
Abstract
An isooctane spray from a high-pressure multihole GDI injector (Bosch HDEV6) was characterised by means of optical extinction tomography, relying on collimated illumination by a focused shadowgraph setup. The tests were carried out in air under ambient conditions at an injection pressure of 300 bar. Spray images were acquired over a 180-degree angular range in 1-degree increments. The critical issues of optical extinction tomography of sprays, related to the strong light extinction by the dense liquid core of fuel jets, were addressed. To mitigate artefacts arising from the reconstruction process, the extinction data were subjected to spatially-variant filtering steps for both raw and post-log data before being analytically inverted through the inverse Radon transform. This approach made it possible to process extinction data at very large optical depths. A nearly complete three-dimensional reconstruction of the spray was obtained, providing significant details of the spray morphology and the internal structure of the jets throughout spray development. Different phases of the atomization process, from the near-field to the far-field regions of the spray, were observed.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Recent decades have seen the development and spread of gasoline direct injection (GDI) engines due to improved fuel efficiency, power output, and reduced emissions (Zhao 2010; Van Basshuysen and Spicher 2009; Kalwar and Agarwal 2020). Their development and advancement, as with diesel, have relied significantly on the optimization of the fuel injection process (Hoffmann et al. 2014; Pauer et al. 2017; Hassdenteufel et al. 2022; Li et al. 2022; Lee et al. 2020), driven by strong synergy between experimental and numerical investigations (Drake and Haworth 2007; Shost et al. 2014; Shahangian et al. 2020; Arienti et al. 2021; Lien et al 2024), in which optical diagnostics played a fundamental role and still does (Drake and Haworth 2007; Zhao 2012; Fansler and Parrish 2014; Linne 2013; Berrocal et al. 2022). In this context, the established high-speed imaging techniques for characterising the macroscopic parameters of sprays, which are based on line-of-sight optical extinction techniques, are increasingly applied in computed tomography investigations (Kristensson et al. 2012; Weiss et al. 2020; Hwang et al. 2020, 2024; Lehnert et al.2022; Oh et al. 2022).
In this field, optical tomography can be considered a viable complement to the use of X-rays, thanks to simpler and more accessible experimental setups. In fact, X-ray diagnostics mainly relies on large synchrotron facilities (Duke et al. 2016, 2017; Sforzo et al. 2022), effectively limiting widespread accessibility. To overcome these limitations, more or less elaborate benchtop sources have also been developed that allow X-ray spray investigations to be performed at more accessible lab-scale facilities (Marchitto et al. 2015; Guénot et al. 2022), although they show some limitations in terms of X-ray spectrum and flux (Kastengren and Powell 2014). In any case, the high penetrating power of X-rays allows otherwise inaccessible areas of the spray to be quantitatively characterised, such as in the near-field region immediately at the injector exit and inside the nozzle. However, to the detriment of its diagnostic potential, experimental constraints restrict the range of operating conditions that can be explored through X-ray absorption methods. Furthermore, the signal-to-noise ratio in dilute regions decreases to unacceptable levels, effectively preventing any investigation of large areas of the spray (Linne 2013; Heindel 2018). Therefore, optical extinction tomography would supplement X-ray diagnostics, thus allowing sprays to be characterised throughout their development.
On the basis of the reference literature on the subject (Natterer 2001; Kak and Slaney 2001), optical extinction tomography of sprays, in the specific case, refers to the cross sectional reconstruction of the extinction coefficient of the liquid phase, starting from a set of line-of-sight extinction data (projections) measured from multiple views in a certain angular range (Kristensson et al. 2012; Weiss et al. 2020; Hwang et al. 2024). The light extinction through the spray is evaluated according the Lambert–Beer law (Bohren and Huffman 2008):
where I0 and I are the incident and transmitted light intensity, respectively, µe(x) is the extinction coefficient of the droplet cloud at position x and τ is the optical depth or thickness measured along the line-of-sight L. The extinction coefficient is a function of the size and number concentration of the spray droplets, and their optical properties can be related to the liquid volume fraction of the spray if droplet sizes and optical properties are known (Bohren and Huffman 2008; Weiss et al. 2020; Hwang et al. 2020). It is worth emphasising that, unlike X-rays, the extinction of light through fuel sprays is mainly due to scattering, absorption being negligible. However, we did not take into account the dependence of the scattering correction on large collection angles (Wind and Szymanki 2002; Deepak and Box 1978a, 1978b), or consider multiple scattering effects whereby the Lambert–Beer law could deviate from linearity at large optical depths (Berrocal et al. 2007; Linne 2013; Lehnert et al. 2022); therefore, in the following, we will always refer to Eq. (1).
The extinction images of the spray were acquired using a focused shadowgraph optical arrangement, taking advantage of an effective image processing method that allows distinguishing between the liquid and vapour phases of a spray in shadowgraph images (Lazzaro 2020). The critical issues of optical extinction tomography are addressed in the paper, mainly related to the strong light extinction by the dense liquid core of fuel jets, which could give rise to serious artefacts in the reconstructed images (Fessler 1993; Mori et al. 2013). The effectiveness of the proposed approach was assessed through visual inspection of the artefact mitigation and edge-preserving characteristics in the reconstructed images. Optical depths are then analytically inverted through the inverse Radon transform, using the filtered back-projection (FBP) algorithm (Kak and Slaney 2001; Natterer 2001), thus obtaining an almost complete 3-D reconstruction of the spray throughout its development. However, it is worth highlighting that the stochastic and transient nature of the injection process requires averaging the optical depths over multiple injections to improve the measurement statistics. Consequently, only statistically steady spray characteristics would be detected.
2 Experimental
An isooctane spray from a high-pressure multihole GDI injector was characterised by means of light extinction tomography, using a focused shadowgraph optical setup. The experimental layout is schematically shown in Fig. 1. An in-line arrangement was made by using two 500 mm focal length and 100 mm diameter plano-convex lenses spaced 2 m apart. The light source is a low-cost high-power blue cw LED (Osram LZ1-10DB00); the output wavelength is centred at 460 nm and the maximum radiant flux is 800 mW. The images were acquired using a high-speed camera, equipped with a 70 mm–f/4.5 objective. A plano-convex lens with a 250 mm focal length in front of the objective facilitates focus adjustment. The images, 512 × 440 pixels in size, were recorded at 40,000 fps with an exposure time of 0.37 µs and a resolution of 0.186 mm/pixel. The optical setup parameters are summarised in Table 1.

Experimental layout. Focal lengths are in mm
The injector is positioned centrally between the collimating and focusing lenses. It rotates around its axis, integral with a small tank of approximately 200 cm3 in volume, driven by a stepper motor via a gear reducer, allowing an angular resolution of 0.1 degrees. The fuel was pressurised via a small gas-driven liquid pump, which can operate up to 880 bar. The investigated injector is the six-hole counterbore GDI injector Bosch HDEV6L used for passenger vehicles (P/N 0261500485). This injector family has been designed for nominal injection pressures up to 350 bar. The upgrade over previous Bosch GDI injectors resulted in higher fuel injection dosing accuracy, improved fuel atomization, reduced jet penetration, and a reduction in nozzle wetting due to improved bore geometry. This translates in a substantial decrease in exhaust emissions, especially in terms of particle number (Pauer et al. 2017; Hassdenteufel et al. 2022; Mamaikin et al. 2022).
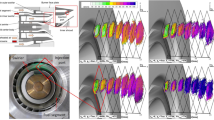
An enlarged view of the injector tip is shown in Fig. 2 on the left, where the holes have been numbered such that even and odd jets are on opposite sides of the symmetry plane of the spray plume. According to the injector specifications, approximately 73% of the total fuel flow rate is equally delivered by jets 1 through 4; while, the remainder is equally distributed between jets 5 and 6; a 3D schematic view of the spray is shown on the right.

Left: injector tip. Right: a schematic picture of the spray pattern
The tests were carried out in air under ambient conditions. The fuel injection pressure was kept at 300 bar and the injector energising time was 800 µs. Looking at it from above, the injector was rotated clockwise, and spray images were acquired over the degree range 0:179 with a 1-degree step. Images from 40 consecutive injections were acquired at each projection angle. The experimental conditions are summarised in Table 2.
3 Methodology and results
3.1 Macroscopic spray characteristics
The macroscopic parameters of the spray were characterised first, i.e. penetration length, projected area, cone angle, and direction. Given the symmetry properties of the HDEV6 injector and the wide structure of the spray plume, the macroscopic parameters of the individual jets were characterised along their projections onto the spray plane of symmetry at the projection angle θ = 0°, where the corresponding symmetrical jets overlap.
3.1.1 Image processing
The spray images were segmented via an effective processing method, which allows the liquid and vapour phases to be simultaneously distinguished in a shadowgraph image. The method has been extensively described elsewhere (Lazzaro and Ianniello 2018; Lazzaro 2019, 2020); therefore, only a brief description is provided here, providing further details in the section dedicated to the tomographic reconstruction of the spray.
Whether the boundaries of the liquid or of the vapour phase are delineated, the common steps of the processing method include optimal filtering of the spray images through regularisation via variational methods and an effective thresholding procedure based on iterative application of Otsu’s method. Furthermore, when segmenting the vapour phase, the intensity texture of the shadowgraph image is first intensified by evaluating the principal curvatures of the spray image surface. As a result, the intensity oscillations due to density gradients are greatly amplified, allowing the boundaries of the vapour phase to be easily outlined.
The raw images are regularised using curvature filters (CF) (Gong and Sbalzarini 2017), which are fast discrete filters for regularizers based on “gaussian curvature”, “mean curvature”, and “total variation” priors. In addition to low computation times and reduced memory requirements, one of their noteworthy features is effective denoising while preserving image edges, which proves invaluable when segmenting the liquid phase (Lazzaro 2020). In fact, due to the different spatial frequencies, curvature filters also effectively smooth the light intensity pattern due to vapour density gradients while fitting well with the intensity profile attributable to the liquid phase. The denoised, regularised images are then processed to obtain the tomographic reconstruction of the liquid phase of the spray.
3.1.2 Macroscopic spray parameters
The macroscopic parameters of individual jets are defined as in Fig. 3, which shows a raw image of the spray acquired at 600 µs after the start of injection (ASOI) and θ = 0°. The black dash-dotted line indicates the injector axis. For comparison, a spray image acquired at θ = 90° is shown in Fig. 4, where individual jets can be distinguished. The liquid and vapour phase boundaries are indicated by blue and red lines, respectively. The cone angle of the jet was measured as the angle between the linear fits of the jet outer edges between 20 and 50% of the jet penetration, and the jet cone bisector defines the angle of the jet axis with respect to the injector axis.

Raw shadowgraph image of the spray acquired at 600 µs ASOI and θ = 0° and definition of jet parameters

Image of the spray at 600 µs ASOI and θ = 90°
Finally, Figs. 5, 6, 7 and 8 show the time evolution of the geometric parameters of the liquid jets measured at θ = 0°, showing a good repeatability of the injection process. The symbols correspond to the average parameter values of 40 consecutive injections, and the error bars indicate the corresponding standard deviations.

Penetration length of the liquid jets

Projected areas of the liquid jets

Cone angles of the liquid jets

Axis angles of the liquid jets
3.2 Computed tomography
3-D images of the spray extinction coefficients were analytically reconstructed through the inverse Radon transform using the filtered back-projection (FBP) algorithm (Kak and Slaney 2001; Natterer 2001). The critical issues of optical extinction tomography of sprays are addressed below, where the sequential steps of the proposed solution approach are detailed.
3.2.1 Step 1. Image restoration
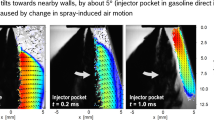
In addition to their intrinsically transient nature, the optical extinction tomography of sprays is limited by severe “photon starvation” due to the strong attenuation of light by the dense liquid core of the jets. In fact, regardless of any consideration relating to noise, signal digitalization nevertheless returns zero values when the incident light intensity is below the camera detection limit. According to the Lambert–Beer law (Eq. 1), the optical depth τ is not defined in this case, and extinction values cannot be calculated at all. This would result in severe “streak artefacts” in the reconstructed image (Fessler 1993; Mori et al. 2013; Hayes et al. 2018; Schofield et al. 2020), regardless of the method adopted to restore the missing values. However, log conversion drawbacks are partially overcome when shadowgraph images are regularised and “cleaned” of fuel vapours, allowing the liquid phase to be defined. This process is illustrated in Fig. 9 with reference to the spray images acquired at 600 µs ASOI at θ = 0° (upper row) and θ = 90° (bottom row). In this case, the relative extent of the photon starvation in the inner core of the jets can be appreciated from Fig. 9(a) and (e), which show the raw images I of the spray before regularisation, where zero values are highlighted in yellow. The images are then regularised by setting the mean curvature prior to the CF code, which assumes that the regularised image defines a minimal surface (Gong and Sbalzarini 2017). To some extent, image regularisation restores or, more properly, replaces missing values of the transmitted light intensity while still returning high-variability data with a very low signal-to-noise ratio. The regularised images Icf are shown in Fig. 9b, f, where residual nonpositive values still persist, which are then inpainted by using the interpolating function inpaint_nans developed in MATLAB by D’Errico (2024), setting interpolation method 2. The resulting images Icf,inp are shown in Fig. 9c, g. The results of the regularisation procedure can be further assessed in Fig. 9d, h, which show the images I-Icf,inp.

Spray images acquired at 600 µs ASOI at θ = 0° (upper row) and θ = 90° (bottom row). a, e: raw images I of the spray before regularisation, where zero values are highlighted in yellow. b, f: regularised images Icf. c, g: “restored” images Icf,inp. d, h: difference images I-Icf,inp
3.2.2 Step 2. Optical depth averaging
Following the above, the optical depth of the spray liquid phase τ is calculated as follows:
where I0,cf is the regularised image of the incident intensity. The optical depths are then averaged over the injection repetitions and converted slice by slice into sinogram data. Figure 10 shows the optical depth profiles for the 40 injection repetitions (thin lines) and their average (thick green lines), measured at 600 µs ASOI along the axial cross Section 30 mm from the injector tip, as indicated by the magenta dash-dotted lines in Fig. 9, and at projection angles θ = 0° (top) and θ = 90° (bottom). It can be seen how the high variability of the restored values is further amplified because of the nonlinear nature of the log conversion (Mori et al. 2013). The sinogram \(\tau \left(\theta ,x\right)\) of averaged optical depths is then shown in Fig. 11.

Optical depth profiles for the 40 injection repetitions (thin lines) and their average (thick green lines), measured at 600 µs ASOI along the axial cross Section 30 mm from the injector tip at the projection angles θ = 0° (top) and θ = 90°(bottom)

Sinogram \(\tau \left(\theta ,x\right)\) at 600 µs ASOI along the axial cross section at 30 mm from the injector tip
However, even though the averaging process improves the measurement statistics, very noisy data are still returned, which significantly affects the image reconstruction process. In fact, when the FBP method is applied, tomographic image reconstruction passes through the well-known ramp or Ram-Lak filter (Kak and Slaney 2001; Zeng 2014), whose adverse effect is to amplify high-frequency measurement noise. Normally, high frequencies are attenuated by apodizing the ramp filter through a window function, whose effect is equivalent to smoothing the projection measurements with a spatially invariant low-pass filter (Fessler 1993; Fessler et al. 2000; La Rivière and Billmire 2005). Additionally, when processing very noisy data, the filter cut-off can be further reduced by compressing (scaling) the frequency range of the window function. However, due to the space-invariant nature of filtering, the larger the frequency compression, the greater the oversmoothing of most of the data. The goal is therefore to optimise the resolution-noise trade-off. Several approaches have been proposed in the literature, which essentially consist of a spatially-variant smoothing of raw or post-log data or in the image domain (Mori et al. 2013; Hayes et al. 2018; O’Sullivan et al. 1993; Hsieh 1998; Fu et al. 2016; Chang et al. 2016; Zeng 2022).
3.2.3 Step 3. Sinogram smoothing
As described above, the individual raw images have already undergone a pre-log filtering phase through their regularisation before the optical depths are calculated and averaged. However, the extent of photon starvation and the transient and stochastic nature of the injection process necessitate additional measures to mitigate artefacts in the reconstructed image. We have followed to some extent the spline-based projection smoothing approach developed by Fessler (1993) and La Rivière and Billmire (2005), which, in our opinion, proved to be suitable for processing optical extinction data from sprays. In their methods, before ramp filtering and back-projection, the projection data undergoes non-stationary smoothing based on an information-weighted smoothing spline, where the weights depend on the measurements themselves. Following their approach, averaged extinction data at each projection angle were pre-filtered by weighted cubic spline interpolation using the MATLAB function csaps. The function is an implementation of the Fortran routine SMOOTH (De Boor and De Boor 1978). The smoothing spline τs,j minimises the following function:
where the first term is the error measure, and the second term is the roughness measure, with n being the number of the data points j. The default value for the error measure weights (wj) is 1. The smoothing parameter p controls the trade-off between the smoothness of the spline and its weighted agreement with the measurements and is analogous to the cut-off frequency in FBP (Fessler 1993).
The smoothing parameter p was instead selected by relying on visual inspection of the reconstructed images, taking as a benchmark the images reconstructed from the unsmoothed data. In this regard, with reference to the sinogram in Fig. 11, the average optical depths at θ = 0° and θ = 90° are shown in Fig. 12, together with the spline-smoothed curves τs for some selected smoothing parameters. In this work, we selected a smoothing parameter of 0.4 to process the sinogram data, regardless of time ASOI and axial plane.

Average optical depth τ at θ = 0° (top) and θ = 90° (bottom) and spline-smoothed curves τs at different smoothing parameters
3.2.4 Step 4. Filtered back-projection
The FBP tomographic reconstruction of the spray extinction coefficient µe was carried out by means of the MATLAB function iradon, which computes the inverse Radon transform of the sinogram data. The Hann window (Chesler and Riederer 1975; Jain 1989; Fessler et al. 2000) with a scaling factor (sf) of 0.5 was used to apodize the ramp filter, while practically the same results were obtained by selecting different apodizing windows in iradon.
Figure 13 shows an explanatory snapshot of the proposed approach, comparing the results of unapodized and apodized FBP reconstructions of the extinction coefficient from unsmoothed and spline-smoothed sinogram data. The reconstructed images of the extinction coefficients are shown in the first column, where streak artefacts can be observed along the directions of maximum light extinction, which progressively blur as the degree of filtering increases. The second column shows the radial profiles of the extinction coefficients along the dashed red lines crossing the jet footprints in the selected axial plane. Finally, to substantiate the above, the last column shows the 2D fast Fourier transform (MATLAB function fft2) of the reconstructed µe images, or more precisely, the absolute value of fft2(µe) where the zero-frequency component has been shifted to the centre of the output (MATLAB function fftshift). Figure 14 summarises the above by comparing the radial profiles of the extinction coefficient for jets 1, 3, and 5 for the set of selected parameters. Qualitatively, the proposed approach provides effective mitigation of streak artefacts while also preserving spray edges. Interestingly, the image reconstruction from spline-smoothed data provides satisfactory results even when applying the unscaled ramp filter.

Unapodized and apodized FBP reconstruction of the extinction coefficient at 30 mm from the injector tip from unsmoothed and spline-smoothed sinogram data. Left: reconstructed images of the extinction coefficients. Middle: radial profiles of the extinction coefficients along the dashed red lines. Right: 2D FFT of the reconstructed µe images

Radial profiles of the extinction coefficient at 30 mm from the injector tip for jets 1, 3, and 5 for the set of selected parameters
3.3 3D tomographic reconstruction
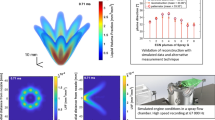
The spline-smoothed sinograms of each axial plane are back-projected to reconstruct the spray slice by slice. Figure 15 shows images of the reconstructed extinction coefficient at different axial planes (middle column) and the related sinograms (left) and radial profiles (right). In the present case, the proposed method largely mitigates the photon starvation issues from the jet core, allowing the spray to be nearly entirely reconstructed. A snapshot of the spray at 600 µs ASOI is then provided in Fig. 16, which shows a 3D view of the extinction coefficients in each axial plane. For clarity, a minimum threshold of 0.6 was applied in plotting the µe data. The magenta lines indicate the axes of the jets, i.e. the lines passing through the centres of the jet footprints, defined following Weiss et al. (2020) as the peak value positions of the extinction coefficient. It can be observed how the spray is characterised by fairly compact and straight jets at this injection time.

Reconstructed images of the extinction coefficient at different axial planes (middle column) and related sinograms (left) and radial profiles along the dashed red lines (right)

3D view of the extinction coefficient of the spray at 600 µs ASOI with a minimum threshold of 0.6 mm.−1
While the main characteristics of the spray structure and individual jets can certainly be deduced from the previous figures, a more engaging and revealing view of the internal structure of the jets is provided by Fig. 17, where isosurfaces of the extinction coefficient between 1 and 5 mm−1 are plotted with step 0.5. The figure clearly highlights the potential of the method, which allows the detection of significant details of the spray morphology and internal structure of the jets throughout the spray development. This is supported by Fig. 18, where the extinction coefficients along the jet axes were plotted as a function of the distance s from the jet origin. By comparing the general trend of the curves, differences are observed between the extinction values of jet 1 and its symmetric jet 2, probably due to small manufacturing discrepancies. Both jets 3–4 and jets 5–6, instead, develop in a similar way to each other, according to the injector specifications previously described.

Isosurfaces of the extinction coefficient of the spray at 600 µs ASOI in the range 1–5 mm−1 with step 0.5

Extinction coefficient values along the jet axes of the spray at 600 µs ASOI
The extinction coefficient profile of jet 1 was analysed in detail, the distinctive features of which appear more marked, as for jet 2, given that they develop roughly orthogonally to the axial planes, thus fully exploiting the spatial resolution. To support the analysis, Fig. 19 shows the front view of jet 1, on whose axis some particular points have been identified and marked with the letters “a” to “h”, as in Fig. 18.

Front view of isosurfaces of the extinction coefficients of jet 1 in the range 1–5 mm−1 with step 0.5
The main characteristics of the atomization process can be easily identified when moving along the jet. According to the literature, the development of a high-pressure liquid jet should occur in two stages (Hiroyasu and Arai 1990; Naber and Siebers 1996; Wu et al. 2021; Dos Santos and Le Moyne 2011; Magnotti and Genzale 2019). In broad terms, the jet initially penetrates almost linearly with time and undergoes strong atomization; thus, the atomization or “breakup region” is defined, where “primary” and “secondary” breakup regions can also be distinguished. Afterwards, the droplets that form are slowed down due to the aerodynamic interactions with the surrounding air, and the subsequent jet penetration follows a square-root trend, thus defining the developed “spray region”. The transition point between the two regimes defines the breakup point of the jet. As expected, the spray from the HDEV6 injector does not appear to deviate from this behaviour, as also highlighted by the penetration curves in Fig. 5. However, it is worth noting that penetration curves refer to the average development of the jets over time; while, Figs. 18 and 19 refer to a snapshot of the average jet at a certain injection time. In this case, the breakup point for jet 1 at 600 µs ASOI can be reasonably located at point “f”, after which the droplet crowding following their slowdown is highlighted by the increase in the extinction coefficient at point “g”. The jet then evolves in the developed spray region, showing its characteristic morphology.
The breakup region obviously extends from inside the injector hole to point “f”. However, optical data from the near-field region of the spray should be interpreted with caution because of time and spatial resolution limitations, the narrow width of the jets, and the compactness of the spray. Primary breakup refers to the abrupt disintegration of a jet into ligaments and droplets in the near-field region at the injector exit (Beale and Reitz 1999; Bravo and Kweon 2014; Grosshans et al. 2015; Zhang et al. 2020; Li et al. 2023). This process proceeds through competing fluid dynamics mechanisms whose relative weight depends on the injector design and experimental conditions, involving inertial, surface tension, viscous, and drag forces (Shinjo and Umemura 2010; Brulatout et al. 2020; Yu et al. 2016; Li et al. 2023; Zeng et al. 2012; Yue et al. 2020). Regardless of the mechanisms involved, however, the net result would be a sudden increase in the number concentration of droplets. This could explain the sharp increase in the extinction coefficient when moving downstream towards point "b". In fact, since light absorption can be neglected, the extinction coefficient varies inversely with the droplet size for the same fuel concentration (Bohren and Huffman 2008). The primary droplets can undergo further atomization in the secondary breakup region, as well as collision and coalescence phenomena. (Jenny et al. 2012; Banerjee and Rutland 2015; Linne 2013; Bravo and Kweon 2014; Berni et al. 2022). This region is characterised by strong droplet-gas fluid dynamic interactions, which promote air–fuel mixing and the onset and growth of turbulent structures in the gas phase (Mitroglou et al. 2007; Ghasemi et al. 2014; Lee and Park 2014; Li et al. 2022). This would translate into the observed trend of the extinction coefficient. First, the overall decrease in µe moving downstream towards point “f” should reflect jet spreading and dilution due to air entrainment; moreover, the establishment of large-scale flow structures can be understood from its oscillating trend. It should be noted that such distinctive details of the extinction coefficient profile do not appear to be blurred by the averaging process, thus suggesting high repeatability of the spray evolution.
The above analysis was then extended to the entire duration of injection, providing further significant details on the atomization characteristics of the HDEV6 injector. In this regard, Fig. 20 shows time sequences of 3D views of the spray throughout the injection. Snapshots of the evolving spray are shown at full-time resolution every 25 µs up to the spray breakup at approximately at 300 µs, after which images are shown every 50 µs up to 500 µs and then every 100 µs. As previously, the development of jet 1 was examined in detail, supported by Figs. 21 and 22, which show the time evolution of the extinction coefficient along the axis of the jet up to the breakup and for the entire duration of the injection, respectively.

3D views of the evolution of the spray throughout the injection duration. Isosurfaces of the extinction coefficient are shown in the range 1–5 mm−1 with step 0.5

Time evolution of the extinction coefficient along the jet 1 axis in the time range 25–300 µs

Time evolution of the extinction coefficient along the jet 1 axis in the time range 25–800 µs
Based on the previous discussion and relying on both spray images and extinction coefficient curves, the onset and development of statistically steady large-scale flow structures in the secondary breakup region can be inferred. Moreover, how the transition point to the developed spray zone can be uniquely identified is remarkable, thus allowing the jet breakup length to be accurately determined, as shown by the black dashed line in Figs. 21 and 22. In this regard, we would like to focus on the striking image of the spray at 300 µs, where the "birth" of the developed spray region for jet 1 and jet 2 can be observed. Furthermore, observing the time evolution of the extinction coefficient after jet breakup, the jet dynamics seems to approach a steady flow condition towards the end of the injection duration, which in this case does not allow definitive conclusions to be drawn; longer injection durations should be investigated.
Interestingly, despite time and spatial resolution limitations, details on the spray evolution during the injector opening transient are also highlighted. In this regard, it can be assumed that the abrupt increase in the extinction coefficient observed at 150 µs results from the steep increase in the fuel injection rate (Mohan et al. 2018; Payri et al. 2016), whereby later and faster injected fuel should build up along the jet. Furthermore, the extent of this increase should also depend on the injection rate overshoot of this type of injector (Duke et al. 2017; Shahangian et al. 2020; Baldwin et al. 2016; Payri et al. 2022; Mamaikin et al. 2022). Moreover, the onset of turbulent flow structures, which should define the transition between the primary and secondary breakup zones, can be inferred in Fig. 20 by observing the swelling and twisting of the jet heads in the images between 125 µs and 200 µs.
4 Summary and concluding remarks
This article reports the results of an optical extinction tomography investigation of a high-pressure GDI spray from a multihole injector. The critical issues of "photon starvation” by the dense liquid core of fuel jets have been addressed by proposing a simple pre-processing method of extinction data before analytical inversion through the inverse Radon transform.
The method, developed in a MATLAB environment, is essentially based on spatially variant and edge-preserving filtering of raw and post-log extinction data. This approach made it possible to recover and analyse very large optical depths, allowing an almost complete three-dimensional reconstruction of the spray and providing significant details on its morphology and the internal structure of the jets. The different phases of the atomization process were observed from the near-field to the far-field regions of the spray. The jet breakup length was easily and uniquely detected, as was the inception and growth of the developed spray region. The onset and development of statistically steady large-scale flow structures in the region of secondary atomization were also inferred.
To the best of our knowledge, this is the first in-depth characterisation of very dense sprays through optical extinction tomography. In our opinion, the method represents a significant step forward in this field, although it would need to be tested in more severe environments and with different spray patterns to ensure its broad applicability.
Data availability
Not applicable.
References
Arienti M, Wenzel EA, Sforzo BA, Powell CF (2021) Effects of detailed geometry and real fluid thermodynamics on spray G atomization. Proc Combust Inst 38(2):3277–3285. https://doi.org/10.1016/j.proci.2020.06.039
Baldwin ET, Grover RO Jr, Parrish SE, Duke DJ, Matusik KE, Powell CF, Schmidt DP (2016) String flash-boiling in gasoline direct injection simulations with transient needle motion. Int. J. Multiph. Flow 87:90–101. https://doi.org/10.1016/j.ijmultiphaseflow.2016.09.004
Banerjee S, Rutland CJ (2015) Study on spray induced turbulence using large eddy simulations. At. Sprays 25(4):285. https://doi.org/10.1615/AtomizSpr.2015006910
Beale JC, Reitz RD (1999) Modeling spray atomization with the Kelvin-Helmholtz/Rayleigh-Taylor hybrid model. At Sprays 9(6):623. https://doi.org/10.1615/AtomizSpr.v9.i6.40
Berni F, Sparacino S, Riccardi M, Cavicchi A, Postrioti L, Borghi M, Fontanesi S (2022) A zonal secondary break-up model for 3D-CFD simulations of GDI sprays. Fuel 309:122064. https://doi.org/10.1016/j.fuel.2021.122064Get
Berrocal E, Sedarsky DL, Paciaroni ME, Meglinski IV, Linne MA (2007) Laser light scattering in turbid media Part I: experimental and simulated results for the spatial intensity distribution. Opt Express 15(17):10649–10665. https://doi.org/10.1364/OE.15.010649
Berrocal E, Paciaroni M, Chen Mazumdar Y, Andersson M, Falgout Z, Linne M (2022) Optical spray imaging diagnostics. optical diagnostics for reacting and non-reacting flows: theory and practice. American Institute of Aeronautics and Astronautics Inc, Reston, VA, pp 777–930. https://doi.org/10.2514/5.9781624106330.0000.0000
Bohren CF, Huffman DR (2008) Absorption and scattering of light by small particles. John Wiley & Sons. https://doi.org/10.1002/9783527618156
Bravo L, Kweon CB (2014) A review on liquid spray models for diesel engine computational analysis. Army research laboratory technical report series, ARL-TR-6932
Brulatout J, Garnier F, Seers P (2020) Interaction between a diesel-fuel spray and entrained air with single-and double-injection strategies using large eddy simulations. Propuls Power Res 9(1):37–50. https://doi.org/10.1016/j.jppr.2019.12.001
Chang Z, Zhang R, Thibault JB, Pal D, Fu L, Sauer K, Bouman C (2016) Modeling and pre-treatment of photon-starved CT data for iterative reconstruction. IEEE Trans Med Imaging 36(1):277–287. https://doi.org/10.1109/TMI.2016.2606338
Chesler DA, Riederer SJ (1975) Ripple suppression during reconstruction in transverse tomography. Phys Med Biol 20(4):632. https://doi.org/10.1088/0031-9155/20/4/011
D’Errico J (2024) Inpaint_nans (https://www.mathworks.com/matlabcentral/fileexchange/4551-inpaint_nans), MATLAB central file exchange. Retrieved February 4, 2024
De Boor C, De Boor C (1978) A practical guide to splines. Springer-Verlag, New York
Deepak A, Box MA (1978) Forwardscattering corrections for optical extinction measurements in aerosol media 1: monodispersions. Appl. Opt. 17(18):2900–2908. https://doi.org/10.1364/AO.17.002900
Deepak A, Box MA (1978) Forwardscattering corrections for optical extinction measurements in aerosol media 2: polydispersions. Appl. Opt. 17(19):3169–3176. https://doi.org/10.1364/AO.17.003169
Dos Santos F, Le Moyne L (2011) Spray atomization models in engine applications, from correlations to direct numerical simulations. Oil & Gas Science and Technology-Revue d’IFP Energies Nouvelles 66(5):801–822. https://doi.org/10.2516/ogst/2011116
Drake MC, Haworth DC (2007) Advanced gasoline engine development using optical diagnostics and numerical modeling. Proc Combust Inst 31(1):99–124. https://doi.org/10.1016/j.proci.2006.08.120
Duke DJ, Swantek AB, Sovis NM, Tilocco FZ, Powell CF, Kastengren AL, Gürsoy D, Biçer T (2016) Time-resolved x-ray tomography of gasoline direct injection sprays. SAE Int. J. Engines 9(1):143–153
Duke DJ, Kastengren AL, Matusik KE, Swantek AB, Powell CF, Payri R, Vaquerizo D, Itani L, Bruneaux G, Grover RO, Parrish S, Markle L, Schmidt D, Manin J, Skeen SA, Pickett LM (2017) Internal and near nozzle measurements of engine combustion network “spray G” gasoline direct injectors. Exp Therm Fluid Sci 88:608–621. https://doi.org/10.1016/j.expthermflusci.2017.07.015
Fansler TD, Parrish SE (2014) Spray measurement technology: a review. Meas Sci Technol 26(1):012002. https://doi.org/10.1088/0957-0233/26/1/012002
Fessler JA (1993) Tomographic reconstruction using information-weighted spline smoothing. In: Barrett HH, Gmitro AF (eds) Information processing in medical imaging IPMI 1993 lecture notes in computer science, vol 687. Springer, Berlin Heidelberg
Fessler JA, Sonka M, Fitzpatrick JM (2000) Statistical image reconstruction methods for transmission tomography. Handbook of Medical Imaging 2:1–70. https://doi.org/10.1117/3.831079.ch1
Fu L, Lee TC, Kim SM, Alessio AM, Kinahan PE, Chang Z, Sauer K, Kalr MK, De Man B (2016) Comparison between pre-log and post-log statistical models in ultra-low-dose CT reconstruction. IEEE Trans Med Imaging 36(3):707–720. https://doi.org/10.1109/TMI.2016.2627004
Ghasemi A, Barron RM, Balachandar R (2014) Spray-induced air motion in single and twin ultra-high injection diesel sprays. Fuel 121:284–297. https://doi.org/10.1016/j.fuel.2013.12.041
Gong Y, Sbalzarini IF (2017) Curvature filters efficiently reduce certain variational energies. IEEE Trans Image Process 26(4):1786–1798. https://doi.org/10.1109/TIP.2017.2658954
Grosshans H, Kristensson E, Szász RZ, Berrocal E (2015) Prediction and measurement of the local extinction coefficient in sprays for 3D simulation / experiment data comparison. Int J Multiph Flow 72:218–232. https://doi.org/10.1016/j.ijmultiphaseflow.2015.01.009
Guénot D, Svendsen K, Lehnert B, Ulrich H, Persson A, Permogorov A, Zigan L, Wensing M, Lundh O, Berrocal E (2022) Distribution of liquid mass in transient sprays measured using laser-plasma-driven x-ray tomography. Phys Rev Appl 17(6):064056. https://doi.org/10.1103/PhysRevApplied.17.064056
Hassdenteufel A, Schünemann E, Neubert V, Hirchenhein A (2022) Gasoline powertrain solutions with ultra low tailpipe emissions. Transp Eng 8:100109. https://doi.org/10.1016/j.treng.2022.100109
Hayes JW, Gomez-Cardona D, Zhang R, Li K, Cruz-Bastida JP, Chen GH (2018) Low-dose cone-beam CT via raw counts domain low-signal correction schemes: performance assessment and task-based parameter optimization (Part I: assessment of spatial resolution and noise performance). Med Phys 45(5):1942–1956. https://doi.org/10.1002/mp.12856
Heindel TJ (2018) X-ray imaging techniques to quantify spray characteristics in the near field. At. Sprays 28(11):1059. https://doi.org/10.1615/AtomizSpr.2019028797
Hiroyasu H, Arai M (1990) Structures of fuel sprays in diesel engines. SAE Transactions. https://doi.org/10.4271/900475
Hoffmann G, Befrui B, Berndorfer A, Piock W et al (2014) Fuel system pressure increase for enhanced performance of GDi multi-hole injection systems. SAE Int. J. Engines 7(1):519
Hsieh J (1998) Adaptive streak artifact reduction in computed tomography resulting from excessive x-ray photon noise. Med Phys 25(11):2139–2147. https://doi.org/10.1118/1.598410
Hwang J, Weiss L, Karathanassis IK, Koukouvinis P, Pickett LM, Skeen SA (2020) Spatio-temporal identification of plume dynamics by 3D computed tomography using engine combustion network spray G injector and various fuels. Fuel 280:118359. https://doi.org/10.1016/j.fuel.2020.118359
Hwang J, Karathanassis IK, Koukouvinis P, Nguyen T, Tagliante F, Pickett LM, Sforzo B, Powell CF (2024) Spray process of multi-component gasoline surrogate fuel under ECN spray G conditions. Int J Multiph Flow. https://doi.org/10.1016/j.ijmultiphaseflow.2024.104753
Jain AK (1989) Fundamentals of digital image processing Computer Vision. Graphics Image Process. https://doi.org/10.1016/0734-189X(89)90041-8
Jenny P, Roekaerts D, Beishuizen N (2012) Modeling of turbulent dilute spray combustion. Prog Energy Combust Sci 38(6):846–887. https://doi.org/10.1016/j.pecs.2012.07.001
Kak AC, Slaney M (2001) Principles of computerized tomographic imaging. Soci for Ind Appl Math. https://doi.org/10.1137/1.9780898719277
Kalwar A, Agarwal AK (2020) Overview, advancements and challenges in gasoline direct injection engine technology. Adv Combust Tech Engine Technol Automot Sect. https://doi.org/10.1007/978-981-15-0368-9_6
Kastengren A, Powell CF (2014) Synchrotron X-ray techniques for fluid dynamics. Exp Fluids 55:1–15. https://doi.org/10.1007/s00348-014-1686-8
Kristensson E, Berrocal E, Aldén M (2012) Quantitative 3D imaging of scattering media using structured illumination and computed tomography. Opt Express 20(13):14437–14450. https://doi.org/10.1364/OE.20.014437
La Rivière PJ, Billmire DM (2005) Reduction of noise-induced streak artifacts in X-ray computed tomography through spline-based penalized-likelihood sinogram smoothing. IEEE Trans Med Imaging 24(1):105–111. https://doi.org/10.1109/tmi.2004.838324
Lazzaro M (2019) Characterization of the liquid phase of vaporizing GDI sprays from Schlieren imaging. Meas Sci Technol 30(8):085401. https://doi.org/10.1088/1361-.6501/ab228d
Lazzaro M, Ianniello R (2018) Image processing of vaporizing GDI sprays: a new curvature-based approach. Meas Sci Technol 29(1):015402. https://doi.org/10.1088/1361-6501/aa9301
Lazzaro M (2020) High-Speed Imaging of a Vaporizing GDI spray: a Comparison between Schlieren, Shadowgraph, DBI and Scattering. SAE Tech Pap (2020-01-0326) https://doi.org/10.4271/2020-01-0326
Lee S, Park S (2014) Experimental study on spray break-up and atomization processes from GDI injector using high injection pressure up to 30 MPa. Int J Heat Fluid Flow 45:14–22. https://doi.org/10.1016/j.ijheatfluidflow.2013.11.005
Lee Z, Kim T, Park S, Park S (2020) Review on spray, combustion, and emission characteristics of recent developed direct-injection spark ignition (DISI) engine system with multi-hole type injector. Fuel 259:116209. https://doi.org/10.1016/j.fuel.2019.116209
Lehnert B, Weiss L, Berrocal E, Wensing M (2022) Tomographic reconstruction of spray evolution considering multiple light scattering effects In the proceedings of the international symposium on diagnostics and modeling of combustion in internal combustion engines. Japan Soc Mechanical Eng. https://doi.org/10.1299/jmsesdm.2022.10.C5-1
Li X, Li D, Liu J, Ajmal T, Aitouche A, Mobasheri R, Mobasheri R, Rybdylova O, Pei Y, Peng Z (2022) Comparative study on the macroscopic characteristics of gasoline and ethanol spray from a GDI injector under injection pressures of 10 and 60 MPa. ACS Omega 7(10):8864–8873. https://doi.org/10.1021/acsomega.1c07188
Li Y, Ries F, Sun Y, Lien HP, Nishad K, Sadiki A (2023) Direct numerical simulation of atomization characteristics of ECN Spray-G injector: in-nozzle fluid flow and breakup processes. Flow Turbul Combust. https://doi.org/10.1007/s10494-023-00514-2
Lien HP, Li Y, Pati A, Sadiki A, Hasse C (2024) Numerical studies of gasoline direct-injection sprays (ECN Spray G) under early-and late-injection conditions using large eddy simulation and droplets-statistics-based Eulerian-Lagrangian framework. Fuel 357:129708. https://doi.org/10.1016/j.fuel.2023.129708
Linne M (2013) Imaging in the optically dense regions of a spray: a review of developing techniques. Prog Energy Combust Sci 39(5):403–440. https://doi.org/10.1016/j.pecs.2013.06.001
Magnotti GM, Genzale CL (2019) Recent progress in primary atomization model development for diesel engine simulations. In: Saha K, Kumar Agarwal A, Ghosh K, Som S (eds) Two-phase flow for automotive and power generation sectors energy, environment, and sustainability. Springer, Singapore
Mamaikin D, Knorsch T, Rogler P, Wang J, Wensing M (2022) The effect of transient needle lift on the internal flow and near-nozzle spray characteristics for modern GDI systems investigated by high-speed X-ray imaging. Int J Engine Res 23(2):300–318. https://doi.org/10.1177/1468087420986751
Marchitto L, Hampai D, Dabagov SB, Allocca L, Alfuso S, Polese CLAUDIA, Liedl A (2015) GDI spray structure analysis by polycapillary X-ray μ-tomography. Int J Multiph Flow 70:15–21. https://doi.org/10.1016/j.ijmultiphaseflow.2014.11.015
Mitroglou N, Nouri JM, Yan Y, Gavaises M, Arcoumanis C (2007) Spray structure generated by multi-hole injectors for gasoline direct-injection engines SAE Tech. Pap. https://doi.org/10.4271/2007-01-1417
Mohan B, Du J, Sim J, Roberts WL (2018) Hydraulic characterization of high-pressure gasoline multi-hole injector. Flow Meas Instrum 64:133–141. https://doi.org/10.1016/j.flowmeasinst.2018.10.017
Mori I, Machida Y, Osanai M, Iinuma K (2013) Photon starvation artifacts of X-ray CT: their true cause and a solution. Radiol Phys Technol 6(1):130–141. https://doi.org/10.1007/s12194-012-0179-9
Naber JD, Siebers DL (1996) Effects of gas density and vaporization on penetration and dispersion of diesel sprays. SAE Trans 105:82–111
Natterer F (2001) The mathematics of computerized tomography. Soc Ind Appl Math. https://doi.org/10.1137/1.9780898719284
O’Sullivan F, Pawitan Y, Haynor D (1993) Reducing negativity artifacts in emission tomography: post-processing filtered backprojection solutions. IEEE Trans Med Imaging 12(4):653–663. https://doi.org/10.1109/42.251115
Oh H, Hwang J, White L, Pickett LM, Han D (2022) Spray collapse characteristics of practical GDI spray for lateral-mounted GDI engines. Int J Heat Mass Tran 190:122743. https://doi.org/10.1016/j.ijheatmasstransfer.2022.122743
Pauer T, Yilmaz H, Zumbrägel J, Schünemann E (2017) New generation Bosch gasoline direct-injection systems. MTZ Worldwide 78(7):16–23. https://doi.org/10.1007/s38313-017-0053-6
Payri R, Gimeno J, Martí-Aldaraví P, Vaquerizo D (2016) Internal flow characterization on an ECN GDi injector. At. Sprays 26(9):889. https://doi.org/10.1615/AtomizSpr.2015013930
Payri R, Gimeno J, Marti-Aldaravi P, Martinez M (2022) Transient nozzle flow analysis and near field characterization of gasoline direct fuel injector using large Eddy simulation. Int J Multiph Flow 148:103920. https://doi.org/10.1016/j.ijmultiphaseflow.2021.103920
Schofield R, King L, Tayal U, Castellano I, Stirrup J, Pontana F, Nicol E (2020) Image reconstruction: Part 1–understanding filtered back projection, noise and image acquisition. J. Cardiovasc. Comput. Tomogr. 14(3):219–225. https://doi.org/10.1016/j.jcct.2019.04.008
Sforzo BA, Tekawade A, Kastengren AL, Fezzaa K, Ilavsky J, Powell CF, Levy R (2022) X-ray characterization of real fuel sprays for gasoline direct injection. J. Energy Res. Technol. 144(2):022303. https://doi.org/10.1115/1.4050979
Shahangian N, Sharifian L, Uehara K, Noguchi Y, Martínez M, Martí-Aldaraví P, Payri R (2020) Transient nozzle flow simulations of gasoline direct fuel injectors. Appl Therm Eng 175:115356. https://doi.org/10.1016/j.applthermaleng.2020.115356
Shinjo J, Umemura A (2010) Simulation of liquid jet primary breakup: dynamics of ligament and droplet formation. Int J Multiph Flow 36(7):513–532. https://doi.org/10.1016/j.ijmultiphaseflow.2010.03.008
Shost MA, Lai MC, Befrui B, Spiekermann P, Varble DL (2014) GDi nozzle parameter studies using LES and spray imaging methods. SAE Tech Pap. https://doi.org/10.4271/2014-01-1434
Van Basshuysen R, Spicher U (2009) Gasoline engine with direct injection: processes, systems, development, potential. Vieweg+ Teubner, Berlin
Weiss L, Wensing M, Hwang J, Pickett LM, Skeen SA (2020) Development of limited-view tomography for measurement of Spray G plume direction and liquid volume fraction. Exp Fluids 61:1–17. https://doi.org/10.1007/s00348-020-2885-0
Wind L, Szymanski WW (2002) Quantification of scattering corrections to the Beer-Lambert law for transmittance measurements in turbid media. Meas Sci Techn 13(3):270. https://doi.org/10.1088/0957-0233/13/3/306
Wu S, Meinhart M, Petersen B, Yi J, Wooldridge M (2021) Breakup characteristics of high speed liquid jets from a single-hole injector. Fuel 289:119784. https://doi.org/10.1016/j.fuel.2020.119784
Yu Y, Li G, Wang Y, Ding J (2016) Modeling the atomization of high-pressure fuel spray by using a new breakup model. App Math Model 40(1):268–283. https://doi.org/10.1016/j.apm.2015.04.046
Yue Z, Battistoni M, Som S (2020) Spray characterization for engine combustion network Spray G injector using high-fidelity simulation with detailed injector geometry. Int J Engine Res 21(1):226–238. https://doi.org/10.1177/1468087419872398
Zeng GL (2022) Photon starvation artifact reduction by shift-variant processing. IEEE Access 10:13633–13649. https://doi.org/10.1109/access.2022.3142775
Zeng W, Xu M, Zhang M, Zhang Y, Cleary DJ (2012) Macroscopic characteristics for direct-injection multi-hole sprays using dimensionless analysis. Exp Therm Fluid Sci 40:81–92. https://doi.org/10.1016/j.expthermflusci.2012.02.003
Zeng GL (2014) Revisit of the ramp filter. In 2014 IEEE Nuclear Science Symposium and Medical Imaging Conference (NSS/MIC) IEEE, 1–6 https://doi.org/10.1109/TNS.2014.2363776
Zhang B, Popinet S, Ling Y (2020) Modeling and detailed numerical simulation of the primary breakup of a gasoline surrogate jet under non-evaporative operating conditions. Int J Multiph Flow 130:103362. https://doi.org/10.1016/j.ijmultiphaseflow.2020.103362
Zhao H (Ed.) (2010) Advanced direct injection combustion engine technologies and development: gasoline and gas engines, Vol. 1. Woodhead Publishing Limited and CRC Press LLC
Zhao H (Ed.) (2012) Laser diagnostics and optical measurement techniques in internal combustion engines SAE Int https://doi.org/10.4271/R-406
Funding
Open access funding provided by Consiglio Nazionale Delle Ricerche (CNR) within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Contributions
M.L., S.A. ad R.I. accomplished conceptualization, methodology, investigation, data curation, writing, and original draft preparation.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Ethical approval
Not applicable.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

{kind=link}
Cite this article
Lazzaro, M., Alfuso, S. & Ianniello, R. Shadowgraph tomography of a high-pressure GDI spray. Exp Fluids 65, 110 (2024). https://doi.org/10.1007/s00348-024-03850-9
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00348-024-03850-9