
Abstract
Single-component molecular tagging velocimetry (1c-MTV) experiments are conducted in an oscillating grid turbulence facility to systematically clarify the trade-offs between maximizing measurement dynamic range and minimizing measurement uncertainty. The primary aim is to obtain reliable turbulence data with the maximum possible vector resolution (\(\varDelta {x}_{1}\)). Four optical magnifications (\(M{_{0}}\) =0.11, 0.22, 0.45, 1.11) with four interframe time delay (\(\varDelta {t}\)) values, for each optical magnification case, ranging from 3 to 10 ms, are investigated. The grid oscillates with a frequency (f) of 3.2 and 4.1 Hz, and a single fixed stroke length (S) of 55 mm. The measurement quality is quantified using three important turbulence descriptors — the second-order transverse velocity correlation function \((\langle {g(r)}\rangle )\), the second-order transverse velocity structure function \(([\Delta {_{g}u}]^2)\), and the turbulence energy dissipation rate (\(\langle \epsilon \rangle\)). Other descriptors such as the longitudinal integral length scale (l) and the longitudinal Taylor microscale (\({\lambda }\)) are also used to compare with reference values reported in literature. The degree of agreement with the reference values from literature, and insensitivity of the descriptor estimates to different MTV design parameters are used to determine the most robust means of obtaining high-resolution turbulence data from 1c-MTV. The experimental design parameters are contextualized using the Kolmogorov length (\({\eta }\)), time (\({\tau _{\eta }}\)), and velocity (\({u_{\eta }}\)) scales that are based on the most reliable \(\langle {\epsilon }\rangle\) estimates from the current experiments. The pixel-displacement corresponding to \({u_{\eta }}\) \(({\varDelta {x}{_{2}}{_{\eta }}})\) describes the interdependencies between \({M_{0}}\) and \(\varDelta {t}\). The data set with \({M_{0}}=0.45\) (\({\eta =}18{\varDelta {x}_{1}}\) for f=3.2 Hz, and \({\eta =}13{\varDelta {x}_{1}}\) for f=4.1 Hz) represents the most reliable and the highest resolution case. This conclusion was deduced by taking the performance of all the turbulence descriptors into account. As far as the interframe time delay is concerned, \(\varDelta {t} \ge\) 4 ms (\({\varDelta {x}{_{2}}{_{\eta }}}\ge 0.5 \text {pixels}\)) works well for all \({{M}_{0}}\). To the authors’ knowledge, the present study documents the first instance of a series of 1c-MTV experiments conducted for a systematic clarification of the nature of balancing the available dynamic range and the measurement uncertainty. Additionally, since the study involves turbulent flow with negligible mean-flow, it serves as an adequate representation of 1c-MTV performance in a three-dimensional flow.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The immanent multi-scale nature of turbulence has placed significant demands on experimental techniques in fluid mechanics. For techniques intending to provide reliable turbulence measurements, it is desired to adequately capture and record motions across the existent range of scales. This also entails substantial effort in ensuring that the desired range of measured time and length scales of the turbulence, can be afforded by the technique. Since the mid-20\(^{th}\) century, turbulence research has been significantly colored by the ideas of universality of small-scale turbulence and local isotropy as proposed by Kolmogorov (1941). While hot-wire anemometry has been the principal tool employed in experimentally studying these ideas, a surge in the advancement of laser diagnostic approaches has allowed for non-invasive, simultaneous multi-point flow measurements.
One such technique is molecular tagging velocimetry (MTV) which can be viewed as a ‘molecular-cousin’ of particle image velocimetry (PIV) (Koochesfahani and Nocera 2007). In this technique, molecular tracers are homogeneously mixed in the working fluid. Upon photoexcitation, the tracers are raised to a metastable state followed by a subsequent return to the ground state. After excitation, the tracers emit short-lifetime fluorescence followed by a moderate-lifetime phosphorescence. The emitted phosphorescent signal is used to measure the flow velocity by estimating the Lagrangian displacements of the tracers using two images recorded by the imaging system, typically a camera. The time delay between the images is an important consideration of experimental design. The single-component version of this technique, 1c-MTV, involves tagging tracers along a line and then estimating the velocity component transverse to the tag-line. In contrast to PIV, in MTV, continuous tagged regions are imaged and tracked. This results in the spatial resolution of the technique nominally matching the actual resolution of the imaging system. This feature makes it an attractive choice for measuring quantities that involve spatial derivatives. Other advantages of MTV include its minimal invasiveness and the absence of difficulties associated with PIV, such as inadequate particle seeding density and the density discrepancies between the working fluid and the particle (Koochesfahani and Nocera 2007).
Owing to its one-dimensional nature, 1c-MTV suffers from accuracy or bias error that stems from motion tangential to the tag-line. This error is generally most important in three-dimensional flows. From an experimental design perspective, these errors can be minimized by lowering the interframe time delay ((\(\varDelta {t}\))) (Hill and Klewicki 1996). Decreasing (\(\varDelta {t}\)) must, however, be carefully balanced against ensuring sufficient pixel displacement normal to the tag-line for accurate measurements, i.e. maximizing the precision. This represents a fundamental trade-off of 1c-MTV. Here, the measurement dynamic range must be adjusted to minimize the likelihood of bias error (Hammer et al. 2013). This trade-off warrants attention as it directly influences the high-resolution capability of 1c-MTV. That is, the displacement data available along the tag-line is only useful if it is measured accurately and is of sufficient dynamic range.
1.1 Present objectives
The objective of this study is to systematically clarify how to best maximize measurement dynamic range and simultaneously minimize measurement uncertainty in 1c-MTV measurements. Toward this aim, 1c-MTV experiments of oscillating grid turbulence (OGT) were conducted for four optical magnifications (\(M_0=0.11, 0.22, 0.45, 1.11\)) with four (\(\varDelta {t}\)) values ranging from 3 ms to 10 ms for each optical magnification case. To realize a three-dimensional flow, an OGT flow facility was chosen owing to the negligible mean-flow created in such facilities (de Silva and Fernando 1994). The measurement quality is quantitatively examined through three important turbulence descriptors — the second-order transverse velocity correlation function (g(r)), the second-order transverse velocity structure function (\([\Delta _g u]^2\)), and the turbulence energy dissipation rate (\(\langle \epsilon \rangle\)). Other descriptors such as the longitudinal integral length scale (l) and the longitudinal Taylor microscale (\(\lambda\)) are used to compare with reference values reported in the literature. The degree of agreement with the reference values from the literature, and insensitivity of the descriptor estimates to different MTV design parameters are used to determine the most robust way to obtain high-resolution turbulence data from 1c-MTV.
2 Methods
2.1 Experimental facility
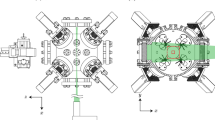
The experimental facility consisted of an oscillating grid, the associated drive and a concentric square tank. The mesh size (M) and the bar size (d) of the grid were 50 mm and 10 mm, respectively. The purpose of the drive was to obtain linear motion of the grid from the rotary input of a pulley, driven by a motor equipped with a potentiometer-based speed controller. The concentric square tank design and all the associated dimensions were based on the setup reported in McCorquodale and Munro (2018), with the aim of minimising the strength of the mean flow. The coordinate system is established from the mean position of the grid. Figure 1 presents a schematic of the OGT-MTV experiments. The grid oscillates in the \(x_3\) direction with a frequency (f) of 3.2 Hz and 4.1 Hz, and a single fixed stroke length (S) of 55 mm. The choice of grid-oscillation parameters was guided by previous studies (McDougall 1979; Hopfinger and Toly 1976; de Silva and Fernando 1994; McCorquodale and Munro 2018), with primary aims of creating homogeneous turbulence while minimizing the mean-flow.

Schematic showing the key components of OGT-MTV experiment
2.2 MTV system design and data reduction
The tank was filled with the molecular-tagging chemical solution, otherwise known as the tracer solution, which consists of a triplex of 1-bromonapthalene (\(1 \times 10^{-5}\) M), methyl-\(\beta\)-cyclodextrin (\(2 \times 10^{-4}\) M) and cyclohexanol (\(5 \times 10^{-2}\) M), mixed homogeneously with filtered tap water. 1-Bromonapthalene is the lumophore that provides the required phosphorescence. Methyl-\(\beta\)-cyclodextrin serves to make the lumophore soluble in water by providing a cup-shaped molecular structure with the lumophore enclosed in the same. The amount of methyl-\(\beta\)-cyclodextrin can be varied to strike a balance between phosphorescent intensity and laser beam attenuation. Higher the concentration of methyl-\(\beta\)-cyclodextrin, higher is the phosphorescent intensity and the laser beam attenuation, and vice-versa. The role of the alcohol is to mitigate the problems of quenching by the constituents of the fluid, in this case the oxygen in the water molecules, by providing a ‘chemical lid’ to the cup-shaped structure. The tracer solution was prepared outside the tank and was then poured into the tank to the required level. An excess of 1-bromonapthalene was maintained in the tank. This ensures sufficient compensation for any possible photo-bleaching, which would be mixed with the rest of the solution through the oscillating grid turbulence.
The laser beam from the exit aperture of a 308-nm excimer laser (Coherent Inc. COMPex 110) was directed by fully-reflecting mirrors to pass through a 0.5-mm pinhole and subsequently into the tank at the required location. The physical line-thickness was equal to the pinhole-diameter which was 0.5 mm. The measurement line of interest was positioned at 135 mm from the mean-position of the grid, i.e. \(x_3=135\) mm, and was oriented along the \(x_1-\)direction. The rationale behind the choice of measurement line location was to maximize the pixel displacements by staying close to the grid while also ensuring that \(x_3\ge 2.5M\), to realize well-developed oscillating grid turbulence (Hopfinger and Toly 1976). The optical magnification (\(M_0\)) was varied by using camera lens arrangements of different focal lengths. The relevant details, along with the actual achievable resolution (reported in line-pairs per millimetre) and the corresponding obtained vector resolution (\(\Delta x_1\)), are given in Table 1. The context for the MTV design parameters, such as resolution, exposure and delay time periods, in relation to flow-based time and length scales is provided in section 4.
Images were obtained at a sampling frequency of 5 Hz by a 1304 (vertical) \(\times\) 1504 (horizontal) pixel pco.dicam C1 intensified-sCMOS camera with pixel dimensions of 6.5 \(\mu\)m \(\times\) 6.5 \(\mu\)m. The sampling period for each independent run was 360 s and 4 such runs were conducted for each experimental variation of \(M_0\) and f to ensure statistical independence and convergence. The imaged line-thickness, calculated as full width at half maximum (FWHM), was 7, 14, 28 and 69 pixels, for \(M_0=0.11, 0.22, 0.45\) and 1.11, respectively. Velocity measurements were obtained from the images by applying a FFT-based cross-correlation between the undeformed and the deformed tag-line pair, at each pixel location along the tag-line. The location of the correlation maxima gives the tracer displacement with integer accuracy. A 5-point, second-order polynomial was fit and differentiated around the neighbourhood of the correlation maxima (with integer accuracy) to determine the sub-pixel contribution to the overall tracer displacement. This yields a sub-pixel resolution of about 0.3 pixels (\(95\%\) confidence) (Elsnab et al. 2017). The calibration for obtaining displacements in physical units from pixel units was performed by imaging a target consisting of uniformly positioned dots (circles) with a known spacing. This is the same standard procedure adopted in two-component, planar particle image velocimetry calibration, e.g. (Soloff et al. 1997).
The exposure time periods for the undeformed and deformed image, \(t_{\text {exp},1}\) and \(t_{\text {exp},2}\) respectively, were chosen in a manner that maximizes the image signal-to-noise ratio. This requires setting \(t_{\text {exp},2}\) to be larger than \(t_{\text {exp},1}\) to compensate for the phosphorescent intensity decay with increasing delay time period for the deformed image, \(t_{\text {delay},2}\). Multiple values of \(t_{\text {delay},2}\) were employed for a given \(M_0\) to determine the optimal \(t_{\text {delay},2}\). The optimal \(t_{\text {delay},2}\) is one that gives the best attainable dynamic velocity range (DVR), while at the same time, generating only small systematic errors which originate from the component of flow velocity parallel to the tag-line (Hill and Klewicki 1996). The delay time period for the undeformed image, \(t_{\text {delay},1}\), was set at 5 \(\mu s\) after emission for all of the measurements. This avoids imaging the short-lived fluorescence emitted by the tracers immediately subsequent to laser excitation. Since \(t_{\text {exp},2} \ge t_{\text {exp},1}\), the interframe time delay (\(\varDelta {t}\)) used for estimating velocity from tracer displacement is defined as the time elapsed between the mid-exposure time-instants of the undeformed and deformed images to account for motion during the exposure time periods, and is given by
An ad hoc estimate of the measurement uncertainty, \(\delta x_2\), was generated by obtaining a series of MTV images of the tracer solution at rest in the tank under the same imaging conditions as in the flow experiments. Table 2 gives the timing and measurement uncertainty details for all the imaging conditions adopted. The measurement uncertainty is calculated as the root-mean-square of tracer displacements obtained from MTV of the fluid at rest. This serves as a useful baseline estimate of the measurement uncertainty, as it does not contain any flow-induced contribution, but does contain any stray currents in the otherwise stationary fluid. The values listed in table 2 will be contextualized later in terms of flow-based and MTV-based length and time scales.
3 Results and discussion
3.1 Second-order transverse velocity correlation function
Single-component molecular tagging velocimetry (1c-MTV) results in a one-dimensional velocity profile in which the measured velocity is the component of flow velocity transverse to the tag-line. This naturally lends itself to the estimation of the second-order transverse velocity correlation function, g(r),
where \(\langle . \rangle\) indicates time-averaging, \({u_2}\) is the measured fluctuating velocity component, \({x_1}\) and r are the position-coordinate and separation distance, respectively, in the \(x_1\)-direction. This correlation function, along with other real-space turbulence descriptors, is a valuable tool for verifying and establishing measurement fidelity.
The influence of experimental parameters such as \(M_0\), (\(\varDelta {t}\)) and imaging sensor characteristics can be readily seen in the behavior of g(r). The reliability of g(r) is directly related to the dynamic velocity range (DVR) of the experiment. DVR can be defined as the ratio of the maximum measured displacement to the measurement uncertainty associated with that displacement. Turbulent flows require high-DVR experiments to accurately capture the multi-scale flow behavior. From the definition of DVR, insufficient pixel displacements in conjunction with low signal-to-noise measurements can result in a low DVR. Practically, low DVR can be caused by low \(M_0\), low (\(\varDelta {t}\)) or their combination. Attempts to increase pixel displacements by increasing \(M_0\) and (\(\varDelta {t}\)) independently and simultaneously do not guarantee a high DVR, as high pixel displacements in three-dimensional flows make the measurement susceptible to systematic errors. These stem from the component of flow velocity parallel to the tag-line. This makes it difficult to estimate the appropriate experimental parameters a priori. To counter this, measurements were obtained from four optical magnifications (\(M_0=0.11, 0.22, 0.45, 1.11\)) with four (\(\varDelta {t}\)) values, for each optical magnification case, ranging from 4 ms to 10 ms (see table 2).

Second-order transverse velocity correlation function (g(r)) vs. separation (r) for different optical magnifications and interframe time delays (listed in the legend), for \(f=3.2\) Hz, and \(S=55\) mm

Second-order transverse velocity correlation function (g(r)) vs. separation (r) for different optical magnifications and interframe time delays (listed in the legend), for \(f=4.1\) Hz, and \(S=55\) mm
Figure 2a shows the behavior of g(r) for \(M_0=0.11\) for different values of (\(\varDelta {t}\)), for \(f=3.2\) Hz. The behavior of g(r) can be understood in two regions: the near-origin part and the large-separation part. To better visualize the near-origin part, an inset is provided that shows g(r) for \(r\le 1\) mm. Data from \(\Delta t=4\) ms and \(\Delta t=6\) ms indicate a sharper near-origin decrease than that for \(\Delta t=8\) ms and \(\Delta t=10\) ms. This points to an influence of insufficient pixel displacement and leads to a loss of correlation. Conversely, in the large-separation part, i.e., for \(r>10\) mm, a stronger correlation is observed for \(\Delta t=4\) ms and \(\Delta t=6\) compared with the measurements for \(\Delta t=8\) ms and \(\Delta t=10\) ms. This indicates that when the large-scale motions are measured at the expense of small-scale motions, the area under the g(r) curve increases. This is a consequence similar to the effect of spatial averaging, which also leads to an under-accounting of the contributions from the small-scale motions; see figure 9 and section 4.2.4 in Spencer and Hollis (2005).
Figure 2b shows the behavior of g(r) for \(M_0=0.22\) for different values of (\(\varDelta {t}\)), for \(f=3.2\) Hz. While the overall behavior of g(r) is similar to that for \(M_0=0.11\), there are two noteworthy differences. Firstly, the near-origin curvature of g(r) for \(\Delta t=4\) ms and \(\Delta t=6\) ms is less sharp than in the \(M_0=0.11\) case. This can be attributed to the higher DVR for \(M_0=0.22\) than that for \(M_0=0.11\). Secondly, the large-separation part, albeit truncated because of a reduced field-of-view relative to the \(M_0=0.11\) case, lacks a distinguishable trend across different interframe delays. This suggests that the range of scales of motion that influence g(r) are better measured for \(M_0=0.22\) than for \(M_0=0.11\), for all values of (\(\varDelta {t}\)). The observed trend is, however, deemed indistinguishable within the scope of the arguments presented thus far, i.e., measurement noise and DVR, but can also be due to other factors such as camera lens characteristics, which are not explored herein.
Figure 2c shows the behavior of g(r) for \(M_0=0.45\) for different values of (\(\varDelta {t}\)), for \(f=3.2\) Hz. The plausibility of the argument that the range of scales of motion that influence g(r) are better measured for \(M_0=0.22\) than for \(M_0=0.11\), for all values of (\(\varDelta {t}\)), is given more credence upon observing the behavior of g(r) for \(M_0=0.45\), as the curves convincingly merge. The near-origin curvature of g(r) also exhibits similar behaviors to that for \(M_0=0.22\), with even the curve for \(\Delta t=4\) ms closely approaching the other curves. Figure 2d shows the behavior of g(r) for \(M_0=1.11\) for different values of (\(\varDelta {t}\)), for \(f=3.2\) Hz and \(S=55\) mm. With an increase in (\(\varDelta {t}\)) from 4 ms to 8 ms the area under g(r) increases. This can be attributed to progressively improving DVR. Anomalous behavior is, however, observed for \(\Delta t=10\) ms where the area under the curve sharply decreases. A plausible explanation here is systematic errors (which are directly proportional to \(\Delta t\)) resulting from the component of the instantaneous flow parallel to the tag-line.
Figure 3 illustrates the behavior of g(r) for \(M_0=0.11,\, 0.22,\,0.45,\) and 1.11 , respectively, for \(f=4.1\) Hz. This
figure also shows results for different values of (\(\varDelta {t}\)). The trends are similar to those observed for the \(f=3.2\) Hz data. The higher turbulence intensity for \(f=4.1\) Hz in comparison with that for \(f=3.2\) Hz improves the DVR overall. This improvement affects g(r) in a manner that can be readily observed from the insets provided in Fig. 3. Here, the curves approach each other more closely for \(f=4.1\) Hz than for \(f=3.2\) Hz.
While the behavior of g(r) has thus far been discussed in relation to the MTV experimental parameters, it is desirable to corroborate the accuracy with derived quantities such as the longitudinal integral length scale, l, and the longitudinal Taylor microscale, \(\lambda\) that are both directly dependent on g(r). The present longitudinal integral length scale and Taylor microscale data are compared with reference values.
The longitudinal integral length scale is calculated by integrating g(r) up to its first zero-crossing as given by
Since the 1c-MTV fields-of-view are typically smaller than those adopted for other measurement techniques such as particle image velocimetry (PIV), an extrapolation of the g(r) curve is necessary to permit integration out to the first zero-crossing. Such is the case for all the optical magnifications employed in the current study. A decaying exponential fit considering the tail of the longitudinal velocity-correlation function (f(r)) curve was used to extrapolate the curve in de Jong et al. (2009) to asymptotically obtain a zero-crossing estimate. In this study, we adopt a decaying exponential fit considering the tail of the g(r) curve, to extrapolate the same. This means that a strict zero-crossing of g(r), as is theoretically expected, will not be obtained. Owing to this, the l estimates might not be completely accurate. They, however, serve as reliable surrogates since the contribution of the asymptotic exponential tail, past the value of r corresponding to the strict zero-crossing of g(r), toward the estimation of l can be considered to be minimal.

Longitudinal integral length scale, l, for different optical magnifications (listed in the legend) and interframe time delays—a \(f=3.2\) Hz, \(S=55\) mm, and b \(f=4.1\) Hz, \(S=55\) mm
The longitudinal Taylor microscale (\(\lambda\)) is calculated from the near-origin curvature in g(r) as given by (Pope 2000)
Figures 4 and 5 respectively show the behavior of l and \(\lambda\). The conditions here are \(f=3.2\) Hz, and \(f=4.1\) Hz. Unlike \(\lambda\), l is affected by the extrapolation procedure which becomes more pronounced as \(M_0\) increases and the field-of-view is reduced. Notwithstanding the data from \(M_0=0.11\) for \(f=4.1\) Hz, the l estimates remain robust to changes in (\(\varDelta {t}\)) for a given \(M_0\). An apparent difference between the estimates from \(M_0=1.11\) and those from the other optical magnifications can be observed for both the \(f=3.2\) Hz and \(f=4.1\) Hz cases. This can be attributed to the field-of-view being the smallest for \(M_0=1.11\), in comparison with the other optical magnifications in this study. The net result here is an increased impact of the extrapolation procedure on the l estimates. Based on the OGT model proposed by Hopfinger and Toly (1976), the integral length scale (l) varies linearly with the distance from the mean grid position (\(x_3\)). McCorquodale and Munro (2018) express this as
with \(C_{l}=0.13\). For \(x_3=135\) mm, the OGT model results in \(l \approx 17.5\) mm. Based on this value, data from all \(M_0\) except \(M_0=1.11\) exhibit close agreement with the reference value. Additionally, it can be observed that data from \(M_0=0.11\) for \(\Delta t=4\) ms and \(\Delta t=6\) ms deviates from the reference value, for \(f=4.1\) Hz.
Figure 5 reveals that the \(\lambda\) estimates largely agree with each other and remain relatively robust to changes in (\(\varDelta {t}\)) for a given \(M_0\), excepting \(M_0=1.11\). The exception can be explained by the near-origin behavior of g(r) (see inset in figures 1d and 2d). Values of \(\lambda \approx 6\) mm and \(\lambda \approx 5.5\) mm exhibit the closest agreement with the reference \(\lambda\) values reported in Hopfinger and Toly (1976), for \(f=3.2\) Hz, and \(f=4.1\) Hz, respectively. These values are obtained for \(\Delta t \ge 6\) ms for all values of \(M_0\), except \(M_0=1.11\).

Longitudinal Taylor microscale, \(\lambda\), for different optical magnifications (listed in the legend) and interframe time delays—a \(f=3.2\) Hz, \(S=55\) mm, and b\(f=4.1\) Hz, \(S=55\) mm
3.2 Second-order transverse velocity structure function
Another important turbulence descriptor in the physical space is the second-order transverse velocity structure function which is given by Davidson (2015),
Not only is this structure function analogous to the transverse velocity correlation function, but one can also verify the existence of the inertial sub-range (IR) through the well-established ‘2/3’ scaling law proposed by Kolmogorov (1941). For separations smaller than the inertial sub-range, Yeung and Zhou (1997) demonstrate a \(r^2\)-scaling law which is indicative of the universal behavior of the small scales.
Figures 6 and 7 show \([\Delta _g u]^2\) for \(f=3.2\) Hz, and \(f=4.1\) Hz, respectively. In both the figures, ‘\(r^{2/3}\)’ is represented by the black dashed-line, and ‘\(r^{2}\)’ is represented by the gray dash-dotted line. For \(M_0=0.11\), it can be observed the curves for \(\Delta t=8\) ms and \(\Delta t=10\) ms almost lie on top of each other, indicating that increasing the DVR further does not affect \([\Delta _g u]^2\). The same observation also holds for \(M_0=0.22\) and \(M_0=0.45\). The portion of the curve for \(r<0.5\) mm is, however, becoming more inflected, although mildly, with increasing \(M_0\). Increasing \(M_0\), and consequently the DVR, results in an evident display of \(r^2-\)scaling. This implies that motions in the dissipation range are adequately captured by increasing the DVR through \(M_0\). The form of \([\Delta _g u]^2\) for \(r<0.1\) mm, which is expected to be smaller than the Kolmogorov scale, is not available in the literature and therefore the accuracy of the small-separation portion of the curve from these experiments cannot be independently corroborated at present. Nevertheless, the decreasing inflection in \([\Delta _g u]^2\) for \(r<0.5\) mm, can be explained on account of Kolmogorov-scale motions and sub-Kolmogorov-scale motions being measured reliably with increasing DVR (also see table 4 in section 4). This argument receives credence from Fig. 7 where the more energetic flow condition (for \(f=4.1\) Hz) results in a better overall DVR. This is evidenced in the curves obtained from different (\(\varDelta {t}\)) approaching each other more closely.

Second-order transverse velocity structure function (\([\Delta _g u]^2\)) vs. separation (r) for different optical magnifications and interframe time delays (listed in the legend), for \(f=3.2\) Hz

Second-order transverse velocity structure function (\([\Delta _g u]^2\)) vs. separation (r) for different optical magnifications and interframe time delays (listed in the legend), for \(f=4.1\) Hz, and \(S=55\) mm
3.3 Turbulence energy dissipation rate
High-spatial-resolution measurements are crucial for turbulent flows to resolve the multi-scale phenomena as much as possible, and for accurate estimation of spatial velocity gradients. The energy dissipation rate, an important turbulence parameter, can be estimated by many methods. The most common and straightforward method involves applying the local isotropy assumption and spatial velocity gradients available from a one-dimensional measurement of the flow as given by
In this study, the spatial velocity gradients are obtained from central-difference schemes of different order (second-,fourth- and sixth-order), and also from third-order Savitzky-Golay differentiation of varying window lengths (11, 21 and 31). The rationale behind the choice of different schemes stems from seeking to isolate the effect of noise-reduction by curve-fitting, and capturing fine variations in the data. For the central-difference, higher-order schemes have the ability to capture high-wavenumber variations in the data. On the other hand, lower-order schemes are used for noise-reduction by essentially fitting the data with a smoothing polynomial. Similarly for the Savitzky-Golay method smaller filter lengths capture the high-wavenumber variations while larger filter lengths mitigate the effect of noise. The balance between the two effects is essential to optimizing dissipation rate estimates.
Figure 8a and b shows the \(\langle \epsilon _{iso} \rangle\) estimates calculated from 2nd-, 4th-, and 6th-order central-difference schemes, for \(f=3.2\) Hz, and \(f=4.1\) Hz, respectively. Overall, \(\langle \epsilon _{iso} \rangle\) values for all the experimental conditions increase with increasing order of the difference scheme. This is a natural consequence of the higher-order scheme capturing the high-wavenumber variations in the data. It can be observed that the estimates are sensitive to \(M_0\) and (\(\varDelta {t}\)) for both the flow conditions. For a given \(M_0\), the estimates decrease with increasing (\(\varDelta {t}\)). On the other hand, for a given (\(\varDelta {t}\)), the estimates increase with increasing \(M_0\). Both of these trends can be explained by considering the available DVR and measurement noise. Increasing the (\(\varDelta {t}\)) increases the available DVR for a given \(M_0\). With increasing \(M_0\) and a given (\(\varDelta {t}\)), the available DVR increases as well. At small values of (\(\varDelta {t}\)), due to insufficient DVR, the measurement noise amplifies the measured gradients. This explains the larger \(\langle \epsilon _{iso} \rangle\) values for smaller (\(\varDelta {t}\)). With increase in (\(\varDelta {t}\)), the increase in DVR leads to a commensurate diminution of the measurement noise effect. This consequently allows for the \(\langle \epsilon _{iso} \rangle\) values to settle and exhibit signs of robustness to any further increase in (\(\varDelta {t}\)), which can be observed by a plateauing of the estimates for a given \(M_0\) in figure 8. The same behavior is observed for all \(M_0\). For a given (\(\varDelta {t}\)), the available DVR increases with increasing \(M_0\). Here, smaller-scale motions are progressively captured, leading to higher \(\langle \epsilon _{iso} \rangle\) values.

Estimates of \(\langle \epsilon _{iso} \rangle\) from different central difference schemes (listed in the legend), for different optical magnifications (listed in the legend) and interframe time delay—a \(f=3.2\) Hz, and \(S=55\) mm, and b \(f=4.1\) Hz, and \(S=55\) mm
Based on the arguments presented hitherto, it is thus inferred that while increasing the available DVR by either increasing \(M_0\) or by increasing (\(\varDelta {t}\)) is equivalent in theory, it is different in practice because of tag-line width considerations and the signal-to-noise ratio of the images.
Figure 9a and b shows the \(\langle \epsilon _{iso} \rangle\) estimates calculated using third-order Savitzky-Golay differentiation and of differing window lengths — 11,21 and 31 — for \(f=3.2\) Hz, and \(f=4.1\) Hz, respectively. The data exhibit similar behavior to \(\langle \epsilon _{iso} \rangle\) estimate from the central-difference schemes. Overall, \(\langle \epsilon _{iso} \rangle\) values for all the experimental conditions decrease with increasing window length of the Savitzky-Golay filter. This is a natural consequence of the smaller window lengths capturing the higher wavenumber variations in the data.

Estimates of \(\langle \epsilon _{iso} \rangle\) from third-order Savitzky-Golay differentiation of different window lengths (listed in the legend), for different optical magnifications (listed in the legend) and interframe time delays—a \(f=3.2\) Hz, and \(S=55\) mm, and b \(f=4.1\) Hz, and \(S=55\) mm
In comparison with l and \({\lambda }\), not many suitable benchmarks for \(\langle \epsilon \rangle\) have been reported in the OGT flow literature. A notable exception is the study by Kit et al. (1997) who conducted experiments for \(M=80\) mm, \(S=32\) mm, and \(f=2.9\) Hz & 4.5 Hz. They reported a value of \(\langle \epsilon \rangle \approx 0.6\times 10^{-4}\) W/kg and \(\langle \epsilon \rangle \approx 1.5\times 10^{-4}\) W/kg, at \(x_3 \approx 140\) mm, for the two flow conditions, respectively (see figure 4 in Kit et al. (1997)). Their results are dimensionally comparable to the present, as they also employed a water flow facility. The present \(\langle \epsilon _{iso} \rangle\) values obtained from spatial velocity gradients are consistently about an order of magnitude higher than the above-mentioned reference values.
To estimate \(\langle \epsilon \rangle\) using an alternative method that does not involve gradients, the scaling law proposed by Kolmogorov for the second-order velocity structure function can be used,
An iterative procedure was adopted, until convergence, by assuming an initial value based on the infinite-\(R_{\lambda }\) limit for \(C_2\), i.e., \(C_2(\infty ) \approx 2.12\) (Kolmogorov 1941). The dissipation rate estimate from the initial step was used to estimate \(R_{\lambda }\) from the following equation,
which was then used to correct for \(C_2\) based on the values reported in Yeung and Zhou (1997) to account for the finite-\(R_{\lambda }\) effects.

Structure-function-based dissipation rate estimate, \(\langle \epsilon _{sf} \rangle\), for different optical magnifications (listed in the legend) and interframe time delays—a \(f=3.2\) Hz, \(S=55\) mm, and b \(f=4.1\) Hz, \(S=55\) mm
Figure 10 shows the \(\langle \epsilon _{sf} \rangle\) estimates for \(f=3.2\) Hz, and \(f=4.1\) Hz, respectively. Unlike \(\langle \epsilon _{iso} \rangle\), the \(\langle \epsilon _{sf} \rangle\) estimates exhibit greater robustness to changes in \(M_0\) and (\(\varDelta {t}\)). This is because the inertial sub-range (IR) is captured adequately and reliably for all the experimental conditions explored. This results in consistent \(\langle \epsilon _{sf} \rangle\) estimates. Here, \(\langle \epsilon _{sf} \rangle \approx 2\times 10^{-4}\) W/kg for \(f=3.2\) Hz, and \(\langle \epsilon _{sf} \rangle \approx 6\times 10^{-4}\) W/kg for \(f=4.1\) Hz. These estimates exhibit the closest agreement with the reference values reported in Kit et al. (1997). These results also suggest that \(\langle \epsilon _{sf} \rangle\) is the more reliable and robust way of estimating the turbulence energy dissipation rate for this flow.
4 Additional experimental considerations
In this section, the MTV design parameters contextualized with flow-based and technique-based time and length scales are presented. This enables the consideration of the design parameters in the context of time and length scales of the measured turbulent flow, in addition to the constraints imposed by the technique. Owing to the exponential decrease of phosphorescent intensity with time (Koochesfahani and Nocera 2007), the maximum possible (\(\varDelta {t}\)) values for sufficient image signal-to-noise ratio is constrained by the tracer lifetime, \(\tau _{tr}\), which is defined as the time it takes for the phosphorescent intensity to drop to 1/e of the original intensity and is estimated based on the procedure outlined in Hui and Koochesfahani (2006). On the other hand, with increasing \(M_0\) the tag-line pixel width (\(w_{line}\)), calculated as full width at half maximum (FWHM), increases and thus influences the measurement uncertainty. Since an FFT-based correlation is used to obtain the displacements, a sharp Gaussian tag-line profile is desired to minimize measurement uncertainty. Increasing \(w_{line}\) results in a broader correlation peak and an increased susceptibility to corruption from random noise. In this regard, \(w_{line}\) becomes an important length scale from the measurement technique perspective.
While the vector spacing from the tag-line can be controlled by varying \(M_0\), the final resolution available from 1c-MTV also depends on \(t_{\text {exp},1}\), \(t_{\text {exp},2}\) and \(t_{\text {delay},2}\) (see Table 2). The exposure and delay time periods must be set lower than the attrition time periods of the turbulent scales of interest. From the turbulence perspective, the Kolmogorov length scale, \(\eta = \nu ^{3/4} \langle \epsilon \rangle ^{-1/4}\), and time scale, \(\tau _{\eta } = \nu ^{1/2} \langle \epsilon \rangle ^{-1/2}\), serve as appropriate quantities in contextualizing the high-resolution capability of 1c-MTV. Lastly, the ad hoc estimate of the base measurement uncertainty obtained by 1c-MTV measurements of fluid at rest is contextualized with the Kolmogorov velocity, \(u_{\eta }=\nu ^{1/4} \langle \epsilon \rangle ^{1/4}\). For reasons described above, the \(\langle \epsilon _{sf} \rangle\) estimates are used for calculating \(\eta\), \(\tau _{\eta }\) and \(u_{\eta }\), which are presented in table 3 along with \(w_{line}\) (for increasing \(M_0\)) and \(\tau _{tr}\). Table 4 details the 1c-MTV experimental parameters contextualized with the Kolmogorov length (\(\eta\)) and time (\(\tau _{\eta }\)) scales. The ad hoc estimate of the measurement uncertainty, expressed as displacement (\(\delta x_2\)) in table 2, is used in normalization by estimating the corresponding velocity magnitudes (\(\delta u_2=\delta x_2/\varDelta t\)) in table 4. The pixel-displacement corresponding to \(u_{\eta }\) (\(\varDelta x_{2_{\eta }}\)) is used to explain the interdependencies between \(M_0\) and (\(\varDelta {t}\)), in relation to the sufficiency of DVR.
The results of table 4, imply that the 1c-MTV experimental design adopted in the current study is able to leverage the high-resolution capability of 1c-MTV for measuring turbulent flows. To make the results more universal and easier to translate to another configuration, DVR based on \(u_{\eta }\) is mentioned in table 4. While the baseline measurement uncertainty is lower than the Kolmogorov velocity, the strength of the flow-induced contribution toward the measurement uncertainty is not known. By disregarding contributions to uncertainty from poor DVR and focusing on the susceptibility to noise that stems from correlation-peak broadening and motion tangential to the tag-line, it is concluded that data from \(M_0=0.45\) (\({\eta }=18{\Delta x_1}\) for f=3.2 Hz, and \({\eta }=13 \Delta x_1\) for f=4.1 Hz) represent the most reliable and the highest resolution case. That is, this case provides sufficient DVR while ensuring that the tag-line pixel width stays within reasonable limits to mitigate correlation-peak broadening and errors associated with motions tangential to the tag-line. Additionally, Fig. 11 shows the intensity profiles, rescaled by a factor of \(2^{16}\) since the images were obtained using a 16-bit camera, across the tag-line from \(M_0=0.45\) for different interframe time delays, along with the corresponding signal-to-noise ratios (SNR) which is defined as the ratio of the intensity averaged in the 5-pixel neighbourhood of the maxima to the noise-floor. The definition of SNR used in this study is akin to contrast in that the noise-floor is the background intensity. Variations in the intensity of individual pixels are not considered in the estimation of SNR, since the FFT-based data-reduction procedure followed in the study makes the obtained pixel-displacements immune to the effect of random electronic noise. For a fixed tag-line width, the noise-floor, however, contributes to the FFT-based correlation. It is for these reasons that the contrast-based definition of SNR is adopted in the present study. Note that the data plotted in Fig. 11 are representative of all other time-instants.

Grayscale image intensity rescaled by a factor of \(2^{16}\) (imaged using a 16-bit camera) versus pixel location for the most reliable, high-resolution case (\(M_0=0.45\)) from among the cases in the current study
5 Conclusions
Experiments were conducted to characterize oscillating grid turbulence (OGT) using 1c-MTV. The measurements incorporated four optical magnifications (\(M_0\)) and multiple interframe time delays ((\(\varDelta {t}\))). The influence of MTV design parameters (\(M_0\) & (\(\varDelta {t}\))) on measurement quality was examined through the second-order transverse velocity correlation function (g(r)), the second-order transverse velocity structure function (\(\langle [\Delta _g u]^2 \rangle\)), and the turbulence energy dissipation rate (\(\langle \epsilon \rangle\)), in addition to the longitudinal integral length scale (l) and Taylor microscale (\(\lambda\)). The insensitivity of these turbulence descriptors to MTV design parameters, and the closeness of agreement with the relevant values available in literature were used to determine the optimal experimental conditions for obtaining reliable high-resolution turbulence data. The performance traits were attributed to causes within the purview of available dynamic velocity range and measurement uncertainty. The experimental design parameters are contextualized with the Kolmogorov length (\(\eta\)), time (\(\tau _{\eta }\)) and velocity (\(u_{\eta }\)) scales, as based on the most reliable \(\langle \epsilon \rangle\) estimates from the current experiments. The pixel-displacement corresponding to \(u_{\eta }\) (\(\Delta x_{2_{\eta }}\)) describes the interdependencies between \(M_0\) and (\(\varDelta {t}\)).
From the OGT model, a reference value of \(l \approx 17.5\) mm is obtained for \(x_3=135\) mm. Based on this value, data from all \(M_0\), except \(M_0=1.11\), exhibit close agreement, with the exception of \(\Delta t=4\) ms and \(\Delta t=6\) ms in \(M_0=0.11\) for \(f=4.1\) Hz. From the reference values of \(\lambda\) reported in Hopfinger and Toly (1976), \(\lambda \approx 6\) mm and \(\lambda \approx 5.5\) mm exhibit the closest agreement for \(f=3.2\) Hz, and \(f=4.1\) Hz, respectively. These values are obtained for \(\Delta t \ge 6\) ms for all values of \(M_0\), except \(M_0=1.11\). The values of \(\lambda\) result in corresponding \(R_{\lambda }\) values of \(\approx 100\) and \(\approx 125\), for \(f=3.2\) Hz and \(f=4.1\) Hz, respectively. For estimating \(\langle \epsilon \rangle\), central difference schemes of different order, and Savitzky-Golay differentiation with different window lengths were adopted. Both of these approaches over-predict \(\langle \epsilon \rangle\) in comparison with the reference values reported in Kit et al. (1997). While all the \(\langle \epsilon _{iso} \rangle\) estimates exhibit sensitivity to \(M_0\), Savitzky-Golay differentiation improves robustness to (\(\varDelta {t}\)) compared to the central difference schemes. Dissipation rate estimates from the second-order transverse velocity structure functions (\(\langle \epsilon _{sf}\rangle\)) demonstrate superior robustness to both \(M_0\) and (\(\varDelta {t}\)), while also agreeing well with the reference values reported in Kit et al. (1997) — \(\langle \epsilon _{sf}\rangle \approx 2\times 10^{-4}\) W/kg for \(f=3.2\) Hz, and \(\langle \epsilon _{sf} \rangle \approx 6\times 10^{-4}\) W/kg for \(f=4.1\) Hz. This makes \(\langle \epsilon _{sf} \rangle\) a reliable candidate for estimating the turbulence energy dissipation rate for this flow using 1c-MTV.
Overall, \(M_0=0.45\) (\({\eta }=18{\Delta x_1}\) for f=3.2 Hz, and \({\eta }=13 \Delta x_1\) for f=4.1 Hz) was identified to be the optimal magnification for obtaining reliable high-resolution turbulence data, out of the four tested in the current study. This conclusion was deduced by taking the performance of all the turbulence descriptors into account — a procedure that is recommended. As far as the interframe time delay is concerned, \(\Delta t \ge 4\) ms (\(\Delta x_{2_{\eta }} \ge 0.5\) pixels) works well for all \(M_0\). To the best of the authors’ knowledge, the present study documents the first instance of a series of 1c-MTV experiments conducted for a systematic clarification of the nature of balancing the available dynamic range, and the measurement uncertainty, for characterizing turbulence with negligible mean-flow created by an oscillating grid, which is an adequate representation of a three-dimensional flow. Importantly, the present experiments demonstrate that 1c-MTV can be used in OGT flow to measure turbulent motions that are considerably smaller than the Kolmogorov microscale.
5.1 Designing a 1c-MTV experiment for turbulent flows
Before designing a 1c-MTV experiment, it is essential to acknowledge and quantify, if possible, the constraints imposed by the flow such as the range of velocities, length and time scales, etc. Optical magnification (\(M_0\)), physical line-thickness, exposure time period (\(t_{\text {exp},1}\), \(t_{\text {exp},2}\)) and interframe time delay (\(\varDelta t\)) constitute the primary design parameters of the 1c-MTV system. In the absence of a priori information about the flow, a systematic variation of 1c-MTV design parameters similar to the methodology adopted in the current study is necessary to understand the influence of each design parameter. Notwithstanding the interplay between \(M_0\) and \(\Delta t\), \(M_0\) is often the first design parameter that must be selected. The recommendation is to progressively increase \(M_0\) from a suitable initial value which can be based on the largest field-of-view required for a given flow experiment. With \(M_0\) fixed, multiple values of \(\Delta t\) should be tested to address the fundamental trade-off of 1c-MTV (see section 1).
The exposure time periods for both the undeformed and deformed images must be optimized for maximizing image signal-to-noise ratio while minimizing temporal-averaging of the measured velocity-component. The optimization should include the interplay between laser energy-density, physical line-thickness, tracer lifetime, and the exposure time period. Note that for a fixed physical line-thickness, the imaged tag-line width (\(w_{line}\)) increases with increasing \(M_0\), which influences the measurement uncertainty (see section 4).
Restricting attention to turbulent flows, a reliable estimation of the turbulent energy dissipation rate is a crucial input for the 1c-MTV design process since the achievable resolution, and the extent of temporal-averaging and spatial-averaging are based on quantities that derive from \(\langle \epsilon \rangle\). Results from the current study suggest that dissipation rate estimates from the second-order structure function (\(\langle \epsilon _{sf} \rangle\)) are invariant under changing \(M_0\) and \(\Delta t\) (see Fig. 10). By obtaining data from an initial \(M_0\), \(\langle \epsilon _{sf} \rangle\) estimates can provide crucial information about the achievable resolution, and the extent of temporal-averaging and spatial-averaging. This can guide the experimenter to deciding on the optimal primary design parameters that adequately resolve the flow of interest.
Data availability
Data sets can be made available, upon request, by the corresponding author.
References
Davidson PA (2015) Turbulence: an introduction for scientists and engineers. Oxford university press, Oxford
de Jong J, Cao L, Woodward SH, Salazar JPLC, Collins LR, Meng H (2009) Dissipation rate estimation from PIV in zero-mean isotropic turbulence. Exp Fluids 46(3):499–515
de Silva IPD, Fernando HJS (1994) Oscillating grids as a source of nearly isotropic turbulence. Phys Fluids 6(7):2455–2464
Elsnab JR, Monty JP, White CM, Koochesfahani MM, Klewicki JC (2017) Efficacy of single-component MTV to measure turbulent wall-flow velocity derivative profiles at high resolution. Exp Fluids 58(9):1–11
Hill RB, Klewicki JC (1996) Data reduction methods for flow tagging velocity measurements. Exp Fluids 20(3):142–152
Hammer P, Pouya S, Naguib A, Koochesfahani M (2013) A multi-time-delay approach for correction of the inherent error in single-component molecular tagging velocimetry. Measure Sci Technol 24(10):105302
Hopfinger EJ, Toly J-A (1976) Spatially decaying turbulence and its relation to mixing across density interfaces. J Fluid Mech 78(1):155–175
Kolmogorov AN (1941) The local structure of turbulence in incompressible viscous fluid for very large Reynolds numbers. Cr Acad Sci URSS 30:301–305
Koochesfahani MM, Nocera DG (2007) Molecular tagging velocimetry. Handbook of experimental fluid dynamics, pp 362–382
McCorquodale MW, Munro RJ (2018) A method for reducing mean flow in oscillating-grid turbulence. Exp Fluids 59(12):1–16
McDougall TJ (1979) Measurements of turbulence in a zero-mean-shear mixed layer. J Fluid Mech 94(3):409–431
Pope SB (2000) Turbulent flows. Cambridge university press, Cambridge
Soloff SM, Adrian RJ, Liu Z-C (1997) Distortion compensation for generalized stereoscopic particle image velocimetry. Measure Sci Technol 8(12):1441
Spencer A, Hollis D (2005) Correcting for sub-grid filtering effects in particle image velocimetry data. Measure Sci Technol 16(11):2323
Kit ELG, Strang EJ, Fernando HJS (1997) Measurement of turbulence near shear-free density interfaces. J Fluid Mech 334:293–314
Hui H, Koochesfahani MM (2006) Molecular tagging velocimetry and thermometry and its application to the wake of a heated circular cylinder. Measure Sci Technol 17(6):1269
Yeung PK, Zhou Y (1997) Universality of the Kolmogorov constant in numerical simulations of turbulence. Phys Rev E 56(2):1746
Funding
Open Access funding enabled and organized by CAUL and its Member Institutions.
Author information
Authors and Affiliations
Contributions
BR helped in writing—original draft, conceptualization, methodology, investigation, and formal analysis. JCK helped in supervision, conceptualization, and writing—review and editing. JP done supervision, formal analysis, and writing—review and editing.
Corresponding author
Ethics declarations
Conflict of interest
No conflict of interest.
Ethical approval
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ramesh, B., Klewicki, J.C. & Philip, J. Adopting molecular tagging velocimetry for high-resolution measurements of oscillating grid turbulence. Exp Fluids 65, 46 (2024). https://doi.org/10.1007/s00348-024-03787-z
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00348-024-03787-z