
Abstract
Many marine vertebrates traverse more than hundreds of kilometres of the ocean. To efficiently achieve such long-distance movements, the ability to maintain orientation in a three-dimensional space is essential; however, it remains unevaluated in most species. In this study, we examined the bearing distributions of penguins undertaking long-distance foraging trips and compared their bearing consistency between underwater and at the water surface, as well as between night and day, to quantify their orientation ability. The subject species, king penguins, Aptenodytes patagonicus, from Possession Island, Crozet archipelago (46°25′S, 51°45′E; January to March 2011), showed high bearing consistency both during dives and at the water surface whilst commuting towards/from their main foraging area, the Antarctic polar front. Their bearing consistency was particularly high during and after shallow dives, irrespective of the time of day. Meanwhile, their bearings tended to vary during and after deep dives, particularly in the middle of the trip, probably owing to underwater foraging movements. However, the overall directions of deep dives during the commuting phases were similar to those of shallow dives and post-dive periods at the water surface. These findings indicate that king penguins employ compass mechanism(s) that are equivalently reliable both underwater and at the water surface, at any time of the day. This orientation ability appears to enable them to achieve long-distance trips under strong temporal constraints. Further studies on the fine-scale bearing distributions of other diving vertebrates are needed to better understand movement strategies in marine environments.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Many diving animals traverse considerable distances at sea to forage for food in distant places. For such long-distance travels, the ability of orientation in a three-dimensional space is essential. Although a vast number of movement tracks have been collected for marine diving species through intermittent positional recordings at the water surface (e.g. Ropert-Coudert et al. 2020; Hindell et al. 2020), information about their underwater movements and body orientation during long-distance travelling remains lacking. To our knowledge, only two studies, namely on the juvenile northern elephant seals and loggerhead sea turtles, have reported underwater and at-surface orientation patterns in diving species (Narazaki et al. 2009; Matsumura et al. 2011). Both studies found a high concentration of bearings in a specific direction during dives, whereas orientation at the water surface was more variable, likely as a consequence of searching for navigational cues to adjust their travel bearings for subsequent dives (Narazaki et al. 2009; Matsumura et al. 2011). However, no studies have examined diving birds such as penguins, which also travel at sea by swimming.
King penguins, Aptenodytes patagonicus, which breed in sub-Antarctic regions, commute long distances to reach their main foraging grounds, the frontal zones, during the breeding season (Jouventin et al. 1994; Bost et al. 1997, 2015; Pütz et al. 1998, 1999; Trathan et al. 2008). Their breeding colonies are usually situated at oceanic islands, compelling them to travel across several hundreds of kilometres of the seemingly featureless ocean for foraging. As breeding birds must regularly return to land to feed their chick, they require efficient foraging and movement strategies (Charrassin et al. 1998; Watanabe et al. 2023).
Based on their dive profiles, horizontal travelling speeds estimated from at-water-surface positions and estimation of feeding events, a foraging trip was shown to comprise a foraging phase within the frontal zones and commuting phases between the foraging areas and breeding island (Bost et al. 1997; Pütz et al. 1999; Cotté et al. 2007; Trathan et al. 2008; Watanabe et al. 2023). Whilst travelling to and returning from the main foraging area, king penguins continuously undertake shallow dives during both the day and night (Charrassin et al. 1998; Pütz et al. 1998; Trathan et al. 2008), mostly for horizontal transit (Shiomi et al. 2016). However, during the commuting phases, they frequently forage at depths exceeding 100 m during the daytime (Bost et al. 1997; Pütz et al. 1998; Charrassin et al. 2001; Pütz and Cherel 2005). These vertical movements in foraging dives consequently reduce their horizontal travel speed (Watanabe et al. 2023), and underwater pursuits may also temporarily disorient them. Yet, the behavioural and sensory mechanisms by which these penguins can overcome this constraint and how effectively they can orient themselves underwater during travelling and foraging dives, and whether the time of day affects their orientation patterns remain unknown.
In this study, we aimed to evaluate the orientation ability of king penguins and elucidate their movement strategy for long-distance trips at sea. The dive-by-dive and at-surface orientation during foraging trips was examined by recording their body-axis bearing at each second using magnetometers and accelerometers. Specifically, our objectives were to measure bearing consistency during travelling at sea and to test whether and how general orientation patterns differ between underwater movements and periods at the water surface; between day and night travels; as well as between transit and foraging dives. We also explored the similarities and differences in the orientation patterns of diving vertebrates by comparing those of king penguins with those reported for sea turtles and juvenile seals.
Materials and methods
Logger deployment
Field experiments were conducted on Possession Island (46°25′S, 51°45′E; Crozet Archipelago, South Indian Ocean) in 2011, from late January to early March (i.e. the chick-rearing period). Using a rounded hook, nine breeding king penguins, Aptenodytes patagonicus, were caught at the edge of the colony just before departing to forage and were quickly hooded to limit the stress of capture. We confirmed that the birds were breeding by observing that they held a chick and passed it to their mates returning from the sea. A multi-channel data logger (W1000L-3MPD3GT, 132 g in air, 166 mm in length, 26 mm in diameter; Little Leonardo, Japan) was attached to the captured birds using waterproof tape, straight on the vertebral line of the lower back position (Wilson et al. 1997). Stainless steel cables and instant glue were also used to prevent the tapes and loggers from detachment. These attachment materials did not hurt the skin of the birds. The mass of the loggers was 1.1–1.4% of the body mass of the equipped birds (9.3–12.1 kg). All birds fitted with the loggers were released at the beach from which they departed for the sea. During foraging trips, the data loggers recorded depth at 1 Hz, triaxial magnetism at 1 Hz, swimming speed at 1 Hz as the number of rotations of an external propeller, ambient temperature at 1 Hz and triaxial acceleration at 16 Hz, except for two birds (at 8 Hz for K6 and K9). The three axes of the loggers corresponded to the head–tail, left–right and dorso-ventral axis of the birds. On their return from one foraging trip, the birds were recaptured outside the colony or at their nesting position, and the data loggers were removed. Deployment and recovery procedures for each bird took 25–58 min and 7–20 min, respectively. The trip duration of the equipped birds (10.7–22.5 days) was longer than those previously reported for chick-rearing birds with no logger deployment (4–12 days; Bost et al. 2013), but this would not affect the orientation ability investigated in this study.
Initial data processing
All data were analysed using the IGOR Pro software platform (WaveMetrics, USA) with the Ethographer package (Sakamoto et al. 2009). Dives were defined as when birds were submerged for more than 30 s at depths greater than 1 m to avoid wrongly detecting small fluctuations of depth values at the water surface as dives; dives ≤ 40 m were defined as shallow dives, and dives > 40 m were defined as deep dives, in accordance with previous studies (Charrassin et al. 2002; Froget 2004). The main function of shallow dives is considered to be horizontal transit (Shiomi et al. 2016), and that of deep dives is considered to be foraging (Charrassin et al. 1998, 2001; Pütz et al. 1998; Bost et al. 2009; Hanuise et al. 2013), although any of these dives could have both functions at a certain rate. To omit a small number of shallow dives at the beginning of foraging trips, which probably occurred within the bay near the breeding island and were not aimed for transit nor foraging, only the data collected after the first deep dive by each individual were analysed. With this procedure, 0.3–6.9% of the dive records for each bird were removed.
The post-dive period was defined as the period spent at the water surface after surfacing from a dive, with the distinction of post-shallow- and post-deep-dive periods. Surfacing intervals lasting for ≥ 10 min were excluded from the orientation analyses. This was because the shortest post-dive duration for a given dive duration, which is expected to be determined by physiological limitations, ranged up to and around 10 min. Periods longer than 10 min are likely to be breaks between diving bouts rather than recovery from or preparation for dives (cf. Kooyman et al. 1992; Mori et al. 2001).
Daytime was defined as the period between the sunrise and sunset, i.e. times of the day when the top of the sun was on the horizon; night-time was defined as starting 1 h after sunset and ending 1 h before sunrise. Dives during twilight periods before the sunrise and after the sunset, when ambient light levels and diving behaviours gradually change (Bost et al. 2002; Shiomi et al. 2016), were not analysed in this study to simplify the comparison. Information on the sunrise and sunset times was downloaded from the Hydrographic and Oceanographic Department of the Japan Coast Guard website (http://www1.kaiho.mlit.go.jp/KOHO/automail/sun_form3.html).
Bearings were calculated using a customised macro (Narazaki and Shiomi 2010; Shiomi et al. 2010), which considers triaxial magnetism, triaxial acceleration derived from gravity, attachment angles of the loggers for each deployment and the geomagnetic declination (Johnson and Tyack 2003; Sato et al. 2003; Shiomi et al. 2008). This approach allows us to obtain one bearing value per second during the trip. Gravitational components of acceleration were separated using a low-pass filter with a threshold of 0.6875 Hz. This threshold was selected based on the power spectral density of acceleration data, aiming to exclude the acceleration derived from the thrust generated by flipper strokes (Sato et al. 2007). Magnetism data were used after the temperature drift was corrected using the calibration equation obtained for each logger (quadratic function of ambient temperature). The geomagnetic declination value during this breeding season was obtained from the National Oceanic and Atmospheric Administration’s (NOAA) National Centers for Environmental Information website, which is based on the International Geomagnetic Reference Field (IGRF) model (https://www.ngdc.noaa.gov/geomag/calculators/magcalc.shtml#declination).
In this study, the geographic positions of king penguins during an entire trip were not recorded. Although three-dimensional underwater movements were reconstructed from bearings, pitch angles and swim speeds by dead-reckoning, errors of positional estimations accumulate with time (Shiomi et al. 2008; Gunner et al. 2021). Therefore, we used the sunrise/sunset times for the corresponding dates and the geomagnetic declination value estimated for the breeding colony position. As variations in sunrise/sunset times and geomagnetic declinations within a potential range of trips were less than 20 min (see Fig. S1 in Shiomi et al. 2016) and a few degrees, respectively, we considered that the use of data estimated for the geographic position of the colony did not influence the conclusions.
Orientation analysis
For each individual trip, parameters characterising the bearing distributions were calculated at two different time scales (i.e. during each dive/post-dive period and during each daytime/night-time phase). Circular analyses and statistical tests were performed using functions implemented in IGOR Pro by referring to Zar (2013). The results of the tests were considered to be significant at P < 0.05. First, the mean bearing and length of the mean vector (an index of consistency of bearings) were obtained for each dive and each post-dive period spent at the water surface. The mean vector length of 0 indicates a uniform distribution around a circle, and 1 indicates that all calculated bearings are distributed in the same direction. Second, to examine the general patterns of bearing distributions, the grand mean bearings and the lengths of grand mean vectors were calculated for each of the daytime and night-time phases. The grand mean vector lengths are affected by both variances of bearings within dives/post-dive periods and the variances of mean bearings within daytime/night-time phases. Therefore, arithmetic mean values of the mean vector lengths were also calculated for each daytime and night-time phase as an index of within-dive/within-post-dive-period directionality. The non-uniformity of the mean bearings was tested using a nonparametric second-order analysis (Moore’s modified Rayleigh test), where the null hypothesis corresponds to a uniform distribution around a circle. The lengths of the mean vectors for each dive were compared for each daytime/night-time phase between (i) shallow and deep dives, (ii) between post-dive periods after shallow and deep dives, and (iii) between dives and post-dive periods (nonparametric Wilcoxon–Mann–Whitney two-sample rank test).
Results
The time-series bearings of sea-traversing king penguins, Aptenodytes patagonicus, were successfully recorded for six of the nine birds deployed with loggers. Of the three birds that did not provide data usable for this study, loggers attached to two birds (K2 and K8) exhibited technical problems that prevented bearing calculations, and one bird (K7) did not leave the colony, and thus could not be included in the study.
The number of analysed dives for each individual was 1134−3538 (Table 1). As deep dives were rarely performed at night in all birds, we did not separately analyse shallow and deep nocturnal dives. Data from one bird (K6) spanned its whole foraging trip for 11.6 days, whilst those from the other five birds covered approximately 30−90% of their foraging trips because of limitations in the recording duration of the loggers (Table 1). For two of these five individuals (K4 and K9), the latter part of the trip was partly recorded.
Using this unique dataset, we examined how well the king penguins maintain their orientation when travelling at sea, the differences in bearing consistency between underwater movements and periods at the water surface as well as between the day and night-time. Differences in bearing consistency between transit and foraging phases were also described.
Mean bearings
In all individuals, the mean swimming bearings during both shallow and deep dives were not uniformly distributed in all the daytime/night-time phases with only one exception (Moore’s modified Rayleigh test, P < 0.001; Table S1; N = 51 daytime phases and 45 night-time phases). At the scale of the trip, the grand mean bearings generally oriented southward until they turned northward in the latter part of the trip; this was the case for both shallow and deep dives, and during both night and day (Figs. 1a and 2a, Fig. S1a). However, in two birds, K1 and K4, the grand mean bearings gradually changed clockwise (Fig. 2d, Fig. S1a).

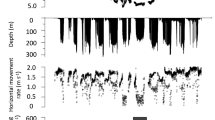
a Distribution of the mean bearings of the individual dive and post-dive period, during the different stages (outward, middle and inward) of the full trip of bird K6. Each pair of circles illustrates the distribution during a single phase (day or night), for three different categories: during the night, daytime shallow dives and daytime deep dives. The illustrated vector indicates the length and orientation of the grand mean vector, whilst the radius position (ranging from 0 to 1) of each data point indicates the length of the mean vector. The data points located farther from the centre of the circle indicate a more concentrated bearing distribution. b Example of a single deep dive showing re-orientation of the dive path in the ascent phase, after tortuous foraging movements during the bottom phase of the dive. The path was reconstructed by dead-reckoning (Johnson and Tyack 2003; Shiomi et al. 2010; Narazaki and Shiomi 2010) and is represented in a horizontal view (on the left) and a three-dimensional view (on the right). Colours of the track indicate the swim speed

a, d Grand mean bearing, b, e grand mean vector length, and c, f mean value of the length of the mean vector for each dive and post-dive period, obtained for each daytime (orange) and night-time (black) phase. The values for shallow dives (solid circles), deep dives (solid triangles), post-dive periods after shallow dives (open circles), and post-dive periods after deep dives (open triangles) are displayed separately. These data comprise the logger records of two individuals (a–c: bird K6, full trip; d–f: bird K4, 68% of the trip). Dashed lines indicate the halfway mark of the whole trip. Markings “n.s.” indicate that the statistical test did not reject the null hypothesis that mean bearings are distributed uniformly, i.e. no significant grand mean bearing (Moore’s modified Rayleigh test, P ≥ 0.05), and “n.a.” indicate that statistical tests could not be applied because of a small number of data points (≤ 3). The numbers of dives and post-dive periods within each phase and results of statistical tests are shown in Table S1
Similar to what was seen during the diving activity, the mean bearings for post-dive periods were not uniformly distributed except for post-deep-dive periods in two daytime phases (Day 1 in K4, Day 9 in K9) (Moore’s modified Rayleigh test, P < 0.001; Table S1). In addition, the grand mean bearings at the water surface were oriented in similar directions to those when they dived within the respective phase (Figs. 1a, 2a, d, Fig. S1a).
Concentration of bearings
The lengths of the mean vectors, i.e. the index of directionality, were generally close to 1 for shallow dives both during the daytime and night-time (means for daytime phases > 0.95, for night-time phases > 0.93; Fig. 2c, f, Fig. S1c). The mean vector lengths for daytime shallow dives were significantly longer than those for deep dives (one-tailed nonparametric Wilcoxon–Mann–Whitney two-sample rank test, P < 0.001; Table S1, Fig. 2b, c, e, f, Fig. S1b and S1c).
Further, for post-dive periods, the lengths of the mean vectors were relatively long after shallow dives both during the daytime and night-time (mean values for daytime phases > 0.81, for night-time phases > 0.72; Fig. 2c, f, Fig. S1c). The lengths of mean vectors for post-shallow-dive periods were significantly longer than those for post-deep-dive periods (one-tailed nonparametric Wilcoxon–Mann–Whitney two-sample rank test, P < 0.001; Table S1, Fig. 2b, c, e, f, Fig. S1b and S1c). However, when compared to those of the dives, the mean vector lengths for post-dive periods were significantly shorter except for a few phases (one-tailed nonparametric Wilcoxon–Mann–Whitney two-sample rank test, P < 0.05; Table S1).
According to the data of deep dives and post-deep-dive periods from three birds (K4, K6 and K9), for which the recording appeared to cover the whole outward and a part of the inward travels, both the lengths of the mean vectors and the length of the grand mean vectors for daytime phases became relatively short around the middle part of the trips (Figs. 1a, 2b, c, e, f, Fig. S1b and S1c). However, most of the mean values of the mean vector lengths for post-dive periods were still close to 1, whereas the lengths of grand mean vectors were much shorter. This indicates that the mean bearings varied amongst post-dive periods, whilst the bearings within the respective post-dive periods were consistent.
Discussion
To our knowledge, this is the first study of its kind to have examined the general patterns of penguin orientation during foraging trips both underwater and at the water surface. The results showcase the fine-scale recording of the penguins’ bearings as they travelled long distances across the ocean and provide clear evidence of their ability to maintain global orientation whilst swimming underwater and floating at the water surface, irrespective of the time of day.
Bearing consistency during commuting
The king penguins, Aptenodytes patagonicus, typically oriented themselves southward, that is, towards the predictable foraging area (the polar front), in the first part of journey, and northward (homeward) in the latter part of journey, both during the daytime and night-time. This orientation pattern was observed not only during shallow dives, which have been considered to be performed mainly for horizontal transit, but also during deep foraging dives, suggesting that king penguins continuously reoriented themselves after tortuous movements associated with searching and feeding prey (e.g. Fig. 1b). Thus, maintenance of travelling directions throughout the day was found to be fundamental to this species during commuting towards the productive area or breeding colony, even whilst undertaking foraging along the way.
Moreover, when surfacing after their dives, the king penguins systematically oriented themselves in directions similar to those observed during dives, both during the day and at night. They might be doing this to maintain their course whilst they physiologically recovered from the previous dive and prepared for the next dive. It may also be possible that they swam some distance at the water surface; however, our data loggers cannot measure swim speeds out of the water. The lower degree of bearing concentration during the post-dive periods compared to that during dives might be attributed to several variables, such as ocean currents/waves, preening, re-orientation, turning movements (Narazaki et al. 2021), and/or errors in bearing estimation caused by these irregular movements (cf. Shiomi et al. 2010).
Inter-individual differences were observed to some degree in the time-series grand mean bearings of dives and post-dive periods. These differences might be associated with some internal and external conditions, such as the movement strategy of each bird, breeding stages, prey distribution and ocean currents. For example, gradual changes in the grand mean bearings of two birds, K1 and K4, might indicate circular trips, which were reported as an alternative foraging strategy to direct trips (Jouventin et al. 1994; Scheffer et al. 2010) and/or may have been influenced by ocean current drifts.
Bearing variation during and after foraging dives
The bearings of king penguins tend to be less consistent during deep dives when compared to those during shallow dives. This was particularly obvious around the middle part of the trips (probably near or within the polar front). Upon reaching the primary foraging areas, the motivation for horizontal transit is expected to be reduced, and the directionality of swimming decreases with a shift towards intensive foraging activity in the depths. Our result corroborate previous reports of decreases in horizontal travelling speeds and increases in area-restricted searches within the frontal zones, which were estimated from at-surface positions (Bost et al. 1997; Cotté et al. 2007; Trathan et al. 2008). It should be noted, however, that the bearing estimation using magnetometer and accelerometer becomes less accurate when rapid and/or irregular movements like prey pursuits occur (cf. Shiomi et al. 2010). This could at least partly explain the lower consistency of bearings for deep dives. Another potential factor affecting bearing distributions might be ocean currents that are stronger in the polar front than in the transit phase areas, even though the current speeds within the foraging area of king penguins from Crozet colony are generally much smaller than their horizontal travelling speeds (0.23–0.31 vs. 3.9–6.4 km h−1; Cotté et al. 2007).
We also observed that for post-dive periods, the bearings were more variable after deep dives than after shallow dives. After resurfacing from deep foraging dives, the bearing consistency may be reduced by directional searching/scanning to compensate for underwater disorientation, re-orientation to the prey patch encountered in previous dives, or the longer durations required for recovery and preparation. However, comparison of the arithmetic mean and the grand mean values of the mean vector length suggested that bearings within each post-dive period were relatively constant, whereas the direction to which the bearings were kept varied amongst periods. Therefore, rather than active changes in bearings for searching/scanning directional cues at the water surface, the lack of strong motivation to maintain bearings in a specific direction appeared to explain the shorter length of the grand mean vectors within the main foraging area.
What cues are used to maintain orientation?
The mean vector lengths for post-dive periods appeared to be generally higher than those reported in a previous study focussing on juvenile northern elephant seals (between 0.6 and 0.8 on average; see Fig. 4 in Matsumura et al. 2011). The orientation patterns of other air-breathing divers (seals, sea turtles) suggested that bearings at the surface varied as the animals searched for cues and adjusted their travelling directions accordingly (Narazaki et al. 2009; Matsumura et al. 2011). The higher bearing consistency on the water surface observed in the king penguins may be attributed to differences in the mechanisms employed for at-sea orientation amongst species and/or amongst navigational situations as both the seals and sea turtles were artificially transported and released at sea to collect the movement data and were suggested to partly use the coastal landscape as a navigational cue at the sea surface.
It remains unknown as to what environmental cues king penguins use to keep themselves oriented towards specific directions whilst both swimming underwater and staying at the water surface. This pelagic species travels across open ocean areas far from any coastline where the water depth is much deeper than their maximum diving depths. Therefore, the cues for orientation are unlikely to be land or benthic topography, which was suggested to be used by seals, sea turtles and an inshore penguin species (Narazaki et al. 2009; Matsumura et al. 2011; Mattern et al. 2013). In offshore areas, geomagnetic cues might be used to obtain directional information both underwater and at the water surface as in migratory birds (e.g. Mouritsen et al. 2004); and celestial cues (i.e. sun, stars) might also help, at least when surfacing, as experimentally and theoretically shown for flying birds (e.g. Schmidt-Koenig 1960; Guilford and Taylor 2014). In contrast to passerine or even insect models, where it is possible to test directional cues by an experimental approach under controlled conditions (e.g. Emlen and Emlen 1966; el Jundi et al. 2016), the feasible way to address it for pelagic species is to refine the bio-logging approach of the free-living animal in its natural environment. We need then to improve the accuracy of trajectory measurements especially during dives, combined with measurements of the local physical environment, so that we can more deeply explore at-sea behaviours and also simulate the different ways in which these diving animals orient themselves (e.g. Åkesson and Bianco 2017).
Conclusion
Our findings from bearing analyses confirm that there are distinct commuting phases in the foraging trips of king penguins, Aptenodytes patagonicus, as demonstrated in previous studies (Jouventin et al. 1994; Bost et al. 1997; Trathan et al. 2008; Watanabe et al. 2023). Furthermore, we demonstrated that the penguins balance both horizontal transit for a trip and foraging activity within a dive by keeping their mean bearings directed towards the destination of the trips even during deep foraging dives. The ability of the king penguins to consistently maintain their orientation during dives and post-dive periods both during the day and night likely enables them to efficiently explore distant foraging areas, which is particularly useful given the strict time constraints imposed by their breeding activities and inability to fly. Although more investigations are required to determine how precisely king penguins can pinpoint their destination site, the present results reveal that they have compass mechanism(s) that are equivalently reliable both underwater and at the water surface and at any time of the day. This orientation ability was found to be comparable to that of sea turtles and seals, but the high consistency of bearings during post-dive periods was unique to the king penguins. Thus, this study warrants future investigation on the at-sea bearings of more diving species to provide general knowledge into the ability and mechanisms of three-dimensional orientation and navigation in marine environments. This would consequently help elucidate their long-distance movement strategies.
Data availability
The datasets analysed during the current study are available on request at the Arctic Data archive System (ADS) of the National Institute of Polar Research (https://ads.nipr.ac.jp/dataset/A20220624-003). Time-series data of bearing, depth, triaxial magnetism and triaxial acceleration are included.
References
Åkesson S, Bianco G (2017) Route simulations, compass mechanisms and long-distance migration flights in birds. J Comp Physiol A 203:475–490. https://doi.org/10.1007/s00359-017-1171-y
Bost CA, Georges JY, Guinet C, Cherel Y, Pütz K, Charrassin JB, Handrich Y, Zorn T, Lage J, Le Maho Y (1997) Foraging habitat and food intake of satellite-tracked king penguins during the austral summer at Crozet Archipelago. Mar Ecol Prog Ser 150:21–33. https://doi.org/10.3354/meps150021
Bost CA, Zorn T, Le Maho Y, Duhamel G (2002) Feeding of diving predators and diel vertical migration of prey: king penguin ‘diet versus trawl sampling at Kerguelen islands. Mar Ecol Prog Ser 227:51–62. https://doi.org/10.3354/meps227051
Bost CA, Cotté C, Bailleul F, Cherel Y, Charrassin JB, Guinet C, Ainley DG, Weimerskirch H (2009) The importance of oceanographic fronts to marine birds and mammals of the southern oceans. J Mar Syst 78:363–376. https://doi.org/10.1016/j.jmarsys.2008.11.022
Bost CA, Delord K, Barbraud C, Cherel Y, Pütz K, Cotté C, Peron C, Weimerskirch H (2013) King penguin (Aptenodytes patagonicus). In: García Borboroglu P, Boersma PD (eds) Penguins: natural history and conservation. University of Washington Press, Washington, pp 7–19
Bost CA, Cotté C, Terray P, Barbraud C, Bon C, Delord K, Gimenez O, Handrich Y, Naito Y, Guinet C, Weimerskirch H (2015) Large-scale climatic anomalies affect marine predator foraging behaviour and demography. Nat Commun 6:8220. https://doi.org/10.1038/ncomms9220
Charrassin JB, Bost CA, Pütz K, Lage J, Dahier T, Zorn T, Le Maho Y (1998) Foraging strategies of incubating and brooding king penguins Aptenodytes patagonicus. Oecologia 114:194–201. https://doi.org/10.1007/s004420050436
Charrassin JB, Kato A, Handrich Y, Sato K, Naito Y, Ancel A, Bost CA, Gauthier-Clerc M, Ropert-Coudert Y, Le Maho Y (2001) Feeding behaviour of free-ranging penguins determined by oesophageal temperature. Proc Biol Sci 268:151–157. https://doi.org/10.1098/rspb.2000.1343
Charrassin JB, Le Maho Y, Bost CA (2002) Seasonal changes in the diving parameters of king penguins (Aptenodytes patagonicus). Mar Biol 141(3):581–589. https://doi.org/10.1007/s00227-002-0843-4
Cotté C, Park YH, Guinet C, Bost CA (2007) Movements of foraging king penguins through marine mesoscale eddies. Proc Biol Sci 274:2385–2391. https://doi.org/10.1098/rspb.2007.0775
el Jundi B, Foster JJ, Khaldy L, Byrne MJ, Dacke M, Baird E (2016) A snapshot-based mechanism for celestial orientation. Curr Biol 26(11):1456–1462. https://doi.org/10.1016/j.cub.2016.03.030
Emlen ST, Emlen JT (1966) A technique for recording migratory orientation of captive birds. Auk 83(3):361–367. https://doi.org/10.2307/4083048
Froget G (2004) Heart rate and energetics of free-ranging king penguins (Aptenodytes patagonicus). J Exp Biol 207:3917–3926. https://doi.org/10.1242/jeb.01232
Guilford T, Taylor GK (2014) The sun compass revisited. Anim Behav 97:135–143. https://doi.org/10.1016/j.anbehav.2014.09.005
Gunner RM, Holton MD, Scantlebury MD, van Schalkwyk OL, English HM, Williams HJ, Hopkins P, Quintana F, Gómez-Laich A, Börger L, Redcliffe J, Yoda K, Yamamoto T, Ferreira S, Govender D, Viljoen P, Bruns A, Bell SH, Marks NJ, Bennett NC, Tonini MH, Duarte CM, van Rooyen MC, Bertelsen MF, Tambling CJ, Wilson RP (2021) Dead-reckoning animal movements in R: a reappraisal using Gundog.Tracks. Anim Biotelemetry 9:23. https://doi.org/10.1186/s40317-021-00245-z
Hanuise N, Bost CA, Handrich Y (2013) Optimization of transit strategies while diving in foraging king penguins. J Zool 290:181–191. https://doi.org/10.1111/jzo.12026
Hindell MA, Reisinger RR, Ropert-Coudert Y, Hückstädt LA, Trathan PN, Bornemann H, Charrassin J-B, Chown SL, Costa DP, Danis B, Lea M-A, Thompson D, Torres LG, Van de Putte AP, Alderman R, Andrews-Goff V, Arthur B, Ballard G, Bengtson J, Bester MN, Blix AS, Boehme L, Bost C-A, Boveng P, Cleeland J, Constantine R, Corney S, Crawford RJM, Dalla Rosa L, de Bruyn PJN, Delord K, Descamps S, Double M, Emmerson L, Fedak M, Friedlaender A, Gales N, Goebel ME, Goetz KT, Guinet C, Goldsworthy SD, Harcourt R, Hinke JT, Jerosch K, Kato A, Kerry KR, Kirkwood R, Kooyman GL, Kovacs KM, Lawton K, Lowther AD, Lydersen C, Lyver PO, Makhado AB, Márquez MEI, McDonald BI, McMahon CR, Muelbert M, Nachtsheim D, Nicholls KW, Nordøy ES, Olmastroni S, Phillips RA, Pistorius P, Plötz J, Pütz K, Ratcliffe N, Ryan PG, Santos M, Southwell C, Staniland I, Takahashi A, Tarroux A, Trivelpiece W, Wakefield E, Weimerskirch H, Wienecke B, Xavier JC, Wotherspoon S, Jonsen ID, Raymond B (2020) Tracking of marine predators to protect Southern Ocean ecosystems. Nature 580:87–92. https://doi.org/10.1038/s41586-020-2126-y
Johnson MP, Tyack PL (2003) A digital acoustic recording tag for measuring the response of wild marine mammals to sound. IEEE J Oceanic Eng 28:3–12. https://doi.org/10.1109/JOE.2002.808212
Jouventin P, Capdeville D, Cuenotchaillet F, Boiteau C (1994) Exploitation of pelagic resources by a non-flying seabird—satellite tracking of the king penguin throughout the breeding cycle. Mar Ecol Prog Ser 106:11–20. https://doi.org/10.3354/meps106011
Kooyman GL, Cherel Y, Le Maho Y, Croxall JP, Thorson PH, Ridoux V, Kooyman CA (1992) Diving behavior and energetics during foraging cycles in king penguins. Ecol Monogr 62:143–163. https://doi.org/10.2307/2937173
Matsumura M, Watanabe YY, Robinson PW, Miller PJO, Costa DP, Miyazaki N (2011) Underwater and surface behavior of homing juvenile northern elephant seals. J Exp Biol 214:629–636. https://doi.org/10.1242/jeb.048827
Mattern T, Ellenberg U, Houston DM, Lamare M, Davis LS, van Heezik Y, Seddon PJ (2013) Straight line foraging in yellow-eyed penguins: New insights into cascading fisheries effects and orientation capabilities of marine predators. PLoS ONE 8:e84381. https://doi.org/10.1371/journal.pone.0084381
Mori Y, Yoda K, Sato K (2001) Defining dive bouts using a sequential differences analysis. Behaviour 138:1451–1466. https://doi.org/10.1163/156853901317367690
Mouritsen H, Feenders G, Liedvogel M, Kropp W (2004) Migratory birds use head scans to detect the direction of the Earth’s magnetic field. Curr Biol 14:1946–1949. https://doi.org/10.1016/j.cub.2004.10.025
Narazaki T, Sato K, Abernathy KJ, Marshall GJ, Miyazaki N (2009) Sea turtles compensate deflection of heading at the sea surface during directional travel. J Exp Biol 212:4019–4026. https://doi.org/10.1242/jeb.034637
Narazaki T, Shiomi K (2010) Reconstruction of 3-D path (ThreeD_path). http://japan-biologgingsci.org/home/macro/threed_path/. Accessed 9 Sept 2019
Narazaki T, Nakamura I, Aoki K, Iwata T, Shiomi K, Luschi P, Suganuma H, Meyer CG, Matsumoto R, Bost CA, Handrich Y, Amano M, Okamoto R, Mori K, Ciccione S, Bourjea J, Sato K (2021) Similar circling movements observed across marine megafauna taxa. iScience 24(4):102221. https://doi.org/10.1016/j.isci.2021.102221
Pütz K, Cherel Y (2005) The diving behaviour of brooding king penguins (Aptenodytes patagonicus) from the Falkland Islands: variation in dive profiles and synchronous underwater swimming provide new insights into their foraging strategies. Mar Biol 147:281–290. https://doi.org/10.1007/s00227-005-1577-x
Pütz K, Wilson RP, Charrassin J-B, Raclot T, Lage J, Le Maho Y, Kierspel MAM, Culik BM, Adelung D (1998) Foraging strategy of king penguins (Aptenodytes patagonicus) during summer at the Crozet islands. Ecology 79:1905–1921. https://doi.org/10.2307/176698
Pütz K, Ropert-Coudert Y, Charrassin JB, Wilson RP (1999) Foraging areas of king penguins Aptenodytes patagonicus breeding at Possession Island, Southern Indian Ocean. Mar Ornithol 27:77–84
Ropert-Coudert Y, Van de Putte AP, Reisinger RR, Bornemann H, Charrassin JB, Costa DP, Danis B, Hückstädt LA, Jonsen ID, Lea MA, Thompson D, Torres LG, Trathan PN, Wotherspoon S, Ainley DG, Alderman R, Andrews-Goff V, Arthur B, Ballard G, Bengtson J, Bester MN, Blix AS, Boehme L, Bost CA, Boveng P, Cleeland J, Constantine R, Crawford RJM, Dalla Rosa L, Nico de Bruyn PJ, Delord K, Descamps S, Double M, Emmerson L, Fedak M, Friedlaender A, Gales N, Goebel M, Goetz KT, Guinet C, Goldsworthy SD, Harcourt R, Hinke JT, Jerosch K, Kato A, Kerry KR, Kirkwood R, Kooyman GL, Kovacs KM, Lawton K, Lowther AD, Lydersen C, Lyver POB, Makhado AB, Márquez MEI, McDonald BI, McMahon CR, Muelbert M, Nachtsheim D, Nicholls KW, Nordøy ES, Olmastroni S, Phillips RA, Pistorius P, Plötz J, Pütz K, Ratcliffe N, Ryan PG, Santos M, Southwell C, Staniland I, Takahashi A, Tarroux A, Trivelpiece W, Wakefield E, Weimerskirch H, Wienecke B, Xavier JC, Raymond B, Hindell MA (2020) The retrospective analysis of Antarctic tracking data project. Sci Data 7:1–11. https://doi.org/10.1038/s41597-020-0406-x
Sakamoto KQ, Sato K, Ishizuka M, Watanuki Y, Takahashi A, Daunt F, Wanless S (2009) Can ethograms be automatically generated using body acceleration data from free-ranging birds? PLoS ONE 4(4):e5379. https://doi.org/10.1371/journal.pone.0005379
Sato K, Mitani Y, Cameron MF, Siniff DB, Naito Y (2003) Factors affecting stroking patterns and body angle in diving Weddell seals under natural conditions. J Exp Biol 206(9):1461–1470. https://doi.org/10.1242/jeb.00265
Sato K, Watanuki Y, Takahashi A, Miller PJO, Tanaka H, Kawabe R, Ponganis PJ, Handrich Y, Akamatsu T, Watanabe Y, Mitani Y, Costa DP, Bost C-A, Aoki K, Amano M, Trathan P, Shapiro A, Naito Y (2007) Stroke frequency, but not swimming speed, is related to body size in free-ranging seabirds, pinnipeds and cetaceans. Proc Biol Sci 274:471–477. https://doi.org/10.1098/rspb.2006.0005
Scheffer A, Trathan PN, Collins M (2010) Foraging behaviour of king penguins (Aptenodytes patagonicus) in relation to predictable mesoscale oceanographic features in the Polar Front Zone to the north of South Georgia. Prog Oceanogr 86(1–2):232–245. https://doi.org/10.1016/j.pocean.2010.04.008
Schmidt-Koenig K (1960) The sun azimuth compass: one factor in the orientation of homing pigeons. Science 131:826–828. https://doi.org/10.1126/science.131.3403.826
Shiomi K, Sato K, Mitamura H, Arai N, Naito Y, Ponganis PJ (2008) Effect of ocean current on the dead-reckoning estimation of 3-D dive paths of emperor penguins. Aquat Biol 3:265–270. https://doi.org/10.3354/ab00087
Shiomi K, Narazaki T, Sato K, Shimatani K, Arai N, Ponganis PJ, Miyazaki N (2010) Data-processing artefacts in three-dimensional dive path reconstruction from geomagnetic and acceleration data. Aquat Biol 8:299–304. https://doi.org/10.3354/ab00239
Shiomi K, Sato K, Handrich Y, Bost CA (2016) Diel shift of king penguin swim speeds in relation to light intensity changes. Mar Ecol Prog Ser 561:233–243. https://doi.org/10.3354/meps11930
Trathan PN, Bishop C, Maclean G, Brown P, Fleming A, Collins MA (2008) Linear tracks and restricted temperature ranges characterise penguin foraging pathways. Mar Ecol Prog Ser 370:285–294. https://doi.org/10.3354/meps07638
Watanabe H, Shiomi K, Sato K, Bost CA, Handrich Y (2023) King penguins adjust their fine-scale travelling and foraging behaviours to spatial and diel changes in feeding opportunities. Mar Biol 170:29. https://doi.org/10.1007/s00227-022-04170-4
Wilson RP, Pütz K, Peters G, Culik BM, Scolaro JA, Charrassin J-B, Ropert-Coudert Y (1997) Long-term attachment of transmitting and recording devices to penguins and other seabirds. Wildl Soc Bull 25:101–106
Zar JH (2013) Biostatistical analysis: Pearson new international edition. Pearson, London
Acknowledgements
We are grateful to all the members of Mission 48 in the Crozet Archipelago, especially Marguerite Netchaieff, Astrid Willener and Antoine Joris for their assistance in the field. We also thank Yusuke Goto for providing advice on the data analyses and four anonymous reviewers for their constructive comments to improve the manuscript. Data collection was supported financially and logistically by the Institut Polaire Français Paul-Emile Victor (IPEV, Programme “Oiseaux Plongeurs”, No. 394, Leadership C.A.B.), the Zone Atelier Antarctique (CNRS), the Terres Australes et Antarctiques Françaises and Bio-Logging Science at the University of Tokyo (UTBLS). Manuscript preparation was financially supported by JSPS KAKENHI (JP16H06541, 21H02557) and Frontier Research Institute for Interdisciplinary Sciences, Tohoku University.
Funding
Data collection was supported financially and logistically by the Institut Polaire Français Paul-Emile Victor (IPEV, programme “Oiseaux Plongeurs”, No. 394, Leadership C.A.B.), the Terres Australes et Antarctiques Françaises, and Bio-Logging Science at the University of Tokyo (UTBLS). Manuscript preparation was financially supported by JSPS KAKENHI (JP16H06541, 21H02557) and Frontier Research Institute for Interdisciplinary Sciences, Tohoku University.
Author information
Authors and Affiliations
Contributions
Conceptualization, formal analysis and writing—Original draft, KShiomi; Project administration, KSato, CAB; Investigation, KShiomi, YH; Writing—Review and editing, KShiomi, KSato, YH and CAB; Funding acquisition, KShiomi, KSato, CAB. All authors have read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Ethical approval
All procedures were reviewed and approved by the ethics committee of the IPEV, the French Environment Ministry and the Office for Life Science Research Ethics and Safety, the University of Tokyo (No. P10-26).
Additional information
Responsible Editor: V. Paiva.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Shiomi, K., Sato, K., Bost, C.A. et al. Stay the course: maintenance of consistent orientation by commuting penguins both underwater and at the water surface. Mar Biol 170, 42 (2023). https://doi.org/10.1007/s00227-023-04186-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00227-023-04186-4