 800 rpm to observe the evolution of the state of the air gap. For higher rotational speeds, this is not required because the air gap is drained rapidly from the oil after injection stop as described later. These tests are repeated at least three times to ensure an independent assessment of the air gap state without oil injection but rotor rotation. After stopping the rotation, the gap is quickly drained from any potentially remaining oil except for the above-mentioned residue.
2.4 Two-phase flow visualization
The aim of the two-phase flow visualization is to categorize the flow regime inside the air gap. Rotational speeds ranging from 100 to 2000 rpm are examined in 100 rpm increments to observe regime transitions.
The first method to visualize the two-phase flow regime in the air gap is photography. For this purpose, a Nikon Z6 camera equipped with a 50 mm lens (F/4) and an exposure time of 0.033 s is used. Figure 5 depicts only the central section of the air gap of axial length L = 100 mm (see Fig. 1b). The oil distribution that occurs at 100 rpm in phase 3 can be seen in Fig. 5. The oil appears in blue color in the center of the air gap with the untreated aluminum rotor visible to the left and right of it. This interesting flow appearance as shown in Fig. 5 will be discussed in more detail later.

Photograph of Flow Regime 1 at 100 rpm
For visualization with shorter exposure times and for video recording, the LIF method is used. The oil contains a dye added by the manufacturer that fluoresces in the visible range when excited by a laser at 532 nm. The transparent PMMA stator, the black anodized rotor, and the surrounding air show no fluorescence signal under these conditions. Thus, the fluorescence signal solely stems from the oil in the air gap.
The optical setup and a front view of the test rig are shown in Fig. 6. A high-speed frequency-doubled Nd:YVO4 laser (Edgewave GmbH, 532 nm, 0.7 mJ/pulse) is used for excitation. The laser beam is expanded by cylindrical lenses (− 100 mm and− 400 mm) and limited by an iris to obtain volumetric illumination with a rectangular cross-section. A beam splitter directs 70% of the laser energy into the air gap. The fluorescence signal is recorded by camera 1, a high-speed CMOS camera (Phantom V711, Vision Research), equipped with a Nikon 180 mm macro lens (f 5.6) and a long-pass filter (SCHOTT AG, OG570, 3 mm) to suppress reflections at the excitation wavelength. Figure 1a shows the perspective of camera 1, with the resulting area of interest displayed in Fig. 2b by a dashed box. It is located centrally at the top of the stator and measures about 21 mm in the axial z direction and 16 mm in y direction. The air gap is viewed through the stator, and thus, as indicated by Fig. 2b, the stator grooves are contained in the LIF images. Thirty percent of the laser energy is reflected into an oil-filled reference cell, which is recorded by camera 2, which is also a high-speed CMOS camera (Phantom V711, Vision Research). Camera 2 is equipped with the same lens and filter as camera 1. The recordings of camera 2 are used in the image processing.

Optical setup for LIF recordings
Data are acquired using Davis 10.2 (LaVision). The high-speed cameras and the laser are triggered and synchronized by a PTU X (LaVision). Rotational speeds of 100 rpm, 500 rpm, 1000 rpm, 1500 rpm, and 2000 rpm are investigated using LIF. The laser excitation frequency and the frame rate of the cameras are set according to the rotational speed to obtain 300 images per rotation. At least 60 rotations in total are recorded for each rotational speed.
To characterize the rotational speeds in a dimensionless way, the gas Reynolds number is defined as \({\text{Re}}_{G} = \frac{{\Omega \cdot r_{R} \cdot d}}{\nu }\) (angular frequency \(\Omega\), rotor radius \({r}_{R}\), gap height d, kinematic viscosity of dry air \(\upnu\)), as is used for smooth annular gaps, i.e., the influence of the grooves is not taken into account. The resulting gas Reynolds numbers are given in Table 1.
2.5 Image processing
A target pattern is used for dewarping the images and to transform the pixels in physical space coordinates. For this purpose, a dot pattern is printed on transparent paper and inserted into the air gap before the measurements. The paper is positioned at the inside of the stator's annular gap section (see Fig. 2c) because the flow features evaluated in the following are located primarily on or near the stator surface. The calibration function calculated by Davis 10.2 results in 24.8 pixel/mm and an RMS fit error of 3.5 pixels over the entire image.
To account for the inhomogeneous laser beam profile and shot-to-shot laser intensity variations, the recordings of the reference cell by camera 2 are used. Prior to the measurements, comb structures are positioned in the beam path, producing dark lines in the images of the reference cell and the air gap completely filled with oil. The comb recordings are used to match the images of both cameras. Average coefficients from the mapping of all comb recordings are used to correct the air gap images with the simultaneously recorded image of the reference cell. Thus, the intensity in the following LIF recordings is given as intensity relative to the reference cell. It is worth noting that some remnants of the laser beam profile are visible as almost vertical dark and bright lines across the entire image, for example in Fig. 8. Furthermore, minor machining marks on the stator can be seen as exemplified in Fig. 8 at z ≈ 3 to 9 mm and y ≈ 12 to 15 mm.
All data and image processing is performed in MATLAB 2022b. The flow structures visible in the dewarped and corrected LIF images like bubbles or waves are analyzed based on background subtracted images and gradient criteria. In the case of bubbles, their center is discretized by the MATLAB function regionprops. For the detection of wave fronts, the gradient suffices. The velocity of these structures is determined by their displacement in negative y direction, as they mainly move in this direction. All figures in this work are generated using MATLAB 2022b and Inkscape 1.3.2.
3 Results
3.1 Two-phase flow regimes
The two-phase flow in the air gap is visualized in a first step by photography and in a second step by high-speed LIF imaging. For the investigated speed range of 100 to 2000 rpm, three different flow regimes are identified: Flow Regime 1 corresponds to an air gap locally filled with oil, Flow Regime 2 is characterized by foam formation, and in Flow Regime 3, oil films on the stator and rotor surface are present. There is also a transitional Flow Regime 3*, in which Flow Regimes 2 and 3 alternate. The regimes are illustrated in the following using representative photographs and LIF images. For better illustration, videos generated from the LIF recordings for each flow regime are provided in the supplementary material (Flow Regime 1: Online Source Movie 1 and 2, Flow Regime 2: Online Source Movie 3, Flow Regime 3: Online Source Movie 4, Flow Regime 3*: Online Source Movie 5).
3.1.1 Flow Regime 1: 100 to 500 rpm
Figure 5 shows an image of the descending flank (direction of rotation is downwards), of the test rig at 100 rpm. The flow contracts on the descending flank, while the air gap is filled over the entire axial length on the ascending flank (not shown). This phenomenon is reproducible even at changed direction of rotation indicating it to be a characteristic of Flow Regime 1. The contraction decreases with increasing speed, as shown in Fig. 7 for 500 rpm. This means that the total amount of oil in the gap increases with increasing speed. In Flow Regime 1, the air gap is completely filled over its height in radial direction in the wetted regions, which is assumed due to the dark blue color characteristic. The fine, darker, vertical stripes at 500 rpm visible in Fig. 7 are due to moving air bubbles included in the oil and the long exposure time.

Photograph of Flow Regime 1 at 500 rpm
LIF images in Fig. 8 and Fig. 10 show the central section of the gap as indicated in Fig. 2b in higher spatial and temporal resolution for 100 rpm and 500 rpm, respectively. The grooves at the inside of the stator are framed by the dotted, red lines. Due to the rotor rotation, the fluid moves in negative y direction.

LIF sequence at 100 rpm (Flow Regime 1) with zooms over 6 ms (A corresponding video is found in Online Source Movie 1)
At 100 rpm (Fig. 8), dark, non-fluorescent air bubbles are clearly visible inside the grooves and in the annular gap due to their relatively large size. Throughout the LIF recording period, the air bubbles within the grooves manifest minor axial movement. Some smaller bubbles in the grooves disappear with time. Recirculation inside the grooves is assumed due to the slow movement of some smaller air bubbles in positive y direction within the groove. These bubbles disappear at one end of the groove and reappear at a similar axial position but at the opposite end of the groove in y direction. Interestingly, bubbles in the annular gap appear exclusively near the axial gap center. The LIF images in Fig. 8 show a bubble in the annular gap at z = 16 mm marked by arrows which clearly moves between the two time steps. The corresponding video in the supplementary material (Online Source Movie 1) shows how the bubble loses contrast when passing the lower groove at constant speed. This is caused by the fluorescing oil above the bubble. The speed of the bubbles at 100 rpm is determined from their displacement in successive LIF images. Figure 9 shows a histogram of the bubble velocities with a fitted normal distribution. The mean bubble velocity is (0.12 ± 0.05) m/s (68%). This is seven times smaller than the surface speed of the rotor of 0.8 m/s, which indicates that the bubbles move on a trajectory closer to the stator.

Histogram of bubble velocity distribution at 100 rpm
As the rotational speed increases, the bubble size decreases. Figure 10 shows an instantaneous LIF image at 500 rpm. Bubbles do exist at this operating point but are barely visible in Fig. 10. Thus, the reader is referred to Online Source Movie 2.

LIF image at 500 rpm (Flow Regime 1) with zoom (A corresponding video is found in Online Source Movie 2)
In the grooves, most of the bubbles are located closely to the lower edge of the groove. This indicates that these bubbles are trapped inside the groove and are pushed by shear forces to its lower edge. As it becomes evident from Online Source Movie 2, the movement of bubbles in the grooves is quite chaotic. They move in axial direction, but their net axial position change within the movie is little. Regardless of their size, bubbles in the groove region move in both the positive and negative y direction. A movement in positive y direction indicates a recirculation inside the groove caused by the interaction of the annular gap flow and the groove feature. Some smaller bubbles within the grooves disappear with time. No statement can be made about their remaining. Unlike at 100 rpm, at 500 rpm, bubbles are also observed moving from the groove to the gap (see Online Source Movie 2, z ≈ 18 mm, y ≈ 12 mm, starting from t0 + 32 ms). The air bubbles are not assumed to follow the oil movement closely due to their interaction with the surrounding surfaces. However, the bubbles leaving the grooves indicate that also oil moves from the grooves into the annular gap resulting in a mass exchange between the grooves and the annular gap.
The bubbles in the annular gap move faster at constant speed and only in the negative y direction.
After switching off the oil injection while the rotor speed remained constant, most of the oil remained in the air gap for more than 15 min at all operating points in Flow Regime 1.
3.1.2 Flow Regime 2: 600 to 1200 rpm
Flow Regime 2 occurs between 600 and 1200 rpm. Figure 11 shows a representative photograph at 1000 rpm. The color of the flow appears light blue due to numerous small air bubbles that form a foam, which expands over the entire axial length of the gap. The apparently regular, vertical stripes in Fig. 11 are attributed to the long exposure time of the photograph as the corresponding LIF images do not show this regular pattern.

Photograph of Flow Regime 2 at 1000 rpm
A sequence of LIF images at 1000 rpm is shown in Fig. 12, which are also included in the corresponding Online Source Movie 3 in the supplementary material. The foam visible in the annular gap occasionally ruptures indicated by the dark regions, which occurs irregularly in space and time. The rupture of the visible foam surface suggests that rotor and stator are at least locally not connected by the foam. The flow in the grooves, however, remains largely unaffected by the visible rupture of the foam surface. Nevertheless, the flow in the annular gap drives a recirculating flow in the grooves. This can be clearly seen in the movie of the LIF images in the upper groove at z ≈ 15 mm, which shows a larger bubble in the two-phase flow in the grooves that moves in positive y direction. Then, it disappears. This is due to the fact that structures on the side of the oil facing the camera are visible with significantly higher contrast than from deeper areas due to light scattering at the phase boundaries of the bubbles and light absorption. The flow properties in the groove do not allow stating if the bubble submerges and emerges at the lower groove end or ruptures. The recirculation zone extends across the entire width of the groove.

LIF sequence at 1000 rpm (Flow Regime 2) over 10 ms (A corresponding video is found in Online Source Movie 3)
At 600 rpm and 700 rpm, most of the oil remains in the air gap as a foam, even after the oil supply has been turned off for more than 15 min. At higher speeds, the oil escapes from the gap, leaving only a residue at the bottom of the gap. The emptying time decreases with increasing speed. At 800 rpm, draining takes about 15 min but at 1000 rpm only about 50 s. Any remaining foam in the air gap breaks down quickly after the rotation stops and no foam accumulation is observed in the test stand or in the collection containers. The foam in the air gap is maintained solely by the rotation of the rotor.
3.1.3 Flow Regime 3: 1700 to 2000 rpm
At speeds between 1700 and 2000 rpm, a film forms on the stator surface due to strong centrifugal forces, but also some oil is present on the rotor. Figure 13 shows a section of the air gap on the descending flank at 2000 rpm, where the thin oil film on the stator appears as a slightly bluish haze in the annular gap between the grooves over, which waves are moving slowly compared to the rotational speed. The stator grooves are filled with oil, which leads to a stronger blue coloration, but also bubbles are present, which can be seen best in the upper grooves in Fig. 13. There is a higher amount of oil at the bottom of the gap close to where the oil is injected. On the ascending flank of the stator, a thicker and therefore more color-intense film is observed up to approximately half the rotor height (not shown).

Zoom into photograph of Flow Regime 3 at 2000 rpm
The LIF images at 2000 rpm (Fig. 14) show one wave front moving across the stator film. Film areas that have not yet been passed by the wave have a rather low relative intensity indicating a thin film thickness. Thus, the wave carries oil in negative y direction. The wave speeds in negative y direction are extracted from the LIF images. Since the air bubbles in the grooves obstruct the view onto the wave fronts, the waves were analyzed only within the annular gap between the grooves. Figure 15 shows the histogram of the wave front velocities with a fitted gamma distribution for 2000 rpm. The mean wave velocity is 0.52 ± 0.11 m/s (68%). At a rotor surface speed of 16.34 m/s at 2000 rpm, the wave velocity is about 3% of it. In the annular gap, the stator film contains many small bubbles that remain stationary. However, as a wave front passes over the film, some bubbles are carried along by the shear forces. But compared to the speed of the wavefront, these bubbles move more slowly.

LIF sequence at 2000 rpm (Flow Regime 3) over 17.5 ms (A corresponding video is found in Online Source Movie 4)

Histogram of wave velocity distribution at 2000 rpm
Occasionally, droplets detach from the rotor and impact on the stator film (see Online Source Movie 4, z ≈ 7mm, y ≈ 10 mm, t0 + 14.2 ms). This is an indication that an oil film of considerable thickness exists on the rotor and that the films on the rotor and stator are separated by a layer of air.
In the grooves, many large bubbles are observed (Fig. 13 and Fig. 14). These bubbles hardly move and are only slightly affected by the flow in the annular gap. A slight movement of the bubbles occurs only when a wave passes over a groove. In some cases, a passing wave carries a bubble from the groove, as can be seen in the last two time steps of Fig. 14 at z ≈ 13 mm, y ≈ 12 mm marked with a white arrow. Some bubbles, such as the encircled one at z ≈ 8 mm, y ≈ 12 mm in Fig. 14, partially penetrate the annular gap and then retract back into the groove due to surface tension. Extracted bubbles may burst within the recording time. Some bubbles in the grooves disappear or merge with neighboring bubbles to form a larger one. In the last two time steps of Fig. 14, two bubbles merge in the boxed area at z ≈ 15 mm and y ≈ 13 mm. However, the majority of bubbles in the grooves persist throughout the recording time, as static bubbles near a wetted wall are attracted to it and remain attached to the wall (Bikerman 1973).
After the oil injection is stopped, the entire air gap is drained apart from a residue on the bottom within approximately 30 s.
3.1.4 Flow Regime 3*: 1300 to 1600 rpm
A peculiarity of the two-phase flow in the air gap is Flow Regime 3*, occurring between 1300 and 1600 rpm. This regime consists of two alternating stages, switching between Flow Regimes 2 and 3. The stage comparable to Flow Regime 3, referred to as the base regime, is intermittently interrupted by stage 2 similar to Flow Regime 2. In LIF recordings, the change between both stages happens only once due to the limited recording time. However, observations over the 2 min in measurement phase 3 (rotation and oil injection) show a periodicity of the change phenomenon and suggest that stage 2 persists for shorter periods compared to the base regime. Furthermore, the time in which stage 2 is seen becomes shorter with increasing rotational speed.
Figure 16 displays a sequence of instantaneous LIF images at 1500 rpm with a time step of 100 ms. Online Source Movie 5 animates this recording sequence. The first four images in Fig. 16 show the base regime comparable to Flow Regime 3. A film with small bubbles is visible on the stator. This conclusion is inferred from the minor movement of bubbles and distinct film structures. The overall higher relative LIF intensity at 1500 rpm compared to 2000 rpm implies that Flow Regime 3* features a thicker film, which contains more bubbles. Waves travel over the film like in Flow Regime 3, but the wave fronts appear more irregular.

LIF sequence at 1500 rpm (Flow Regime 3*) over 500 ms (A corresponding video is found in Online Source Movie 5)
During the base regime of Flow Regime 3*, bright spots which appear to be on the rotor surface are observed to move in the stator film’s background, and droplets impact on the stator film. Such a droplet impact is captured in Fig. 17 at z ≈ 19 mm and y ≈ 8 mm, which is also marked with an arrow. Therefore, there is a separation between a rotor and stator film with air in-between, like that seen in Flow Regime 3.

LIF sequence at 1500 rpm (Flow Regime 3*) over 0.4 ms showing a droplet impact on the stator film
As in Flow Regime 3, the grooves in the base regime of Flow Regime 3* contain bubbles of different sizes. They hardly move unless a wave passes over the groove. A passing wave can extract bubbles from the groove, and sometimes bubbles collide, merging to larger ones. Nevertheless, even in the base regime, the grooves’ appearance changes over the course of a few hundred milliseconds as seen in the first four images in Fig. 16.
In stage 2 of Flow Regime 3*, as shown in the last two images in Fig. 16, the film is accelerated, and the flow becomes similar to Flow Regime 2. During this stage, most of the oil is in motion. When switching to stage 2, a recirculation in the grooves begins but terminates rather quickly when returning to the base regime. Large bubbles are extracted from the groove when stage 2 starts. In the grooves, bubbles move axially in a chaotic manner. After the flow returns to the base regime, only larger bubbles remain in the grooves.
After the oil injection is stopped, the air gap drains within 40 to 60 s, although there is some residual oil at the bottom of the gap.
3.2 Torque measurement
The aim of the torque measurements is to quantify the mechanical losses due to the injected oil. For this purpose, the torque difference between measurement phase 3 with oil injection and measurement phase 2 without oil injection is calculated (see Fig. 4). The higher the torque difference, the higher the mechanical losses. The different rotational speeds were investigated in random order. This made it possible to rule out any dependence of the speed under investigation on the previous operating point. The torque measurements were performed 4 to 12 times for each operating point. Figure 18 shows the mean torque difference for each investigated rotational speed as well as the 68% confidence interval. The identified flow regimes are shown as differently filled boxes.

Mean torque difference and flow regimes with error bars indicating the 68% the confidence interval
In Flow Regime 1, the increase in torque difference with rotational speed is reasonable due to the friction of the oil and the fully filled gap in radial direction in the wetted area. As the speed increases, the oil continuously wets more of the air gap in axial direction, contributing to the increase in torque difference. Furthermore, for the higher speeds in Flow Regime 1, a fluid exchange between the grooves and annular gap was observed for 500 rpm, which also contributes to the losses. Although the number of air bubbles increases with the rotational speed, it is considered insignificant in influencing the measured torque difference since they only account for a small proportion of the two-phase flow volume.
The highest torque difference is found in Flow Regime 2, in which the air gap is filled with foam. This is due to the fact that foams typically have higher viscosities than pure liquids (Kroezen et al. 1988; Martinsson and Du Sichen 2016) and foam formation requires energy due to the increase of surface area (Slama 2023). Foam is an accumulation of bubbles separated by thin liquid film ligaments. When foams are in motion, as in the air gap, they dynamically vary, which depends on various parameters, such as gas compressibility, bubble size, bubble size distribution, bubble formation, and coalescence. This bubble rearrangement is a nonlinear process of high complexity (Bogdanovic et al. 2009).
At 1000 rpm, a maximum in the torque difference is observed, which is followed by a continuous decrease. This can be explained by a changed foam structure and a possible detachment of the foam from the rotor such that rotor and stator are not connected. The peak torque difference at 1000 rpm is qualitatively comparable to the findings of Abdelli et al. (2020) in a realistic electric motor and Trauter and Vialon (1979) in a viscosimeter. For their investigations, Trauter and Vialon used an experimental setup that is conceptually similar to an electric motor, consisting of a rotating inner cylinder placed inside a stationary coaxial outer cylinder, that created a foam of a high molecular fluid. As the rotational speed was increased, an initial increase in torque was observed. The peak torque was followed by a steep decrease in torque. Trauter and Vialon identified a shear rate threshold above which the foam detached from the rotor and the measured torque remained close to 0.
Beyond 1000 rpm, the torque difference decreases continuously up to 1700 rpm. This range coincides with the Flow Regime 3*, which is characterized by an alteration of Flow Regimes 2 and 3. While Flow Regime 2 is characterized by a foam, the rotor and stator in Flow Regime 3 are separated by a layer of air. As the speed increases, the intervals in which Flow Regime 2 is observed become shorter. As a result, the torque difference is increasingly dominated by Flow Regime 3, causing the torque difference to decrease.
In Flow Regime 3, the wall films on the stator and rotor are separated by an air layer. Interestingly, the measured torque difference drops below that at 100 rpm and even consistently to a value below zero. Thus, the mechanical losses in measurement phase 2 without oil injection are higher than with oil injection. This is because in Flow Regime 3, the grooves are filled with oil, creating a smoother surface for the air flow. As a result, the air flow is less turbulent with lower frictional losses. This is also consistent with the observation of Meier et al. (2022), who observed in a numerical study that the air flow in an annular gap with grooves is more turbulent and causes more drag losses than in a simple smooth annular gap.
4 Conclusion
In this work, an optically accessible test rig was set up with the most important geometric properties of an electric motor with direct oil cooling. The two-phase flow in the air gap between the rotor and stator was visualized, and its influence on the mechanical losses was investigated by comparing torque measurements in the two-phase and single-phase flow. Using photographs and high-speed LIF imaging, the two-phase flow was classified into three regimes depending on the speed. In Flow Regime 1 (100 to 500 rpm), the air gap gradually filled over the entire axial width, while in the wetted area, it was already filled with oil over the entire gap height. Therefore, a continuous increase in torque difference was observed. Flow Regime 2 (600 to 1200 rpm) was characterized by a foam. This resulted in a maximum torque difference at 1000 rpm, which decreased again for higher speeds. In Flow Regime 3, the stator was wetted with oil, which also completely filled the stator grooves. This film was separated from the rotor film by a layer of air. The resulting smoothening of the stator surface prevented turbulence enhancement of the air flow in the stator grooves, which meant that the measured torque was even lower than the torque for single-phase air operation.
The observations in this work have a direct influence on the design of electric motors with direct oil cooling. First, the LIF measurements showed hardly any axial movement of the oil, which indicates limited oil exchange between the air gap and the environment. Thus, the heat exchange is limited in the investigated configuration to heat conduction, convection, and advection within the gap. Heat conduction in the gap between the rotor and stator requires oil contact on both sides, which is only possible at very low speeds (Flow Regime 1). However, as the heat losses in an electric motor are relatively low at low speeds and are concentrated on the stator windings, the oil in the air gap is not expected to contribute significantly to the overall cooling of the electric motor. As the oil remains in the gap for a long time even after oil injection has ended, it represents an unnecessary increase in friction losses. The same applies to Flow Regime 2, in which foam formation was observed. In Flow Regime 3, essentially only the forced air convection between the films on the stator and rotor contributes to the heat exchange. The droplets that detach from the rotor and hit the stator are only observed sporadically and should therefore hardly contribute to cooling. However, the reduction of friction losses in the air gap by filling the stator grooves should be rated positively.
Overall, it can be said that the oil in the air gap does not necessarily contribute to cooling, but its detrimental effect on mechanical losses is limited or has even a positive effect at higher speeds. Electric motors operate at higher rotational speeds then presented in this study. However, the centrifugal forces are expected to dominate resulting in stator films like in Flow Regime 3 at higher rotational speeds. For technology development, a compromise must therefore be found between oil injection, the required cooling capacity, and mechanical losses at all operating points. To support this, future studies should investigate the two-phase flow and its influence on the torque at higher rotational speeds.
Data availability
Data sets generated during the current study are available from B. Böhm (boehm@rsm.tu-darmstadt.de) on request.
References
Abdelli A, Chareyron B, Nasr A (2020) Separation of the losses at no load conditions in the electric motor with oil cooling shaft. In: 2020 23rd international conference on electrical machines and systems (ICEMS). IEEE, pp 1683–1688. https://doi.org/10.23919/ICEMS50442.2020.9290851
Assaad B, Mikati K, Tran TV, Negre E (2018) Experimental study of oil cooled induction motor for hybrid and electric vehicles. In: 2018 XIII international conference on electrical machines (ICEM). IEEE, pp 1195–1200. https://doi.org/10.1109/ICELMACH.2018.8507058
Bauer (2019) Verlustanalyse bei elektrischen Maschinen für Elektro- und Hybridfahrzeuge zur Weiterverarbeitung in thermischen Netzwerkmodellen. Springer Fachmedien Wiesbaden, Wiesbaden
Beck C, Schorr J, Echtle H, Verhagen J, Jooss A, Krüger C, Bargende M (2021) Numerical and experimental investigation of flow phenomena in rotating step-holes for direct-spray-cooled electric motors. Int J Engine Res 22:1731–1740. https://doi.org/10.1177/1468087420918046
Beck C (2020) Numerische Analyse der Zweiphasenströmung und Kühlwirkung in nasslaufenden Elektromotoren, 1st edn. Wissenschaftliche Reihe Fahrzeugtechnik Universität Stuttgart. Springer Fachmedien Wiesbaden; Springer Vieweg, Wiesbaden. https://doi.org/10.1007/978-3-658-32607-4
Bikerman JJ (1973) Foams: applied physics and engineering 10. Springer, Berlin
Bogdanovic M, Gajbhiye RN, Kam SI (2009) Experimental study of foam flow in horizontal pipes: two flow regimes and its implications. Colloids Surf A 344:56–71. https://doi.org/10.1016/j.colsurfa.2009.02.019
Carriero A, Locatelli M, Ramakrishnan K, Mastinu G, Gobbi M (2018) A review of the state of the art of electric traction motors cooling techniques. In: SAE Technical Paper Series. SAE International400 Commonwealth Drive, Warrendale, PA, United States. https://doi.org/10.4271/2018-01-0057
Davin T, Pellé J, Harmand S, Yu R (2015) Experimental study of oil cooling systems for electric motors. Appl Therm Eng 75:1–13. https://doi.org/10.1016/j.applthermaleng.2014.10.060
Doppelbauer M (2020) Grundlagen der Elektromobilität: Technik, Praxis, Energie und Umwelt, 1st edn. Springer Fachmedien Wiesbaden, Wiesbaden. https://doi.org/10.1007/978-3-658-29730-5
European Comission (2021) Communication from the commission to the european parliament, the council, the european economic and social committee and the committee of the regions: ‘Fit for 55’: delivering the EU’s 2030 Climate Target on the way to climate neutrality
European Parliament and Council (2023) Regulation (EU) 2023/851 of the European Parliament and of the Council of 19 April 2023 amending Regulation (EU) 2019/631 as regards strengthening the CO2 emission performance standards for new passenger cars and new light commercial vehicles in line with the Union’s increased climate ambition. Official Journal of the European Union:L 110/5-L 110/20
Gronwald P-O, Kern TA (2021) Traction motor cooling systems: a literature review and comparative study. IEEE Trans Transp Electrific 7:2892–2913. https://doi.org/10.1109/TTE.2021.3075844
Ha T, Han NG, Kim MS, Rho KH, Kim DK (2021) Experimental study on behavior of coolants, particularly the oil-cooling method, in electric vehicle motors using hairpin winding. Energies 14:956. https://doi.org/10.3390/en14040956
Kroezen ABJ, Wassink JG, Schipper CAC (1988) The flow properties of foam. J Soc Dyers Colour 104:393–400. https://doi.org/10.1111/j.1478-4408.1988.tb01138.x
Martinsson J, Sichen Du (2016) Study on apparent viscosity of foam and droplet movement using a cold model. Steel Res Int 87:712–719. https://doi.org/10.1002/srin.201500200
Meier V, Beck C, Krüger C, Ernst M, Hasse C (2022) Numerische Analyse der Strömung am Eintritt des Luftspalts einer permanenterregten Synchronmaschine. Elektrotech Inftech 139:222–229. https://doi.org/10.1007/s00502-022-01001-8
Nam KH (2019) AC motor control and electrical vehicle applications. CRC Press, Boca Raton. https://doi.org/10.1201/9781315200149
Ponomarev P, Polikarpova M, Pyrhonen J (2012) Thermal modeling of directly-oil-cooled permanent magnet synchronous machine. In: 2012 XXth international conference on electrical machines. IEEE, pp 1882–1887. https://doi.org/10.1109/ICElMach.2012.6350138
Slama S (2023) Experimental physics compact for scientists. Springer, Berlin. https://doi.org/10.1007/978-3-662-67895-4
Tong W (2022) Mechanical design and manufacturing of electric motors. CRC Press, Boca Raton. https://doi.org/10.1201/9781003097716
Trauter J, Vialon R (1979) Viskositätsmessung von Schäumen. Melliand Textilberichte, pp 571–574
Wang H, Liu X, Kang M, Guo L, Li X (2022) Oil injection cooling design for the IPMSM applied in electric vehicles. IEEE Trans Transp Electrific 8:3427–3440. https://doi.org/10.1109/TTE.2022.3161064
Acknowledgements
We kindly acknowledge generous support by Deutsche Forschungsgemeinschaft through SFB-Transregio 150 Project Number 237267381-TRR150. We thank Dr.-Ing. J. Emmert for the support during concept development and commissioning. Another thank goes to A.-M. Dzhyhin for the tireless support during torque measurements.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Material preparation, data collection, and analysis were performed by A. Auernhammer and S. Schary. A. Auernhammer wrote the manuscript draft. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests. However, A. Dreizler is an associate editor of Experiments in Fluids, and B. Böhm is a member of the Editorial Advisory Board of Experiments in Fluids. The authors declare they have no financial interests.
Ethical approval
This declaration is not applicable to this study.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Supplementary file1 (AVI 27305 kb)
Supplementary file2 (AVI 57007 kb)
Supplementary file3 (AVI 52052 kb)
Supplementary file4 (AVI 51975 kb)
Supplementary file5 (AVI 59889 kb)
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Auernhammer, A., Schary, S., Dreizler, A. et al. Visualization of the two-phase flow in the air gap of an optically accessible generic electric motor and its effect on torque. Exp Fluids 65, 118 (2024). https://doi.org/10.1007/s00348-024-03855-4
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00348-024-03855-4