
Abstract
We have proposed and demonstrated a novel technique to measure distance with high range precision. To meet the stringent requirements of a variety of applications, range precision is an important specification for laser radar systems. Range precision in conventional laser radar systems is limited by several factors, namely laser pulse width, the bandwidth of a detector, the timing resolution of the time to digital converter, shot noise and timing jitters generated by electronics. The proposed laser radar system adopts a Pockels cell and a quadrant photodiode and only measures the energy of a laser pulse to obtain range so that the effect of those factors is reduced in comparison to conventional systems. In the proposed system, the measured range precision was 5.7 mm with 100 laser pulses. The proposed method is expected to be an alternative method for laser radar system requiring high range precision in many applications.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Laser radar (LADAR) is commonly used to measure the distance between a target and a system and is well suited for various applications. The system measures the range of scenes of interest and generates three-dimensional data. With such data, LADAR systems can be used for topographic mapping, automatic target recognition, autonomous safe landing and so on [1–3]. To complete these kinds of missions, range precision is the most important parameter of LADAR systems.
Various techniques are employed to obtain optical distance measurements including interferometry, time of flight (TOF) and triangulation [4]. For long-range measurements and working outdoors, TOF methods are employed in many LADAR systems [5]. The conventional TOF LADAR system transmits a laser pulse (start signal), triggering the time to digital converter (TDC). The transmitted laser pulse reflects off a target. The laser-return pulse (stop signal) is detected by an avalanche photodiode (APD). The APD generates an electrical signal to stop the TDC. The time interval between the start signal and the stop signal is converted into distance. Range precision is determined by the closeness of such measurements to independent range results acquired under identical environmental circumstances [6].
The range precision of the LADAR system depends on a number of factors including the laser pulse width, the timing resolution of the APD, the timing resolution of the TDC, shot noise and the timing jitters generated by electronics [7, 8]. Because of these factors, range precision has a limit. Generally, the range precision of the conventional LADAR system is several centimeters [9, 10]. A commercial LADAR system has several millimeters in range precision [11]. To obtain better range precision, a shorter laser pulse width is needed. However, short laser pulses require a high-bandwidth APD and a high timing resolution TDC [12]. This limitation can be overcome by averaging with the improvement proportional to 1/√(the number of results averaged), as compared to a single measurement result [13]. However, repeating measurements under the same condition many times (typically 104–106) is time-consuming [14, 15].
In this paper, we developed and demonstrated a novel LADAR system that achieves high range precision without the need for high-performance APD and TDC, which are usually essential for high range precision in existing measurement methods. The proposed LADAR system is implemented using a Pockels cell and a quadrant photodiode (QPD). A laser pulse is emitted from a laser, triggering the Pockels cell. The laser pulse is scattered by the target and is reflected back to the LADAR system while the polarization modulator is rotating the polarization state as a function of time. The polarization state of the laser-return pulse passing through the polarization modulator is changed to a certain polarization state, and the QPD then measures the intensities of laser-return pulse to calculate the polarization state. The function of range and polarization state is already known so that the change of the polarization can be converted to range.
The proposed LADAR system achieves a similar level of range precision as that of a commercial LADAR system. Furthermore, a high-bandwidth APD and a high-resolution TDC are not required for high range precision, since in this system only the energy of the laser pulse is measured.
2 Principle of the technique
The schematic diagram of the LADAR system using a Pockels cell and a quadrant photodiode is shown in Fig. 1. A laser pulse is transmitted by a light source and passes through the optical system, triggering the delay pulse generator (DPG). Then, the DPG triggers the Pockels cell at a certain delay time to start modulating the polarization state. Once the Pockels cell is triggered, the voltage applied to the Pockels cell starts to change to the half-wave voltage. It takes time (typically a few nanoseconds) for the applied voltage to reach the half-wave voltage. In other words, the voltage change has a rise time. During the rise time, the polarization modulator is changing the polarization state. Therefore, the rise time determines the range gate which corresponds to a polarization modulation time.

A schematic diagram of LADAR system (QWP quarter-wave plate, QPD quadrant photodiode)
When the transmitted laser pulse is directed to the target and scattered, the scattered light in the field of view (FOV) of the optical system is collected in the QPD through the polarization modulator. While the laser pulse is traveling, the polarization state is rotating. When the laser-return pulse from the target passes through the polarization modulator, the polarization of the laser-return pulse is changed to a certain polarization state, and this polarization state is different depending on the arrival time of the laser-return pulse. Namely, the polarization states of the laser-return pulses are different depending on where the targets are located. Consequently, the polarization state is also related to the range of the target. Then, the QPD measures the return signal and the computer calculates the polarization state of the laser-return pulse. If the function between the polarization state and range is already known, the calculated polarization state can be converted into range by using the function. The delay time of the DPG controls the location of the range gate so that it determines where to start measuring. This range gate can be scanned in depth by changing the delay time to acquire the range of the target. The length of the range gate can be controlled by adding of a resistor or a capacitor in the circuit of the Pockels cell.
Figure 2 shows a schematic diagram of the polarization modulator consisting of the vertical polarizer, Pockels cell and quarter-wave plate (QWP) in turn. The fast axes of the Pockels cell and QWP are 45° and 0°, respectively. A polarizer array consisting of four polarizers is aligned in front of the QPD. The QPD has four pixels which are aligned with the four polarizers pixel by pixel.

A schematic diagram of the polarization modulator (QWP quarter-wave plate, QPD quadrant photodiode, o ordinary, e extraordinary)
Using Jones calculus, the polarization state of the light as it passes through each optical element is described mathematically. With the fast axes of the Pockels cell and QWP oriented as above, the Jones vector of the output beam passing through the polarizer, Pockels cell and QWP can be calculated as
where φ is the polarization state directly proportional to the applied voltage of the Pockels cell, PC is the Pockels cell, P is the polarizer. Since a Jones vector that describes unpolarized light does not exist, assume that the incoming light is a linearly polarized beam, oriented to the y axis of the system. The output beam is linearly polarized with rotation in accordance with the change of the polarization state. Once the Pockels cell is triggered, the voltage applied to the Pockels cell starts to change with time. This means that the polarization modulator changes the polarization state with respect to time.
The next element is the polarizer array whose axes are 0°, 45°, 90° and 135° in a clockwise direction. The intensities after each polarizer are expressed as
where I is the original intensity of the laser beam, I 0, I 45, I 90 and I 135 are the intensities after the polarizers whose axes are 0°, 45°, 90° and 135°, respectively. The value of φ can be obtained from Eqs. (2) to (5) as
The QPD measures four intensities and the polarization state of the laser-return pulse is calculated using Eq (6).
Figure 3 shows the change in polarization state with respect to range and its fit curve. The measurement target was positioned at 0.15 m intervals between 15 and 17.7 m to obtain the change in the polarization state. Using these data, the fit curve was calculated for the function of the polarization state and range. As backscattering from the target passes through the QWP, the laser pulse has a certain linear polarization. Then, the polarization state is calculated using the four intensities measured by QPD signals. The value of the polarization state is already known with respect to range from the fit curve. Thus, range can be obtained by the polarization state of the laser-return pulse calculated using QPD signals. The range gate of the proposed LADAR system is determined within the modulation time of the polarization state. The range gate is about 10 ns (1.5 m) in this system and starts at a selectable time after the laser pulse is transmitted. This means that objects in the range of 1.5 m can be measured simultaneously and the start point of the range gate can be adjusted to where the interesting scene is located.

Polarization state as a function of range and its fit curve (φ phase retardation)
3 Experimental setup and results
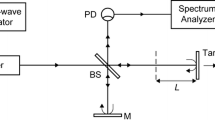
Figure 4 shows the optical layout for the proposed LADAR system. A passively Q-switching microchip laser whose wavelength is 532 nm was used as a light source. Laser pulses with a full width at half maximum of 800 ps were transmitted at a repetition rate of 5 kHz, and the output energy per pulse was 3 μJ. The laser pulse is collimated by lenses L1 and L2. The S-polarization of the laser beam is reflected to the photodiode at PBS1 to generate the start signal; the start signal is used as the triggering source of the DPG. Due to the linear polarization after PBS1, the combination of HWP2 and PBS2 is used to adjust the transmission of laser pulses. Then, QWP1 is used for a transmit–receive switch. The rest of the laser beam is directed to the target and scattered. The scattered light in the FOV of the optical system is collected and focused into the QPD through the polarizer, Pockels cell and QWP2 in turn. The combination of the polarizer, Pockels cell and QWP2 is used for changing of the polarization state.

Optical layout (L lens, HWP half-wave plate, PBS polarizing beam splitter, QWP quarter-wave plate, PD photodiode, QPD quadrant photodiode)
The Pockels cell used for the proposed LADAR system was FastPulse Technology, Inc. Q1059PSG-532. The bandwidth of the QPD (New focus 2901) is approximately 100 kHz. The maximum sample rate and the resolution of the digitizer (ZTEC Instruments Inc. ZT4611) are 2 GS/s and 8 bits, respectively.
Range precision is the measurement of the pulse-to-pulse deviation in measured ranges to a target located at around 16 m. The target was a flat plate oriented in a plane normal to the transmitted laser beam. 100 laser pulses were recorded to determine range. Signals from the QPD were recorded by the digitizer and then the polarization state of the laser pulse was computed by integrating measured signals with time. The polarization angle data were translated into range by using the fit curve between the range versus polarization state.
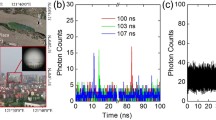
The difference between the measured ranges and the average value of the total data is plotted in Fig. 5a, and the statistical range distribution is analyzed in a histogram in Fig. 5b. The probability density function (PDF) is fitted with the normal distribution function, and Gaussian distribution can be seen clearly. A standard deviation of 5.7 mm is measured. Pulse-to-pulse variation of the range occurred due to timing and signal jitters in the system. Compared to a conventional LADAR system, the proposed system is less affected by electrical timing jitter and shot noise because the system measures the energy of the laser pulse not the TOF. Furthermore, if the modulation time is reduced while maintaining the amount of voltage change, the slope of the function between the polarization state and range becomes steeper so that higher range precision can be obtained.

Pulse-to-pulse deviation of the absolute range difference at a range of 16 m (a) and probability density function of range precision (b)
4 Summary
To successfully perform various missions, a LADAR system requires high range precision. However, range precision is limited in conventional LADAR systems due to the laser pulse width, the timing resolution of the APD, the timing resolution of the TDC, shot noise and timing jitters generated by electronics. In this paper, for high range precision, a novel technique using a Pockels cell and a QPD was suggested and demonstrated. By changing the polarization state with respect to range, range can be determined by calculating the polarization angle of the laser-return pulse using the four intensities measured by the QPD.
To achieve high range precision in a conventional LADAR system, a higher bandwidth detector and TDC are needed. In contrast, those components are not required in the proposed LADAR system since the proposed system only measures the energy of the laser pulse. Thus, high-performance timing circuitry is unnecessary in the proposed system. In other words, using the proposed configuration, any detector which is able to measure the intensity of a laser pulse can obtain range information without timing circuits. For example, this enables a CCD, a CMOS, a photodiode and so on to be used for LADAR systems. Moreover, the range precision can be further improved by decreasing of the modulation time of the Pockels cell.
The standard deviation measured for the proposed system was 5.7 mm. It is expected that this proposed system will be used for many applications which need high range precision.
References
M. Jaboyedoff, T. Oppikofer, A. Abellán, M.H. Derron, A. Loye, R. Metzger, A. Pedrazzini, Nat. Hazards 61(1), 5–28 (2012)
F. Amzajerdian, M. Vanek, L. Petway, D. Pierrottet, G. Busch, A. Bulyshev, Proc. SPIE 7608, 760828 (2010)
R. Stettner, Proc. SPIE 7684, 768405 (2010)
M. Amann, T. Bosch, M. Lescure, R. Myllyla, M. Rioux, Opt. Eng. 40(1), 10–19 (2001)
F. Blais, J. Electron. Imaging 13(1), 231–243 (2004)
O. Steinvall, T. Chevalier, Proc. SPIE 5988, 598808 (2005)
M.I. Skolnick, RADAR Handbook (McGraw-Hill, New York, 1970)
S. Johnson, T. Nichols, P. Gatt, T.J. Klausutis, Proc. SPIE 5412, 72 (2004)
S. Cain, R. Richmond, E. Armstrong, Appl. Opt. 45, 24 (2006)
M.A. Albota, B.F. Aull, D.G. Fouche, R.M. Heinrichs, D.G. Kocher, R.M. Marino, J.G. Mooney, N.R. Newbury, M.E. O’Brian, B.E. Player, B.C. Willard, J.J. Zayhowski, Linc. Lab. J. 13, 2 (2002)
M. Pfennigbauer, A. Ullrich, Proc. SPIE 7684, 76841F (2010)
S. Johnson, S. Cain, Appl. Opt. 47, 28 (2008)
T.H. Kim, H.J. Kong, S.E. Jo, B.G. Jeon, M.S. Oh, A. Heo, D.J. Park, Rev. Sci. Instrum. 84, 065112 (2013)
S. Pellegrini, G.S. Buller, J.M. Smith, A.M. Wallace, S. Cova, Meas. Sci. Technol. 11, 712 (2000)
J.S. Massa, A.M. Wallace, G.S. Buller, S.J. Fancey, A.C. Walker, Opt. Lett. 22, 543 (1997)
Acknowledgments
This work was supported by the National Research Foundation of Korea (NRF) Grant funded by the Korean Government (MSIP) (No. 2014M1A3A3A03034589).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Jo, S., Kong, H.J., Bang, H. et al. High range precision laser radar system using a Pockels cell and a quadrant photodiode. Appl. Phys. B 122, 143 (2016). https://doi.org/10.1007/s00340-016-6425-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00340-016-6425-9