
Abstract
To maximise fitness, parents should optimise their investment in each breeding attempt. When there are multiple carers, the optimal strategy may also depend on the relative timing of their investment, with coordination of care hypothesised to maximise its efficiency and reduce predation risk. The aim of this study was to test the hypothesis that carers coordinate provisioning as an antipredator measure that reduces the time that a brood’s location is advertised to predators (‘predation hypothesis’). We presented predatory and non-predatory model birds to provisioning long-tailed tit Aegithalos caudatus parents and helpers, predicting that coordination would increase, and carer activity near the nest would decrease following predator presentation, relative to controls. First, carers reduced provisioning rates and took longer to resume provisioning following the predator presentation. Second, contrary to predictions, we found no significant change in any metric of coordination following predator presentations, relative to controls. Moreover, following predator presentation carers spent more time near the nest, resulting in greater near-nest activity compared to controls. In conclusion, although provisioning long-tailed tits are sensitive to perceived predation risk, our findings do not support the prediction of the predation hypothesis that carers adjust coordination behaviour in response to that threat.
Significance statement
Parental care improves offspring condition and is often necessary for their survival but may also confer risk. In birds, provisioning a brood may advertise its location to predators. When multiple individuals provision the same brood, they are hypothesised to coordinate their visits to limit the time that a brood’s location is advertised. This hypothesis has not yet been experimentally tested, so in this study, we investigated whether carers increase their level of provisioning coordination in response to elevated brood predation risk by presenting predatory and non-predatory model birds near 22 long-tailed tit Aegithalos caudatus nests. As anticipated, carers stopped provisioning during predator presentation. However, contrary to expectations, carers did not coordinate more in watches following predator presentation, but instead spent longer near the nest before provisioning, suggesting an increase in risk aversion or vigilance behaviour.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Parental care is any action taken by an individual to directly improve the fitness of their offspring (Trivers 1974; Godfray 1995). However, providing care is costly, so parents must trade-off current investment against potential future productivity and optimise their investment in each breeding attempt to maximise their lifetime reproductive success (Clutton-Brock 1991; Stearns 1992). When offspring are cared for by multiple individuals, this optimisation process must also consider the care provided by others (Houston and Davies 1985; McNamara et al 1999, 2003; Lessells and McNamara 2012). In such systems, the relative timing of carers’ investment may also influence their fitness pay-offs, with groups of coordinated carers hypothesised to receive greater net benefits than carers behaving independently (e.g. Raihani et al 2010; Shen et al 2010; Johnstone et al 2014). For example, strict coordination of care is essential in many pelagic seabirds that have long foraging trips during which their partner must remain at the nest to incubate eggs, brood chicks, and deter predators (Schreiber and Burger 2002; Patrick et al 2020; McCully et al 2022). Similar coordination strategies are observed in many terrestrial birds with biparental incubation (Thomson et al. 1998; Al-Rashidi et al 2010; Boucaud et al 2016), and pairs exhibiting greater incubation coordination experience greater reproductive success (Spoon et al 2006).
Another form of parental coordination, based on conditional cooperation between carers, i.e. taking-turns to deliver food to offspring (hereafter ‘alternation’), has been hypothesised to facilitate conflict resolution between ultimately selfish individuals (Johnstone et al 2014; Savage et al 2017; Johnstone and Savage 2019). By alternating provisioning visits, carers ensure that any individual’s attempt to gain advantage by reducing investment is matched by a similar reduction by the other carer(s), thus preventing would-be defectors from benefiting from the disproportionate effort of others. This enables all carers to more closely achieve their optimal level of care without risking exploitation (Royle et al 2002; McNamara et al 2003) and may explain why some species matched experimental increases in their partner’s provisioning rate (Hinde 2006; Meade et al 2011). However, alternation requires a mechanism by which carers can reliably monitor the investment of others in real-time, particularly if carers forage solitarily (e.g. Savage et al 2017). Synchronous provisioning, another form of coordination, is hypothesised to provide this function (Mariette and Griffith 2015; Bebbington and Hatchwell 2016; Baldan 2019; Baldan and van Loon 2022).
Synchronous nest visits have been reported in several biparental (e.g. Doutrelant and Covas 2007; Lee et al 2010; Mariette and Griffith 2012, 2015; Leniowski and Węgrzyn 2018; Khwaja et al 2019; Lejeune et al 2019) and cooperatively breeding (e.g. Raihani et al 2010; Shen et al 2010; Bebbington and Hatchwell 2016; Koenig and Walters 2016; Halliwell et al 2022) bird species. However, to synchronise provisioning, carers may have to delay the delivery of resources while they wait for another carer to arrive (Ruckstuhl 1999; Dostalkova and Spinka 2007). Therefore, it must provide an adaptive function that confers fitness benefits which outweigh the potential costs. Provisioning synchrony and alternation co-occur in some species (Koenig and Walters 2016; Baldan and Griggio 2019; Ihle et al 2019b; Baldan and Quyang 2020) and are sometimes correlated (Bebbington and Hatchwell 2016; Leniowski and Węgryzn 2018), supporting the contention that synchrony facilitates alternation. However, synchronous provisioning is also hypothesised to have several other potential functions. Synchrony may allow carers to signal effort to conspecifics, either to advertise quality (Zahavi 1977a, b; Doutrelant and Covas 2007) or maintain group membership (Gaston 1978; Kokko et al 2002; Trapote et al 2021). Synchrony may also increase parity in resource partitioning between offspring. For example, if a brood is provisioned twice in quick succession, the chick fed first may be satiated or still processing the food when the second feed is delivered, and thus synchrony may limit the ability of more competitive chicks to monopolise resources (Shen et al 2010; Mariette and Griffith 2012, 2015). Alternatively, synchrony could result from group foraging (Forbes 1993), which may increase foraging efficiency by allowing carers who are less experienced or familiar with the area to use cues from others to inform their foraging decisions, and/or reduce the risk of carers being preyed upon when foraging (Beauchamp 1998; Lee et al 2010; van Rooij and Griffith 2013; Mariette and Griffith 2015; Baldan and van Loon 2022).
Synchrony has also been hypothesised to reduce brood predation risk (‘predation hypothesis’). By provisioning a brood together, carers may reduce the number of discrete feeding events (Skutch 1949), activity near the nest (Martin et al 2000; Bebbington and Hatchwell 2016; Leniowski and Węgrzyn 2018) and/or begging call duration (Haskell 1994; Briskie et al 1999), all of which may advertise the nest location to predators. Several studies have linked provisioning synchrony to reduced activity near a nest (Bebbington and Hatchwell 2016; Leniowski and Węgrzyn 2018) and increased brood survival (Raihani et al 2010; Leniowski and Węgrzyn 2018), but to our knowledge, only one has yet identified a link between synchrony and predation risk. In a multispecies study, Khwaja et al (2019) found that New Zealand bellbirds Anthornis melanura from predator-free island populations synchronised provisioning visits less than mainland populations which historically experienced brood predation. However, in 24 other such intraspecific comparisons, many did not provision synchronously, and in those that did, synchrony did not vary consistently with predation risk (Khwaja et al 2019).
In this study, we investigated the predation hypothesis in a population of long-tailed tits Aegithalos caudatus, a passerine bird that may provision offspring biparentally, or cooperatively when pairs are helped by failed breeders (Glen and Perrins 1988; Hatchwell et al 2004). Helping is a kin-selected behaviour and helpers receive no direct fitness benefits from their cooperative investment, so all carers share a common interest in brood survival (Hatchwell et al 2014). Long-tailed tits coordinate their provisioning via alternation and synchrony, with observed coordination exceeding levels expected by chance (Bebbington and Hatchwell 2016; Halliwell et al 2022), and they behave in a manner that actively enhances their level of coordination (Halliwell et al 2023). Long-tailed tits experience very high rates of nest predation, with 72% of nests failing due to depredation of the eggs or nestlings (Hatchwell et al 2013), usually by corvids e.g. Eurasian jay Garrulus glandarius. So, we conducted an experiment to test whether coordination (i.e. alternation and synchrony) is adjusted in response to elevated predation risk. Specific objectives were: first, to determine whether model predator presentation disturbed the provisioning behaviour of long-tailed tits, predicting that carers would reduce provisioning during periods of acutely elevated perceived predation risk. Secondly, we tested whether increasing perceived predation risk caused an increase in subsequent coordination behaviours, predicting that carers would increase coordination and reduce total time spent near the nest in watches following predator presentation. We also predicted that any adjustment of coordination and nest activity in response to the predator threat would diminish with time following removal of the model predator.
Methods
Study system and general field protocol
Data were collected during the breeding seasons (March–June) of 2021 and 2022 from a population of long-tailed tits in a ~ 3km2 field site in the Rivelin Valley, Sheffield, UK (53°23′N, 1°34′W). Nests were located by following adult birds during nest building, and once located, were monitored at 1–3 day intervals to record lay dates and the start of incubation, with daily checks to record hatch date within 24 h. Brood size was recorded on day 11 (d11) after hatching (d0) when chicks were ringed. Long-tailed tits typically build their nests in low vegetation (< 3 m), but sometimes also in tree forks (> 3 m). Our experimental protocol required model presentation within 2 m of the nest, so we conducted experiments only on nests within reach of an observer (< 2 m) (N = 22). Whilst this restricts our investigation to a subset of potential nest locations, with slightly lower predation risk than average, predation by corvids occurs at a high rate across the full range of nest heights and in all areas of the field site (Hatchwell et al 1999; Higgott 2019), so pairs with low nests should still be sensitive to predator threats. All birds in our study were individually identifiable after being ringed with a British Trust for Ornithology ring and a unique combination of two colour rings either as nestlings in our field site or during nest building if immigrants. In total, 21 breeding females, 20 breeding males and 11 helpers (10 males, 1 female) were observed at 22 nests. Three (5.8%) of 52 carers were subjected to our experiment twice in successive years resulting in a small degree of pseudoreplication. However, in all cases these birds had different partners in the two years, and our analyses were primarily focused on the property of groups (i.e. coordination) rather than that of individuals. Therefore, we believe that any disproportionate effect of this small number of individuals is likely to be minimal. Furthermore, the birds in our field site must regularly encounter predators throughout the year so we believe that brief exposure to a model bird is unlikely to influence their response to the same models 12 months later. Overall, 68% of broods were provisioned biparentally in our sample, with the remainder provisioned cooperatively by parents plus one (23%), or three (9%) alloparental helpers. It was not possible to record data blind because our study involved focal animals in the field.
Experimental protocol
Long-tailed tits provision their brood in the nest from hatching (d0) until failure or fledging (d16–18). Breeding females brood the chicks until around d5, during which time males provide most food, but from d6 onwards brooding ceases and carers provision chicks directly. We conducted experiments on d8–10 at 22 nests (d8: N = 12; d9: N = 6; d10: N = 4) in April–May 2021 and 2022. At each nest, we performed an experiment comprising a series of provisioning watches with intermittent periods of model presentation (Fig. 1). First, an observer (CH) set up a wooden pole (1.2 m tall) for model presentations and a video camera on a tripod ~ 2 m from the nest to record the time, to the nearest second, that each carer fed the brood, before retreating to an observation position > 20 m from the nest. The first watch was a control provisioning period of 1 h which commenced upon the first feed observed after an initial 10-min acclimation period. The observer recorded the time, to the nearest second, that a carer arrived within 15 m of the nest, so that the time between arrival and feeding, termed the ‘loitering period’, could be calculated. If two or more carers arrived simultaneously, they were recorded as arriving at the same time, but the observer noted the order in which they were identified. Some arrivals did not result in feeds (4.69%, N = 1,561) so were omitted from our final analysis. In addition, some arrivals (4.03%, N = 1,491) were missed, in which case the time of arrival was assumed to be the time first seen on camera; the longer a carer loitered the lower the chance that their arrival was missed, so we reasoned that missed arrivals would typically occur with short loitering periods. Watches were performed for one hour after the first observed feed, and watch duration was calculated as the time between first arrival and final feed.

Illustration of the experimental protocol and models used: rock dove (Columba livia) (left) and Eurasian jay (Garrulus glandarius) (right). Treatment model illustrations by SC Anderson
Following the control period, the observer fixed the first taxidermic model atop the pole before retreating to the same observation position. The model was either a non-predatory (rock dove, Columba livia) or predatory (Eurasian jay) bird; jays commonly depredate long-tailed tit eggs and chicks, but not adults. The first model was presented for ~ 15 min (dove mean (± SE): 15 min 19 s ± 6 s, N = 22; jay mean (± SE): 15 min 22 s ± 8 s, N = 22), while the observer and video camera recorded arrival and feed times to the nearest second. Although we did not systematically quantify other behaviours during this period, carers usually responded to the jay by intensely alarm-calling and mobbing the model before retreating from the nest area. In contrast, during the dove presentation, carers alarm-called less and rarely mobbed the model, often resuming provisioning within 2 min of the presentation. After 15 min the observer retrieved and concealed the model before returning to the same observation position to perform another 1 h provisioning watch. The observer then repeated the presentation procedure and subsequent observation period for the other model. All watches at a focal nest were performed on the same day, back-to-back, with minimal breaks between watch periods and the next model presentation. Each experiment typically lasted 4–5 h. The order of model presentations was stratified to minimise confounding order effects in model treatment (dove first: N = 10 trials; jay first: N = 12 trials). Nevertheless, our experimental design resulted in a potential order effect because the control period necessarily preceded the model presentations to avoid any impact of model presentations on the non-presentation control period. To assess the impact of this, we analysed the effect of watch order (including non-presentation controls) on each of our investigated metrics, finding no significant effect of watch order, nor any change in significance of the key terms with or without the inclusion of the watch order term (Table S1). Therefore, final analyses reported in the paper did not include presentation order.
Due to resource constraints, we presented the same predatory and non-predatory models at each nest, so the responses of each group to our treatment were not truly independent as they responded to the same individual models, introducing a degree of potential pseudoreplication (Milinski 1997). Therefore, we cannot rule out the possibility that carers’ responses were influenced by the unique individual characteristics of our chosen models as well as differences between the predatory and non-predatory species overall; though, we believe that this effect should be very small when presenting taxidermic models. Further, our protocol is in line with similar studies presenting the same model(s) to different subjects (e.g. Giles and Huntingford 1984; Ghalambor and Martin 2000, 2002; Peluc et al. 2008). Therefore, we think it is safe to assume that our predatory and non-predatory models were a fair representation of the predation threat exhibited by jays and doves.
Calculating coordination
Effect of experimental treatments on provisioning behaviour
To establish whether model presentations disturbed regular provisioning behaviour, we first calculated the time between the removal of each model (dove or jay) and the first feed by any carer during the subsequent watch, termed the ‘Lag time’ (Fig. 1). Secondly, we calculated the ‘Number of feeds’ by all carers during control watches, during model presentation periods (dove or jay present) and in watches following model removal (post-dove and post-jay). This was analysed as the total number of feeds per watch, which functioned as a measure of provisioning rate when watch duration was included in the model.
Does predation threat increase coordination?
To test the prediction that carers increase their coordination in response to elevated predation risk, we calculated provisioning and coordination metrics by all carers during control watches and post-dove and post-jay watches, as follows. ‘Alternation’ – the number of alternated feeds, defined as the number of feeds that occurred following the feed of another carer, i.e. non-consecutive feeds (e.g. A-B-A-C-B) (median = 16, range = 3–37, N = 66 watches at 22 nests). ‘Arrival synchrony’ – the number of synchronised arrivals, defined as the number of arrivals that occurred within a time window of 2 min following an arrival by another carer (median = 10, range = 1–30, N = 66). ‘Feed synchrony’ – the number of synchronised feeds, defined as the number of feeds that occurred within a 2-min time window of a feed by another carer (median = 10, range = 1–30, N = 66). Previous studies of long-tailed tits found that levels of synchrony between 1-, 2-, and 3-min window lengths were highly correlated (rp > 0.94; Halliwell et al 2022) and studies of long-tailed tits and other species with comparable provisioning rates found qualitatively similar results for different synchrony windows (Mariette and Griffith 2015; Bebbington and Hatchwell 2016; Ihle et al 2019a; Halliwell et al 2022), with 2 min being most widely used. Therefore, 2 min was chosen to ensure that our methods were consistent and comparable with previous studies of coordination in long-tailed tits. ‘Present upon arrival’ – the number of feeds where the focal carer arrived back within 15 m of the nest with another carer loitering nearby (median = 6, range = 0–24, N = 66). ‘Present upon feed’ – the number of feeds where the focal carer fed whilst another carer loitered nearby (median = 5, range = 0–24, N = 66). ‘Loitering time’ – the mean loitering period duration by all carers who provisioned the brood during a watch (mean (± SE) = 45.8 s ± 3.8 s, N = 66) and ‘Duration of time with carer(s) nearby’ – the total time during each watch where one or more carers loitered within 15 m of a nest (mean (± SE) = 11 min 54 s ± 36 s, N = 66); when watch duration was included as a covariate this measure functioned as an analysis of the proportion of a watch where at least one carer was loitering nearby.
To further test the dynamics of any potential response to predation threats, we compared several metrics of carer behaviour between sub-sections of control watches and post-dove and post-jay watches, each split into thirds by watch duration (mean third duration (± SE) = 18 min 47 s ± 8 s, N = 198); response variables were: ‘Number of feeds’ (provisioning rate), ‘Loitering time’, and the levels of each coordination metric (‘Arrival synchrony’, ‘Present upon arrival’, ‘Present upon feed’, ‘Feed synchrony’, ‘Alternation’). This analysis attempted to determine the time frame on which carers adjusted their provisioning behaviour in response to elevated predation risk.
Statistical analysis
All statistical analyses were performed in R version 4.2.1 (R Core Team 2022). All models were built using lme4 (Bates et al 2015) and P values extracted using lmerTest (Kuznetsova et al 2017). Where appropriate, we used the package emmeans (Lenth et al 2019) to perform post hoc testing. Figures were produced using the packages ggplot2 (Wickham 2016), cowplot (Wilke 2020) and ggsignif (Ahlmann-Eltze and Patil 2021). Our general approach to analyses was to use full mixed effects models with all biologically relevant fixed and random effects. To confirm that our findings were not influenced by overparameterisation of these models, we also conducted analyses of the same dataset using stepwise elimination of non-significant terms and an information theoretic (AIC) approach, but results were very consistent between these methods (see online resource details, Table S3). Therefore, here we present only the results of full mixed effect models.
Effect of experimental treatments on provisioning behaviour
To determine whether model presentation treatments affected provisioning behaviour, we first built a normally distributed linear mixed effects model (LMM) to compare the lag time between model removal and the first subsequent feed for dove and jay treatments. The response variable was log-transformed ‘Lag time’ because the assumption of normality was met only when the response variable was appropriately transformed. This model’s term of interest was ‘Treatment’ (post-dove or post-jay), with the fixed effects covariates as follows. ‘Provisioning rate’ – the total number of feeds by all carers per hour in the watch following model removal (in this case: mean (± SE) = 25.09 feeds/h ± 1.33, range = 7.94–46.42, N = 44). ‘Carer number’ – the number of unique carers which provisioned during each watch following model removal (in this case: 2: 70.5%, 3: 20.5%, 4: 2.3% and 5: 6.8%; N = 44). ‘Brood size’ – the number of live chicks recorded in the nest on d11 (median = 9, range = 2–11, N = 22). ‘Watch start time’ – the time of day each experiment started (mean = 08:30 BST, range = 07:20–12:40, N = 22). ‘Brood age’ – the number of days since hatching upon which a watch was performed (d8: N = 12; d9: N = 6; d10: N = 4). Finally, ‘Hatch date’ – the number of days since March 1 of each year on which each brood hatched (median = April 30, range = April 19 – May 29, N = 22). Random effects were ‘Year’ and ‘Nest ID’ – a unique identifier for each nest. Detailed descriptions of all fixed and random effects are available in Table S2 (online resource). Secondly, we built a Poisson-distributed generalised linear mixed effects model (GLMM) to compare provisioning rates during control watches, model presentations, and watches following model removal (post-dove and post-jay). The response variable was ‘Number of feeds’ and the term of interest was ‘Treatment’ (control, dove present, jay present, post-dove or post-jay) with fixed effect covariates as follows: ‘Carer number’ – for provisioning watches, this was the number of carers that provisioned during each watch (in this case: 2: 69.7%, 3: 21.2%, 4: 3.0% and 5: 6.1%; N = 66); for model presentation periods, this was the maximum number of carers observed provisioning the nest during the experiment (2: 68.2%, 3: 22.7%, 4: 0.0%, 5: 9.1%; N = 22), ‘Watch duration’ – the time, in minutes, between first arrival and last feed of each watch (including display periods: mean (± SE) = 41 min 18 s ± 125 s, N = 110), ‘Brood size’, ‘Watch start time’, ‘Brood age’ and ‘Hatch date’, as above. Random effects were ‘Year’, ‘Nest ID’ and ‘Rowref’, which was an observation level random effect providing a unique identifier for each provisioning watch; included throughout to account for overdispersion in Poisson-distributed models.
Does predation threat increase coordination?
To test the prediction that carers increased coordination in response to a perceived predation threat, we first produced a series of Poisson-distributed GLMMs to compare coordination metrics between control watches and watches following model presentations. The response variables were as follows: ‘Arrival synchrony’, ‘Present upon arrival’, ‘Present upon feed’, ‘Feed synchrony’ and ‘Alternation’, as described above, with ‘Treatment’ (control, post-dove or post-jay) being the term of interest in each model. Fixed effect covariates for these models were: ‘Provisioning rate’ (in this case: mean (± SE) = 22.94 feeds/h ± 1.06, range = 7.94–46.42, N = 66), ‘Carer number’, ‘Watch duration’ (in this case: mean (± SE) = 58 min 36 s ± 48 s, N = 66), ‘Brood size’, ‘Watch start time’, ‘Brood age’, ‘Hatch date’ and ‘Maximum possible alternation’ – a variable that reflects the disparity in provisioning rate within groups of carers, e.g. if two carers feed at the same rate, all feeds (except the first) are potentially alternated, but if one carer feeds more than all others combined there exist several feeds which cannot be alternated (mean (± SE) = 87.80% ± 1.34%). Therefore, this variable represents the percentage of visits performed during a watch which could theoretically be alternated (or synchronised) given the relative number of feeds by all carers during that watch (see Table S2 for further details). Random effects were ‘Year’, ‘Nest ID’ and ‘Rowref’.
Secondly, to test whether treatment influenced loitering times and consequently the total time that carers were nearby the nest, we built two normally distributed LMMs. The response variables were log-transformed ‘Loitering time’ and ‘Duration of time with carer(s) nearby’, with the term of interest being ‘Treatment’ (control, post-dove or post-jay). Fixed effect covariates were: ‘Provisioning rate’, ‘Carer number’, ‘Watch duration’, ‘Brood size’, ‘Watch start time’, ‘Brood age’ and ‘Hatch date’. Additionally, to further investigate the time during a watch with carer(s) nearby we re-ran the original model with mean loitering time included as a covariate to account for the effect of potentially different loitering times during different watches; we report both model outputs. Random effects were ‘Year’, ‘Nest ID’ and ‘Rowref’.
As the final test of this hypothesis, we used a series of Poisson-distributed GLMMs to compare ‘Provisioning rate’ and coordination metrics between successive Sects. (1st, 2nd, and 3rd) of control watches and watches following model removal. The response variables were: ‘Number of feeds’, ‘Arrival synchrony’, ‘Present upon arrival’, ‘Present upon feed’, ‘Feed synchrony’, ‘Alternation’ and ‘Loitering time’, with the terms of interest being ‘Section’ and its interaction term with ‘Treatment’, which measures whether watches exposed to different treatments varied in their subsequent coordination through time. Fixed effect covariates were: ‘Provisioning rate’, ‘Carer number’, ‘Watch duration’, ‘Brood size’, ‘Watch start time’, ‘Brood age’, ‘Hatch date’ and ‘Maximum possible alternation’ (except the provisioning rate and loitering time models), which was calculated for each individual section of the watch, i.e. ‘Maximum possible alternation’ for 1st, 2nd, and 3rd sections separately. Random effects were ‘Year’, ‘Nest ID’, ‘Rowref’ and ‘Watch ID’ – a unique identifier for each watch from which a section was sampled.
Results
Effect of experimental treatments on provisioning rates
Presentation of a model predator had the anticipated effect of disturbing provisioning behaviour. First, the time between removal of the models and the first subsequent feed by any carer was significantly longer after the jay presentation than after the dove (LMM: P < 0.001, Table 1, Fig. 2a). Second, there were significant differences in provisioning rates for the two treatments during model presentation periods and following model removal (LMM: P < 0.001, Table 1, Fig. 2b). Overall, only 5.8% (3/52) of carers fed during presentation of the jay, whereas 51.9% (27/52) fed during dove presentation. Thus, provisioning rate was significantly lower during the jay presentation than during the dove presentation (Tukey’s HSD: P < 0.001), which in turn was significantly lower than provisioning rate during the preceding control period (Tukey’s HSD: P < 0.001). Interestingly, post-jay provisioning rate was significantly higher than post-dove (Tukey’s HSD: P < 0.001), which in turn was higher than during control watches (Tukey’s HSD: P < 0.001). These results show that the jay presentation had the anticipated negative effect on provisioning behaviour relative to the dove, and provisioning rates during subsequent watches suggest that there was some compensation for reduced provisioning during model presentations, especially following presentation of the jay (Fig. 2b).

The lag time (in minutes) between model removal and the first feed during the subsequent watch for the dove (N = 22) and jay (N = 22) treatments. (b) Provisioning rate (feeds per hour) when dove or jay were present, during control watches and watches following model presentation (post-dove and post-jay) (N = 22 watches per treatment). Central emboldened lines are median values. Lower and upper boundaries of boxes are lower and upper quartile values, respectively. Upper and lower boundaries of tails are maximum and minimum observed values within upper (3rd quartile + 1.5 * interquartile range) and lower fence (1.st quartile – 1.5 * interquartile range), respectively. Points are outliers (values outside of fence range). Significance indicators from Tukey’s HSD post-hoc analysis: *** = P < 0.001
Does predation threat increase coordination?
To investigate whether a model predator affected coordination, we compared coordination levels in control watches and watches following experimental treatments. We found no significant difference between control, dove and jay treatments in any metric of coordination: arrival synchrony (GLMM: P = 0.888, Table 2, Fig. 3a), loitering period overlap (Present upon arrival GLMM: P = 0.252, Table 2; Present upon feed GLMM: P = 0.229, Table 2, Fig. 3b), feed synchrony (GLMM: P = 0.965, Table 2, Fig. 3c) or alternation (GLMM: P = 0.641, Table 2, Fig. 3d). We note that Figs. 3a and b appear to show less synchrony during control watches, although the models did not identify such an effect (Table 2). This is because the level of synchrony inevitably increases with provisioning rate which was higher following model presentation (Fig. 2). The models control for this effect, but the Figs. do not.

Percentages of: (a) arrivals synchronised, (b) feeds where the focal carer fed with another carer nearby, (c) feeds synchronised, and (d) feeds alternated, in control watches and watches following model presentation (post-dove and post-jay) (N = 22 watches per treatment). Central emboldened lines are median values. Lower and upper boundaries of boxes are lower and upper quartile values, respectively. Upper and lower boundaries of tails are maximum and minimum observed values within upper (3rd quartile + 1.5 * interquartile range) and lower fence (1.st quartile – 1.5 * interquartile range), respectively. Points are outliers (values outside of fence range). Significance indicators from Tukey’s HSD post-hoc analysis: N.S. = P > 0.05
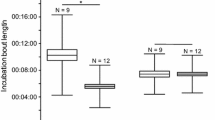
To examine whether perceived predation threat affected loitering behaviour, we first compared loitering times during control watches and watches following model presentations. The mean duration of loitering periods differed significantly between treatments (LMM: P = 0.006, Table 3, Fig. 4a), being significantly longer in post-jay watches than post-dove (Tukey’s HSD: P = 0.013). In contrast, there was no significant difference in mean loitering times during control watches and watches post-dove (Tukey’s HSD: P = 0.105) or post-jay (Tukey’s HSD: P = 0.732). We then tested whether an increase in perceived predation threat reduced parental activity near nests. The time that one or more carers was present near the nest differed significantly between treatments (LMM: P = 0.009, Table 3, Fig. 4b), but contrary to expectations, post-jay watches had a higher carer presence than post-dove watches (Tukey’s HSD: P = 0.022). This result appears to be a direct consequence of the increased time that carers spent loitering near the nest following the jay treatment rather than a change in loitering period overlap, because when mean loitering time was included in the model, this variable (LMM: P < 0.001, Table 3), rather than treatment (LMM: P = 0.067, Table 3) predicted the time that one or more carers spent near the nest.

Log-transformed mean loitering times, and (b) percentage of a watch where at least one carer was loitering nearby, for control watches and watches following model presentation (post-dove and post-jay) (N = 22 watches per treatment). Central emboldened lines are median values. Lower and upper boundaries of boxes are lower and upper quartile values, respectively. Upper and lower boundaries of tails are maximum and minimum observed values within upper (3rd quartile + 1.5 * interquartile range) and lower fence (1.st quartile – 1.5 * interquartile range), respectively. Points are outliers (values outside of fence range). Significance indicators from Tukey’s HSD post-hoc analysis: N.S. = P > 0.05, * = 0.05 ≥ P > 0.01
To further understand the dynamics of carers’ adjustments to their provisioning behaviour in response to predators, we investigated whether provisioning rate, coordination and loitering times varied through watches when split into three sections. Firstly, provisioning rate generally increased through watches (LMM: P = 0.002, Table 4, Fig. 5a), although this effect did not differ between treatments as evidenced by the absence of a significant interaction term between section and treatment (LMM: P = 0.234, Table 4). Secondly, there was no significant difference between sections in the levels of arrival synchrony (GLMM: P = 0.143, Table 4), loitering period overlap (Present upon feed GLMM: P = 0.953, Table 4; Present upon arrival GLMM: P = 0.855, Table 4) or feed synchrony (GLMM: P = 0.158, Table 4, Fig. 5b). However, there was a significant difference in alternation between sections (GLMM: P = 0.037, Table 4, Fig. 5c), but with no effect of treatment (GLMM: P = 0.999, Table 4). Contrary to the prediction of the predation hypothesis, alternation was significantly lower in the first third of a watch (Tukey’s HSD: 1st–2nd, P = 0.033) suggesting that disturbance associated with camera set up and model presentation may have inhibited coordination for a brief time. Finally, mean loitering time was significantly influenced by the interaction of watch type and section (LMM: P = 0.042, Table 4, Fig. 5a), meaning that the variation in loitering time between Sects. (1st, 2nd, or 3rd) of a watch depended on whether it was a control, post-dove, or post-jay watch. This effect was seemingly driven by the fact that in both control and post-jay watches, loitering times were significantly longer in the first third (Tukey’s HSD: 1st–2nd Control, P = 0.013; 1st–3rd Control, P < 0.001; 1st–2nd jay, P < 0.001; 1st–3rd jay, P < 0.001), whereas in post-dove watches there was no difference between thirds (Tukey’s HSD: 1st–2nd, P = 0.862; 1st–3rd, P = 0.838). These results suggest that initial set up of the experiment may have induced a brief change in provisioning behaviour, though to a lesser extent than the predator presentation.

Provisioning rate (feeds per hour), (b) percentage of feeds synchronised, (c) percentage of feeds alternated, and (d) log-transformed mean loitering time between thirds (1st blue, 2nd orange and 3rd green) of control watches and watches following model presentation (post-dove and post-jay) (N = 22 watches per treatment). Central emboldened lines are median values. Lower and upper boundaries of boxes are lower and upper quartile values, respectively. Upper and lower boundaries of tails are maximum and minimum observed values within upper (3rd quartile + 1.5 * interquartile range) and lower fence (1.st quartile – 1.5 * interquartile range), respectively. Points are outliers (values outside of fence range)
Discussion
In this study, we presented a model predator (jay) and non-predator (dove) near the nests of provisioning long-tailed tits to test whether carers actively increased their behavioural coordination in response to elevated predator threat. Almost all carers completely ceased provisioning during predator presentation and took significantly longer to resume feeding following removal of the predator than the non-predator (Fig. 2), suggesting an acute anti-predator adjustment in provisioning behaviour. However, contrary to expectations, carers did not increase coordination in response to predator treatment, relative to the control period or non-predator treatment (Fig. 3). Furthermore, the proportion of time that at least one carer was present near the nest was higher following the predator than the non-predator treatment (Fig. 4b) because of longer loitering periods following the predator treatment (Fig. 4a). Surprisingly, rates of alternation decreased in the first period of a watch (Fig. 5c), suggesting that disturbance may interrupt patterns of coordination even for control watches. Overall, we found no support for the prediction that carers would increase coordination in response to elevated perceived predation risk.
Previous studies have demonstrated that more synchronous pairs exhibited lower activity near the nest per provisioning visit (Bebbington and Hatchwell 2016; Leniowski and Węgryzn 2018) and suffered lower rates of brood failure (Raihani et al 2010; Leniowski and Węgryzn 2018). Circumstantial evidence in support of the predation hypothesis was also reported in New Zealand bellbirds (Khwaja et al 2019). However, to our knowledge no prior study has experimentally manipulated perceived predation risk to directly test whether parents adjust their coordination of care in response. Therefore, our aim was to experimentally test the hypothesis that carers coordinate provisioning visits as an anti-predator measure to reduce carer activity near the nest, thus limiting the time that the nest location is advertised to predators. We anticipated that the presentation of a model predator close to nests would elevate carers’ perception of predation risk, and that coordination would be elevated in watches following predator presentation before declining with time since model presentation. However, despite the high rate of nest predation experienced by long-tailed tits (72%; Hatchwell et al 2013) and a clear response to the model jay, carers did not increase their synchrony, or any associated metric of coordination. While we found no evidence of facultative adjustment of coordination in response to an elevated predation risk, this does not necessarily mean that synchrony has no function in reducing predation risk. Long-tailed tits may experience a near constant risk of predation and their coordination of care (Halliwell et al 2022, 2023) may be an evolved response to that threat. Therefore, it would be interesting to investigate whether broods fed by better coordinated groups of carers are more likely to survive than those provisioned by poorly coordinated carers.
Our conclusion that long-tailed tits did not adjust coordination as an anti-predator strategy contrasts with our finding on provisioning rates. There was an almost complete cessation of provisioning during presentation of a model predator and for a period following its removal. This response shows that our manipulation had the anticipated effect on perceived predation risk and is similar to previous studies reporting reduced provisioning rates in response to predator threats (Lima and Dill 1990; Peluc et al 2008; Ghalambor et al 2013; Dorset et al 2017). We anticipated that carer activity near the nest would decrease during watches following predator treatment. However, once feeding resumed, provisioning rates were elevated following the predator treatment, an effect we attribute to compensation for the prolonged period (~ 25 min) when provisioning ceased. This result is consistent with a previous study of this species that found higher provisioning rates in response to experimental increases in perceived brood demand (Meade et al 2011). We also found that the duration of loitering periods was longer following the predator than the non-predator presentation, presumably because carers were more risk averse or vigilant when close to the nest, as reported in house wrens Troglodytes aedon (Dorset et al 2017). Higher provisioning rates and longer loitering periods led to at least one carer being present near the nest for longer following presentation of the predator than the non-predator. This result was contrary to the prediction that carers would respond to elevated predation risk by reducing activity near the nest, mediated by an increase in coordination (Raihani et al 2010; Bebbington and Hatchwell 2016; Leniowski and Węgrzyn 2018).
One explanation for these results is that rather than reduce their time near the nest in response to a predator, carers instead are more cautious about provisioning the brood. If being witnessed provisioning compromises brood safety more than simply being witnessed near the nest, then carers may increase vigilance rather than adjusting coordination. Ultimately, this depends on whether nest locations are typically revealed by provisioning visits directly (Skutch 1949) or by activity near the nest (Martin et al 2000) and associated offspring begging (Haskell 1994; Briskie et al 1999). Which of these is the dominant driver of nest advertisement is unknown in long-tailed tits. Alternatively, the longer loitering periods following the predator treatment could reflect an increased attentiveness for potential nest defence (Montgomerie and Weatherhead 1988; Kleindorfer et al 2005). The small size of long-tailed tits relative to predators (long-tailed tit 7–8 g vs Eurasian Jay 140–180 g; Snow et al 1998) means they are incapable of physically deterring corvids. However, carers may still be able to distract predators as a last resort, and they often approached the model predator closely, mobbing it with frequent alarm-calls. Such behaviour could function as an instruction to the chicks to stop begging (Greig-Smith 1980; Knight and Temple 1986) and the prolonged loitering periods following predator presentation could, therefore, result from chicks continuing to beg less than during control treatments. However, we know little about vocal communication between parents and nestlings in this species, so this explanation is speculative.
In addition to testing the predator hypothesis for parental coordination, our results are potentially informative about the utility of randomisation approaches that test whether coordination occurs more than expected by chance. Several studies have used randomisation approaches to demonstrate higher than expected levels of alternation and synchrony (e.g. Johnstone et al 2014; Savage et al 2017; Halliwell et al 2022). However, alternative explanations have been suggested (Schlicht et al 2016; Ihle et al 2019a; Santema et al 2019), specifically, that a common response by all carers to acute (e.g. predator disturbance) or chronic changes (e.g. weather) may cause temporal autocorrelation between carers’ intervisit intervals. Randomisation of these temporally autocorrelated intervisit intervals may therefore underestimate expected coordination (Schlicht et al 2016; Ihle et al 2019a; Santema et al 2019) and hence increase the probability that observed coordination will appear higher than expected. Our results appear to corroborate this critique given that 94% (49/52) of carers ceased provisioning during model predator presentation. However, we also note that alternation was lowest immediately following a period of disturbance, suggesting that long-tailed tits are best able to coordinate their care when undisturbed for long periods. Furthermore, alternation was also lowest in the first third during control watches, suggesting that the disturbance caused by observers may also disrupt coordination. Thus, the extent of behavioural coordination may be underestimated even if no predator is encountered during a watch. Therefore, whilst we agree that acute and chronic changes in conditions during provisioning watches may cause underestimation of apparent coordination by randomisation approaches (Schlicht et al 2016; Ihle et al 2019a; Santema et al 2019), we also highlight that any disturbance may likewise limit the scope for detecting behavioural coordination. We suggest that this possibility should be considered when quantifying coordination from observational data.
In conclusion, our results did not support the hypothesis that carers coordinate provisioning to reduce predation risk, as we found no change in coordination following predator treatment, relative to controls. Nevertheless, we cannot rule out the hypothesis that synchrony is an adaptation to reduce brood predation, as carers may perform a fixed level of coordination which is not adjusted in response to variable predation risk. Whilst carers responded to predator treatment by ceasing provisioning, surprisingly alternation decreased in the period immediately following disturbance, suggesting that disturbance temporarily interrupted provisioning coordination. We detected some limited response to predator threat as carers increased their loitering time in the period immediately following predator treatment, which we suggest may be caused by increased risk aversion or vigilance following predator exposure. Finally, we suggest that further investigation into the link between coordination and brood survival is necessary to fully examine the brood predation hypothesis for coordinated care.
Data availability
The datasets generated during and/or analysed during the current study are available in the Dyrad repository, https://doi.org/10.5061/dryad.cc2fqz69z.
References
Ahlmann-Eltze C, Patil I (2021) ggsignif: R package for displaying significance brackets for 'ggplot2', https://CRAN.R-project.org/package=ggsignif
Al-Rashidi M, Kosztolányi A, Küpper C, Cuthill IC, Javed S, Székely T (2010) The influence of a hot environment on parental cooperation of a ground-nesting shorebird, the Kentish plover Charadrius alexandrinus. Front Zool 7:1. https://doi.org/10.1186/1742-9994-7-1
Baldan D, Griggio M (2019) Pair coordination is related to later brood desertion in a provisioning songbird. Anim Behav 156:147–152. https://doi.org/10.1016/j.anbehav.2019.08.002
Baldan D, Quyang JQ (2020) Urban resources limit pair coordination over offspring provisioning. Sci Rep 10:15888. https://doi.org/10.1038/s41598-020-72951-2
Baldan D, van Loon EE (2022) Songbird parents coordinate offspring provisioning at fine spatio-temporal scales. J Anim Ecol 91:1316–1326. https://doi.org/10.1111/1365-2656.13702
Baldan D (2019) Resolving sexual conflict: Behavioural mechanisms underlying parental coordination. Dissertation, Wageningen University and Research
Bates D, Mächler M, Bolker B, Walker S (2015) Fitting linear mixed-effects models using lme4. J Stat Softw 67:1–48. https://doi.org/10.48550/arXiv.1406.5823
Beauchamp GUY (1998) The effect of group size on mean food intake rate in birds. Biol Rev 73:449–472. https://doi.org/10.1017/S0006323198005246
Bebbington K, Hatchwell BJ (2016) Coordinated parental provisioning is related to feeding rate and reproductive success in a songbird. Behav Ecol 27:652–659. https://doi.org/10.1093/beheco/arv198
Boucaud ICA, Mariette MM, Villain AS, Vignal C (2016) Vocal negotiation over parental care? Acoustic communication at the nest predicts partners’ incubation share. Biol J Linn Soc 117:322–336
Briskie JV, Martin PR, Martin TE (1999) Nest predation and the evolution of nestling begging calls. Proc R Soc Lond B 266:2153–2159. https://doi.org/10.1098/rspb.1999.0902
Clutton-Brock TH (1991) The costs of breeding. In: Clutton-Brock TH (ed) The Evolution of Parental Care. Princeton University Press, Princeton, NJ, pp 31–47
Dorset EE, Sakaluk SK, Thompson CF (2017) Behavioral plasticity in response to perceived predation risk in breeding house wrens. Evol Biol 44:227–239. https://doi.org/10.1007/s11692-016-9402-7
Dostalkova I, Spinka M (2007) Synchronization of behaviour in pairs: the role of communication and consequences in timing. Anim Behav 74:1735–1742. https://doi.org/10.1016/j.anbehav.2007.04.014
Doutrelant C, Covas R (2007) Helping has signalling characteristics in a cooperatively breeding bird. Anim Behav 74:739–747. https://doi.org/10.1016/j.anbehav.2006.11.033
Forbes LS (1993) Avian brood reduction and parent–offspring ‘conflict.’ Am Nat 142:82–117. https://doi.org/10.1086/285530
Gaston AJ (1978) The evolution of group territorial behavior and cooperative breeding. Am Nat 112:1091–1100. https://doi.org/10.1086/283348
Ghalambor CK, Martin TE (2000) Parental investment strategies in two species of nuthatch vary with stage-specific predation risk and reproductive effort. Anim Behav 60:263–267. https://doi.org/10.1006/anbe.2000.1472
Ghalambor CK, Martin TE (2002) Comparative manipulation of predation risk in incubating birds reveals variability in the plasticity of responses. Behav Ecol 13:101–108. https://doi.org/10.1093/beheco/13.1.101
Ghalambor CK, Peluc SI, Martin TE (2013) Plasticity of parental care under the risk of predation: how much should parents reduce care? Biol Lett 9:20130154. https://doi.org/10.1098/rsbl.2013.0154
Giles N, Huntingford FA (1984) Predation risk and inter-population variation in antipredator behaviour in the three-spined stickleback, Gasterosteus aculeatus L. Anim Behav 32:264–275. https://doi.org/10.1016/S0003-3472(84)80346-2
Glen NW, Perrins CM (1988) Cooperative breeding by long-tailed tits. Brit Birds 81:630–641
Godfray HCJ (1995) Evolutionary theory of parent-offspring conflict. Nature 376:133–138. https://doi.org/10.1038/376133a0
Greig-Smith PW (1980) Parental investment in nest defence by stonechats (Saxicola torquata). Anim Behav 28:604–619. https://doi.org/10.1016/S0003-3472(80)80069-8
Halliwell C, Beckerman AP, Germain M, Patrick SC, Leedale AE, Hatchwell BJ (2022) Coordination of care by breeders and helpers in the cooperatively breeding long-tailed tit, Aegithalos caudatus. Behav Ecol 33:844–858. https://doi.org/10.1093/beheco/arac048
Halliwell C, Beckerman AP, Biddiscombe SJ, Germain M, Hatchwell BJ (2023) Coordination of care is facilitated by delayed feeding and collective arrivals in the long-tailed tit. Anim Behav 201:23–44. https://doi.org/10.1016/j.anbehav.2023.04.005
Haskell D (1994) Experimental evidence that nestling begging behavior incurs a cost due to nest predation. Proc R Soc Lond B 257:161–164. https://doi.org/10.1098/rspb.1994.0110
Hatchwell BJ, Russell AF, Fowlie MK, Ross DJ (1999) Reproductive success and nest-site selection in a cooperative breeder: effect of experience and a direct benefit of helping. Auk 116:355–363. https://doi.org/10.2307/4089370
Hatchwell BJ, Russell AF, MacColl ADC, Ross DJ, Fowlie MK, McGowan A (2004) Helpers increase long-term but not short-term productivity in cooperatively breeding long-tailed tits. Behav Ecol 15:1–10. https://doi.org/10.1093/beheco/arg091
Hatchwell BJ, Sharp SP, Beckerman AP, Meade J (2013) Ecological and demographic correlates of helping behaviour in a cooperatively breeding bird. J Anim Ecol 82:486–494. https://doi.org/10.1111/1365-2656.12017
Hatchwell BJ, Gullett PR, Adams MJ (2014) Helping in cooperative breeding long-tailed tits: a test of Hamilton’s rule. Phil Trans R Soc B 369:20130565. https://doi.org/10.1098/rstb.2013.0565
Higgott CG (2019) Evolutionary ecology of avian nest design and function in a variable environment. PhD thesis, University of Sheffield, Sheffield, UK
Hinde CA (2006) Negotiation over offspring care? - a positive response to partner-provisioning rate in great tits. Behav Ecol 17:6–12. https://doi.org/10.1093/beheco/ari092
Houston AI, Davies NB (1985) The evolution of cooperation and life history in the Dunnock, Prunella modularis. In: Sibly RM, Smith RH (eds) Behavioural Ecology: ecological consequences of adaptive behaviour. Blackwell Scientific Publications, Oxford, UK, pp 471–487
Ihle M, Pick JL, Winney IS, Nakagawa S, Burke T (2019) Measuring up to reality: null models and analysis simulations to study parental coordination over provisioning offspring. Front Ecol Evol 7:142. https://doi.org/10.3389/fevo.2019.00142
Ihle M, Pick JL, Winney IS, Nakagawa S, Schroeder J, Burke T (2019) Rearing success does not improve with apparent pair coordination in offspring provisioning. Front Ecol Evol 7:405. https://doi.org/10.3389/fevo.2019.00405
Johnstone RA, Savage JL (2019) Conditional cooperation and turn-taking in parental care. Front Ecol Evol 7:335. https://doi.org/10.3389/fevo.2019.00335
Johnstone RA, Manica A, Fayet AL, Stoddard MC, Rodriguez-Gironés MA, Hinde CA (2014) Reciprocity and conditional cooperation between great tit parents. Behav Ecol 25:216–222. https://doi.org/10.1093/beheco/art109
Khwaja N, Massaro M, Martin TE, Briskie JV (2019) Do parents synchronise nest visits as an antipredator adaptation in birds of New Zealand and Tasmania? Front Ecol Evol 7:389. https://doi.org/10.3389/fevo.2019.00389
Kleindorfer S, Fessl B, Hoi H (2005) Avian nest defence behaviour: assessment in relation to predator distance and type, and nest height. Anim Behav 69:307–313. https://doi.org/10.1016/j.anbehav.2004.06.003
Knight RL, Temple SA (1986) Nest defence in the American goldfinch. Anim Behav 34:887–897. https://doi.org/10.1016/S0003-3472(86)80075-6
Koenig WD, Walters EL (2016) Provisioning patterns in the cooperatively breeding acorn woodpecker: does feeding behavior serve as a signal? Anim Behav 119:125–134. https://doi.org/10.1016/j.anbehav.2016.06.002
Kokko H, Johnstone RA, Wright J (2002) The evolution of parental and alloparental effort in cooperative breeding groups: when should helpers pay to stay. Behav Ecol 13:291–300. https://doi.org/10.1093/beheco/13.3.291
Kuznetsova A, Brockhoff PB, Christensen RHB (2017) Package: tests in linear mixed effects models. J Stat Softw 82:1–26. https://doi.org/10.18637/jss.v082.i13
Lee JW, Kim HY, Hatchwell BJ (2010) Parental provisioning behavior in a flock-living passerine, the vinous-throated parrotbill Paradoxornis webbianus. J Ornithol 151:483–490. https://doi.org/10.1007/s10336-009-0484-1
Lejeune LA, Savage JL, Bründl AC, Thiney A, Russell AF, Chaine AS (2019) Environmental effects on parental care visitation patterns in blue tits Cyanistes caeruleus. Front Ecol Evol 7:356. https://doi.org/10.3389/fevo.2019.00356
Leniowski K, Węgrzyn E (2018) Synchronisation of parental behaviors reduces the risk of nest predation in a socially monogamous passerine bird. Sci Rep 8:7385. https://doi.org/10.1038/s41598-018-25746-5
Lenth R, Singmann H, Love J, Buerkner P, Herve M (2019) Emmeans: estimated marginal means, aka leastsquares means. R package version 1.4.2, https://CRAN.R-project.org/package=emmeans
Lessells CM, McNamara JM (2012) Sexual conflict over parental investment in repeated bouts: negotiation reduces overall care. Proc R Soc Lond B 279:1506–1514. https://doi.org/10.1098/rspb.2011.1690
Lima SL, Dill LM (1990) Behavioral decisions made under the risk of predation: a review and prospectus. Can J Zool 68:619–640. https://doi.org/10.1139/z90-092
Mariette MM, Griffith SC (2012) Nest visit synchrony is high and correlates with reproductive success in the wild zebra finch Taeniopygia guttata. J Avian Biol 43:131–140. https://doi.org/10.1111/j.1600-048X.2012.05555.x
Mariette MM, Griffith SC (2015) The adaptive significance of provisioning and foraging coordination between breeding partners. Am Nat 185:270–280. https://doi.org/10.1086/679441
Martin TE, Scott J, Menge C (2000) Nest predation increases with parental activity: separating nest site and parental activity effects. Proc R Soc Lond B 267:2287–2293. https://doi.org/10.1098/rspb.2000.1281
McCully FR, Weimerskirch H, Cornell SJ, Hatchwell BJ, Cairo M, Patrick SC (2022) Partner intrinsic characteristics influence foraging trip duration, but not coordination of care in wandering albatrosses Diomedea exulans. Ecol Evol 12:9621. https://doi.org/10.1002/ece3.9621
McNamara JM, Gasson CE, Houston AI (1999) Incorporating rules of responding into evolutionary games. Nature 401:368–371. https://doi.org/10.1038/43869
McNamara JM, Houston AI, Barta Z, Osorno JL (2003) Should young ever be better off with one parent than with two? Behav Ecol 14:301–310. https://doi.org/10.1093/beheco/14.3.301
Meade J, Nam K-B, Lee J-W, Hatchwell BJ (2011) An experimental test of the information model for negotiation of biparental care. PLoS ONE 6:e19684. https://doi.org/10.1371/journal.pone.0019684
Milinski M (1997) How to avoid seven deadly sins in the study. Adv Stud Behav 26:59–180. https://doi.org/10.1016/S0065-3454(08)60379-4
Montgomerie RD, Weatherhead PJ (1988) Risks and rewards of nest defence by parent birds. Q Rev Biol 63:167–187. https://doi.org/10.1086/415838
Patrick SC, Corbeau A, Réale D, Weimerskirch H (2020) Coordination in parental effort decreases with age in a long-lived seabird. Oikos 129:1763–1772. https://doi.org/10.1111/oik.07404
Peluc SI, Sillett TS, Rotenberry JT, Ghalambor CK (2008) Adaptive phenotypic plasticity in an island songbird exposed to a novel predation risk. Behav Ecol 19:830–835. https://doi.org/10.1093/beheco/arn033
R Core Team (2022) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Austria. http://www.R-project.org. Accessed 20 Jul 2022
Raihani NJ, Nelson-Flower MJ, Moyes K, Browning LE, Ridley AR (2010) Synchronous provisioning increases brood survival in cooperatively breeding pied babblers. J Anim Ecol 79:44–52. https://doi.org/10.1111/j.1365-2656.2009.01606.x
Royle NJ, Hartley IR, Parker GA (2002) Sexual conflict reduces offspring fitness in zebra finches. Nature 416:733–736. https://doi.org/10.1038/416733a
Ruckstuhl KE (1999) To synchronise or not to synchronise: a dilemma for young bighorn males? Behaviour 136:805–818
Santema P, Schlicht E, Kempenaers B (2019) Testing the conditional cooperation model: what can we learn from parents taking turns when feeding offspring? Front Ecol Evol 7:94. https://doi.org/10.3389/fevo.2019.00094
Savage JL, Browning LE, Manica A, Russell AF, Johnstone RA (2017) Turn-taking in cooperative offspring care: by-product of individual provisioning behavior or active response rule? Behav Ecol Sociobiol 71:162. https://doi.org/10.1007/s00265-017-2391-4
Schlicht E, Santema P, Schlicht R, Kempenaers B (2016) Evidence for condition cooperation in biparental care systems? A comment on Johnstone et al. Behav Ecol 27:e2–e5. https://doi.org/10.1093/beheco/arw036
Schreiber E, Burger J (2002) Biology of Marine Birds. CRC Press, Boca Raton, FL
Shen S-F, Chen H-C, Vehrencamp SL, Yuan H-W (2010) Group provisioning limits sharing conflict among nestlings in joint-nesting Taiwan yuhina. Anim Behav 6:318–321. https://doi.org/10.1098/rsbl.2009.0909
Skutch AF (1949) Do tropical birds rear as many young as they can nourish. Ibis 91:430–455. https://doi.org/10.1111/j.1474-919X.1949.tb02293.x
Snow DW, Perrins CM, Hillcoat B, Gillmor R, Roselaar CS (1998) The birds of the Western Palearctic. Oxford University Press, Oxford, UK
Spoon TR, Millam JR, Owings DH (2006) The importance of mate behavioural compatibility in parenting and reproductive success by cockatiels, Nymphicus hollandicus. Anim Behav 71:315–326. https://doi.org/10.1016/j.anbehav.2005.03.034
Stearns SC (1992) The evolution of life histories. Oxford University Press, Oxford, UK
Thomson DL, Monaghan P, Furness RW (1998) The demands of incubation and avian clutch size. Biol Rev 73:293–304
Trapote E, Canestrari D, Baglione V (2021) Female helpers signal their contribution to chick provisioning in a cooperative breeding bird. Anim Behav 172:113–120. https://doi.org/10.1016/j.anbehav.2020.12.011
Trivers RL (1974) Parent-Offspring Conflict. Am Zool 14:249–264. https://doi.org/10.1093/icb/14.1.249
van Rooij EP, Griffith SC (2013) Synchronised provisioning at the nest: parental coordination over care in a socially monogamous species. PeerJ 1:232. https://doi.org/10.7717/peerj.232
Zahavi A (1977a) The cost of honesty (further remarks on the handicap principle). J Theor Biol 67:603–605. https://doi.org/10.1016/0022-5193(77)90061-3
Zahavi A (1977b) Reliability in communication systems and the evolution of altruism. In: Perrins C (ed) Evolutionary Ecology. Macmillan Press, London, UK, pp 253–259
Funding
This work was supported by the Natural Environment Research Council (NE/S00713X/1 and NE/R001669/1).
Natural Environment Research Council,NE/S00713X/1,Chay Halliwell,NE/R001669/1,Ben J Hatchwell
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Ethics approval
During nest building, laying and incubation each nest was checked every 1–3 days, with daily checks approaching laying, incubation and hatching. Whenever possible nests were sampled non-intrusively, e.g. incubation confirmed by observing females’ attendance at the nest. However, to record precise hatch dates, after 12 days of incubation, nests were checked daily for hatching by feeling gently within the nest, a practice that has been performed on this population for 29 years. Nestlings and adult immigrants were ringed by BJH and SJB under British Trust for Ornithology (BTO) Licence with two colour rings (size code: XF) on one leg and a metal BTO ring (size code: AA) on the other. When ringing nestlings, to minimise time chicks spent out of the nest and to ensure that carers did not return to an empty nest, half the brood was ringed at a time. During ringing, 5–20 µl of blood was taken by brachial venepuncture under UK Home Office licence (Project Licence PP5912664; Personal Licence (BJH) IE73AE8C8) for genotyping and sex determination. During sampling, nestlings were stored in an insulated bird-bag and remained warm and dry throughout. In total, 183 nestlings were ringed from nests sampled for this study. When ringing adult immigrants, mist-nests were watched continuously, and birds were extracted and processed immediately upon capture. In total, 21 breeding females, 20 breeding males and 11 helpers (10 males, 1 female) were observed in this study. Our experimental procedure necessitated some observer disturbance when setting up the camera and presenting models, however, we recorded no events of brood abandonment during or following our experiment. All applicable international, national, and institutional guidelines for the use of animals were followed and all regulated procedures were approved by the Animal Welfare and Ethical Review Body at the University of Sheffield.
Competing interests
The authors have no competing interests to declare that are relevant to the content of this article.
Additional information
Communicated by M. Leonard.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Halliwell, C., Biddiscombe, S.J. & Hatchwell, B.J. Experimental variation of perceived predation risk does not affect coordination of parental care in long-tailed tits. Behav Ecol Sociobiol 77, 107 (2023). https://doi.org/10.1007/s00265-023-03383-x
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00265-023-03383-x