
Abstract
We show that sweeping processes with possibly non-convex prox-regular constraints generate a strongly continuous input-output mapping in the space of absolutely continuous functions. Under additional smoothness assumptions on the constraint we prove the local Lipschitz continuity of the input-output mapping. Using the Banach contraction principle, we subsequently prove that also the solution mapping associated with the state-dependent problem is locally Lipschitz continuous.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The present paper is a continuation of [16], where we have studied a class of constrained evolution problems, called sweeping processes, in the framework of a real Hilbert space X endowed with scalar product \(\left\langle x,y \right\rangle \) and norm \(|x| = \sqrt{\left\langle x,x \right\rangle }\). In order to describe the processes studied in [16], we assume that we are given right-continuous functions \(u:[0,T] \rightarrow X\) and \(w:[0,T] \rightarrow W\), where W is a real Banach space and we suppose that u and w are regulated, i. e. they admit left limits at every point \(t \in (0,T]\). We also assume that a not necessarily convex moving constraint \(Z(w(t))\subset X\) is given and that Z(w(t)) is r-prox-regular, i.e. Z(w(t)) is a closed sets having a neighborhood of radius \(r > 0\) where the metric projection exists and is unique.
Assuming that the sets Z(w(t)) satisfy a suitable uniform non-empty interior condition, we have proved in [16] that for every initial condition \(x_0 \in Z(w(0))\) there exists a right-continuous function \(\xi :[0,T] \rightarrow X\) of bounded variation (BV) such that the variational inequality
is satisfied for every regulated test function \(z:[0,T] \rightarrow X\) such that \(z(t) \in Z(w(t))\) for all \(t \in [0,T]\), with \(x(t) := u(t) - \xi (t)\) and \(V(\xi )(t) := \mathop {\mathrm {Var}}_{[0,t]} \xi \), the variation of \(\xi \) over [0, t] for \(t \in [0,T]\). The two integrals in (0.1) can be interpreted in the sense of the Kurzweil integral introduced in [20]: In the first integral we are integrating X-valued functions, while the second integral corresponds to the standard case of real-valued functions.
Since the normal cone \(N_Z(x)\) of a closed \(Z \subseteq H\) at \(x \in Z\) is defined by the formula
the variational inequality (0.1) can be formally interpreted as a BV integral formulation of the differential inclusion
with \(C(t) = u(t) - Z(w(t))\), \(t \in [0,T]\).
In [16, Section 5], we have shown under some technical assumptions, but dropping the uniform non-empty interior condition for Z(w(t)), that if the inputs u, w are absolutely continuous, then the output \(\xi \) is absolutely continuous and satisfies the pointwise variational inequality
for a. e. \(t \in (0,T)\) and all \(z \in Z(w(t))\). The existence and uniqueness result for (0.4) was stated and proved in [16, Corollary 5.3] and we recall the precise statement below in Proposition 2.3.
A detailed survey of the literature related to non-convex sweeping processes was given in [16] and we do not repeat it here. Instead, we pursue further the study of (0.4) in the space of absolutely continuous functions. Let us mention only the publications that have particularly motivated our research, namely the pioneering paper [24] where the concept of sweeping process was elaborated, the detailed studies [7, 25] of prox-regular sets, and a deep investigation of prox-regular sweeping processes carried out in [8, 26].
It turns out that it is convenient in this context to represent the sets \(Z(w) = \{x \in X: G(x,w) \le 1\}\) as sublevel sets of a function \(G: X \times W \rightarrow [0,\infty )\) satisfying suitable technical assumptions. A detailed comparison of different continuity criteria has been done in the convex case in [5]. In the nonconvex case treated in the present paper we prove as our main result that the input-output mapping \((u,w) \mapsto \xi \) is strongly continuous with respect to the \(W^{1,1}\)-norms if G is continuously differentiable with respect to both x and w, and Lipschitz continuous if both gradients \(\nabla _x G, \nabla _w G\) are Lipschitz continuous. As a consequence of the Lipschitz input-output dependence, we apply the Banach contraction principle to prove the unique solvability of an implicit state dependent problem with w of the form \(w(t) = g(t, u(t), \xi (t))\) with a given smooth function \(g:[0,T]\times X \times X \rightarrow W\). The authors are not aware of any result of this kind in the literature on prox-regular sweeping processes. Implicit problems in the convex case have been solved under suitable additional compactness assumptions in [18, 19] and without compactness in [5]. The non-convex case has been considered for example in [1, 2, 12, 13, 21], but to our knowledge, in all existing publications, the sweeping process is regularized by some kind of compactification or viscous regularization. In our case, no compactification or other kind of regularization comes into play.
The paper is structured as follows. In Sect. 1, we identify sufficient conditions on the function \(G(\cdot , w)\) which guarantee that the sublevel set Z(w) is r-prox-regular for every \(w \in W\). Section 2 is devoted to finding additional hypotheses on the w-dependence of G which guarantee the validity of the existence and uniqueness result for Problem (0.4) in [16, Corollary 5.3]. The strong continuity of the \((u,w) \mapsto \xi \) input-output mapping with respect to the \(W^{1,1}\)-norm is proved in Sect. 3, and the local Lipschitz continuity of the mapping \(u \mapsto \xi \) in the implicit case \(w(t) = g(t, u(t), \xi (t))\) is proved in Sect. 4.
2 Prox-Regular Sets of Class \(C^1\)
Let us start by recalling the definition of prox-regular set, in agreement with [25, items (a) and (g) of Theorem 4.1].
Definition 1.1
Let X be a real Hilbert space endowed with scalar product \(\left\langle \cdot , \cdot \right\rangle \) and norm \(|x| = \sqrt{\left\langle x,x \right\rangle }\), let \(Z\subset X\) be a closed connected set, and let \(\mathrm {dist}(x,Z) := \inf \{|x-z|: z\in Z\}\) denote the distance of a point \(x\in X\) from the set Z. Let \(r>0\) be given. We say that Z is r-prox-regular if the following condition hold.
We have the following characterization of prox-regular sets (see, e. g., [16, 25]).
Lemma 1.2
A set \(Z\subset X\) is r-prox-regular if and only if for every \(y \in X\) such that \(d =\mathrm {dist}(y,Z) < r\) there exists a unique \(x\in Z\) such that \(|y-x| = d\) and
We represent the sets Z as the sublevel sets of a function \(G:X \rightarrow [0,\infty )\) in the form
We define the gradient \(\nabla G(x) \in X\) of G at a point \(x \in X\) by the formula
The following hypothesis is assumed to hold.
Hypothesis 1.3
Let X be a real Hilbert space endowed with scalar product \(\left\langle \cdot , \cdot \right\rangle \) and norm \(|x| = \sqrt{\left\langle x,x \right\rangle }\). We assume that (1.3) holds for a function \(G:X \rightarrow [0,\infty )\), \(\nabla G(x)\) exists for every \(x \in X\), and there exist positive constants \(\lambda , c\) and a continuous increasing function \(\mu : [0,\infty ) \rightarrow [0,\infty )\) such that \(\mu (0) = 0\), \(\lim _{s \rightarrow \infty } \mu (s) = \infty \), and
-
(i)
\(G(x) = 1\ \Longrightarrow \ |\nabla G(x)| \ge c>0\) for all \(x \in X\);
-
(ii)
\(|\nabla G(x) - \nabla G(y)| \le \mu (|x-y|)\) for all \(x,y \in Z\);
-
(iii)
\(\left\langle \nabla G(x) - \nabla G(z), x-z \right\rangle \ge -\lambda |x-z|^2\) for all \(x\in \partial Z\) and \(z \in Z\).
Throughout the paper, for a set \(S \subset X\), the symbols \(\partial S\), \(\mathrm {Int\,}S\), and \(\overline{S}\) will denote respectively the boundary, the interior, and the closure of S. It is easy to check that under Hypothesis 1.3 we have \(\partial Z = \{x \in X: G(x) = 1\}\), so that an element \(x \in X\) belongs to \(\mathrm {Int\,}Z\) if and only if \(G(x) < 1\). Indeed, if \(G(x) = 1\), then
For \(n\in \mathbb {N}\) put \(x_n := x + \frac{1}{n}\nabla G(x)\). We have \(G(x_n) > 1\) for n sufficiently large, hence \(x_n \notin Z\). Since \(x_n\) converge to x as \(n\rightarrow \infty \), we conclude that \(x \in \partial Z\).
In the convex case, we can choose G to be the Minkowski functional \(M_Z\) (or gauge) associated with Z defined as \(M_Z(x) = \inf \{s>0: \frac{1}{s} x \in Z\}\). Then condition (iii) of Hypothesis 1.3 is automatically satisfied, since \(\nabla M_Z\) is monotone, and (ii) is just the uniform continuity condition of \(\nabla M_Z\). For non-convex sets Z, condition (iii) excludes sharp concavities of \(\partial Z\).
We now prove the following result.
Proposition 1.4
Let Hypothesis 1.3 hold and let \(r = c/\lambda \). Then for every \(y \in X\) such that \(d =\mathrm {dist}(y,Z) \in (0,r)\) there exists a unique \(x\in \partial Z\) such that
and
In particular, Z is r-prox-regular.
The statement of Proposition 1.4 is not new. The finite-dimensional case was already solved in [28]. The fact that the conditions of Hypothesis 1.3 are sufficient for a set given by (1.3) to be prox-regular also in the infinite-dimensional case was shown in [4, Theorem 9.1] (see also [3]). The proof there refers to a number of deep concepts from non-smooth analysis along the lines, e. g., of [6, Chapter 2]. Here we present instead an elementary self-contained proof using no other analytical tools but the properties of the scalar product, and the argument is split into several steps including two auxiliary Lemmas.
Lemma 1.5
Let Hypothesis 1.3 hold and let \(r = c/\lambda \). Then for all \(x \in \partial Z\) and \(z\in Z\) we have
Proof of Lemma 1.5
For \(x \in \partial Z\) and \(z \in Z\) we have
and the assertion follows.
Lemma 1.6
Let Hypothesis 1.3 hold, let \(V \subset X\) be the set of all \(y \in X\) for which there exists \(x \in Z\) such that \(|y-x| = \mathrm {dist}(y,Z)\), and let \(U_r := \{y \in Z: \mathrm {dist}(y, Z) < r\}\). Then the set \(V\cap U_r\) is dense in \(\overline{U_r}\).
A highly involved proof of Lemma 1.6 can be found in a much more general setting, e. g., in [6, Theorem 3.1, p. 39]. For the reader’s convenience, we show that in our special case, it can be proved in an elementary way.
Proof of Lemma 1.6
We prove that for a given \(y \in U_r\) and every \(\varepsilon >0\) there exists \(y^* \in V\cap U_r\) such that
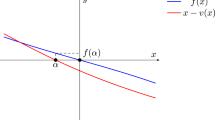
Let \(y \in X\) be arbitrarily chosen such that \(d := \mathrm {dist}(y,Z) < r\). For any \(\alpha \in (0,r-d)\) we find \(x_\alpha \in \partial Z\) such that \(|y-x_\alpha | = d+\alpha \) and put (see Fig. 1)

Illustration to Lemma 1.6
Using Lemma 1.5 we check that \(y_\alpha \in V\), \(|y_\alpha - x_\alpha | = d+\alpha = \mathrm {dist}(y_\alpha , Z)\). We have by (1.7) that \(y - y_\alpha = (d+\alpha )({\bar{n}}_\alpha - n_\alpha )\), hence,
This implies that \(-1 \le q_\alpha < 1\). Indeed, if \(q_\alpha =1\), then \(y = y_\alpha \) and \(\mathrm {dist}(y, Z) = d+\alpha \) which is a contradiction. Furthermore,
We have \(G(x_\alpha ) = 1\), hence \(G(x_\alpha + t(y-y_\alpha )) < 1\) in a right neighborhood of 0. Put \(T_\alpha := \inf \{t > 0\, : G(x_\alpha + t(y-y_\alpha )) \ge 1\}\). Then \(T_\alpha > 0\), and for every \(t_\alpha \in (0,T_\alpha )\), by hypothesis that \(\mathrm {dist}(y, Z) = d\) and by (1.7), (1.8) we find
so that
If \(\limsup _{\alpha \searrow 0} T_\alpha > 1/2\), then for all \(\alpha \) such that \(T_\alpha > 1/2\) we can take \(t_\alpha =1/2\) in (1.10) and obtain that
and (1.6) is satisfied provided we choose \(y^* = y_\alpha \) for a sufficiently small \(\alpha \) such that \(T_\alpha > 1/2\).
It remains to consider the case \(\limsup _{\alpha \searrow 0} T_\alpha \le 1/2\). We have \(G(x_\alpha + T_\alpha (y-y_\alpha )) = 1\), thus, by Hypothesis 1.3 and (1.8), we find
For \(p \ge 0\) put
The function \(M:[0,\infty ) \rightarrow [0,\infty )\) is increasing and convex, and the function \({\hat{M}}(p) = M(p)/p\) is increasing, unbounded, and \({\hat{M}}(0+) = \mu (0) = 0\). From the above computations we conclude that
where c is the constant from Hypothesis 1.3 (i).
Put \(t_\alpha = T_\alpha /2\). Then \(t_\alpha < 1/2\) for \(\alpha \) sufficiently small. Using (1.11) and (1.10) we infer that
hence, putting \(p_\alpha := {\hat{M}}^{-1} (c/(2r) |y-y_\alpha |)\), we obtain
and we obtain (1.6) for \(y^* = y_\alpha \) and \(\alpha >0\) sufficiently small from the continuity of \(\mu \), M and \(\hat{M}\) at 0.
We are now ready to prove Proposition 1.4.
Proof of Proposition 1.4
To prove that Z is r-prox-regular, consider any \(d \in (0,r)\) and put
Let \(f: \Gamma \rightarrow X\) be the mapping defined by the formula
Then f is continuous and \(f(\Gamma ) \subset \Gamma _d\). Indeed, we have \(|f(x) - x| = d\) and, choosing an arbitrary \(z \in Z\),
by virtue of Lemma 1.5. Furthermore, by Lemma 1.6, for y from a dense subset of \(\Gamma _d\) there exists \(x \in \Gamma \) and a unit vector n(x) such that \(y= x+ dn(x)\) and \(|y-z| \ge d\) for all \(z \in Z\). We consequently have \(|x+tn(x) - z| \ge |x+dn(x) - z| - (d-t) \ge t\) for all \(t \in (0,d]\). Put
We have for all \(t \in (0,d)\) that \(x + tn(x) - t{\hat{n}}(x) \notin \mathrm {Int\,}Z\), hence \(G(x + tn(x) - t{\hat{n}}(x)) \ge 1\), and
and we conclude that \(n(x) ={\hat{n}}(x)\). The range \(f(\Gamma )\) of the mapping f defined by (1.13) is therefore dense in \(\Gamma _d\). Assume that there exists \(y \in \Gamma _d\setminus f(\Gamma )\). We find a sequence of elements \(y_j \in f(\Gamma )\), \(j \in \mathbb {N}\), which converges to y, \(y_j = f(x_j)\). For \(j,k \in \mathbb {N}\) we have in particular
By Lemma 1.5 we have
hence,
We conclude that \(\{x_j\}\) is a Cauchy sequence in X, hence it converges to some \(x \in \Gamma \) and the continuity of f yields \(y = f(x)\). We have thus proved that for each \(y \in \Gamma _d\) there exists a unique \(x \in \Gamma \) such that \(y = f(x)\), and the assertion follows from Lemma 1.6.
3 Absolutely Continuous Inputs
We now consider a family of sets \(\{Z(w): w\in W\}\) parameterized by elements w of a Banach space W with norm \(|\cdot |_W\) and defined as the sublevel sets
of a locally Lipschitz continuous function \(G: X \times W \rightarrow [0,\infty )\). Similarly as in (1.4), we define the partial gradients \(\nabla _x G(x,w) \in X\), \(\nabla _w G(x,w) \in W'\) for \(x\in X\) and \(w \in W\) by the identities
where \(W'\) is the dual of W, and \(\left\langle \!\left\langle \cdot ,\cdot \right\rangle \!\right\rangle \) is the duality \(W \rightarrow W'\). We assume the following hypothesis to hold.
Hypothesis 2.1
Let X be a real Hilbert space endowed with scalar product \(\left\langle \cdot , \cdot \right\rangle \) and norm \(|x| = \sqrt{\left\langle x,x \right\rangle }\) and let W be a real Banach space with norm \(|\cdot |_W\). We assume that (2.1) holds for a locally Lipschitz continuous function \(G: X \times W \rightarrow [0,\infty )\) for which \(\nabla _x G(z,w)\) exists for every \((z,w) \in Z\times W\) and there exist positive constants \(\lambda , c, L\) and functions \(\mu _1: W \times [0,\infty ) \rightarrow [0,\infty )\), \(\mu _2: [0,\infty ) \rightarrow [0,\infty )\) such that \(\mu _1(w,0) = \mu _2(0) = 0\), \(\lim _{s \rightarrow \infty } \mu _1(w,s) = \lim _{s \rightarrow \infty } \mu _2(s) = \infty \) for every \(w \in W\), and
-
(i)
\(G(x,w) = 1\ \Longrightarrow \ |\nabla _x G(x,w)| \ge c>0\) for all \(x \in X\) and \(w \in W\);
-
(ii)
\(|\nabla _x G(x,w) - \nabla _x G(y,w)| \le \mu _1(w,|x-y|)\) for all \(x,y \in Z(w)\) and \(w \in W\);
-
(iii)
\(\left\langle \nabla _x G(x,w) - \nabla _x G(z,w), x-z \right\rangle \ge -\lambda |x-z|^2\) for all \(x\in \partial Z(w)\), \(z \in Z(w)\), and \(w \in W\);
-
(iv)
\(|G(x,w) - G(x,w')| \le L |w - w'|_W\) for all \(x \in X\) and \(w,w' \in W\);
-
(v)
\(\forall \rho >0 \ \forall w \in W \ \forall x \in X:\)
$$\begin{aligned} \mathrm {dist}(x, Z(w)) \ge \rho \ \Longrightarrow \ G(x,w)-1 \ge \mu _2(\rho ). \end{aligned}$$(2.4)
The property (v) in Hypothesis 2.1 is a kind of uniform coercivity of the function G which will play a role in the next Lemma. Let us observe that Hypothesis 2.1 and Proposition 1.4 imply that the set Z(w) given by (2.1) is r-prox-regular for every \(w \in W\).
Lemma 2.2
Let Hypothesis 2.1 hold. Then for every \(K>0\) there exists a constant \(C_K>0\) such that
for every \(w_1,w_2 \in W\), where \(d_H\) denotes the Hausdorff distance
Proof
Let \(K>0\) be given and let \(\max \{|w_1|_W, |w_2|_W\} \le K\). We first check that
Indeed, if this was not true, we can assume that there exists \(x \in Z(w_1)\) such that \(\mathrm {dist}(x, Z(w_2)) \ge D_K + \alpha \) for some \(\alpha > 0\). By Hypotheses 2.1 (iv)-(v) we then have
which is a contradiction.
We now consider the cases \(d_H(Z(w_1),Z(w_2))\ge r\) or \(d_H(Z(w_1),Z(w_2)) < r\) separately. Let us start with the case
A. \(d_H(Z(w_1),Z(w_2)) \ge r\).
Then for \(x \in Z(w_1)\) we have by Hypotheses 2.1 (iv)-(v) that
and (2.6) yields
In the case
B. \(d_H(Z(w_1),Z(w_2))<r\)
we proceed as follows. For every \(\varepsilon > 0\) there exists \(x_\varepsilon \in Z(w_1)\) be such that \(d_\varepsilon :=\mathrm {dist}(x_\varepsilon , Z(w_2)) \in (0,r)\) and \(d_H(Z(w_1),Z(w_2)) - \varepsilon \le d_\varepsilon \le d_H(Z(w_1),Z(w_2))\). By Proposition 1.4, there exists \(x'_\varepsilon \in \partial Z(w_2)\) such that \(x_\varepsilon = x'_\varepsilon + d_\varepsilon n'_\varepsilon \), where
We have \(G(x'_\varepsilon ,w_2) = 1\), \(G(x_\varepsilon ,w_2) > 1\), and by (2.8), Hypotheses 2.1 (i) and 2.1 (iii),
On the other hand, we have \(G(x_\varepsilon ,w_1) \le 1 = G(x'_\varepsilon ,w_2)\), hence, by Hypothesis 2.1 (iv),
and combining (2.7) with (2.9) and with the arbitrariness of \(\varepsilon \) we complete the proof.
We cite without proof the following result.
Proposition 2.3
Let \(\{Z(w); w \in W\}\) be a family of r-prox-regular sets and let (2.5) hold for every \(K > 0\) and every \(w_1,w_2 \in W\). Then for every \(u \in W^{1,1}(0,T; X)\), \(w \in W^{1,1}(0,T; W)\), and every initial condition \(x_0 \in Z(w(0))\) there exists a unique solution \(\xi \in W^{1,1}(0,T; X)\) such that
The statement was proved in [16, Corollary 5.3] under the assumption that the constant \(C_K\) in (2.5) can be chosen independently of K. This is indeed not a real restriction, since the input values w(t) belong to an a priori bounded set. We obtain global Lipschitz continuity under the hypotheses of Proposition 2.3 by choosing \(K > \sup _{t\in [0,T]} |w(t)|_W\) in (2.5) and modifying the function G for \(|w|_W \ge K\) for instance as \({\tilde{G}}(x,w) = G(x, f(|w|_W) w)\), where \(f:[0,\infty ) \rightarrow [0,\infty )\) is a smooth function such that \(f(s) = 1\) for \(s\in [0,K]\) and \(s f(s) \le K\) for \(s> K\).
The above developments have shown that the assumptions of Proposition 2.3 are fulfilled if Hypothesis 2.1 holds. The existence and uniqueness of solutions to (0.4) is therefore guaranteed for all \(u \in W^{1,1}(0,T; X)\), \(w \in W^{1,1}(0,T; W)\), and every initial condition \(x_0 \in Z(w(0))\). We now prove the following identity which plays a substantial role in our arguments.
Lemma 2.4
Let Hypothesis 2.1 hold and let \(u,w,\xi ,x\) be as in Proposition 2.3. Let \(\nabla _w G: X \times W \rightarrow W'\) be continuous. Then
for almost all \(t \in (0,T)\) with the choice
Proof
We first check that the denominator in (2.14) is bounded away from zero. Indeed, thanks to Hypothesis 2.1(ii) we find \(\delta _c > 0\) such that the implication
holds for all \(x_1, x_2 \in Z(w(t))\). Then we have
With this choice of \({\hat{x}}\), we have
for all \(t \in [0,T]\). For a. e. \(t \in (0,T)\) one of the following two cases occurs:
-
(1)
\(\dot{\xi }(t) = 0\),
-
(2)
\(\dot{\xi }(t) \ne 0\).
Let \(B = \{t \in (0,T): \dot{\xi }(t) \ne 0\}\). For \(t\in B\) we have \(x(t) \in \partial Z(w(t))\), that is, \(G(x(t),w(t)) = 1\). Hence, for a. e. \(t \in B\) we have
Moreover, for \(t\in B\), the vector \(\dot{\xi }(t)\) points in the direction of the unit outward normal vector n(x(t), w(t)) to Z(w(t)) at the point x(t), that is,
From (2.16)–(2.17) we obtain for \(t \in B\) the identity
which is of the desired form
with
which holds for a. e. \(t \in B\) by the above argument. Since \(\mathrm {dist}(x(t), \partial Z(w(t))) = 0\) for \(t \in B\), we obtain (2.13) directly from (2.19). For \(t \in (0,T)\setminus B\), identity (2.13) is trivial since \(\dot{\xi }(t) = 0\) a. e. on \(t \in (0,T)\setminus B\).
Under Hypothesis 2.1, the mapping \((x,w) \mapsto \mathrm {dist}(x,Z(w))\) is locally Lipschitz continuous. This can be easily proved as follows. Let \(x,x' \in X\), \(w,w' \in W\) be given. Put \(d=\mathrm {dist}(x, Z(w))\), \(d'=\mathrm {dist}(x', Z(w'))\), and assume for instance that \(d \ge d'\). For an arbitrary \(\varepsilon > 0\) we find \(z'\in Z(w')\) such that \(|x'-z'|\le d'+\varepsilon \), and \(z \in Z(w)\) such that \(|z-z'|\le d_H(Z(w),Z(w'))+\varepsilon \). Then
and the assertion follows from (2.5). Moreover the following statement holds true.
Lemma 2.5
Let Hypothesis 2.1 hold, and let \(K>0\) be given. Then there exists \(m_K>0\) such that for all \(w,w' \in W\) satisfying the inequalities
and for all \(x, x' \in X\), \(x \in Z(w)\), \(x' \in Z(w')\) we have
Proof
Put \(d = \mathrm {dist}(x,\partial Z(w))\), \(d' =\mathrm {dist}(x',\partial Z(w'))\), and assume \(d \ge d'\). For every \(\varepsilon >0\) we find \(z' \in \partial Z(w')\) such that \(|x'-z'| \le d'+\varepsilon \), and \(z \in \partial Z(w)\) such that \(|z'-z| \le d_H(\partial Z(w), \partial Z(w'))+\varepsilon \). We argue as in (2.21) and obtain
The proof will be complete if we prove that for a suitable value of \(m_K\) and for \(w,w'\) satisfying (2.22) we have
We claim that the right choice of \(m_K\) is
with \(C_K\) from Lemma 2.2 and any \(d^* < r\) with r as in Proposition 1.4.
Indeed, from Lemma 2.2 it follows that \(\rho :=\) \(d_H(Z(w), Z(w')) \le d^*\). Consider any \(z \in \partial Z(w)\) and assume that \(z \notin \partial Z(w')\). We distinguish two cases: \(z \in \mathrm {Int\,}Z(w')\) and \(z \notin Z(w')\). For \(z \in \mathrm {Int\,}Z(w')\) and \(t\ge 0\) we put
Then for \(t<r\) we have \(\mathrm {dist}(z(t), Z(w)) = |z(t) - z| = t\). Since \(d_H(Z(w), Z(w')) =\rho \le d^*< r\), there exists necessarily \(t \le \rho \) such that \(z(t) \in \partial Z(w')\), and we conclude that \(\mathrm {dist}(z,\partial Z(w')) \le \rho \). In the case \(z \notin Z(w')\) we use Proposition 1.4 and find \(z' \in \partial Z(w')\) such that \(\mathrm {dist}(z, Z(w')) = \mathrm {dist}(z,\partial Z(w')) = |z-z'| \le \rho \) and (2.23) follows.
It is easy to see that a counterpart of inequality (2.23) does not hold for general sets. It suffices to consider \(R_1> R_2 > 0\) and \(Z_1 = \overline{B_{R_1}(0)}\), \(Z_2 = Z_1 \setminus B_{R_2}(0)\), where for \(x \in X\) and \(R > 0\) we denote by \(B_R(x)\) the open ball \(\{y\in X: |x-y| < R\}\). Then \(d_H(Z_1, Z_2) = R_2\), \(d_H(\partial Z_1, \partial Z_2) = R_1-R_2\), so that (2.23) is violated for \(R_2 < R_1/2\).
The solution mapping of (2.10)–(2.12) is continuous in the following sense.
Theorem 2.6
Let Hypothesis 2.1 hold and let \(\nabla _w G: X \times W \rightarrow W'\) be continuous. Let \(u\in W^{1,1}(0,T; X)\) and \(w \in W^{1,1}(0,T; W)\) be given, and let \(\{u_n; n\in \mathbb {N}\} \subset W^{1,1}(0,T; X)\) and \(\{w_n; n\in \mathbb {N}\} \subset W^{1,1}(0,T; W)\) be sequences such that \(u_n(0) \rightarrow u(0)\), \(w_n(0) \rightarrow w(0)\) as \(n \rightarrow \infty \), and
as \(n \rightarrow \infty \). Let \(\xi _n, \xi \in W^{1,1}(0,T; X)\) be the solutions to (2.10)–(2.12) corresponding to the inputs \(u_n, w_n, u,w\), respectively, with initial conditions \(x_n^0 \in Z(w_n(0)), x_0 \in Z(w(0))\) such that \(|x_n^0 - x_0| \rightarrow 0\) as \(n \rightarrow \infty \). Then
The proof of Theorem 2.6 relies on the following general property of functions in \(L^1(0,T;X)\) proved in [14].
Lemma 2.7
Let \(\{v_n; n\in \mathbb {N}\cup \{0\}\} \subset L^1(0,T;X)\), \(\{g_n; n\in \mathbb {N}\cup \{0\}\} \subset L^1(0,T; \mathbb {R})\) be given sequences such that
-
(i)
\(\lim _{n\rightarrow \infty } \int ^T_0\left\langle v_n(t), \varphi (t) \right\rangle \,\mathrm {d}t = \int ^T_0\left\langle v(t), \varphi (t) \right\rangle \,\mathrm {d}t \quad \forall \varphi \in C([a,b];X)\),
-
(ii)
\(\lim _{n\rightarrow \infty } \int ^T_0|g_n(t) - g_0(t)| \,\mathrm {d}t = 0\),
-
(iii)
\(|v_n(t)| \le g_n(t)\) a. e. \(\forall n\in \mathbb {N}\),
-
(iv)
\(|v_0(t)| = g_0(t)\) a. e.
Then \(\lim _{n\rightarrow \infty } \int ^T_0|v_n(t) - v_0(t)| \,\mathrm {d}t = 0\).
Notice that Lemma 2.7 does not follow from the Lebesgue Dominated Convergence Theorem, since we do not assume the pointwise convergence. The proof is elementary and we repeat it here for the reader’s convenience.
Proof of Lemma 2.7
We first prove that property (i) holds for every \(\varphi \in L^\infty (0,T; X)\). For a fixed \(\varphi \in L^\infty (0,T;X)\) and \(\delta > 0\) we use Lusin’s Theorem to find a function \(\psi \in C([0,T];X)\) and a set \(M_\delta \subset [0,T]\) such that \(\mathrm {meas}(M_\delta ) < \delta \) and \(\psi (t) = \varphi (t)\) for all \(t\in [0,T] \setminus M_\delta , \Vert \psi \Vert \le \Vert \varphi \Vert \). We then have
Since \(\delta \) can be chosen arbitrarily small and \(g_0\in L^1(0,T)\), the integral of \(g_0\) over \(M_\delta \) can be made arbitrarily small and we obtain
Let us note that the transition from (i) to (2.26) is related to the Dunford-Pettis Theorem, see [10]. To prove Lemma 2.7 we put for \(t\in [0,T]\)
Then \(\varphi \in L^\infty (0,T;X)\) and the inequality
holds for a. e. \(t\in [0,T]\). By Hölder’s inequality we have
and the assertion follows from (2.26).
We are now ready to prove one of our main results, namely Theorem 2.6.
Proof of Theorem 2.6
By Lemma 2.4 we check that \(s_n\) given by the formula
satisfy a. e. the identity
Theorem 4.4 of [16] states that \(x_n \rightarrow x\) uniformly in C([0, T]; X). Using Lemma 2.5 and formulas (2.15), (2.24) we conclude that \(s_n\) converge strongly to s in \(L^1(0,T;X)\). Put \(y_n = \dot{u}_n +s_n - 2\dot{\xi }_n = \dot{x}_n + s_n - \dot{\xi }_n\), \(y = \dot{u} +s - 2\dot{\xi }= \dot{x} + s - \dot{\xi }\). For a. e. \(t\in (0,T)\) we have by (2.13), (2.28) that
and similarly \(|y(t)|^2 = |\dot{u}(t) + s(t)|^2\). Put \(v_n(t) = y_n(t)\), \(v_0(t) = y(t)\), \(g_n(t) = |\dot{u}_n(t) + s_n(t)|\), \(g_0(t) = |\dot{u}(t) + s(t)|\). We see that hypotheses (ii)–(iv) of Lemma 2.7 are satisfied. The assertion of Theorem 2.6 will follow from Lemma 2.7 provided we check that
This will certainly be true if we prove that
Let \(\varphi \in C([0,T];X)\) be given. For an arbitrary \(\varepsilon >0\) we find \(\psi \in C^1([0,T];X)\) such that \(\Vert \psi - \varphi \Vert < \varepsilon \). There exists a constant \(C>0\) independent of n and \(\varepsilon \) such that
hence,
where we can integrate by parts and obtain
By [16, Theorem 4.4], the right-hand side of (2.33) converges to 0 as \(n \rightarrow \infty \). Since \(\varepsilon \) in (2.32) can be chosen arbitrarily small, we obtain (2.30) from (2.32) and (2.33). Using Lemma 2.7 we conclude that
and the assertion of Theorem 2.6 easily follows.
4 Local Lipschitz Continuity
We have proved in the previous section that the solution mapping \((u,w) \mapsto \xi \) of Problem (2.10)–(2.12) is strongly continuous with respect to the \(W^{1,1}\)-norm provided Hypothesis 2.1 holds and \(\nabla _{w}G\) is a continuous function. Here we show that if \(\nabla _{x}G\), \(\nabla _{w}G\) are Lipschitz continuous, then the solution mapping of Problem (2.10)–(2.12) is locally Lipschitz continuous with respect to the \(W^{1,1}\)-norm. Here are the precise assumptions.
Hypothesis 3.1
Let Hypothesis 2.1 hold. Assume that the partial derivatives \(\nabla _{x}G(x,w)\) \(\in \) X, \(\nabla _w\,G(x,w) \in W'\) exist for every \((x,w) \in X\times W\) and there exist positive constants \(K_0, K_1, C_0, C_1\) such that
-
(i)
\(|\nabla _x G(x,w)| \le K_0, \ |\nabla _w G(x,w)|_{W'} \le K_1 \qquad \forall (x,w) \in X\times W\),
-
(ii)
for every \((x,w), (x',w') \in X\times W\) we have
$$\begin{aligned} |\nabla _{x}G(x,w)-\nabla _{x}G(x',w')|\le & {} C_0 (|x-x'|+|w-w'|_W)\,, \end{aligned}$$(3.1)$$\begin{aligned} |\nabla _{w}G(x,w)-\nabla _{w}G(x',w')|_{W'}\le & {} C_1\, (|x-x'|+|w-w'|_W). \end{aligned}$$(3.2)
In the following two lemmas we derive some useful formulas.
Lemma 3.2
Let Hypothesis 3.1 (i) hold, and let \((u,w) \in W^{1,1}(0,T; X)\times W^{1,1}(0,T\,; W)\), \(x^0 \in Z({w}(0))\), and \(\xi \in W^{1,1}(0,T; X)\) satisfy (2.10)–(2.12) with \(x(t) = u(t) - \xi (t)\). For \(t\in (0,T)\) set
Then for a. e. \(t \in (0,T)\) we have either
-
(i)
\(\dot{\xi }(t) = 0\), \(\frac{\,\mathrm {d}}{\,\mathrm {d}t} G(x(t),w(t)) = B[u,w](t)\),
or
-
(ii)
\(\dot{\xi }(t) \ne 0\), \(x(t) \in \partial Z(w(t))\), \(A[u,w](t) = B[u,w](t) > 0\), \(\max _{\tau \in [0,T]} G(x(\tau ),w(\tau )) = G(x(t),w(t)) = 1\), \(\frac{\,\mathrm {d}}{\,\mathrm {d}t} G(x(t),w(t)) = 0\), and
$$\begin{aligned} \dot{\xi }(t) = \frac{A[u,w](t)}{|\nabla _{x}G(x(t),w(t))|^2}\,\nabla _{x}G(x(t),w(t))\,. \end{aligned}$$(3.3)
Moreover, for a. e. \(t \in (0,T)\) we have that
with c from Hypothesis 2.1 (i).
Proof
Let \(L \subset (0,T)\) be the set of Lebesgue points of all functions \(\dot{u}\), \(\dot{w}\), \(\dot{\xi }\). Then L has full measure in [0, T], and for \(t\in L\) we have
If \(\dot{\xi }(t) = 0\), then \(\dot{x}(t) = \dot{u}(t)\), and (i) follows from (3.6). If \(\dot{\xi }(t) \ne 0\), then \(x(t) \in \partial Z({w}(t))\), hence \(G(x(t),w(t)) = 1 = \max _{\tau \in [0,T]} G(x(\tau ),w(\tau ))\) and \(\frac{\,\mathrm {d}}{\,\mathrm {d}t}G(x(t),w(t))=0\), so that (3.3) follows from (2.17). Furthermore, (3.6) yields \(\left\langle \dot{x}(t), \nabla _{x}G(x(t),w(t)) \right\rangle = -\left\langle \!\left\langle \dot{w}(t),\nabla _{w}G(x(t),w(t)) \right\rangle \!\right\rangle \), hence
We are left to prove (3.4)–(3.5). Formula (3.4) follows from Hypothesis 3.1 (i). Formula (3.5) is trivial if \(\dot{\xi }(t) = 0\); otherwise we have \(|\dot{\xi }(t)|\) \(=\) \(A[u,w](t)/|\nabla _{x}G(x(t),w(t))|\) \(=\) \(B[u,w](t)/|\nabla _{x}G(x(t),w(t))|\), \(x(t) \in \partial Z(w(t))\), and (3.5) follows.
Lemma 3.3
Let Hypothesis 3.1 (i) hold, let \(({u_i},{w_i}) \in W^{1,1}(0,T; X)\times W^{1,1}(0,T\,; W)\) and \(x_i^0 \in Z({w_i}(0))\) be given for \(i=1,2\), let \(\xi _i \in W^{1,1}(0,T; X)\) be the respective solutions to (2.10)–(2.12) with \(x_i = {u_i}-\xi _i\) for \(i=1,2\). Then for a. e. \(t\in (0,T)\) we have
where A and B are defined as in Lemma 3.2.
Proof
The assertion follows directly from Lemma 3.2 if \(\dot{\xi }_1(t) = \dot{\xi }_2(t) = 0\). Assume now
\(\bullet \) \(\dot{\xi }_1(t)\ne 0\), \(\dot{\xi }_2(t) \ne 0\).
Then (3.7) is again an immediate consequence of Lemma 3.2. To prove (3.8), we use (3.3) and the elementary vector identity
to obtain
By Hypothesis 2.1 (i) we have \(|\nabla _x G(x_i(t),w_i(t))| \ge c\) for \(i=1,2\), and combining the above inequalities with (3.4) we obtain the assertion.
Let us consider now the case
\(\bullet \) \(\dot{\xi }_1(t) \ne 0\), \(\dot{\xi }_2(t) = 0\).
Then \(|A[u_1,w_1](t) - A[u_2,w_2](t)| = A[u_1,w_1](t)\), \(G(x_1(t),w_1(t))-G(x_2(t),w_2(t)) = 1 - G(x_2(t),w_2(t)) \ge 0\), hence
hence (3.7) is fulfilled. We further have similarly as above that
hence (3.8) holds. The remaining case
\(\bullet \) \(\dot{\xi }_1(t) = 0\), \(\dot{\xi }_2(t) \ne 0\)
is analogous, and Lemma 3.3 is proved.
We are now ready to prove the following main result.
Theorem 3.4
Let Hypothesis 3.1 hold, let \(({u_i},{w_i})\in W^{1,1}(0,T; X)\times W^{1,1}(0,T\,; W)\) and \(x_i^0 \in Z({w_i}(0))\) be given for \(i=1,2\), let \(\xi _i \in W^{1,1}(0,T; X)\) be the respective solutions to (2.10)–(2.12) with \(x_i = {u_i}-\xi _i\) for \(i=1,2\). Then for a. e. \(t\in (0,T)\) we have
Proof
By Lemma 3.3, we have
where B[u, w] is defined as in Lemma 3.2. Hence (3.9) follows since from Hypothesis 3.1 and the triangle inequality applied to B[u, w] we infer that
Corollary 3.5
For every \(R>0\) there exists a constant \(C(R)>0\) such that for every \(({u_i},{w_i})\in W^{1,1}(0,T; X)\times W^{1,1}(0,T\,; W)\) and every \(x_i^0 \in Z({w_i}(0))\) for \(i=1,2\) such that \(\max \{\int _0^T|\dot{u}_1(t)|\,\mathrm {d}t, \int _0^T|\dot{w}_1(t)|_W\,\mathrm {d}t\} \le R\), the respective solutions \(\xi _i \in W^{1,1}(0,T; X)\) to (2.10)–(2.12) satisfy the inequality
Proof
In the situation of Theorem 3.4 put \(K_2 = \max \{K_0, K_1\}/c\), and
Then from (3.9) it follows that
We now use Gronwall’s argument and put \(M(t) = \int _0^t m(\tau )\,\mathrm {d}\tau \). It follows from (3.11) that
Integrating from 0 to T we obtain the assertion.
Remark 3.6
The local Lipschitz continuity of the input-output mapping cannot be expected if \(\nabla _x G\) is not Lipschitz even if G is convex. A counterexample is constructed in [15, Theorem 2.2]. On the other hand, the global \(W^{1,1}\)-Lipschitz continuity of the sweeping process holds if Z(w) is a convex polyhedron. This is shown for instance in [9] for Z independent of w, and it is generalized in [17] to the case of non-orthogonal projections to the convex polyhedron, i.e. when the time derivative of \(\xi \) lies in a prescribed cone of admissible directions.
5 Implicit Sweeping Processes
In this section we consider the state dependent problem corresponding to (2.10)–(2.12), where it is assumed that there exists a function \(g: [0,T] \times X \times X \rightarrow W\) such that
More specifically,, given \(u \in W^{1,1}(0,T; X)\) and \(x_0 \in X\) such that \(x_0 \in Z(g(0,u(0),u(0)-x_0))\), one has to find \(\xi \in W^{1,1}(0,T; X)\) such that
Using the Banach contraction principle, we prove that (4.2)–(4.4) is uniquely solvable in \(W^{1,1}(0,T; X)\) under the following assumptions on the function g.
Hypothesis 4.1
A continuous function \(g : [0,T] \times X \times X \rightarrow W\) is given such that its partial derivatives \({\partial _t g, \partial _u g, \partial _\xi g}\) exist and satisfy the inequalities
for every \(u,v,\xi , \eta \in X\) and a. e. \(t\in (0,T)\) with given functions \(a, b\in L^1(0,T)\) and given constants \(\gamma , {\omega }, C_\xi ,C_u >0\) such that
where c, \(K_1\) are as in Hypotheses 2.1 (i) and 3.1.
Let us start our analysis with two auxiliary results.
Lemma 4.2
Let Hypotheses 3.1 and 4.1 hold and let \(\xi \in W^{1,1}(0,T; X)\) satisfy (4.2)–(4.4) with some \(u \in W^{1,1}(0,T; X)\) and some \(x_0 \in X\) such that \(x_0 \in Z(g(0,u(0),u(0)-x_0))\). Then we have
Proof
We set \(w(t) = g(t,u(t),\xi (t))\) for \(t \in [0,T]\). From Hypothesis 4.1 follows that \(w \in W^{1,1}(0,T; W)\), thus \(u, w, \xi \) and \(x_0\) satisfy (2.10)–(2.11) and Lemma 3.2 applies. In particular inequality (4.12) is an easy consequence of (3.5). Indeed, using (4.5), (4.6) we obtain \(|\dot{w}(t)|_W \le a(t) +{\omega } |\dot{u}(t)| + \gamma |\dot{\xi }(t)|\) so that (4.12) follows from (4.11).
Motivated by (4.12), we define for any \(u \in W^{1,1}(0,T; X)\) the set
and prove the following statement.
Lemma 4.3
For all \(u \in W^{1,1}(0,T; X)\) and \(\eta \in \Omega (u)\), the solution \(\xi \in W^{1,1}(0,T; X)\) of (2.10)–(2.12) with \(w(t) = g(t,u(t),\eta (t))\) belongs to \(\Omega (u)\). Moreover, there exist constants \(m_0 > 0\), \(m_1 > 0\) such that for every \(u_1, u_2 \in W^{1,1}(0,T; X)\) and every \(\eta _i \in \Omega (u_i)\), \(i=1,2\), the solutions \(\xi _i \in W^{1,1}(0,T; X)\) of (2.10)–(2.12) with \(w_i(t) = g(t,u_i(t),\eta _i(t))\) and \(x_0^i \in X\) with \(x_0^i \in Z(g(0,{u_i(0),} u_i(0)-x_0^i))\) \(i=1,2\), satisfy for a. e. \(t \in (0,T)\) the inequality
Proof
\(u \in W^{1,1}(0,T; X)\) and \(\eta \in \Omega (u)\) be given. By (3.5), (4.1)–(4.7) and (4.11), we have for a. e. \(t \in (0,T)\) that
hence \(\xi \in \Omega (u)\). To prove (4.14), we notice that the inequalities
hold for a. e. \(t\in (0,T)\) By virtue of Hypothesis 4.1. We now apply Theorem 3.4 and insert the above estimates into (3.9). The estimate (4.14) now follows with constants \(m_0>0\), \(m_1>0\) depending only on \(c, C_0, C_1, K_0, K_1, \gamma , \omega ,C_\xi \), and \(C_u\).
We now prove the main result of this section.
Theorem 4.4
Let Hypotheses 3.1 and 4.1 hold, and let \(u\in W^{1,1}(0,T; X)\) and \(x_0 \in X\) be given such that \(x_0 \in Z(g(0,{u(0),} u(0)-x_0))\). Then there exists a unique solution \(\xi \in \Omega (u)\) to (4.2)–(4.4).
Proof
We proceed by the Banach Contraction Principle. For an arbitrarily given \(u \in W^{1,1}(0,T; X)\) and each \(\eta \in \Omega (u)\) we use Lemma 4.3 to find the solution \(\xi \in W^{1,1}(0,T; X)\) of (2.10)–(2.12) with \(w(t) = g(t,u(t),\eta (t))\). It suffices to prove that the mapping \(S:\Omega (u) \rightarrow \Omega (u):\eta \mapsto \xi \) is a contraction on \(\Omega (u)\).
Let \(\eta _1, \eta _2 \in \Omega (u)\) be given. From (4.14) with \(u_1 = u_2 = u\) it follows that
with \(m(t) = m_0(a(t) + b(t) + |\dot{u}(t)|)\). We have \(m \in L^1(0,T)\), and we may put for \(t \in [0,T]\)
where \(\varepsilon \in (0,1)\) is chosen in such a way that
We multiply (4.15) by \(M_\varepsilon (t)\) and integrate from 0 to T. For simplicity, put
We have
hence,
We use the fact that
and integrating by parts in the right-hand side of (4.18) we obtain
Hence, by virtue of (4.16), the mapping \(S: \Omega (u) \rightarrow \Omega (u): \eta \mapsto \xi \) is a contraction with respect to the complete metric induced on \(\Omega (u)\) by the norm
and we infer the existence of a solution \(\xi \in \Omega (u)\) to (4.2)–(4.4).
Corollary 4.5
Let Hypotheses 3.1 and 4.1 hold. Then the mapping which with \(u\in W^{1,1}(0,T; X)\) and \(x_0 \in Z(g(0,u(0),u(0)-x_0))\) associates the solution \(\xi \in \Omega (u)\) of (4.2)–(4.4) is locally Lipschitz continuous in the sense that for every \(R > 2m_0\int _0^T(a(t)+b(t)) \,\mathrm {d}t\) there exists \(K(R) > 0\) such that if \(u_1, u_2 \in W^{1,1}(0,T; X)\) are given and
then the solutions \(\xi _i \in W^{1,1}(0,T; X)\), \(i=1,2\) to (4.2)–(4.4) associated with the inputs \(u_i\) and initial conditions \(x_0^i\in X\), \(x_0^i \in Z(g(0,u_i(0),u_i(0)-x_0^i))\) for \(i = 1,2\) satisfy the inequality
Proof
By virtue of (4.14) with \(\eta _i = \xi _i\) we have for a. e. \(t\in (0,T)\) that
We proceed as in the proof of Theorem 4.4 choosing \(\varepsilon \in (0,1-\delta )\) and putting for \(t \in [0,T]\)
Note that by (4.20) we have
Multiplying (4.22) by \({\hat{M}}_\varepsilon (t)\) and using the notation (4.17) we obtain after integrating from 0 to T that
On the right-hand side of (4.23) we integrate by parts and obtain
with a constant \(C>0\) independent of R. Thus, as \(0 \le {\hat{M}}(T) \le R\) we obtain the final estimate
with a constant \(C>0\) independent of R, which we wanted to prove.
Remark 4.6
The smallness of \(\partial _\xi g\) in (4.5) is indeed a necessary condition for the existence of a solution of the implicit problem even in 1D with \(Z(t) = [-r(t), r(t)]\), \(r(t) = g(\xi (t))\). It is easy to see that we have existence and uniqueness if \(|g'(\xi )| < 1\), and non-existence if \(g'(\xi ) \le -1\). Furthermore, even in the convex case, the Lipschitz regularity of \(\nabla g\) is a necessary condition for uniqueness in the implicit problem. An example of nonuniqueness is provided in [5, Section 8] when the \(C^{1,1}\)-condition for g is violated.
Remark 4.7
Similar result to Theorem 4.4 is obtained if (4.1) is replaced with
In application to elastoplasticity, \(V_\xi (t)\) corresponds to dissipated energy during the time interval [0, t], which can be considered as a measure of accumulated cyclic fatigue. For example, in [11], the Gurson model for fatigue is based on the assumption that set Z(t) of admissible stresses shrinks as \(V_\xi (t)\) increases.
References
Adly, S., Haddad, T.: An implicit sweeping processes approach to quasistatic evolution variational inequalities. SIAM J. Math. Anal. 50, 761–778 (2018)
Adly, S., Haddad, T., Le, B.K.: State dependent implicit sweeping process in the framework of quasistatic quasi-variational inequalities. J. Optim. Theory Appl. 182, 473–493 (2019)
Adly, S., Nacry, F., Thibault, L.: Preservation of prox-regularity of sets with applications to contrained optimization. SIAM J. Optim. 26, 448–473 (2016)
Adly, S., Nacry, F., Thibault, L.: Discontinuos sweeping processes with prox-regular sets. ESAIM: Control Optim. Calc. Var. 23, 1293–1329 (2017)
Brokate, M., Krejčí, P., Schnabel, H.: On uniqueness in evolution quasivariational inequalities. J. Convex Anal. 11(1), 111–130 (2004)
Clarke, F.H., Ledyaev, YuS, Stern, R.J., Wolenski, P.R.: Nonsmooth Analysis and Control Theory. Springer, New York (1998)
Clarke, F.H., Stern, R.J., Wolenski, P.R.: Proximal smoothness and the lower-\(C^2\) property. J. Convex Anal. 2(1/2), 117–144 (1995)
Colombo, G., Marques, M .D .P.Monteiro: Sweeping by a continuous prox-regular set. J. Diff. Equ. 187, 46–62 (2003)
Desch, W., Turi, J.: The stop operator related to a convex polyhedron. J. Diff. Equ. 157, 329–347 (1999)
Edwards, R.E.: Functional Analysis: Theory and Applications, Holt. Rinehart & Winston, New York (1965)
Gurson, A.L.: Continuum theory of ductile rupture by void nucleation and growth: Part 1 - yield criteria and flow rules for porous ductile media. J. Eng. Mater. Technol. Trans. ASME 99, 2–15 (1977)
Jourani, A., Vilches, E.: Moreau-Yosida regularization of state-dependent sweeping processes with nonregular sets. J. Optim. Theory Appl. 173, 91–116 (2017)
Jourani, A., Vilches, E.: A differential equation approach to implicit sweeping processes. J. Differ. Equ. 266, 5168–5184 (2019)
Krejčí, P.: Vector hysteresis models. Eur. J. Appl. Math. 2, 281–292 (1991)
Krejčí, P.: A remark on the local Lipschitz continuity of vector hysteresis operators. Appl. Math. 46, 1–11 (2001)
Krejčí, P., Monteiro, G.A., Recupero, V.: Non-convex sweeping processes in the space of regulated functions. Submitted
Krejčí, P., Vladimirov, A.: Lipschitz continuity of polyhedral Skorokhod maps. J. Anal. Appl. 20, 817–844 (2001)
Kunze, M., Marques, M.D.P.Monteiro: Existence of solutions for degenerate sweeping processes. J. Convex Anal. 4, 165–176 (1997)
Kunze, M., Marques, M .D .P.Monteiro: On parabolic quasi-variational inequalities and state-dependent sweeping processes. Topol. Methods Nonlinear Anal. 12, 179–191 (1998)
Kurzweil, J.: Generalized ordinary differential equations and continuous dependence on a parameter. Czechoslovak Math. J. 7, 418–449 (1957)
Migórski, S., Sofonea, M., Zeng, S.: Well-posedness of history-dependent sweeping processes. SIAM J. Math. Anal. 51(2), 1082–1107 (2019)
Marques, M. D. P. Monteiro: Differential Inclusions in Nonsmooth Mechanical Problems - Shocks and Dry Friction. Birkhäuser Verlag, Basel, (1993)
Moreau, J.-J.: Rafle par un convexe variable I. Sém. d’Anal. Convexe, Montpellier 1 (1971), Exposé No. 15
Moreau, J.-J.: Evolution problem associated with a moving convex set in a Hilbert space. J. Differ. Equ. 26, 347–374 (1977)
Poliquin, R.A., Rockafellar, R.T., Thibault, L.: Local differentiability of distance functions. Trans. Am. Math. Soc. 352, 5231–5249 (2000)
Thibault, L.: Sweeping process with regular and nonregular sets. J. Differ. Equ. 193, 1–26 (2003)
Thibault, L.: Moreau sweeping process with bounded truncated retraction. J. Convex Anal. 23, 1051–1098 (2016)
Vial, J.-P.: Strong and weak convexity of sets and functions. Math. Oper. Res. 8, 231–259 (1983)
Acknowledgements
The authors are grateful to Giovanni Colombo for motivation to study this problem and for stimulating discussions about the subject. They also thank Florent Nacry and Lionel Thibault for pointing out that Proposition 1.4 was already proved in a different way in their paper [4] with Samir Adly. This remark was also made by an anonymous reviewer who referred us to the papers [3, 4]; we are thankful for her/his encouraging report and further comments which helped to improve the manuscript.
Funding
Open access funding provided by Politecnico di Torino within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supported by the GAČR Grant No. 20-14736S, RVO: 67985840, and by the European Regional Development Fund, Project No. CZ.02.1.01/0.0/0.0/16_019/0000778.
Vincenzo Recupero is a member of GNAMPA-INdAM.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Krejčí, P., Monteiro, G.A. & Recupero, V. Explicit and Implicit Non-convex Sweeping Processes in the Space of Absolutely Continuous Functions. Appl Math Optim 84 (Suppl 2), 1477–1504 (2021). https://doi.org/10.1007/s00245-021-09801-8
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00245-021-09801-8
Keywords
- Evolution variational inequalities
- Sweeping processes
- State-dependent sweeping processes
- Prox-regular sets