
Abstract
The expanding development of offshore wind farms brings a growing concern about the human impact on seabirds. To assess this impact a better understanding of offshore bird abundance is needed. The aim of this study was to investigate offshore bird abundance in the breeding season and model the effect of temporally predictable environmental variables. We used a bird radar, situated at the edge of a wind farm (52.427827° N, 4.185345° E), to record hourly aerial bird abundance at the North Sea near the Dutch coast between May 1st and July 15th in 2019 and 2020, of which 1879 h (51.5%) were analysed. The effect of sun azimuth, week in the breeding season, and astronomic tide was evaluated using generalized additive modelling. Sun azimuth and week in the breeding season had a modest and statistically significant (p < 0.001) effect on bird abundance, while astronomic tide did not. Hourly predicted abundance peaked after sunrise and before sunset, and abundance increased throughout the breeding season until the end of June, after which it decreased slightly. Though these effects were significant, a large portion of variance in hourly abundance remained unexplained. The high variability in bird abundance at scales ranging from hours up to weeks emphasizes the need for long-term and continuous data which radar technology can provide.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The Dutch Continental Shelf (DCS) of the North Sea is home to ecologically diverse avian species that fluctuate in number and composition year-round (Camphuysen and Leopold 1994; Fijn et al. 2018) and utilize the intertidal, coastal, and pelagic areas of the DCS to roost and forage. The DCS is also heavily exploited through human activities including fisheries, shipping, gas extraction, and increasingly wind farm development (Rijksoverheid 2015). As wind farm development is expanding on the North Sea, especially in coastal waters, the concern for its effect on birds utilizing the area has grown, as is seen in the growing field of research (Desholm and Kahlert 2005; Hüppop et al. 2006; Garthe et al. 2017; Thaxter et al. 2018; Vanermen et al. 2019). In spring and summer central place foraging colonial seabirds, such as gulls and terns, commute regularly between breeding sites onshore and foraging grounds at sea (Wetterer 1989; Fryxell and Lundberg 1998). Due to this foraging strategy, coastal seabirds may have recurrent encounters with offshore wind farms by which they may be impacted (Drewitt and Langston 2006; Lindeboom et al. 2011). Additionally, a meta-analysis by Dierschke et al. (2016) on interactions between seabirds and wind farms on the North Sea identified species that appear to be generally attracted towards wind farms, including the lesser black-backed gull (Larus fuscus) and the European herring gull (Larus argentatus), which are among the most abundant species on the DCS around this time of year (Camphuysen and Leopold 1994), further increasing concern for these species.
While it is clear birds are impacted by offshore wind farm development, the scope of this impact is difficult to assess as information on temporal fluctuations of offshore bird abundance is lacking due to inherent limitations of various monitoring techniques. On the North Sea, visual observations through ship surveys (Camphuysen and Leopold 1994), airplane surveys (Fijn et al. 2018), and stations along the coast (Camphuysen and Dijk 1983) have been used to determine bird species distribution and abundance year-round. This provides information on a broad range of species active during daylight hours and this information has been combined into global species distribution maps (Halpin et al. 2009). However, due to the often high logistic costs of ship and aerial surveys, and the obvious geographical constraints of coastal bird monitoring, large temporal and/or spatial gaps exist that can make accurate offshore distribution estimations difficult. Radar is a remote sensing technology which has been applied to monitor avian abundance and flight characteristics at sea (Lack 1959; Hüppop et al. 2006; Plonczkier and Simms 2012; Fijn et al. 2015). Although limited in range, bird radar can monitor bird abundance and flight characteristics within an observation area at a high spatio-temporal resolution for extended periods of time, enabling research on factors that influence both short- and long-term temporal patterns in offshore abundance. In particular, the effect of highly predictable external variables on bird abundance is of interest, as their predictable nature can structurally affect bird behaviour and can be taken into account when assessing bird-wind farm interactions.
Three external variables that are highly predictable and have been noted to affect the behaviour of coastal seabirds are daylight availability, the time of year, and the tide. Daylight availability is important for visual foragers and the daily rhythm of animals, including central place foragers such as seabirds (Fryxell and Lundberg 1998; Shealer 2002). The time of year affects the breeding stage of animals. During the different breeding stages, some species may adjust their foraging effort and behaviour. For example, lesser black-backed gulls from coastal breeding colonies in the Netherlands (Camphuysen et al. 2015) and the UK (Thaxter et al. 2015) have been found to increase the proportion of time spent at sea during chick-rearing, and some herring gulls on Texel switch to marine diets during chick-rearing (van Donk et al. 2017). Lastly, the tide impacts the sea currents and can create foraging opportunities at sea through upwelling. For example, the common tern (Sterna hirundo) and roseate tern (Sterna dougallii) use upwelling caused by tidal currents to access prey (Urmy and Warren 2018).
The aim of this study is to investigate hourly fluctuations in non-migratory aerial bird abundance (henceforth, bird abundance) near an offshore wind farm and analyse the effect of the aforementioned external variables with predictable temporal variation on this abundance (daylight availability, time of year, and tide). Particularly, we are interested in local movements of birds at sea during the breeding season, when colonial seabirds forage and commute between their colonies and the feeding areas at sea. We use a bird radar system positioned at the edge of Luchterduinen offshore wind farm to measure hourly bird abundance and model the effect of sun position, week in the breeding season, and astronomic tide. We have the following expectations, based on the existing literature (see previous references): (1) offshore bird abundance will be higher during daylight hours than during night, (2) abundance will be higher in the later stages of breeding than at the start of breeding, and (3) abundance will be higher between low and high tide, when the tidal current is strongest and might create foraging opportunities through increased upwelling. The external variables are all highly regular and could be used to better predict offshore bird abundance on the North Sea during the breeding season if found to have a significant impact on bird abundance.
Methods
Radar measurements
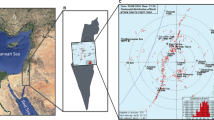
Bird flight was monitored by a bird radar system (RobinRadar 3D Fixed) consisting of a vertically rotating X-band antenna (25Kw, Furuno Marine) and horizontally rotating S-band antenna (60Kw, Furuno Marine) both rotating at 0.75 rotations s−1. The system was mounted on the service platform of turbine 42 (52.427827° N, 4.185345° E) situated at the edge of Luchterduinen, 25 km from the coast near IJmuiden (Fig. 1).

Overview of the sample area and Luchterduinen offshore wind farm (box) and the position of the radar in relation to the coast of the Netherlands (map). Map: tidal water height was measured at Hoorn platform (blue dot, 52.92464° N, 4.15° E), ERA5 data was sampled from the nearest grid cell between 52.375° N–52.625° N and 4.125° E–4.375° E (blue dotted square), and ESAS5.0 species observation data were sampled between 51.8° N–53° N and 3.7° E–4.7° E (dashed black square). Box: black dots show the individual turbines, the red dot shows the turbine that has the radar-system installed (52.42783° N, 4.18535° E). The 1 km2 area of interest is shown in red with black lining; it is delimited by the 1000 and 2000 m ranges and the 22.5° and 60.7° azimuth angles from the radar
The measurements of the radar system were automatically processed to create tracks of birds using proprietary software developed by RobinRadar. The radar software had clutter filters to reduce the probability of non-avian scatters being erroneously tracked as birds. These filters were applied dynamically in each radar image to remove unwanted reflections caused by landscape features, waves or rain, and information on filtering was stored per image. Each track was classified by the software based on its properties: tracks with a maximum average airspeed below 36.1 m s−1 and a signal-to-noise ratio typical for birds (between − 10 and 65) were categorised as birds. Airspeed was calculated by the proprietary software using wind speed and direction measured at the radar (AIRMAR 150WX WeatherStation). In situations where multiple birds flew closely together in a flock, the radar was not able to distinguish and track individual birds. In this case, the group of birds was tracked as a single object and given a tag to indicate the object consists of a flock of birds. It was impossible to find out the number of birds belonging to these flocks, and therefore tracks with a flock tag were treated as single observations in this study. The resulting tracks were stored in a centralized spatial database.
Radar data were collected in the years 2019 and 2020. The relevant period within these years was chosen to match the breeding period of the most abundant species. Based on species observation data taken from the European Seabird at Sea database (ESAS 5.0, accessed 16-02-2021, Camphuysen et al. 2004; Reid and Camphuysen 1998) near the wind farm (51.8° N–53° N, 3.7° E–4.7° E, Fig. 1) in the months of May, June and July, the lesser black-backed gull was found to be the most prevalent species by far in this part of the North Sea (56.8% of observations, see Online Resource 1). This was also confirmed by species observation reports made at the nearby OWEZ wind farm (Krijgsveld et al. 2011) and before the construction of Luchterduinen (Gyimesi et al. 2019) during spring and summer. The lesser black-backed gull was therefore designated as the key species for deciding our period of interest. Based on field observations of egg-laying and fledging at colonies along the North Sea coast (Camphuysen and Gronert 2010; Cottaar et al. 2018, 2020) we selected the period of May 1st to July 15th as the breeding season.
The bird detection probability of the radar is not equal over the whole radar observation window. The reflective size of a bird and thus its detection probability changes with range to the radar and position within the radar beam (Schmid et al. 2019). To account for this, data was selected from an area in which detection probability would be relatively homogeneous based on the properties of the radar and the position of the radar system relative to the wind farm. To account for detection loss occurring because of a decrease in radar beam power with range, the maximum range from the radar was set at 2000 m. Beyond this range, the detection probability for small birds (< 62.5 g) drops below 80% at certain scanning altitudes (Online Resource 2). On the other hand, the high power of the radar beam at close range can produce false-positive bird tracks caused by other features reflecting the radar beam. Therefore, the minimum range for track inclusion was set at 1000 m. Detection rate at different azimuth angles (scanning angle of the horizontal radar) differed because of turbine placement of the wind farm. As the radar itself was installed on the service platform of a wind turbine, the radar beam was blocked by the turbine between 275° and 346° degrees. Additionally, the other turbines in the wind farm were situated roughly between 80° and 260°, creating a zone in which bird detection is impaired around each turbine. To avoid detection bias in these regions, data were sampled from an azimuth angle between 22.5° and 60.7° at 1000 to 2000 m from the radar, resulting in a 1 km2 area of open sea North-East of the radar (Fig. 1). Only tracks which occurred (partially or entirely) within this area were analysed in this study. The radar detects birds reliably up to an altitude of 300 m for small birds (< 62.5 g) and up to an altitude of 600 m for larger birds (500 g, see Online Resource 2). The radar system only measures birds in flight, leaving birds floating on the water unseen. Note that detection probability can also change with the aspect and shape of tracked birds (Bruderer 1997); however, there is no way to account for this in the data as we cannot quantify the aspect of the targets.
Environmental data
Astronomic tide was retrieved from the nearest observation station at Hoorn Platform (52.92064° N, 4.09822° E, approximately 55 km northwest of the study site, Fig. 1) from the Rijkswaterstaat public database (Rijkswaterstaat 2020, accessed 19 October 2020), which contained astronomic tide acquired through harmonic analysis as water height in centimetres above Mean Sea Level (cm—MSL). Tidal information was retrieved at the half-hour mark each hour (xx30 h) to best reflect average tidal height for each hour (xx00–xx59 h).
For data filtering purposes, we extracted wind data to independently calculate air speed of the radar tracks (see Radar data processing). Hourly wind data were acquired from the ECMWF (European Centre for Medium-Range Weather Forecasts) ERA5 reanalysis data (Hersbach et al. 2018; Hersback et al. 2020, accessed 15 September 2020). Wind conditions are described by u- and v-components (both in m s−1), where the u-component is the zonal wind (wind from the west is positive) and the v-component is the meridional wind (wind from south is positive). The u- and v-components have a temporal resolution of 1 h and spatial resolution of 0.25° latitude and longitude, and were sampled from the grid cell closest to the study area (52.375° N–52.625° N and 4.125° E–4.375° E, Fig. 1). Wind components were selected from the lowest atmospheric layer, 10 m above the sea surface, to match both the properties of the radar observations and known flight heights of the relevant bird species: we expected flight altitudes of most species to be close to the sea surface during local movements (Johnston et al. 2014; Corman and Garthe 2014; Ross-Smith et al. 2016; Borkenhagen et al. 2017).
Radar data processing
Each track created by the radar software included at least five track points and several track properties: geolocation plus timestamp (UTC) per track point and track direction based on a vector drawn from the starting point to the end point of the track (radians). Per track, straight line displacement (m) was calculated as the great circle distance between the first and last track point, and the track length (m) was calculated as the sum of the great circle distance between consecutive track points. Ground speed per track was calculated as track length divided by track duration (m s−1). Airspeed per track was calculated using ground speed, track direction and hourly u- and v-wind components nearest to the first timestamp of the track according to Shamoun-Baranes et al. (2007). Track straightness was calculated by dividing the straight line displacement by the track length. Tracks with airspeed < 5 m s−1 were removed as nearly all seabird species fly at higher airspeeds (Spear and Ainley 1997; Alerstam et al. 2007; Shamoun-Baranes et al. 2016). Additionally, manual data exploration indicated static reflections from nearby vessels or structures created stationary, long-lasting, false-positive bird tracks. To identify these clutter tracks, we calculated the displacement over time (m s−1) by dividing straight line displacement by the track duration. Through visual inspection, the tracks falling in the 0.1st percentile of displacement over time (0.08 m s−1) were identified as clutter and removed.
To analyse bird abundance throughout the breeding season, we calculated the total number of tracks occurring in the area of interest per hour (from here on reported as birds h−1). All tracks occurring between xx00 and xx59 h were included in hour xx. Sun position (azimuth angle, extracted using the suncalc package v0.5.0; Thieurmel and Elmarhraoui 2019) and astronomic tide (cm—MSL) were collected at the half-hour mark (xx30 h) to reflect the average conditions within that hour. During the study period, the radar was occasionally not operational and hours in which the radar was (partially) offline were not included in the analysis. Furthermore, during exploratory analysis it became clear that birds were no longer detected by the radar when the clutter filter of the radar was highly active. Therefore, to reduce the chance of analysing artificial lows in bird abundance caused by high filter activity, we removed all hours with an average filter activity above a set threshold of 0.240 (elaboration available in Online Resource 3).
Though we designated a sampling period (May 1st–July 15th) in which we expected to observe predominantly local movements of species that breed in the region, migration might still occur. These events fall outside the scope of this research and could strongly impact measured hourly abundance. Therefore we chose to remove these occurrences. We identified moments of migration in our dataset by looking at the hourly average flight characteristics. We first calculated the mean hourly track direction (radians), the hourly mean of track straightness (0–1), and the circular uniformity of hourly track direction (0–1). This last characteristic was calculated by treating the flight direction of each observation as a unit vector, calculating the resultant vector of all vectors in the hour combined, and dividing the resultant vector by the number of observations using the circular package (v0.4–93; Lund and Agostinelli 2017). We identified migration events as hours of relatively high bird abundance and with relatively high directional uniformity compared to the total data sample, and with straight flight paths on average. The following criteria were used to identify migration hours: hourly abundance > mean of data (114 birds h−1), uniformity of hourly flight direction > 90th percentile of data (0.60), and mean track straightness > median of data (0.78). Within these migration hours, tracks with straightness > 0.78 and a track direction within a 45° window around the hourly mean track direction were removed.
After applying the aforementioned selection criteria, 1879 hourly values of bird abundance remained (based on 208.372 tracks). This data formed the basis for further analysis. In general data availability was slightly higher from 22:00 to 8:00 local time (55.6% of hours available) than between 08:00 and 22:00 (48.5% of hours). Hourly abundance was available for 123 out of 152 observations days, with 29 days that were completely observed (24 observation hours d−1). Over the breeding season of 1824 observation hours per year, 417 h were not covered in either season (overview available in Online Resource 4), in particular, week 2 (May 8th–14th), week 3 (May 15th–22nd), and week 9 (June 26th–July 2nd) missed more than a third of the observation hours (80, 60, and 96 observation hours out of 168 h, respectively). Together with the hours the radar was offline, in total 48.5% of the hours were excluded from the analysis. For a summary of data retained after each selection step and the total number of tracks per season, see Table 1.
Data analysis
To model the effects of the environmental variables on hourly bird abundance and test for the significance of these effects, generalized additive models were fitted to the data using the mgcv package (v1.8–32; Wood 2020). Hourly bird abundance (birds h−1) was used as the dependent variable, with predictors sun azimuth (cyclic P-spline smoother, k = 9 to prevent overfitting), week in the breeding season (thin plate regression spline smoother) and tidal water height (thin plate regression spline smoother), and year as a random effect (model A). Collinearity among predictors was calculated using the Pearson product-moment correlation coefficient to verify no interaction between the predictors existed and they could be added as individual effects. We assumed a quasi-Poisson distribution for the model error, which was verified with the model residuals after fitting the model and did not require any adjustment. As we used abundance data collected over time, we tested for temporal auto-correlation of the model residuals. Model residuals were highly auto-correlated and thus a new model was fit including the previous hourly abundance added as an auto-regressive term (thin plate regression spline smoother, k = 4 to prevent overfitting) to account for temporal auto-correlation (model B). 103 h of data without known previous hourly abundance (due to gaps in the data) were excluded from model B. We checked whether each predictor contributed to the models by creating sub-models with one predictor removed and comparing for lower AIC-scores (Burnham and Anderson 2004). If a sub-model scored better, we would use this model instead of the complete model and tested whether further model-reduction would be warranted by repeating the process. The modelling outputs of both model A and B were explored further for the individual predictor effects, which were approximated by subtracting the explained deviance from the sub-model without the predictor from the deviance explained by the complete model. Due to a large observed decrease in effect size of all environmental predictors with the addition of the auto-regressive term in model B, we sampled and analysed 10.000 random subsamples of the data (n = 300) where all data points were at least 5 h apart and modelled the effect of environmental predictors (same as model A) on these subsamples. We inspected the mean and standard deviation of the model outputs as well as remaining auto-correlation to confirm temporal auto-correlation for these models was highly reduced. All analyses were performed in R version 4.0.0 (R Core Team 2020).
Results
Hourly bird abundance
Hourly bird abundance varied between 0 and 1423 birds h−1 in 2019 (Fig. 2) and 0 and 840 birds h−1 in 2020 (Fig. 3). Mean hourly abundance in 2019 was 99 birds h−1 (95% confidence interval = 93–107 birds h−1) and 129 birds h−1 (95% confidence interval = 119–136 birds h−1) in 2020.

Overview of hourly bird abundance in 2019 (in dark red) per month, with kernel density distribution of the data (bottom-right corner). Grey columns show hours in which filter activity was too high for accurate recordings, while black columns show hours the radar was offline. The Y-axis of all figures is limited to 800 birds h−1 for better interpretation; one outlier (2019-06-14 1600, 1423 birds) is therefore capped to 800 birds. The horizontal black lines in the density distribution graph show the mean (black line) and 90th percentile (dashed black line) of the distribution

Overview of hourly bird abundance in 2020 (in dark blue) per month, with kernel density distribution of the data (bottom-right corner). Grey columns show hours in which filter activity was too high for accurate recordings, while black columns show hours the radar was offline. The Y-axis of all figures is limited to 800 birds h−1 for better interpretation; two outliers (2020-06-10 0500, 810 birds; 2020-06-20 0900, 840 birds) are therefore capped to 800 birds. The horizontal black lines in the density distribution graph show the mean (black line) and 90th percentile (dashed black line) of the distribution
Effect of external variables
Collinearity among environmental predictors was low (Pearson product-moment correlation coefficients: sun azimuth and week in the breeding season = 0.028, sun azimuth and tidal water height = 0.075, week of the breeding season and tidal water height = 0.002) and no interactions were assumed. Model A showed a high amount of temporal auto-correlation in the residuals, which was removed in model B. For both model A and B the full model scored the best (lowest AIC score). Model A is described further in Online Resource 5. Model B is described further below (Table 2), with a focus on the environmental predictor effects that were significant. Bird abundance was significantly related to sun azimuth (p < 0.001) and week of the breeding season (p < 0.001), but not to astronomic tide (p = 0.576). The complete model explained 52.1% of data deviance (R2 = 0.48). Of the three environmental predictors, sun azimuth had the strongest estimated effect on hourly bird abundance (1.1% of deviance), followed by week of the breeding season (0.7%), and tide (< 0.1%, non-significant). Year as a random effect was not significant and accounted only for 0.9% of deviance. Previous hourly abundance to account for temporal auto-correlation was highly significant, with an estimated effect of 33.8% of deviance. The effect size estimate and confidence intervals (2*standard error) of the significant environmental predictor effects are visualized in Fig. 4. The effect of sun azimuth (Fig. 4A) showed two peaks in predicted number of birds h−1 during the day, one in the morning after sunrise (129 birds h−1) and a second, smaller peak in the afternoon (115 birds h−1) and lowest predicted abundance after sunset (93 birds h−1). The effect of week of the breeding season (Fig. 4B) showed a slight increase in mean predicted bird abundance from the last weeks of May to late June (week of June 19th), rising from 85 birds h−1 to 108 birds h−1. After this peak hourly abundance dropped to a mean predicted 100 birds h−1 in the last week of July.

Smoothed effects of the significant individual predictors in the hourly abundance model B (n = 1776). Left Y-axis shows hourly bird count (black dots/boxplots), whereas the right Y-axis shows predicted hourly bird count (purple line = mean, area = mean ± 2·se). a Effect of sun azimuth, in radians from South (X-axis). Sunrise occurs between Azimuth = -0.73π and -0.64π, sunset between Azimuth = 0.64π and 0.73π, indicated by the grey areas. b Effect of week in the breeding season, date indicates the first day of each week (X-axis)
The range of generalized additive model output for the sub-sample models is depicted in Table 3. The sub-sample models explained (22.0 ± 3.7%) of deviance in the data (R2 = 0.18 ± 0.04), while temporal auto-correlation was strongly reduced (ACF = 0 for time lag 1–4 h, ACF = 0.14 ± 0.10 for time lag = 5 h). The distribution of the size and significance per individual effect for the environmental predictors was similar to model A (Online Resource 5).
Discussion
In this study, we show that hourly bird abundance near an offshore wind farm can strongly fluctuate and a portion of variance is explained by daylight availability (operationalized by sun azimuth) and time of the year (operationalized by week in breeding season), but not by astronomic tide. The results support our expectation that observed patterns of offshore bird abundance reflect both diurnal and seasonal processes throughout the breeding season, though most variability could not be explained by the temporally predictable environmental variables explored.
We expect the most abundant species near Luchterduinen are central place foragers (namely lesser black-backed gull, herring gull, and great cormorant (Phalacrocorax carbo), Online Resource 1) and our results support our expectation that these birds mainly undertake their foraging bouts after sunrise when daylight can aid them in their foraging. The drop in bird abundance throughout the day might indicate some birds return to their colony earlier than others. Indeed offshore foraging trip duration of several seabird species common in the breeding season varies greatly: lesser black-backed gull 8.0 ± 6.3 h (Garthe et al. 2016) and 8.3 ± 10.2 h/6.9 ± 11.9 h (long trips for males/females, Camphuysen et al. 2015), Sandwich tern 2.3 ± 1.1 h (Fijn et al. 2017). If most birds fly out from their colony around sunrise to undertake foraging bouts of several hours at sea, a decrease in their abundance throughout the day would be expected. The second peak in abundance before sunset might be caused by an increase in the flux of birds returning to the coast from farther at sea, or by birds also foraging in the evening which is supported by Schwemmer and Garthe (2005) who found a higher proportion of foraging lesser black-backed gull over the North Sea both in the morning and evening hours. Though we considered the breeding birds on the Dutch coast to be diurnal, with peaks in offshore activity during the day, there was activity recorded during the night as well. Several gull species such as the lesser black-backed gull and herring gull are known to be out at sea during the night (Camphuysen et al. 2015) and forage on fishery discards during the night (Garthe and Hüppop 1996; Garthe et al. 2016). We note that these studies are species specific, whereas our results depict a general trend in bird abundance, reflecting a combined activity pattern for all species observed in the study area.
In some species breeding stage can affect foraging behaviour (e.g. Sandwich tern (Fijn et al. 2017), and lesser black-backed gulls (Thaxter et al. 2015)). However, whether these changes affect the overall distribution of birds offshore has not been confirmed by observations and remained unclear. Our results show that after a period of relatively low hourly abundance in May, offshore bird abundance increases from the end of May to the end of June (Fig. 4B, Online Resource 5). This aligns with our expectations that offshore bird abundance increases throughout the breeding season, based on the assumption that coastal seabirds breeding in the region shift to a more marine diet during the chick-rearing period (Spaans 1971; Annett and Pierotti 1989), which for lesser black-backed gulls begins around the end of May (Camphuysen and Gronert 2010; Cottaar et al. 2018, 2020). We expected offshore bird abundance to increase further throughout July, yet we observed a decrease in abundance from the end of June (Fig. 4B). The decrease sets in before we would expect to see an effect from the first fledglings in nearby colonies, which starts in the second week of July (Camphuysen and Gronert 2010). It is possible there is a decrease in foraging effort within colonies as more breeding pairs experience breeding failure. In the lesser black-backed gull colony on Texel on average 70.3% of eggs hatch per season while only 23.7% of the hatchlings fledge (Camphuysen and Gronert, 2010, updated to 2020 (unpublished data, Online Resource 1)), and failed breeders might spend less time foraging due to a decrease in energy demands. An alternative explanation for the seasonal patterns observed in this study may be a seasonal fluctuation in offshore food availability. Herring gulls and lesser black-backed gulls in the region forage on fishery discards during the breeding season (Camphuysen 1995; Tyson et al. 2015; van Donk et al. 2017) and temporal and spatial fluctuations in fishery activity may influence bird abundance at sea. In lesser black-backed gulls on a colony in Texel, foraging trips differ between the period of incubation of the eggs and chick rearing (Camphuysen et al. 2015): foraging trip duration decreased during chick rearing compared to egg incubation, while the trip range increased as well as the proportion of time spent at sea. The start of the increase in abundance modelled in this study roughly aligns with the median hatching date of lesser black-backed gulls recorded on Texel (Camphuysen and Gronert 2010; Camphuysen et al. 2015) and might be caused by this shift in behaviour.
Opposed to our expectation, we found no effect on the tide on offshore bird abundance. We expected bird abundance to be highest between low and high tide when the tidal current might cause increased turbulent mixing in the wake of the wind park (Schultze et al. 2020) and provide temporary foraging opportunities. Our results indicate that if this effect is present, it did not affect foraging opportunities enough to significantly affect bird abundance, nor was there any other effect of tidal water height found. For this study we used astronomic tide measured 55 km from the study site (Fig. 1) which was the closest offshore location for which this information was available. Given the dynamic tidal current patterns in the North Sea (Sündermann and Pohlmann 2011), this information will not represent the situation at the study site perfectly. Local tidal information was not available for this study, so there is room for improvement in investigating the relation between the tide and bird abundance offshore.
When working with count data in ecology, temporal auto-correlation is a common phenomenon when sampling counts at a high temporal resolution and was also found in our initial model (model A). Accounting for temporal auto-correlation in the residuals is generally considered preferable, as otherwise the model effects might be inflated. In model B, the auto-regressive term (previous hourly bird abundance) had the greatest effect in predicting hourly abundance by far, at an estimated 32.5% of deviance explained. Though this model was successful in removing temporal auto-correlation in the residuals, we believe the addition of this auto-regressive term in the model may have deflated the effect of our environmental predictors (Table 2) which were much lower than in model A (Online Resource 5). As we investigate temporally varying predictor variables (which are themselves auto-correlated beyond the hourly scale), disentangling the relation between these and the autoregressive term is not straightforward. Temporal auto-correlation can also be negated by sub-sampling the data so that temporal auto-correlation decreases severely, however this decreases data availability for the model, and therefore the output becomes less reliable. By re-sampling the data many times and investigating the range of the model outputs, we believe we can still get close to the actual relationship between hourly abundance and the environmental predictors, while accounting for temporal auto-correlation. The outcome (Table 3) shows that both sun azimuth and week of the breeding season have clear significant effects and tide does not, and the effect size is close to the original model (model A, Online Resource 5). Therefore, we expect the actual size of the effect of the predictors on bird abundance will probably lie closer to model A presented in Online Resource 5 than model B (Table 2; Fig. 4). Note that though the size of the effects of model A and B differs, the pattern of the effects is very similar, and we believe these to be accurate for both significant predictors.
The bird observations used in this study were captured by a radar system installed near the Dutch West coast. Compared to the size of the North Sea, the sampling area for the dataset was small (Fig. 1), and thus our findings may also be limited to a specific area on the North Sea. The foraging range of coastal seabirds can differ between (Thaxter et al. 2012) and within species (Redfern and Bevan 2014), and spatial preference can even differ per year within the same colony, as seen in Sandwich terns (Fijn et al. 2017). Therefore, temporal patterns in bird abundance offshore may differ spatially in relation to distance to nearby breeding colonies, the foraging strategies prevalent within those colonies, and per year. The difference in the average seasonal abundance between the years 2019 and 2020 was large (103 birds h−1 in 2019 and 134 birds h−1 in 2020), and the effect of year as a random effect in the model was significant in model A (Online Resource 5), but not in model B, which had an auto-regressive term to account for temporal auto-correlation (Table 2). The significance had a wide spread in the models of the sub-samples (0.265 ± 0.248, Table 3) indicating a high level of uncertainty on the impact of this factor. Additionally, gaps in the data can cause increased uncertainty in the models if data is unavailable for one or both years. To separate yearly variability from repeating seasonal patterns and cover the full study period despite the gapped data, multiple years of continuous monitoring are required to illuminate underlying patterns and mechanisms in bird distribution offshore. This shows long-term monitoring is vital to understanding the variability in bird abundance offshore, as has been noted before for tracking studies (Thaxter et al. 2015). Additionally, the question remains whether the findings in this study reflect patterns and processes in other parts of the North Sea. The inclusion of abundance data from different regions of the North Sea might reveal spatial components affecting the temporal patterns of birds offshore and further reveal the underlying processes that lead to observed patterns. For example, central foragers have a foraging range around their colony (Camphuysen et al. 2015; Garthe et al. 2016), and we suspect the daily observed abundance will differ with distance to shore and/or distance to nearest seabird colonies. Ideally, these data should cover long periods of time as well, and bird radars could fulfil a role here to acquire year-round abundance patterns in multiple locations. Finally, the integration of the measured abundance from bird radar with the intricate biological information which can be gained from bio-logging data would strengthen our capacity to understand the underlying processes influencing bird flight behaviour and distributions offshore (Bauer et al. 2019), also in relation to solving potential conflicts including wind energy and aviation safety (Shamoun-Baranes et al. 2018), and merits future exploration.
The radar used in this study dynamically applies a filter over its observed area to prevent clutter (caused by, e.g. rainfall or high waves) from contaminating bird measurements, and therefore, birds flying in range of the radar might be filtered out during periods of high filter activity. In our study period, 33% of all hours could not be studied because filtering activity was estimated to be too high to yield accurate results (Table 1, additional elaboration in Online Resource 3). In general, these filters become increasingly active as sea state increases or precipitation occurs; thus, our results do not reflect bird abundance when sea state is high and during precipitation. Even when filter activity is low, some birds could still be filtered out by the radar software and cause an underestimation of observed bird abundance. Improvements in post-processing of the radar data could allow us to include data from a wider array of circumstances; including a larger sampling area and sampling during high filter activity.
Understanding temporal variation in bird abundance at sea can have important implications for wildlife management and estimating the impact of anthropogenic development in an area such as wind farm development, and can improve species distribution estimations at sea. On the DCS the Dutch government plans to produce 11.5GW of offshore wind energy by the end of 2030 (Rijksoverheid 2019) and the cumulative effect of this development on offshore birdlife is difficult to predict. A commonly used method to analyse the impact of wind farms is to determine collision risk through modelling (Masden and Cook 2016). These models incorporate turbine measurements, weather conditions, bird morphometrics, flight speed and altitude, and bird abundance estimations to calculate collision risk for a specific wind farm. The specific methods these models employ can differ, but the majority assumes a linear relationship between bird abundance and collision risk. Our data show bird abundance can fluctuate greatly on both an hourly and seasonal scale, and both spatial planning and impact assessments should address temporal variation in bird occurrence. Long-term monitoring to provide wide temporal coverage is therefore needed to understand the range and causes of these fluctuations in bird abundance, which can improve the temporal accuracy of collision risk models to better inform policymakers. For example, predictions of collision risk can be used to initiate temporary shutdown of turbine during periods of high collision risk and with better temporal bird abundance estimations wind farm uptime can be maximized without endangering large numbers of birds.
This study shows that two of the three predictable external variables evaluated in this study, sun azimuth and week, affect bird abundance on the North Sea during the breeding season. The third variable, astronomic tide, appears to have no effect. The diurnal pattern in bird abundance shows a distinctive peak in the morning another lower peak later in the afternoon before sunset while it is constantly low during night. The pattern over the breeding season shows an increasing trend until the end of June, after which bird abundance decreases. Most of the observed variance in hourly bird abundance could not be explained by our investigated environmental variables, and thus other factors have to be considered such as indicators of resource availability or weather conditions. Due to its capability to monitor bird movements in an area for extended periods of time, bird radar monitoring can allow us to discover general patterns in bird movement and, when accounting for its limits, bird radar can continue to play a role in improving our knowledge of the spatial and temporal distribution of birds offshore.
References
Alerstam T, Rosén M, Bäckman J, Ericson PGP, Hellgren O (2007) Flight speeds among bird species: allometric and phylogenetic effects. PLoS Biol 5:e197. https://doi.org/10.1371/journal.pbio.0050197
Annett C, Pierotti R (1989) Chick hatching as a trigger for dietary switching in the western gull. Colon Waterbirds 12:4–11. https://doi.org/10.2307/1521306
Bauer S, Shamoun-Baranes J, Nilsson C, Farnsworth A, Kelly JF, Reynolds DR, Dokter AM, Krauel JF, Petterson LB, Horton KG, Chapman JW (2019) The grand challenges of migration ecology that radar aeroecology can help answer. Ecography 42:861–875. https://doi.org/10.1111/ecog.04083
Borkenhagen K, Corman A-M, Garthe S (2017) Estimating flight heights of seabirds using optical rangefinders and GPS data loggers: a methodological comparison. Mar Biol 165:17. https://doi.org/10.1007/s00227-017-3273-z
Bruderer B (1997) The study of bird migration by radar part 1: the technical basis. Naturwissenschaften 84:1–8. https://doi.org/10.1007/s001140050338
Burnham KP, Anderson DR (2004) Multimodel inference: understanding AIC and BIC in model selection. Sociol Methods Res 33:261–304. https://doi.org/10.1177/0049124104268644
Camphuysen CJ (1995) Herring Gull Larus argentatus and Lesser Black-backed Gull L.fuscus feeding at fishing vessels in the breeding season: competitive scavenging versus efficient flying. Ardea 83:365–380
Camphuysen C, Dijk J (1983) Zee- en kustvogels langs de Nederlandse kust, 1974–79. Limosa 56:81–230
Camphuysen CJ, Gronert A (2010) De broedbiologie van Zilver- en Kleine Mantelmeeuwen op Texel, 2006–2010. Limosa 83:145–159
Camphuysen CJ, Leopold MF (1994) Atlas of seabirds in the southern North Sea. Netherlands Institute for Sea Research, The Netherlands
Camphuysen CJ, Fox AD, Leopold MF, Petersen IK (2004) Towards standardised seabirds at sea census techniques in connection with environmental impact assessments for offshore wind farms in the UK. Report commissioned by CORWRIE. Texel, The Netherlands: Royal Netherlands Institute for Sea Research. https://doi.org/10.13140/RG.2.1.2230.0244
Camphuysen CJ, Shamoun-Baranes J, van Loon EE, Bouten W (2015) Sexually distinct foraging strategies in an omnivorous seabird. Mar Biol 162:1417–1428. https://doi.org/10.1007/s00227-015-2678-9
Corman A-M, Garthe S (2014) What flight heights tell us about foraging and potential conflicts with wind farms: a case study in Lesser Black-backed Gulls (Larus fuscus). J Ornithol 155:1037–1043. https://doi.org/10.1007/s10336-014-1094-0
Cottaar F, Verbeek-Cottaar J, van Kleinwee M (2018) Onderzoek aan Kleine Mantelmeeuw, Zilvermeeuw en Scholekster op het Forteiland IJmuiden in 2018. Haarlem, The Netherlands. https://vogeltrekstation.nl/sites/vt/files/Forteiland%2C%20IJmuiden%202018.pdf. Accessed 18 Aug 2020
Cottaar F, Verbeek-Cottaar J, van Kleinwee M (2020) Onderzoek aan Kleine Mantelmeeuw, Zilvermeeuw en Scholekster op het Forteiland IJmuiden in 2019. Haarlem, The Netherlands. https://kustfort.nl/wp-content/uploads/2020/02/forteiland-2019.pdf. Accessed 18 Aug 2020
Desholm M, Kahlert J (2005) Avian collision risk at an offshore wind farm. Biol Lett 1:296–298. https://doi.org/10.1098/rsbl.2005.0336
Dierschke V, Furness RW, Garthe S (2016) Seabirds and offshore wind farms in European waters: avoidance and attraction. Biol Cons 202:59–68. https://doi.org/10.1016/j.biocon.2016.08.016
Drewitt AL, Langston RHW (2006) Assessing the impacts of wind farms on birds. Ibis 148:29–42. https://doi.org/10.1111/j.1474-919X.2006.00516.x
Fijn RC, Krijgsveld KL, Poot MJM, Dirksen S (2015) Bird movements at rotor heights measured continuously with vertical radar at a Dutch offshore wind farm. Ibis 157:558–566. https://doi.org/10.1111/ibi.12259
Fijn RC, de Jong J, Courtens W, Verstraete H, Stienen EWM, Poot MJM (2017) GPS-tracking and colony observations reveal variation in offshore habitat use and foraging ecology of breeding Sandwich Terns. J Sea Res 127:203–211. https://doi.org/10.1016/j.seares.2016.11.005
Fijn RC, Arts FA, de Jong JW, Beuker D, Bravo Rebolledo EL, Engels BWR, Hoekstein MSJ, Jonkvorst R-J, Lilipaly S, Sluijter M, van Straalen KD, Wolf PA (2018) Verspreiding en abundantie van zeevogels en zeezoogdieren op het Nederlands Continentaal Plat 2017–2018. Bureau Waardenburg & Delta Project Management, Culemborg. https://puc.overheid.nl/rijkswaterstaat/doc/PUC_154358_31/. Accessed 02 Oct 2020
Fryxell JM, Lundberg P (1998) Individual behavior and community dynamics. Chapman & Hall, London
Garthe S, Hüppop O (1996) Nocturnal scavenging by gulls in the Southern North Sea. Colon Waterbirds 19:232–241. https://doi.org/10.2307/1521861
Garthe S, Schwemmer P, Paiva VH, Corman A-M, Fock HO, Voigt CC, Adler S (2016) Terrestrial and marine foraging strategies of an opportunistic seabird species breeding in the Wadden Sea. PLoS ONE 11:e0159630. https://doi.org/10.1371/journal.pone.0159630
Garthe S, Markones N, Corman A-M (2017) Possible impacts of offshore wind farms on seabirds: a pilot study in Northern Gannets in the southern North Sea. J Ornithol 158:345–349. https://doi.org/10.1007/s10336-016-1402-y
Gyimesi A, Dorenbosch M, de Jong JW, Boonman M, Teunis M, Fijn RC (2019) Achtergronddocument ten behoeve van MER en PB windenergiegebied Hollandse Kust A (Zuid). Bureau Waardenburg, Culemborg. https://commissiemer.nl/projectdocumenten/00004267.pd.f Accessed 19 Oct 2020
Halpin PN, Read AJ, Fujioka E, Best BD, Donnelly B, Hazen LJ, Kot C, Urian K, LaBrecque E, Dimatteo A, Cleary J, Good C, Crowder LB, Hyrenbach KD (2009) OBIS-SEAMAP: the World data center for marine mammal, sea bird, and sea turtle distributions. Oceanography 22:104–115. https://doi.org/10.5670/oceanog.2009.42
Hersbach H, Bell B, Berrisford P, Biavati G, Horányi A, Muñoz Sabater J, Nicolas J, Peubey C, Radu R, Rozum I, Schepers D, Simmons A, Soci C, Dee D, Thépaut J-N (2018) ERA5 hourly data on single levels from 1979 to present. Copernicus climate change service (C3S) Climate Data Store (CDS). Accessed on 15 Sept 2020. https://doi.org/10.24381/cds.adbb2d47
Hersbach H, Bell B, Berrisford P, Hirahara S, Horányi A, Muñoz-Sabater J, Nicolas J, Peubey C, Radu R, Schepers D, Simmons A, Soci C, Abdalla S, Abellan X, Balsamo G, Bechtold P, Biavati G, Bidlot J, Bonavita M, Chiara G, Dahlgren P, Dee D, Diamantakis M, Dragani R, Flemming J, Forbes R, Fuentes M, Geer A, Haimberger L, Healy S, Hogan RJ, Hólm E, Janisková M, Keeley S, Laloyaux P, Lopez P, Lupu C, Radnoti G, Rosnay P, Rozum I, Vamborg F, Villaume S, Thépaut J (2020) The ERA5 global reanalysis. QJR Meteorol Soc 146:1999–2049. https://doi.org/10.1002/qj.3803
Hüppop O, Dierschke J, Exo K-M, Fredrich E, Hill R (2006) Bird migration studies and potential collision risk with offshore wind turbines. Ibis 148:90–109. https://doi.org/10.1111/j.1474-919X.2006.00536.x
Johnston A, Cook ASCP, Wright LJ, Humphreys EM, Burton NHK (2014) Modelling flight heights of marine birds to more accurately assess collision risk with offshore wind turbines. J Appl Ecol 51:31–41. https://doi.org/10.1111/1365-2664.12191
Krijgsveld KL, Fijn RC, Japink M, van Horssen PW, Heunks C, Collier MP, Poot MJM, Beuker D, Dirksen S (2011) Effect studies Offshore Wind Farm Egmond aan Zee. Bureau Waardenburg. https://tethys.pnnl.gov/publications/effect-studies-offshore-wind-farm-egmond-aan-zee-final-report-fluxes-flight-altitudes. Accessed 19 Oct 2020
Lack D (1959) Migration across the north sea studied by radar part 1. Survey through the year. Ibis 101:209–234. https://doi.org/10.1111/j.1474-919X.1959.tb02376.x
Lindeboom HJ, Kouwenhoven HJ, Bergman MJN, Bouma S, Brasseur S, Daan R, Fijn RC, de Haan D, Dirksen S, van Hal R, Hille Ris Lambers R, ter Hofstede R, Krijgsveld KL, Leopold M, Scheidat M (2011) Short-term ecological effects of an offshore wind farm in the Dutch coastal zone; a compilation. Environ Res Lett 6:035101. https://doi.org/10.1088/1748-9326/6/3/035101
Lund U, Agostinelli C (2017) Circular: circular statistics. Version 0.4–93. https://cran.r-project.org/web/packages/circular/index.html
Masden EA, Cook ASCP (2016) Avian collision risk models for wind energy impact assessments. Environ Impact Assess Rev 56:43–49. https://doi.org/10.1016/j.eiar.2015.09.001
Plonczkier P, Simms IC (2012) Radar monitoring of migrating pink-footed geese: behavioural responses to offshore wind farm development. J Appl Ecol 49:1187–1194. https://doi.org/10.1111/j.1365-2664.2012.02181.x
R Core Team (2020) R: A language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Austria
Redfern CPF, Bevan RM (2014) A comparison of foraging behaviour in the North Sea by Black-legged Kittiwakes Rissa tridactyla from an inland and a maritime colony. Bird Study 61:17–28. https://doi.org/10.1080/00063657.2013.874977
Reid J, Camphuysen CJ (1998) The Eurpean seabirds at sea database. In: Spina S, Grattarola A. (eds) Proceedings of the 1st meeting of the European Orn Union Biol Cons Fauna 102:291
Rijksoverheid (2015) Nationaal Waterplan 2016–2021. Dutch Ministry of economic affairs, The Hague. https://www.rijksoverheid.nl/documenten/beleidsnota-s/2015/12/14/nationaal-waterplan-2016-2021. Accessed 09 Feb 2021
Rijksoverheid (2019) Klimaatakkoord. Rijksoverheid, The Hague. https://www.rijksoverheid.nl/onderwerpen/klimaatverandering/documenten/rapporten/2019/06/28/klimaatakkoord. Accessed 01 Oct 2020
Rijkswaterstaat (2020) Rijkswaterstaat Waterinfo. In: Rijkswaterstaat Waterinfo. https://waterinfo.rws.nl/#!/nav/expert/. Accessed 19 Oct 2020
Ross-Smith VH, Thaxter CB, Masden EA, Shamoun-Baranes J, Burton NHK, Wright LJ, Rehfisch MM, Johnston A (2016) Modelling flight heights of lesser black-backed gulls and great skuas from GPS: a Bayesian approach. J Appl Ecol 53:1676–1685. https://doi.org/10.1111/1365-2664.12760
Schmid B, Zaugg S, Votier SC, Chapman JW, Boos M, Liechti F (2019) Size matters in quantitative radar monitoring of animal migration: estimating monitored volume from wingbeat frequency. Ecography 42:931–941. https://doi.org/10.1111/ecog.04025
Schultze LKP, Merckelbach LM, Horstmann J, Raasch S, Carpenter JR (2020) Increased mixing and turbulence in the wake of offshore wind farm foundations. J Geophys Res Oceans 125:e2019JC015858. https://doi.org/10.1029/2019JC015858
Schwemmer P, Garthe S (2005) At-sea distribution and behaviour of a surface-feeding seabird, the lesser black-backed gull Larus fuscus, and its association with different prey. Mar Ecol Prog Ser 285:245–258. https://doi.org/10.3354/meps285245
Shamoun-Baranes J, van Loon EE, Liechti F, Bouten W (2007) Analyzing the effect of wind on flight: pitfalls and solutions. J Exp Biol 210:82–90. https://doi.org/10.1242/jeb.02612
Shamoun-Baranes J, Bouten W, van Loon EE, Meijer C, Camphuysen CJ (2016) Flap or soar? How a flight generalist responds to its aerial environment. Philos Trans R Soc Lond B Biol Sci 371:20150395. https://doi.org/10.1098/rstb.2015.0395
Shamoun-Baranes J, van Gasteren H, Ross-Smith V (2018) Sharing the aerosphere: conflicts and potential solutions. In: Chilson P, Frick W, Kelly J, Liechti F (eds) Aeroecology. Springer, Cham, pp 465–497
Shealer DA (2002) Foraging behavior and food of seabirds. In: Schreiber EA, Burger J (eds) Biology of marine birds. CRC Press, Boca Raton, pp 137–178
Spaans AL (1971) On the feeding ecology of the Herring Gull Larus argentatus Pont. in the northern part of the Netherlands. Ardea 55:73–188. https://doi.org/10.5253/arde.v59.p73
Spear LB, Ainley DG (1997) Flight speed of seabirds in relation to wind speed and direction. Ibis 139:234–251. https://doi.org/10.1111/j.1474-919X.1997.tb04621.x
Sündermann J, Pohlmann T (2011) A brief analysis of North Sea physics. Oceanologia 53:663–689. https://doi.org/10.5697/oc.53-3.663
Thaxter CB, Lascelles B, Sugar K, Cook ASCP, Roos S, Bolton M, Langston RHW, Burton NHK (2012) Seabird foraging ranges as a preliminary tool for identifying candidate Marine Protected Areas. Biol Cons 156:53–61. https://doi.org/10.1016/j.biocon.2011.12.009
Thaxter CB, Ross-Smith VH, Bouten W, Clark NA, Conway GJ, Rehfisch MM, Burton NHK (2015) Seabird–wind farm interactions during the breeding season vary within and between years: A case study of lesser black-backed gull Larus fuscus in the UK. Biol Cons 186:347–358. https://doi.org/10.1016/j.biocon.2015.03.027
Thaxter CB, Ross-Smith VH, Bouten W, Masden EA, Clark NA, Conway GJ, Barber L, Clewley GD, Burton NHK (2018) Dodging the blades: new insights into three-dimensional space use of offshore wind farms by lesser black-backed gulls Larus fuscus. Mar Ecol Prog Ser 587:247–253. https://doi.org/10.3354/meps12415
Thieurmel B, Elmarhraoui A (2019) Suncalc: compute sun position, sunlight phases, moon position and lunar phase. Version 0.5.0. https://cran.r-project.org/web/packages/suncalc/index.html
Tyson C, Shamoun-Baranes J, van Loon EE, Camphuysen CJ, Hintzen NT (2015) Individual specialization on fishery discards by lesser black-backed gulls (Larus fuscus). ICES J Mar Sci 72:1882–1891. https://doi.org/10.1093/icesjms/fsv021
Urmy S, Warren J (2018) Foraging hotspots of common and roseate terns: the influence of tidal currents, bathymetry, and prey density. Mar Ecol Prog Ser 590:227–245. https://doi.org/10.3354/meps12451
van Donk S, Camphuysen CJ, Shamoun-Baranes J, van der Meer J (2017) The most common diet results in low reproduction in a generalist seabird. Ecol Evol 7:4620–4629. https://doi.org/10.1002/ece3.3018
Vanermen N, Courtens W, Daelemans R, Lens L, Müller W, van de Walle M, Verstraete H, Stienen EWM (2019) Attracted to the outside: a meso-scale response pattern of lesser black-backed gulls at an offshore wind farm revealed by GPS telemetry. ICES J Mar Sci 77:701–710. https://doi.org/10.1093/icesjms/fsz199
Wetterer JK (1989) Central place foraging theory: when load size affects travel time. Theor Popul Biol 36:267–280. https://doi.org/10.1016/0040-5809(89)90034-8
Wood S (2020) Mixed GAM computation vehicle with automatic smoothness estimation. Version 1.8–33. https://cran.r-project.org/web/packages/mgcv/index.html
Acknowledgements
We thank Rijkswaterstaat (Zee and Delta and Centrale Informatievoorziening) for providing the radar data and RobinRadar for providing details on the radar system. We thank Bureau Waardenburg for sharing their expertise with bird radar and observational data on birds flying in the wind farm. This work was carried out on the Dutch national e-infrastructure with the support of SURF Cooperative. The ESAS 5.0 database was queried as a database contributor (C.J. Camphuysen). We also thank Maja Braderić for the extensive and fruitful discussion on working with bird radar data and Johannes de Groeve for his support on data querying. We thank the anonymous reviewers for the constructive feedback on the manuscript.
Funding
This study is part of the Open Technology Programme, project Interactions between birds and offshore wind farms: drivers, consequences and tools for mitigation (project number 17083), which is financed by the Dutch Research Council (NWO) Domain Applied and Engineering Sciences, in collaboration with the following public and private partners: Rijkswaterstaat and Gemini wind park.
Author information
Authors and Affiliations
Contributions
The study was conceived and designed by JAvE, JSB and EEvL. Data collection was performed by JAvE and CJC provided the ESAS data. Data preparation and processing were performed by JAvE. Statistical analysis was performed by JAvE and EEvL. The first draft of the manuscript was written by JAvE, and all authors contributed to subsequent versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Data availability
Bird radar tracks with the external variables that were used in the data analysis and support the findings of this study are available in the figshare repository https://doi.org/10.21942/uva.14261609. ESAS5.0 species distribution counts used in this study are available in the supplementary information (Online Resource 1).
Code availability
The code used in the data processing and analysis is available in the figshare repository https://doi.org/10.21942/uva.14261609.
Ethical approval
Ethical approval was not applicable to this study as no animal test subjects were involved in this study.
Informed consent
Informed consent for participation was not applicable to this study as no human test subjects were involved.
Additional information
Responsible Editor: V. Paiva.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Reviewers: undisclosed experts.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
van Erp, J.A., van Loon, E.E., Camphuysen, K.J. et al. Temporal patterns in offshore bird abundance during the breeding season at the Dutch North Sea coast. Mar Biol 168, 150 (2021). https://doi.org/10.1007/s00227-021-03954-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00227-021-03954-4