
Abstract
The Whitham equation is a nonlocal shallow water-wave model which combines the quadratic nonlinearity of the KdV equation with the linear dispersion of the full water wave problem. Whitham conjectured the existence of a highest, cusped, traveling-wave solution, and his conjecture was recently verified in the periodic case by Ehrnström and Wahlén. In the present paper we prove it for solitary waves. Like in the periodic case, the proof is based on global bifurcation theory but with several new challenges. In particular, the small-amplitude limit is singular and cannot be handled using regular bifurcation theory. Instead we use an approach based on a nonlocal version of the center manifold theorem. In the large-amplitude theory a new challenge is a possible loss of compactness, which we rule out using qualitative properties of the equation. The highest wave is found as a limit point of the global bifurcation curve.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In this paper, we continue the story of singular wave phenomena featured in the Whitham equation. The equation was proposed by Whitham [33], in an attempt to remedy the failure of the KdV equation in capturing wave breaking and peaking. He proposed that the linear dispersion in the KdV equation with Fourier symbol \(1 - \frac{1}{6}\xi ^2\) should be replaced by the exact linear dispersion in the Euler equation with Fourier symbol
Note that the dispersion in the KdV equation is the second-order approximation of m at \(\xi =0\). This leads to the nonlinear nonlocal evolution equation
known as the Whitham equation. Here, u(x, t) describes the one-dimensional wave profile and the integral kernel K is given by
The function K will be referred to as the Whitham kernel, and the function m as the Whitham symbol. Specializing to traveling waves \(u = \varphi (x-ct)\) where \(c>0\) is the wave speed, integrating and performing a Galilean change of variables, the Whitham equation reduces to the nonlinear integral equation
We are interested in functions \(\varphi :{\mathbb {R}}\rightarrow {\mathbb {R}}\) which satisfy (1) pointwise on \({\mathbb {R}}\), and which we refer to as solutions of (1) with wave speed c. More specifically, the results of this paper will concern solitary solutions, also called solitary-wave solutions. These are solutions \(\varphi :{\mathbb {R}}\rightarrow {\mathbb {R}}\) satisfying \(\lim _{|x|\rightarrow \infty } \varphi (x) = 0\).
Despite its simple form, the nonlocal and nonlinear nature of the Whitham equation has made it challenging to study. Recent years have seen a large amount of existence and qualitative results on the solutions of the equation. Traveling small-amplitude periodic solutions were found by Ehrnström and Kalisch [21] using the Crandall–Rabinowitz bifurcation theorem. Then, Ehrnström et al. [19] proved the existence of solitary waves using a variational method for a class of Whitham-type equations. This was followed up by Arnesen [4] where a class covering the Whitham equation with surface tension was considered. By applying a different technique—the implicit function theorem—Stefanov and Wright [31] achieved the same result. Ehrnström and Wahlén [22] showed the existence of a traveling cusped periodic wave \(\varphi \) using global bifurcation theory, and proved that \(\frac{c}{2}-\varphi (x) \sim |x|^{1/2}\) near the origin. This wave attains the highest amplitude possible and is referred to as an extreme wave solution. They also conjectured that \(\varphi \) is convex and \(\varphi = \frac{c}{2}-\sqrt{\pi /8}|x|^{1/2} + o(x)\) as \(x \rightarrow 0\). Convexity of the extreme wave was shown by Encisco et al. [23] using a computer assisted proof.

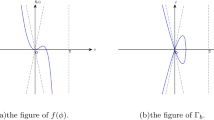
An extreme solitary-wave solution found by taking a limit of elements along the global bifurcation curve in Theorem 4.8. The wave speed c is supercritical, that is, \(c>1\). The wave profile \(\varphi \) is even and smooth on \({\mathbb {R}}\setminus \{0\}\). It has exponential decay as \(|x|\rightarrow \infty \) and behaves like \(\frac{c}{2}-C|x|^{1/2}\) as \(|x|\rightarrow 0\). Ehrnström and Wahlén conjecture in [22] that \(C=\sqrt{\pi /8}\)
The goal of this paper is to prove the existence of an extreme solitary-wave solution of (1) and our plan is to use a global bifurcation theorem appearing in [11]; see also [10, 15, 16]. The first main step is the construction of a local bifurcation curve, emanating from the point \((\varphi , c) = (0, 1)\), and the second is the application of the global bifurcation theorem.
A key to our success is the fact that a lot of qualitative properties have been shown for the Whitham kernel, the Whitham symbol and the solutions of (1), thanks to [9, 21, 22]. These guide us in choosing a convenient function space to study (1) and have been extremely useful in the application of the global bifurcation theorem. In Sect. 2, we list the relevant properties and prove an integral identity. We also study how sequences of solutions converge and the Fredholm properties of important linear operators.
Another key is the recently developed center manifold theorem for nonlocal equations in [24]. This result states that nonlocal equations with exponentially decaying convolution kernels are essentially local equations near an equilibrium. It also provides a method to derive the local equation, which can then be studied using familiar ODE tools. In our case, the equilibrium is \((\varphi , c) = (0, 1)\). Although the Whitham kernel has the required exponential decay, it fails a local integrability condition. Seeing that this condition is only for proving Fredholm properties of linear operators, we directly prove these properties instead. All necessary changes for the general center manifold theorem are listed in Appendix B. In Sect. 3, we state the center manifold theorem for the Whitham equation and compute the corresponding local equation. More specifically, we prove the following.
Lemma 1.1
There exist a neighborhood \({\mathcal {V}}' \subset {\mathbb {R}}\) of \(c=1\) and a number \(\delta ' > 0\) such that if \(\varphi :{\mathbb {R}}\rightarrow {\mathbb {R}}\) satisfies \(\sup _{y\in {\mathbb {R}}} \Vert \varphi (\, \cdot \, + y)\Vert _{H^3([0,1])} \le \delta '\), then \(\varphi \) solves (1) with wave speed \(c \in {\mathcal {V}}'\) if and only if \(\varphi \) solves the second-order ODE
The ODE in this lemma is a c-dependent family of perturbed KdV equations. Restricting to \(c>1\) with c sufficiently close to 1, it features a unique positive even solitary-wave solution \(\varphi \) with exponential decay for each fixed c. Using Eq. (2), we show that \(\sup _{y \in {\mathbb {R}}} \Vert \varphi (\, \cdot \, + y)\Vert _{H^3([0,1])} \lesssim c-1\). So for c sufficiently close to 1, \(\varphi \) is also a solution to equation (1). We thus arrive at the first main result of this paper (repeated as Theorem 3.3 in Sect. 3).
Theorem 1.2
There exists a unique local bifurcation curve \({\mathcal {C}}_{loc}\) which emanates from \((\varphi , c) = (0,1)\) and consists of the non-trivial even solitary-wave solutions \(\varphi \) to (1) with wave speeds \(c \in {\mathcal {V}}'\) satisfying \(\sup _{y \in {\mathbb {R}}} \Vert \varphi ( \, \cdot \, + y)\Vert _{H^3([0,1])} < \delta '\).
While both [19] and [31] contain existence results for supercritical solitary waves, the additional information provided by the center manifold approach concerning uniqueness is crucial in the subsequent analysis. To end Sect. 3, we use the center manifold theorem to prove that the linearization of the left-hand side of (1) along \({\mathcal {C}}_{loc}\) is invertible. This is in preparation for the global bifurcation theorem.
The global bifurcation theory in [11] can now be applied to extend \({\mathcal {C}}_{loc}\) and this extension is referred to as the global bifurcation curve \({\mathcal {C}}\). The theory dictates several possible behaviors for \({\mathcal {C}}\) and the content of Sect. 4 is the exclusion of unwanted behaviors. We rule out the loss of compactness alternative using qualitative properties of the solutions, how sequences of solutions converge and an integral identity for (1). Then, we show that the blowup alternative happens as the Sobolev norm blows up and that an extreme solitary-wave solution is obtained in the limit. More precisely, we have the following result (repeated as Theorem 4.8 in Sect. 4).
Theorem 1.3
There exists a sequence of elements \((\varphi _n, c_n)\) on the global bifurcation curve \({\mathcal {C}}\) such that \(\lim _{n\rightarrow \infty } \Vert \varphi _n\Vert _{H^3} = \infty \) and \((\varphi _n, c_n)\rightarrow (\varphi , c)\) locally uniformly, where \(\varphi \) is a solitary-wave solution of (1) with supercritical wave speed \(c>1\). The solitary solution \(\varphi \) is even, bounded, continuous, exponentially decaying, smooth everywhere except at the origin and
for some constants \(0< C_1 <C_2\).
The function \(\varphi \) in the above theorem is the extreme solitary-wave solution we set out to find and is illustrated in Fig. 1.
By demonstrating the use of recent spatial-dynamics tools, this paper serves as an example to studies of other nonlocal nonlinear evolution equations. In particular, these results will likely extend to a larger class of equation, such as in [5] and [20].
Finally, it is interesting to compare our results with the global bifurcation theory for the water wave problem. The existence of an unbounded, connected set of solitary water waves, including a highest wave in a certain limit, was proved by Amick and Toland [2, 3] following several earlier small-amplitude results. Around the same time, Amick et al. [1] verified Stokes’ conjecture for both periodic and solitary water waves, showing in particular that the limiting solitary wave is Lipschitz continuous at the crest with a corner enclosing a \(120^\circ \) angle. Thus, the behavior at the crest is different from the extreme Whitham wave, which has no corner due to the \(C^{1/2}\) cusp in Theorem 1.3. The construction of the global solution continua in [2, 3] is also different from ours. While both proofs are based on nonlinear integral equations, the common approach in [2, 3] is to first apply global bifurcation theory to a regularized problem and then pass to the limit. On the other hand, we use global bifurcation theory directly on the solitary Whitham problem. A similar approach has in fact recently been used for solitary water waves with vorticity and stratification, but based on a PDE formulation [11, 32]. For the water wave problem with vorticity and stratification, the limiting behavior of large-amplitude waves is more complex and there is numerical and some analytical evidence of overhanging waves; see for example [14, 17, 18, 28] and references therein.
1.1 Notation
We use the following notations for function spaces.
-
The space of pth power integrable functions on an interval \(I \subset {\mathbb {R}}\) with respect to a measure \(\mu \) is denoted by
$$\begin{aligned} L^p(I, \mu ) \,\, :=\left\{ f:{\mathbb {R}}\rightarrow {\mathbb {R}}\, \Big | \, \Vert f\Vert _{L^p(\mu )} < \infty \right\} , \end{aligned}$$where
$$\begin{aligned} \Vert f\Vert _{L^p(I,\mu )} \,\, :=\left( \int \limits _I |f|^p \mathop {}\!\mathrm {d}\mu \right) ^{1/p} \text { if } \, \, p \in [1, \infty ) \end{aligned}$$and
$$\begin{aligned} \Vert f\Vert _{L^\infty (I,\mu )}\,\, :=\mu \text {-ess-sup }_{x\in I} |f(x)| \,\text { if } \, \, p = \infty . \end{aligned}$$For \(\sigma \in {\mathbb {R}}\), we write
$$\begin{aligned} L^p(I)| \,\,:=\, L^p(I, \mathop {}\!\mathrm {d}x), \quad L^p \,\,:=\, L^p({\mathbb {R}}, \mathop {}\!\mathrm {d}x) \quad \text { and } \quad L^p_\sigma \,\, :=\,L^p({\mathbb {R}}, \omega _\sigma ^p \cdot \mathop {}\!\mathrm {d}x), \end{aligned}$$where \(\mathop {}\!\mathrm {d}x\) is the Lebesgue measure and \(\omega _\sigma :{\mathbb {R}}\rightarrow {\mathbb {R}}\) is a positive and smooth function, which equals \(\exp (\sigma |x|)\) for \(|x|>1\). In particular, functions in \(L^p_\eta \) when \(\eta > 0\) are necessarily exponentially decaying while functions in \(L^p_{-\eta }\) can grow exponentially.
-
The Sobolev space is denoted by
$$\begin{aligned} W^{j,p}(I) \,\,:=\left\{ f:I \rightarrow {\mathbb {R}}\, \Big | \, f^{(n)} \in L^p(I), \, \, \text { for } \, \, 0 \le n \le j \right\} \end{aligned}$$and the weighted Sobolev space is
$$\begin{aligned} W^{j,p}_\sigma \,\, :=\left\{ f:{\mathbb {R}}\rightarrow {\mathbb {R}}\, \Big | \, f^{(n)} \in L^p_\sigma , \, \, \text { for } \, \, 0 \le n \le j \right\} , \end{aligned}$$where \(f^{(n)}\) are weak derivatives of f for \(1\le n \le j\). These spaces are equipped with the norms
$$\begin{aligned} \Vert f\Vert _{W^{j,p}} \,\,:=\left( \sum _{n=0}^j \Vert f^{(n)}\Vert _{L^p}^p\right) ^{1/p} \text { and }\quad \Vert f\Vert _{W^{j,p}_\sigma } \,\,:=\left( \sum _{n=0}^j \Vert f^{(n)}\Vert _{L^p_\sigma }^p\right) ^{1/p}. \end{aligned}$$We have the natural inclusions \(W_{\sigma _2}^{j,p} \subset W_{\sigma _1}^{j,p}\) whenever \(\sigma _1 < \sigma _2\). For \(p=2\), we denote the Hilbert spaces \(W^{j,2}(I)\) and \(W^{j,2}_\sigma \) by \(H^j(I)\) and \(H^j_\sigma \), respectively. As before, when \(I = {\mathbb {R}}\), we omit writing \({\mathbb {R}}\).
-
We define the space of uniformly local \(H^j\) functions
$$\begin{aligned} H_{{{\,\mathrm{u}\,}}}^j \,\, :=\left\{ f \in H^j_{{{\,\mathrm{loc}\,}}} \, \Big | \, \Vert f\Vert _{H^j_{{{\,\mathrm{u}\,}}}} < \infty \right\} , \,\,\text { where }\quad \Vert f\Vert _{H^j_{{{\,\mathrm{u}\,}}}} \,\,:=\sup _{y \in {\mathbb {R}}} \Vert f(\, \cdot \, +y)\Vert _{H^j([0,1])}. \end{aligned}$$ -
\(C^k\) denotes the space of k times continuously differentiable functions \(f:{\mathbb {R}}\rightarrow {\mathbb {R}}\). \(BUC^k \subset C^k\) denotes the space of functions with bounded and uniformly continuous derivatives of order up to and including k. \(C^{k,\alpha }\) denotes the Hölder spaces
$$\begin{aligned} C^{k,\alpha }\,\, :=\left\{ f \in BUC^k \, \Big | \, \sup _{h\ne 0} \frac{|f^{(k)}(x+h) - f^{(k)}(x)|}{|h|^\alpha } < \infty \right\} . \end{aligned}$$ -
The Besov space is denoted by \(B^s_{p,q}\), where \(s\in {\mathbb {R}}\), \(p, q \in [1, \infty ]\). We have
$$\begin{aligned} B^s_{2,2} = H^s, \, \, s \in {\mathbb {R}}\,\,\text { and }\,\, B^s_{\infty , \infty } = C^{\left\lfloor {s}\right\rfloor , s-\left\lfloor {s}\right\rfloor }, \, \, s\in {\mathbb {R}}_+ \setminus {\mathbb {N}}. \end{aligned}$$ -
\({\mathscr {C}}^k({\mathcal {X}}, {\mathcal {Y}})\) denotes the space of k times Fréchet differentiable mappings between two normed spaces \({\mathcal {X}}\) and \({\mathcal {Y}}\).
We use the following scaling of the Fourier transform:
and
2 Qualitative properties
2.1 The Whitham kernel and the Whitham symbol
The Whitham kernel K is given by \(({\mathcal {F}}^{-1}m)(x)\), where
Since \(m(0) = 1\), we have \(\int _{\mathbb {R}}K \, \mathop {}\!\mathrm {d}x = 1\). However, since \(m \notin L^1\), K is singular at the origin. More specifically,
where \(K_{reg}\) is real analytic on \({\mathbb {R}}\); see Proposition 2.4 in [22]. In addition, as \(|x| \rightarrow \infty \),
by Corollary 2.26 in [22]. Since m is an even function, so is K. The fact that K is a positive function has been shown in Proposition 2.23 in [22].
Because the Whitham symbol m satisfies
the linear operator
is bounded; see for example Proposition 2.78 in [6].
2.2 Properties of solutions
When choosing appropriate function spaces for (1), we will rely on the following qualitative properties of solutions.
Proposition 2.1
Let \(\varphi \) be a continuous and bounded solution to (1) with wave speed \(c\ge 1\). We have
-
(i)
(non-negativity) \(\varphi \ge 0\);
-
(ii)
(exponential decay) if \(\varphi \) is solitary and \(c > 1\), there exists \(\eta > 0\) such that \(\exp (\eta |x|) \varphi (x) \in L^\infty ({\mathbb {R}})\), that is, \(\varphi \) has exponential decay;
-
(iii)
(symmetry) if \(\varphi \) is solitary, \(c > 1\) and \(\sup _{x\in {\mathbb {R}}} \varphi (x) < c/2\), there exists \(x_0 \in {\mathbb {R}}\) such that \(\varphi (\, \cdot \, - x_0)\) is an even function which is non-increasing on \([0,\infty )\);
-
(iv)
(regularity) \(\varphi \) is smooth on any open set where \(\varphi < c/2\);
-
(v)
(boundedness) if \(\varphi \) is of class \(BUC^1\), even, non-constant and non-increasing on \((0, \infty )\), then \(\varphi ' < 0\) and \(\varphi < c/2\) on \((0,\infty )\). If \(\varphi \) in addition is of class \(BUC^2\), then \(\varphi < c/2\) everywhere;
-
(vi)
(singularity) if \(\varphi \) is even, non-constant, non-increasing on \((0, \infty )\), \(\sup _{x\in {\mathbb {R}}}\varphi (x) \le c/2\) and \(\varphi (0) = c/2\), then as \(|x|\rightarrow 0\),
$$\begin{aligned} C_1|x|^{\frac{C}{2}} \le \frac{1+c}{2} - \varphi (x) \le C_2|x|^{\frac{1}{2}}; \end{aligned}$$ -
(vii)
(lower bound on the wave speed) if \(\varphi \) is non-trivial and has finite limits \(\lim _{x \rightarrow \pm \infty } \varphi (x)\), then \(c > 1\);
-
(viii)
(upper bound on the wave speed) if \(\varphi \) is non-constant and \(\varphi \le c/2\), then \(c\le 2\).
Item (i) is stated in Lemma 4.1 in [22]. Items (ii) and (iii) are Proposition 3.13 and Theorem 4.4 in [9] respectively. The optimal exponent \(\eta =\eta _c\) depends on c and is given implicitly by \(\sqrt{\tan (\eta _c)/\eta _c}=c\), with \(\eta _c\in (0,\pi /2)\); see [5], Theorem 6.2. We remark that the requirement \(\sup _{x \in {\mathbb {R}}} \varphi (x) < c/2\) in (iii) is not mentioned in [9] despite its importance in the proof; see the introduction in [30] for a detailed discussion. Items (iv), (v) and (vi) can be found in Theorem 4.9, Theorem 5.1 and Theorem 5.4 in [22]. The upper bound in (viii) comes from [22], Eq. (6.9). The lower bound in (vii) comes from non-negativity and the following proposition.
Proposition 2.2
Let \(\varphi \) be a bounded and continuously differentiable solution to (1) with wave speed c, such that the limits \(\lim _{x \rightarrow \pm \infty } \varphi (x)\) exist. Then
In particular, \(\inf \varphi< c-1 < \sup \varphi \), \(\varphi \equiv c-1\) or \(\varphi \equiv 0\) if \(c\ge 1\). The latter statement is in fact true for bounded and continuous solutions \(\varphi \) with finite limits \(\lim _{x \rightarrow \pm \infty } \varphi (x)\).
Proof
In general, if \(\varphi \) is any bounded and continuously differentiable function, the limits \(\lim _{x\rightarrow \pm \infty } \varphi (x)\) exist, and \({\mathcal {K}}\) is any non-negative even function with \(\int _{\mathbb {R}}{\mathcal {K}}\mathop {}\!\mathrm {d}x = 1\), then
A proof of this can be found in [8], pp. 113–114.
Since \(\varphi \) solves (1) with wave speed c,
and since the Whitham kernel K is a non-negative even function with \(\int _{\mathbb {R}}K \mathop {}\!\mathrm {d}x = 1\),
By non-negativity of bounded and continuous solutions with \(c\ge 1\), \(\varphi - (c-1)\) must be sign-changing, \(\varphi \equiv 0\), or \(\varphi \equiv c-1\), otherwise the generalized integral cannot converge to zero. This proves the claim for bounded and continuously differentiable functions \(\varphi \).
If \(\varphi \) is only a bounded and continuous solution, convolution with a non-zero smooth and compactly supported test function \(\phi \ge 0\) gives
The left-hand side equals
due to associativity and commutativity of convolution. By Lebesgue’s dominated convergence theorem, the function \(\phi *\varphi \) is bounded, continuously differentiable and the limits as \(x \rightarrow \pm \infty \) exist. It follows that
which implies
Again, we must have \(\varphi \equiv 0\), \(\varphi \equiv c-1\), or \(\varphi -(c-1)\) is sign-changing. \(\square \)
2.3 Convergence of solution sequences
Modes of convergence of solution sequences will be important in ruling out alternatives from the global bifurcation theorem. We start with pointwise convergence, using the Arzelà—Ascoli theorem and the smoothing property of convolution with K.
Proposition 2.3
Let \((\varphi _n)_{n=1}^\infty \) be a sequence of continuous and bounded solutions to (1) such that each \(\varphi _n\) has wave speed \(c_n \in [1,2]\) and \(\sup _{x\in {\mathbb {R}}} \varphi _n(x) \le c_n/2\). Then, there exists a subsequence \((\varphi _{n_k})_{k=1}^\infty \) satisfying
for every \(x\in {\mathbb {R}}\). The convergence is uniform on every bounded interval of \({\mathbb {R}}\). The limit \(\varphi \) is a continuous, bounded and non-negative solution of (1) with wave speed c, and \(\sup _{x\in {\mathbb {R}}} \varphi (x) \le c/2\).
Proof
We can without loss of generality assume that \(\lim _{n\rightarrow \infty } c_n = c \in [1, 2]\). For each n, we have
A rearrangement gives
We claim that the right-hand side forms an equicontinuous sequence. Indeed, \(\varphi \mapsto K*\varphi \) is a bounded map from \(L^\infty \subset B_{\infty , \infty }^0\) to \(B^{1/2}_{\infty , \infty }=C^{1/2}\) according to (6). Because \(c_n \in [1,2]\), this gives
Hence, \((K*\varphi _n)_{n=1}^\infty \) is an equicontinuous sequence of functions. The square root of a non-negative equicontinuous sequence is an equicontinuous sequence. So, \((\varphi _n)_{n=1}^\infty \) is equicontinuous. The Arzelà—Ascoli theorem gives a subsequence \((\varphi _{n_k})_{k=1}^\infty \), which converges uniformly to a function \(\varphi \) on each bounded interval of \({\mathbb {R}}\). Also, \(\varphi \) is continuous and bounded by c/2.
Finally, since \(\sup _{x\in {\mathbb {R}}}\varphi _n(x) \le 1\) and \(\Vert K\Vert _{L^1} = 1\), Lebesgue’s dominated convergence theorem gives \(K*\varphi _n(x) \rightarrow K*\varphi (x)\) as \(n\rightarrow \infty \) for all x. It follows that \(\varphi \) is a solution to (1) with wave speed c. \(\square \)
Here are several immediate consequences.
Corollary 2.4
-
(i)
If \(\varphi \) solves (1) with wave speed \(c \in [1,2]\), \(\sup _{x\in {\mathbb {R}}} \varphi (x) \le c/2\), and \(\lim _{x\rightarrow \infty } \varphi (x) = a\), then a solves (1) with wave speed c. In particular, the constant a is either zero or \(c-1\).
-
(ii)
Let \(\varphi _n\), \(c_n\), \(\varphi \) and c be as in Proposition 2.3. If \(\varphi _n\) is even and monotone on \([0, \infty )\) for each n, its locally uniform limit \(\varphi \) inherits evenness and monotonicity on \([0, \infty )\). If in addition \(\lim _{|x|\rightarrow \infty } \varphi (x) = 0\), then \(\varphi _n\) converges to \(\varphi \) uniformly on \({\mathbb {R}}\).
-
(iii)
Let \((\varphi _n)_{n=1}^\infty \) be a sequence of even solutions which are decreasing on \([0, \infty )\). Define \(\tau _{x_n}\varphi _n\,\, :=\varphi _n(\, \cdot \,+x_n)\) for a sequence of real numbers \(x_n\) with \(\lim _{n\rightarrow \infty } x_n= \infty \). Then, the sequence of translated solutions \(\tau _{x_n}\varphi _n\) is a sequence of solutions to (1). It has a non-increasing locally uniform limit \({\tilde{\varphi }}\).
Proof
Item (iii) is straightforward. We only prove items (i) and (ii) .
For (i), we define
Each \(\tau _n \varphi \) is a solution of (1) with wave speed \(c \in [1, 2]\). We have
By Proposition 2.3, a is a constant solution to (1) with wave speed c and hence by Proposition 2.2, we have \(a=0\) or \(a=c-1\).
The evenness and monotonicity in (ii) are clear, so assume that \(\lim _{|x|\rightarrow \infty } \varphi (x) = 0\) and fix \(\epsilon > 0\). Then, there exists \(R > 0\) such that
Due to \(\lim _{n\rightarrow \infty } \varphi _n(x) = \varphi (x)\) locally uniformly, there exists an \(N_\epsilon > 0\) such that
In particular, we have \(|\varphi _n(R) - \varphi (R)| \le \epsilon \), which in turn implies \(|\varphi _n(R)|\le 2\epsilon \) by (8). Since \(\varphi _n\) is non-increasing, we have \(|\varphi _n(x)| \le 2\epsilon \) for \(|x| \ge R\). But then, again by (8), \(|\varphi _n(x) - \varphi (x)| \le 3\epsilon \) for \(|x| \ge R\) and \(n > N_\epsilon \), and the claim about uniform convergence is proved. \(\square \)
Now, we consider convergence in \(H^j\) for \(j>0\). Combining the smoothing property of convolution with K and (1), we use a bootstrap argument to increase the regularity of the solutions, starting with convergence in \(L^2 = H^0\).
Proposition 2.5
Let \(\varphi _n, c_n, \varphi \) and c be as in Proposition 2.3. If
-
(a)
\(\varphi _n \rightarrow \varphi \) uniformly and \(\varphi _n \rightarrow \varphi \) in \(L^2\),
-
(b)
\(\sup _{x\in {\mathbb {R}}}\varphi _n(x) < c_n/2\) and \(\sup _{x\in {\mathbb {R}}}\varphi (x)< c/2\),
then \(\varphi _n \rightarrow \varphi \) in \(H^j\) for any \(j > 0\).
Proof
Since \(\varphi _n\) and \(\varphi \) solve (1) with wave speed \(c_n\) and c respectively, we can write
Letting \(\omega _n = K*\varphi _n\) and \(\omega = K*\varphi \), the assumptions imply
-
(a’)
\(\omega _n \rightarrow \omega \) in \(H^{1/2}\) and \(\omega _n \rightarrow \omega \) uniformly,
-
(b’)
\(\inf _{n,x} \left( \frac{c_n^2}{4} - \omega _n\right) > \varepsilon /3\),
-
(c’)
\(\inf _{n, x} \left( \frac{c^2}{4} - \omega _n\right) > \varepsilon /3,\)
for some \(\varepsilon > 0\) and for sufficiently large n. Without loss of generality, (b’) and (c’) are assumed to hold for all n. We claim that if (a’), (b’) and (c’) are met, then
Consider
A quick calculation gives
Define
For each n, \(g_n\) is smooth and \(g_n(0) = 0\). Moreover, the range of \(\omega _n\) belongs to the domain of \(g_n\). A standard result in the theory of paradifferential operators, for instance Theorem 2.87 in [6], gives
where \(C > 0\) depends on \(j, \sup _{x\in {\mathbb {R}}}|\omega _n|\) and \(\sup _{x \in D_{g_n}} |g'_n(x)|\). A computation shows that \(|g_n'|\) is uniformly bounded in n for \(c_n, c\in [1,2]\) and \(x \in D_{g_n}\). Also, \(\sup _n \Vert \omega _n\Vert _{H^{1/2}} < \infty \), as well as \(\sup _{n,x} |\omega _n(x)| < \infty \) by (a’). It follows that \(\Vert g_n(\omega _n)\Vert _{H^j}\) is uniformly bounded in n and
To deal with the second term, let c be fixed and define
Then, we can write
Due to (a’) and (b’), we have \(\omega _n(s)+\tau (\omega (s)-\omega _n(s)) \in D_h\) for all \(s \in {\mathbb {R}}\). Note that h is smooth and \(h(0) = 0\). Theorem 2.87 in [6] gives an estimate for the integral
where C depends on s, \(\sup _x |f''(x, c)|\), c and \(\varepsilon \). Another standard result in paradifferential calculus, for example Theorem 8.3.1 in [29], gives
for all \(j \in (0, 1/2)\), which tends to 0 as \(n\rightarrow \infty \) by (a’).
So, the right-hand side of (9) tends to 0 in \(H^{j}\) for all \(j \in (0, 1/2)\). Hence, \(\varphi _n \rightarrow \varphi \) in \(H^j\). Then, convolution with K increases the regularity of \(\varphi _n\) and \(\varphi \) by 1/2. Choosing \(j=1/4\) and replacing (a’) with
the critical case of Theorem 8.3.1 in [29] is no longer relevant and the convergence is in \(H^{j'}\) for all \(j' \in (0, 1/4+1/2]\). By iterating as many times as needed, the claim of the proposition is proved.\(\square \)
Remark 2.6
Since Theorem 2.87 in [6] and Theorem 8.3.1 in [29] are valid for the Besov spaces \(B^s_{p,q}\), we can replace the \(L^2\) space in (a) with \(B^0_{p,q}\) and obtain \(\varphi _n \rightarrow \varphi \) in \(B^s_{p,q}\) for \(s > 0\) using the same proof idea.
2.4 Fredholmness of linear operators
Let \(j > 0\) be an integer. As a preparation for future bifurcation results, we study the operators
and
where \(\varphi ^*\) is a solitary-wave solution with wave speed \(c^*>1\), satisfying \(\sup _{x\in {\mathbb {R}}}\varphi ^*(x) < c^*/2\). These are linearizations of the left-hand side in (1) at (0, 1) and \((\varphi ^*, c^*)\), respectively. We show that \({\mathcal {T}}\) and \(L[\varphi ^*, c^*]\) are Fredholm with Fredholm index two and zero respectively, using results from [27]. The central idea is to relate a pseudodifferential operator \(t(x,{{\,\mathrm{D}\,}}):H^j \rightarrow H^j\) to a positively homogeneous function A via the symbol \(t(x,\xi )\). By studying the boundary value and the winding number of A around the origin, the Fredholm property of \(t(x,{{\,\mathrm{D}\,}})\) can be determined. Appendix A summarizes the relevant theorems from [27].
Up until now, the weight \(\eta > 0\) has remained somewhat mysterious. Since our interest lies in the Fredholm properties of \({\mathcal {T}}\), \(\eta \) should be chosen so that \({\mathcal {T}}\) is at least bounded. By (4), K is locally \(L^1\) around the origin. From (5), we deduce that \(K \in L^1_{\eta _0}\) for \(\eta _0 \in (0, \pi /2)\). It follows that \({\mathcal {T}}:H^j_{-\eta } \rightarrow H^j_{-\eta }\) is bounded for any \(\eta \in (0, \pi /2)\). Indeed, since \(\omega _{-\eta }\) is 1 on \([-1,1]\) and equals \(\exp (-\eta |x|)\) as \(|x|\rightarrow \infty \), we have
where Young’s inequality for the \(L^p\) norms of convolutions is used in the last step. Noting that
and applying the above estimates on \(\varphi ^{(n)}\),
for \(\eta \) in the range \((0, \pi /2)\).
2.4.1 Fredholmness of \({\mathcal {T}}\)
Multiplication with \(\cosh (\eta \, \cdot \,)\)
is an invertible linear operator. Its inverse is multiplication with \(1/\cosh (\eta \, \cdot \,),\) mapping \(H^j_{-\eta }\) to \(H^j\). Conjugating \({\mathcal {T}}\) with these gives
and more explicitly
Setting
\(\tilde{{\mathcal {T}}}\) can be rewritten as
with the symbol
Lemma 2.7
The conjugated pseudodifferential operator \(\tilde{{\mathcal {T}}}= {\tilde{t}}(x,{{\,\mathrm{D}\,}}):H^j \rightarrow H^j\) is a Fredholm operator.
Proof
The idea is to apply Proposition A.1. We define a positively homogeneous function A by
for \(x, \xi \in {\mathbb {R}}\) and \(x_0, \xi _0 >0\). In order to apply Proposition A.1, we need to check that A is smooth in
and that \(A(x_0, x, \xi _0, \xi ) \ne 0\) on \(\Gamma \), where \(\Gamma \) is the boundary of \(\overline{{\mathbb {S}}}\). \(\Gamma \) can be decomposed into the arcs
We compute the value of A along each arc \(\Gamma _i\) and show that A is nowhere vanishing. From the computations, it will be apparent that A is smooth on \(\overline{{\mathbb {S}}}\).
On \(\Gamma _1^*\,\,{:=}\,\, \Gamma _1\setminus \{(0,1,0,1), (0,1,0,-1)\}\), we have \(\xi _0 = \sqrt{1-\xi ^2} > 0\) and
since \(\lim _{y\rightarrow \infty } \phi _+(y)=1\) and \(\lim _{y\rightarrow \infty } \phi _-(y)=0\). Let \(\theta = \xi (1-\xi ^2)^{-1/2}\). As \(\xi \in (-1,1)\), \(\theta \in (-\infty , \infty )\). To compute the values at the endpoint (0, 1, 0, 1), we note that taking the limit as \(\xi \rightarrow 1^-\) corresponds to taking the limit as \(\theta \rightarrow \infty \). A calculation shows that
which gives
So, the value of A at (0, 1, 0, 1) is 1. Similarly, A at \((0,1,0,-1)\) corresponds to taking the limit as \(\theta \rightarrow -\infty \) and the value is 1. Along \(\Gamma _1^*\), if \(1-m(\theta -\text {i}\eta )=0\) for some \(\theta \in {\mathbb {R}}\), then
where
and
The second equation is satisfied only when the numerator \(\eta \sinh (2\theta ) - \theta \sin (2\eta )\) is zero. Since this is an odd and smooth function in \(\theta \), a trivial solution is \(\theta = 0\). Since
for \(\theta \ne 0\) and \(\eta \in (0, \pi /2)\), there are no other solutions. When \(\theta =0\), \({{\,\mathrm{Re}\,}}(m(\theta -\text {i}\eta )^2)\) is \(\tan (\eta )/\eta > 1\) for all \(\eta \in (0, \pi /2)\). We can thus conclude that \(A \ne 0\) on \(\Gamma _1\).
Similar computations yield
which is nowhere vanishing by the same argument. Along the other arcs,
So, A along \(\Gamma \) is nowhere vanishing and Proposition A.1 gives the desired conclusion. \(\square \)
The next result is about the Fredholm index of \(\tilde{{\mathcal {T}}}\).
Lemma 2.8
\(\tilde{{\mathcal {T}}}= {\tilde{t}}(x, {{\,\mathrm{D}\,}}):H^j \rightarrow H^j\) has Fredholm index two.
Proof
According to Proposition A.1, the total increase of the argument of A as \(\Gamma \) is traversed with the counter-clockwise orientation

determines the Fredholm index of \(t(x, {{\,\mathrm{D}\,}})\). We begin with \(\Gamma _1\) from \((0,1, 0, -1)\) to (0, 1, 0, 1) and consider the total increase of the argument of \(1 - m(\theta - \text {i}\eta )\) from \(\theta = - \infty \) to \(\theta = \infty \); see the proof of Lemma 2.7. As before, it is easier to deal with \(m(\theta - \text {i}\eta )^2\). The sign of the real part of \(m(\theta - \text {i}\eta )^2\) is determined by the sign of
which is positive for \(\theta \in {\mathbb {R}}\) and \(\eta \in (0, \pi /2)\). This means that \(m^2\) stays in the first and fourth quadrant of \({\mathbb {C}}\). The sign of the imaginary part equals the sign of
which is a strictly increasing function in \(\theta \) taking the value zero at \(\theta =0\). This means that at \(\theta =0\), \(m^2\) enters the first quadrant from the fourth. By computing the value of \(m^2\) as \(\theta \rightarrow -\infty \), at \(\theta = 0\) and as \(\theta \rightarrow \infty \), we can conclude that \(m^2\) along \(\Gamma _1\) makes one counter-clockwise revolution about 1. Taking the square root of \(m^2\) preserves the signs of the real and imaginary part. Then, multiplication with \(-1\) flips the signs and addition with 1 corresponds to horizontal translation to the right by 1; see Fig. 2. Finally, we arrive at the conclusion that the increase of the argument of A along \(\Gamma _1\) from \((0,1,0,-1)\) to (0, 1, 0, 1) is \(2\pi \).
A similar analysis shows that an additional increase of \(2\pi \) is gained along \(\Gamma _2\). On \(\Gamma _3\) and \(\Gamma _4\), \(A \equiv 1\), so there is no contribution from these arcs. In total, the increase of the argument along \(\Gamma \) is \(4\pi \). Proposition A.1 now gives that the Fredholm index is two. \(\square \)

Graphs of \(m^2\) (larger loop) and \(1-m\) (smaller loop) along \(\Gamma _1\). The increase of the argument of \(1-m\) about the origin equals the increase of the argument of \(m^2\) around 1, which is \(2\pi \)
Conjugation with the invertible linear operator \(M_{\cosh }\) preserves Fredholmness and the Fredholm index. Hence, \({\mathcal {T}}= M_{\cosh } \circ \tilde{{\mathcal {T}}}\circ M_{\cosh }^{-1}:H^j_{-\eta } \rightarrow H^j_{-\eta }\) is Fredholm with Fredholm index two. We have proved the first part of the main result of this section, which is the following.
Proposition 2.9
\({\mathcal {T}}:H^j_{-\eta } \rightarrow H^j_{-\eta }\) is Fredholm with Fredholm index two and
Proof
The statement concerning the Fredholm properties of \({\mathcal {T}}\) is already proved. Note that solving \({\mathcal {T}}\varphi = 0\) for \(\varphi \in L^2_{-\eta }\) using the Fourier transform is problematic because \({\mathcal {F}}\varphi \) is not necessarily a tempered distribution. Thus, we consider the \(L^2\)-adjoint of \({\mathcal {T}}:L^2_{-\eta } \rightarrow L^2_{-\eta }\), which is \({\mathcal {T}}:L^2_\eta \rightarrow L^2_\eta \), and determine its range. The equation \({\mathcal {T}}\psi = g\) in \(L^2_\eta \) corresponds to \((1-m) {\mathcal {F}}\psi = {\mathcal {F}}g\) on the Fourier side, where \({\mathcal {F}}\psi \) and \({\mathcal {F}}g\) are analytic functions bounded on the strip \(|{{\,\mathrm{Im}\,}}z| < \eta \). In view of (3), \(1-m(\xi )\) vanishes to second order at \(\xi = 0\) and is bounded away from zero if \(\xi \) is. As a consequence, the range of \({\mathcal {T}}\) on \(L^2_\eta \) consists of functions g satisfying \({\mathcal {F}}g(0) = ({\mathcal {F}}g)'(0) = 0\), or equivalently \(\int _{\mathbb {R}}g(x) \mathop {}\!\mathrm {d}x = \int _{\mathbb {R}}x g(x) \mathop {}\!\mathrm {d}x = 0\). This immediately implies that \({{\,\mathrm{Ker}\,}}{\mathcal {T}}\) in \(L^2_{-\eta }\) is \({{\,\mathrm{span}\,}}\{1, x\} \subset H^j_{-\eta }\) and the claim is established. \(\square \)
2.4.2 Fredholmness of \(L[\varphi ^*, c^*]:H^j \rightarrow H^j\)
The application of Proposition A.1 is simpler for \(L[\varphi ^*, c^*]:H^j\rightarrow H^j\), as conjugation does not take place.
Proposition 2.10
Let \(\varphi ^*\) be a solution with wave speed \(c^*>1\), satisfying \(\sup _{x\in {\mathbb {R}}}\varphi ^*(x) < c^*/2\). Then \(L[\varphi ^*, c^*]:H^j \rightarrow H^j\) is Fredholm with Fredholm index zero.
Proof
Proposition A.1 is employed once again. The linear operator \(L[\varphi ^*, c^*]:\phi \mapsto c^*\phi - K*\phi - 2\varphi ^*\phi \) has the symbol
where smoothness of \(\varphi ^*\) is from Proposition 2.1(iv). The corresponding positively homogeneous function B is
As before, we verify that B does not vanish at any point along \(\Gamma = \cup _{1\le i \le 4}\Gamma _i\); see the proof of Lemma 2.7. Along \(\Gamma _1\) and \(\Gamma _2\),
as \(\varphi ^*\) is smooth and \(\lim _{|t|\rightarrow \infty } \varphi ^*(t) = 0\). Since \(m \le 1\), B cannot attain the value zero. Along \(\Gamma _3\) and \(\Gamma _4\), B is \(c^*-2\varphi ^*(x/\sqrt{1-x^2})\). Since \(\sup _{x\in {\mathbb {R}}} \varphi ^*(x)<c^*/2\) by assumption, B cannot take the value zero. Moreover, the argument of B is constant along \(\Gamma \) as B is real-valued and the claim is proved. \(\square \)
3 Local bifurcation
We apply an adaptation of the nonlocal center manifold theorem in [24] to (1) in order to construct a small-amplitude solitary-solution curve emanating from \((\varphi , c) = (0, 1)\). For convenience, we work with a different bifurcation parameter \(\nu \,\,:=c-1\) which will be small and positive along the local curve. In the notation of [24], Eq. (1) becomes
where \({\mathcal {T}}\) is defined in Sect. 2.4, and
Equation (10) will be studied for \(\nu \in (0, \infty )\), in the Sobolev space of even functions \(H^3_{even}\) and the weighted Sobolev spaces \(H^3_{-\eta }\). This regularity choice \(j=3\) is with regard to Proposition 2.1. A solution \(\varphi \in H^3_{even}\) with wave speed \(c>1\), such that \(\sup _{x\in {\mathbb {R}}} \varphi (x) < c/2\), is smooth on \({\mathbb {R}}\). Moreover, \(\varphi '<0\) on \((0, \infty )\) and \(\varphi \) has exponential decay.
The center-manifold reduction technique gives a reduced equation equivalent to the nonlocal Eq. (10) near the bifurcation point \((\varphi ,\nu )=(0,0)\) in \(H^3_{{{\,\mathrm{u}\,}}} \times {\mathbb {R}}\), where \(H^3_{{{\,\mathrm{u}\,}}}\) is the space of functions which are uniformly local \(H^3\). Since the reduced equation is an ODE, standard arguments give the existence of small-amplitude solitary-wave solutions in \(H^3_{-\eta }\). Hence, by the exponential decay of solitary-wave solutions with supercritical wave speed, these are of class \(H^3 \subset H^3_{{{\,\mathrm{u}\,}}}\). We also prove that the bifurcation curve of non-trivial even solitary solutions is locally unique in \(H^3_{{{\,\mathrm{u}\,}}} \times (0, \infty )\), and refer to it as \({\mathcal {C}}_{loc}\).
The global bifurcation theorem demands \(L[\varphi ^*, \nu ^*]\) to be invertible in \(H^3_{even}\) where \((\varphi ^*, \nu ^*)\in {\mathcal {C}}_{loc}\) and \(\nu ^*=c^*-1\). Seeing that the Fredholm index of \(L[\varphi ^*, \nu ^*]\) is zero, it suffices to show that the nullspace of \(L[\varphi ^*, \nu ^*]\) is trivial. We consider Eq. (10), together with the linearized equation \(L[\varphi ^*, \nu ^*]\phi =0\), and formulate a center manifold theorem for this system. Exploiting the previous reduction for (10), we simplify the reduced equation for the linearized problem and are able to solve it completely in \(H^3_{even}\).
3.1 Center manifold reductions
Two center manifold reductions are presented: one for the nonlinear problem (10) and the other for the linearized problem \(L[\varphi ^*, \nu ^*]\phi = 0\).
For (10), we use an adaptation of the center manifold theorem in [24]. In this reference, it is assumed that the convolution kernel belongs to \(W^{1,1}_{\eta }\), which is not the case for the Whitham kernel K, as \(K'\) is not locally \(L^1\) according to (4). Seeing that this requirement is only used for proving the Fredholm properties of the linear part \({\mathcal {T}}\), we replace it with requirements on the Fredholm properties on \({\mathcal {T}}\); see Hypothesis B.1(ii) in Appendix B.1. The rest of the proof of the center manifold theorem in [24] remains the same.
We consider (10) together with the modified equation
where \(\chi ^\delta (\varphi )\) is a nonlocal and translation invariant cutoff operator defined in Appendix B. We have \(\chi ^\delta (\varphi ) = \varphi \) if \(\Vert \varphi \Vert _{H^3_{{{\,\mathrm{u}\,}}}} \le C_0 \delta \) and \(\chi ^\delta (\varphi )=0\) if \(\Vert \varphi \Vert _{H^3_{{{\,\mathrm{u}\,}}}}\) is sufficiently large. Since \(H^3_{{{\,\mathrm{u}\,}}} \subset H^3_{-\eta }\) for all \(\eta > 0\), the operator \(\chi ^\delta \) is a cutoff in the \(H^3_{-\eta }\) norm. More details are provided in Appendix B.
We have shown that \({{\,\mathrm{Ker}\,}}{\mathcal {T}}\) has dimension two in \(H^3_{-\eta }\) and equals \({{\,\mathrm{span}\,}}\{1, x\}\). Hence, elements \(A+Bx \in {{\,\mathrm{Ker}\,}}{\mathcal {T}}\) will often be identified with \((A, B) \in {\mathbb {R}}^2\). We define a projection on \({{\,\mathrm{Ker}\,}}{\mathcal {T}}\),
which could also be considered as a mapping from \(H^3_{-\eta }\) to \({\mathbb {R}}^2\). Finally, the shift \(\varphi \mapsto \varphi (\, \cdot \, + \xi )\) will be denoted by \(\tau _\xi \).
Theorem 3.1
For equation (10), there exist a neighborhood \({\mathcal {V}}\) of \(0 \in {\mathbb {R}}\), a cutoff radiu s \(\delta \), a weight \(\eta ^* \in (0, \pi /2)\) and a map
with the center manifold
as its graph. We have
-
(i)
(smoothness) \(\Psi \in {\mathscr {C}}^3\);
-
(ii)
(tangency) \(\Psi (0, 0,0) = 0\) and \({{{{\,\mathrm{D}\,}}_{(A, B)}}}\Psi (0,0,0) = 0;\)
-
(iii)
(global reduction) \({\mathcal {M}}_0^\nu \) consists precisely of \(\varphi \) such that \(\varphi \in H^3_{-\eta ^*}\) is a solution of the modified equation (11) with parameter \(\nu \);
-
(iv)
(local reduction) any \(\varphi \) solving (10) with parameter \(\nu \) and \(\Vert \varphi \Vert _{H^3_{{{\,\mathrm{u}\,}}}} < C_0\delta \) is contained in \({\mathcal {M}}_0^\nu \);
-
(v)
(correspondence) any element \(\varphi = A+Bx + \Psi (A, B, \nu ) \in {\mathcal {M}}_0^\nu \) solves the local equation
$$\begin{aligned} \varphi ''(x) = f(\varphi (x), \varphi '(x), \nu ), \, \text { where } \, f(A, B, \nu ) = \Psi ''(A, B, \nu )(0), \end{aligned}$$(13)and conversely, any solution of this equation is an element in \({\mathcal {M}}_0^\nu \). The Taylor expansion of \(\Psi \) gives
$$\begin{aligned} \varphi ''= -6\varphi ^2 + \frac{19}{5} (\varphi ')^2 + 6\nu \varphi + {\mathcal {O}}\left( |(\varphi , \varphi ')|(\nu ^2 + |\varphi |^2 + |\varphi '|^2)\right) . \end{aligned}$$(14) -
(vi)
(equivariance) besides the translations \(\tau _\xi \), equations (10) and (11) possess a reflection symmetry \(R\varphi (x)\,\,:=\varphi (-x)\), meaning \({\mathcal {T}}R \varphi = R {\mathcal {T}}\varphi \), \({\mathcal {N}}(R \varphi , \nu ) = R {\mathcal {N}}(\varphi , \nu )\) and \(\chi ^\delta (R \varphi ) = R \chi ^\delta (\varphi )\). It is hence reversible. The function f in (v) commutes with all translations and anticommutes with the reflection symmetry.
Proof
We use Theorem B.5. Proposition 2.9 shows that Hypothesis B.1 is met. Also, the fact that \({\mathcal {N}}\) is a Nemytskii operator verifies Hypothesis B.3. In particular, \({\mathcal {N}}\in {\mathscr {C}}^\infty \) and \({\mathcal {N}}\) commutes with the translations \(\tau _\xi \) for all \(\nu \in (0, \infty )\). This means that in Hypothesis B.3, we can choose any regularity \(k \ge 2\), possibly at the price of a smaller cutoff radius \(\delta \) and weight \(\eta ^*\). Since a quadratic-order Taylor expansion of \(\Psi \) suffices for our purposes, \(k=3\) is chosen. Statement (vi) concerning the reflection symmetry R follows directly from K being an even function. Hence, Theorem B.5 applies and gives items (i)–(vi).
Equation (14) in (v) is given by Theorem B.5(vii). We use \({\mathcal {Q}}\) defined in (12) to compute the reduced vector field. Let \(\varphi \in {\mathcal {M}}_0^\nu \). According to Theorem B.5(viii), \({\mathcal {M}}^\nu _0\) is invariant under translation symmetries. Hence, \(\tau _\xi \varphi \) is also an element of \({\mathcal {M}}_0^\nu \) for all \(\xi \in {\mathbb {R}}\). Applying Theorem B.5(vii) on \(\tau _\xi \varphi \) gives
We compute \(\varphi ''(\xi )\) by noting that
and since \(\tau _\xi \varphi \in {\mathcal {M}}^\nu _0\),
Hence,
which is (13).
To prove Eq. (14), we compute the Taylor expansion of \(\Psi \). In view of \(\Psi (0, 0, 0) = 0\) and \({{{\,\mathrm{D}\,}}_{(A, B)}}\Psi (0, 0,0) = 0\), the Taylor expansion of \(\Psi :{\mathbb {R}}^2 \times {\mathcal {V}}\rightarrow {{\,\mathrm{Ker}\,}}{\mathcal {Q}}\) is
where \(\Psi _{ijk} \in {{\,\mathrm{Ker}\,}}{\mathcal {Q}}\) for \(1 \le i+j+k \le 2\). Since \({\mathcal {N}}(0, \nu ) = 0\), we have \(\Psi (0,0,\nu ) = 0\) and consequently \(g(\nu ) = 0\) for all \(\nu \in {\mathbb {R}}\). So, elements \(\varphi \) in the center manifold \({\mathcal {M}}_0^\nu \) have the form
Substituting \(\varphi = A+ Bx + \Psi (A, B, \nu )\) into (10), then identifying coefficients of orders \({\mathcal {O}}(A\nu )\), \({\mathcal {O}}(B\nu )\), \({\mathcal {O}}(A^2)\), \({\mathcal {O}}(AB)\) and \({\mathcal {O}}(B^2)\), we are led to the linear equations
uniquely determined by the condition \({\mathcal {Q}}(\Psi _{ijk}) = 0\), \(i+j+k>1\). Indeed, if there are two solutions \(\Psi _{ijk}\) and \({\tilde{\Psi }}_{ijk}\), then \(\Psi _{ijk} - {\tilde{\Psi }}_{ijk}\) lies in \({{\,\mathrm{Ker}\,}}{\mathcal {T}}\cap {{\,\mathrm{Ker}\,}}{\mathcal {Q}}\), and hence is zero. The linear equations are solved in Appendix C. This gives
Differentiating \(\Psi \) twice with respect to x and evaluating at \(x=0\) shows equation (14).\(\square \)
When solving the linearized problem \(L[\varphi ^*, \nu ^*]\phi = 0\), we want to take advantage of the assumption that \(\varphi ^* \in {\mathcal {M}}_0^{\nu ^*}\) is a solution of (10) with parameter \(\nu ^*\). Hence, we consider (10) and \(L[\varphi ^*, \nu ^*]\phi = 0\) simultaneously:
where \( \mathbf{T}: (H^3_{-\eta })^2 \rightarrow (H^3_{-\eta })^2\) is an onto Fredholm operator with Fredholm index four given by
and
The modified system is
with the nonlinearity
Since we only cut off in \(\varphi \), the modified linearized equation coincides with the original one, as long as \(\varphi \in {\mathcal {M}}_0^\nu \) is sufficiently small in the \(H^3_{{{\,\mathrm{u}\,}}}\) topology. Hence, all solutions to the linearized equation will be captured. The downside of this scheme is that our previous adaptation of the results in [24] cannot be applied directly. We replace the contraction principle with a fiber contraction principle to achieve the following result; see Appendix B.2.
Theorem 3.2
For (15), there exist a cutoff radius \(\delta \), a neighborhood \({\mathcal {V}}\) of \(0 \in {\mathbb {R}}\), a weight \(\eta ^* \in (0,\pi /2)\), two mappings \(\Psi _1\) and \(\Psi _2\), where
with the center manifold
as its graph, and at each fixed element \(\varphi \in \mathbf{M}_{0,1}^\nu \) uniquely determined by (A, B),
with graph
The following statements hold.
-
(i)
\(\mathbf{M}_{0,1}^\nu \) coincides with \({\mathcal {M}}_0^\nu \) in Theorem 3.1 and all statements in this theorem hold for \(\mathbf{M}_{0,1}^\nu \);
-
(ii)
\(\Psi _2[A, B, \nu ] = {{{\,\mathrm{D}\,}}}_{(A, B)}\Psi _1(A, B, \nu )\), so \(\Psi _2[A, B, \nu ]\) is a bounded linear operator from \({{\,\mathrm{Ker}\,}}{\mathcal {T}}\) to \({{\,\mathrm{Ker}\,}}{\mathcal {Q}}\). Also, \(\Psi _2\) is \({\mathscr {C}}^{k-1}\) in \((A, B, \nu )\). Suppose that \(\varphi ^* \in \mathbf{M}^{\nu ^*}_{0,1}\) is sufficiently small in the \(H^3_{{{\,\mathrm{u}\,}}}\) norm, so that \(\varphi ^*\) is a solution of (10) with parameter \(\nu ^*\), uniquely determined by \((A^*, B^*)\). Then,
-
(iii)
\(\mathbf{M}_{0, 2}[A^*, B^*, \nu ^*]\) consists precisely of solutions \(\phi \in H^3_{-\eta ^*}\) of the linearized equation \({\mathcal {T}}\phi + {{{\,\mathrm{D}\,}}}_\varphi {\mathcal {N}}(\varphi ^*, \nu ^*) \phi = 0\);
-
(iv)
every \(\phi \in \mathbf{M}_{0,2}[A^*, B^*, \nu ^*]\) is a solution of
$$\begin{aligned} \phi ''(x) = g(\varphi ^*(x), (\varphi ^*)'(x), \phi (x), \phi '(x), \nu ^*), \end{aligned}$$where
$$\begin{aligned} g(A^*, B^*, C, D, \nu ^*) = {{{\,\mathrm{D}\,}}_A}f(A^*, B^*, \nu ^*) C + {{{\,\mathrm{D}\,}}_B}f(A^*, B^*, \nu ^*) D, \end{aligned}$$and \(f(A, B, \nu ) = \Psi _1''(A, B, \nu )(0)\). Conversely, any solution of the above second-order ODE is an element in \(\mathbf{M}_{0,2}[A^*, B^*, \nu ^*]\). The Taylor expansion of g gives
$$\begin{aligned} \begin{aligned} \phi ''&= -12\varphi ^* \phi + \frac{38}{5} (\varphi ^*)'\phi ' + 6 \nu ^* \phi \\&\quad \quad + {\mathcal {O}}((|\varphi ^*\phi | + |(\varphi ^*)'\phi '|)((\nu ^*)^2 + |\varphi ^*|+|(\varphi ^*)'|). \end{aligned} \end{aligned}$$(16)
Proof
Theorem B.6 applies and gives (i)–(iv). The cutoff radii \(\delta \) given by Theorem 3.1 and Theorem 3.2 are not necessarily the same, but the smallest one can be chosen to have (i). Arguing along the same lines as the proof of Theorem 3.1 gives equation (iv) and differentiating the Taylor expansion of f in (14) gives Eq. (16). \(\square \)
3.2 Local bifurcation curve
The center manifold theorem states that a solution \(\varphi \) sufficiently small in the \(H^3_{{{\,\mathrm{u}\,}}}\) norm solves the reduced ODE (14), which is local in nature and allows spatial dynamics tools. Let \(\varphi = P\), \(\varphi ' = Q\) and regard the spatial variable x as “time” t. Equation (14) defines the following system of ODEs
which is reversible by Theorem 3.1(vi). We aim to rescale (17) into a KdV-equation when \(\nu = 0\), that is
Hence, we set
Differentiating, substituting into (17) and identifying coefficients yield
which are satisfied by
The resulting rescaled system is
For \(\nu = 0\), (18) is the KdV-equation with the explicitly known pair of solutions
which corresponds to a symmetric and homoclinic orbit. For \(\nu > 0\), the symmetric homoclinic orbit persists by the same argument as in [26], p. 955. Undoing the rescaling and switching back to \(P = \varphi \) as well as \(Q = \varphi '\) give
for \(\nu > 0\). The supercritical solitary-wave solution \(\varphi \) is exponentially decaying, so both \(\varphi \) and \(\varphi '\) belong to \(H^3 \subset H^3_{{{\,\mathrm{u}\,}}}\). Also, they depend continuously on the parameter \(\nu \). We denote this solution as \(\varphi ^*_{\nu ^*}\) with parameter \(\nu ^*\) and define
for some \(\nu ' > 0\). The main result of this section is reached.
Theorem 3.3
There exists a neighborhood of \((\varphi , \nu ) = (0,0)\) in \(H^3_{{{\,\mathrm{u}\,}}} \times (0, \infty )\), for which \({\mathcal {C}}_{loc}\) is the unique \(\nu \)-dependent family of non-trivial even small-amplitude solitary solutions to (10) emanating from (0, 0). We refer to \({\mathcal {C}}_{loc}\) as the local bifurcation curve.
Proof
The function \(\varphi ^*_{\nu ^*}\) belongs to \({\mathcal {M}}_0^{\nu ^*}\) by the one-to-one correspondence between (17) and \({\mathcal {M}}^{\nu ^*}_0\) in Theorem 3.1(v). From (19) combined with the fact that \(\varphi ^*_{\nu ^*}\) is exponentially decaying, we have \(\Vert \varphi ^*_{\nu ^*}\Vert _{H^1_{{{\,\mathrm{u}\,}}}} \lesssim \nu ^*\). Since the reduced vector field f in (13) is superlinear in \(\varphi ^*_{\nu ^*}(x)\) and \((\varphi ^*_{\nu ^*})'(x)\) by Theorem 3.1(ii), the bound by \(\nu ^*\) in (19) is carried over to \((\varphi ^*_{\nu ^*})''\). Differentiating (13) gives
where \({{{\,\mathrm{D}\,}}}_1 f\) and \({{{\,\mathrm{D}\,}}}_2 f\) are bounded in view of Theorem 3.1(i). Hence, \((\varphi ^*_{\nu ^*})^{(3)}\) is also bounded by \(\nu ^*\). We obtain the improvement \(\Vert \varphi ^*_{\nu ^*}\Vert _{H^3_{{{\,\mathrm{u}\,}}}} \lesssim \nu ^*\) and then by choosing \(\nu ^*\) sufficiently small, \(\varphi ^*_{\nu ^*}\) is indeed a solution of (10) according to Theorem 3.1(iv). The existence of \({\mathcal {C}}_{loc}\) in \(H^3_{even}\) is now established since \(\varphi ^*_{\nu ^*} \in H^3\) is an even function.
Our argument for the uniqueness of \({\mathcal {C}}_{loc}\) is similar to the one in [11], Lemma 5.10. Suppose that \((\varphi ,\nu )\) is a non-trivial even solitary wave solution which is small enough in \(H^3_{{{\,\mathrm{u}\,}}} \times (0,\infty )\) that \(\varphi \) lies on the center manifold \({\mathcal {M}}^\nu _0\). Then \((P,Q)=(\varphi ,\varphi ')\) is a reversible homoclinic solution of the ODE (17), whose phase portrait is qualitatively the same as in Fig. 3. The homoclinic orbit in the right half plane corresponds to the case \(\varphi =\varphi _\nu \) and hence \((\varphi ,\nu ) \in {\mathcal {C}}_{loc}\). Any other solution must therefore approach the origin along the portions of its stable and unstable manifolds lying in the left half plane. But this would force \(P(t)=\varphi (t) < 0\) for sufficiently large |t|, contradicting (i) in Proposition 2.1. \(\square \)

Phase portrait for (18) when \(\nu =0\). The homoclinic orbit persists for \(\nu > 0\)
Remark 3.4
Since the amplitude of \(\varphi ^*_{\nu ^*}\) is \({\mathcal {O}}(\nu ^*)\) as \(\nu ^* \rightarrow 0\), we can find a \(\nu ' > 0\), such that
From Proposition 2.1, the solutions \(\varphi ^*_{\nu ^*}\) are everywhere smooth and strictly decreasing on \((0, \infty )\).
3.3 Invertibility of \(L[\varphi ^*, \nu ^*]\)
Let \(\varphi ^*:=\varphi ^*_{\nu ^*} \in {\mathcal {C}}_{loc}\) and the corresponding parameter \(\nu ^*\) be fixed. The linear operator \(L[\varphi ^*, \nu ^*]\) is the linearization of the left-hand side of (10) with respect to the \(\varphi \)-component. Note that \(L[\varphi ^*, \nu ^*]:H^3_{even} \rightarrow H^3_{even}\) is Fredholm with Fredholm index zero. Hence, we only need to show that the nullspace of \(L[\varphi ^*, \nu ^*]\) is trivial. The invertibility of \(L[\varphi ^*, \nu ^*]\) has already been shown in [31]. In this section, we showcase an alternative approach exploiting Theorem 3.2 and are able to make quantitative statements for elements in the nullspace of \(L[\varphi ^*, \nu ^*]\) in \(H^3_{-\eta ^*}\), where \(\eta ^*\) is as in Theorem 3.2. This approach is inspired by Lemmas 4.14 and 4.15 in [32].
Proposition 3.5
The nullspace \({{\,\mathrm{Ker}\,}}L\) of \(L[\varphi ^*, \nu ^*]:H^3_{-\eta ^*} \rightarrow H^3_{-\eta ^*}\) is two-dimensional, spanned by the exponentially decaying function \((\varphi ^*)'\) and an exponentially growing function. Seeing that \((\varphi ^*)'\) is odd, \({{\,\mathrm{Ker}\,}}L\) restricted on \(H^3_{even}\) is trivial and \(L[\varphi ^*, \nu ^*]\) is thus invertible in \(H^3_{even}\).
Proof
We use Theorem 3.2(iv), that is, elements \(\phi \in {{\,\mathrm{Ker}\,}}L \subset H^3_{-\eta ^*}\) have a one-to-one correspondence to the solutions of (16). Letting \(\phi = U\), \(\phi ' = V\) and regarding x as a time variable t, we cast (16) into a system
This can be considered as a perturbation problem of the form
where \(\textbf{u}:{\mathbb {R}}^2 \rightarrow {\mathbb {R}}^2\), \(M \in {\mathbb {R}}^{2\times 2}\) is a matrix with constant coefficients and \(R :{\mathbb {R}}\rightarrow {\mathbb {R}}^2\) is an integrable remainder term. In this case,
so the eigenvalues for M are \(\sqrt{6\nu ^*}\) and \(-\sqrt{6\nu ^*}\). Moreover, the exponential decay of \(\varphi ^*\) and \((\varphi ^*)'\) guarantees the integrability condition; see the discussion after (19). Applying for example Problem 29, Chapter 3 in [13], as well as switching back to \(\phi \) and \(\phi '\), the statements concerning \({{\,\mathrm{Ker}\,}}L\) are immediate. In particular, \({{\,\mathrm{Ker}\,}}L\) is spanned by a function \(\phi _1\) behaving as \(\exp (t\sqrt{6\nu ^*})\) and \(\phi _2\) behaving as \(\exp (-t\sqrt{6\nu ^*})\) as \(t \rightarrow \infty \). It is a straightforward calculation to show that one exponentially decaying function in \({{\,\mathrm{Ker}\,}}L\) is \((\varphi ^*)'\), which is an odd function. Since even functions in \(H^3\) cannot be written as linear combinations of an odd exponentially decaying function and an exponentially growing function, \({{\,\mathrm{Ker}\,}}L\) is trivial in \(H^3_{even}\). \(\square \)
4 Global bifurcation
We use a global bifurcation theorem from [11] in a slightly modified form because the open set in our case is not a product set; see Appendix D. For (1), we take
and
Since \(H^3 \subset BUC^2\), the supremum norm is controlled by the \(H^3\) norm and \({\mathcal {U}}\) is thus an open set in \(H^3_{even} \times {\mathbb {R}}\). We aim to use Theorem D.1. Proposition 2.10 verifies Hypothesis (A) in this theorem, while Sect. 3.2 and Proposition 3.5 together verify Hypothesis (B). Here, the local curve \({\mathcal {C}}_{loc}\) bifurcates from \((0, 0) \in \partial {\mathcal {U}}\). We have thus the following global bifurcation theorem for (1) in \(H^3_{even}\) and \({\mathcal {U}}\).
Theorem 4.1
The local bifurcation curve \({\mathcal {C}}_{loc}\) in Section 3.2 is contained in a curve of solutions \({\mathcal {C}}\), which is parametrized as
for some continuous map \((0,\infty ) \ni s \mapsto (\varphi _s, \nu _s)\). We have
-
(a)
One of the following alternatives holds:
-
(i)
(blowup) as \(s \rightarrow \infty \),
$$\begin{aligned}M(s) :=\Vert \varphi _s\Vert _{H^3} + \nu _s + \frac{1}{{{\,\mathrm{dist}\,}}((\varphi _s, \nu _s), \partial {\mathcal {U}})} \rightarrow \infty ;\end{aligned}$$ -
(ii)
(loss of compactness) there exists a sequence \(s_n \rightarrow \infty \) as \(n \rightarrow \infty \) such that \(\sup _n M(s_n) < \infty \) but \((\varphi _{s_n})_n\) has no subsequence convergent in \({\mathcal {X}}\).
-
(i)
-
(b)
Near each point \((\varphi _{s_0}, \nu _{s_0}) \in {\mathcal {C}}\), we can reparametrize \({\mathcal {C}}\) so that \(s \mapsto (\varphi _s, \nu _s)\) is real analytic.
-
(c)
\((\varphi _s, \nu _s) \notin {\mathcal {C}}_{loc}\) for s sufficiently large.
In this section, we use the integral identity in Proposition 2.2 to exclude the loss of compactness scenario. An alternative route is to employ the Hamiltonian structures for nonlocal problems in [7]. Even though the Whitham kernel does not fit into this framework, a direct differentiation confirms that equation 43 in [7] indeed gives a Hamiltonian for the Whitham equation. We also study how M(s) blows up as \(s \rightarrow \infty \).
4.1 Preservation of nodal structure
We begin by showing that the nodal structure is preserved along the global bifurcation curve.
Theorem 4.2
If \((\varphi , \nu ) \in {\mathcal {C}}\subset {\mathcal {U}}\), then \(\varphi \) is smooth on \({\mathbb {R}}\) and strictly decreasing on the interval \((0, \infty )\).
Proof
The property \(\sup _{x\in {\mathbb {R}}} \varphi (x) < (1+\nu )/2\) for \((\varphi , \nu )\in {\mathcal {U}}\) implies smoothness on \({\mathbb {R}}\) by Proposition 2.1(iv). Because in addition \(\varphi \in H^3_{even}\) is a solitary-wave solution with parameter \(\nu > 0\), we have that \(\varphi \) is non-increasing by Proposition 2.1(iii). In order to apply Proposition 2.1(v) to conclude that \(\varphi \) is strictly decreasing on \((0, \infty )\) we only need to establish that \(\varphi \) is non-constant.
The only constant solutions are 0 and \(\nu > 0\) and the latter is excluded by the fact that \(\varphi \in H^3\) is a solitary-wave solution. To show that \(\varphi (x)\not \equiv 0\), note that the linearization \(L[0, \nu ]:\phi \mapsto (1+\nu )\phi - K*\phi \) on \(H^3_{even}\) is Fredholm of index zero for all \(\nu \in {\mathcal {I}}\) by Proposition 2.10 and \({{\,\mathrm{Ker}\,}}L[0, \nu ]\) is trivial. So, \(L[0, \nu ]\) is invertible. The implicit function theorem applies and prevents \({\mathcal {C}}\) from intersecting the trivial solution line. Hence, this alternative cannot occur. \(\square \)
4.2 Compactness of the global curve \({\mathcal {C}}\)
The following result rules out alternative (ii) in Theorem 4.1(a).
Theorem 4.3
Every sequence \((\varphi _n, \nu _n)_{n=1}^\infty \,\, :=(\varphi _{s_n}, \nu _{s_n})_{n=1}^\infty \subset {\mathcal {C}}\) satisfying
has a convergent subsequence in \(H^3_{even} \times (0, \infty )\).
Proof
Proposition 2.3 gives a locally uniform limit \(\varphi \) for a subsequence of functions \(\varphi _n\). The idea is to use Proposition 2.5 to show that \(\varphi _n\) converges to \(\varphi \) in \(H^3\). We observe that the assumption \(\sup _n M(s_n) < \infty \) implies
where \(\nu _n = c_n-1\). Also, according to Corollary 2.4, \(\varphi \) inherits non-negativity, continuity, evenness, boundedness and monotonicity from \(\varphi _n\). More precisely, we have shown in Theorem 4.2 that \(\varphi _n\) is strictly decreasing on \((0, \infty )\). So, \(\varphi \) is at least non-increasing on \((0,\infty )\).
First, we verify that \(\varphi _n \rightarrow \varphi \) uniformly. Because the sequence of functions \(\varphi _n\) is uniformly bounded in \(H^3\), it has a weak limit which coincides with the locally uniform limit \(\varphi \). So \(\varphi \in H^3\). Since \(\varphi \) is in addition monotone on the real half-lines, we have \(\lim _{|x|\rightarrow \infty } \varphi (x) = 0\). Corollary 2.4(ii) now confirms the desired uniform convergence of \(\varphi _n\) to \(\varphi \).
Next, for the \(L^2\) convergence, we use the integral identity in Proposition 2.2. For each n, \(\varphi _n \in BUC^2\) and \(\lim _{|x|\rightarrow \infty } \varphi _n(x) = 0\). Hence,
Also, since \(\nu _n > 0\), the solitary-wave solution \(\varphi _n\) has exponential decay according to Proposition 2.1(ii) and we are allowed to write
Since \(\sup _n \Vert \varphi _n\Vert _{H^3} < \infty \), the \(L^2\) integral on the left-hand side is uniformly bounded in n. Because \(\inf _n \nu _n > 0\), the \(L^1\) integral on the right-hand side is uniformly bounded as well. Taking into account that \(\lim _{|x|\rightarrow \infty } \varphi _n(x) = 0\) uniformly in n, we obtain
As \(n \rightarrow \infty \), we have \(\int _{|x|<R_\epsilon } \varphi _n^2 \, \mathop {}\!\mathrm {d}x \rightarrow \int _{|x|<R_\epsilon } \varphi ^2 \, \mathop {}\!\mathrm {d}x\). Letting \(\epsilon \rightarrow 0\) confirms that \(\varphi _n \rightarrow \varphi \) in \(L^2\).
Finally, we observe that \(\sup _n M(s_n) < \infty \) also implies
All prerequisites of Proposition 2.5 are now checked and we have \(\varphi _n \rightarrow \varphi \) in \(H^3\). \(\square \)
4.3 Analysis of the blowup
Having excluded the loss of compactness alternative, we examine the blowup alternative
where \((\varphi _s, \nu _s) \in {\mathcal {C}}\). In this case, for any sequence \(s_n\rightarrow \infty \) we can extract a subsequence (also denoted \(\{s_n\}\)) for which at least one of the following four possibilities holds:
-
(P1)
\(\Vert \varphi _{s_n}\Vert _{H^3} \rightarrow \infty \),
-
(P2)
\(\nu _{s_n} \rightarrow \infty \),
-
(P3)
\(\nu _{s_n} \rightarrow 0\),
-
(P4)
\((1+\nu _{s_n})/2 - \sup _{x\in {\mathbb {R}}} \varphi _{s_n}(x) \rightarrow 0\),
where (P3) and (P4) belong to the case when \({{\,\mathrm{dist}\,}}((\varphi _{s_n}, \nu _{s_n}), \partial {\mathcal {U}}) \rightarrow 0\).
Theorem 4.4
The alternatives (P2) and (P3) cannot occur.
Proof
Alternative (P2) cannot occur since the definition of \({\mathcal {U}}\) and Proposition 2.1(viii) imply that \(\nu _{s_n} \le 1\).
To exclude alternative (P3), we assume \(\nu _{s_n} \rightarrow 0\) as \(n \rightarrow \infty \). Any locally uniform limit \((\varphi , 0)\) solves (1). Moreover, \(\varphi \) is bounded, continuous, and monotone; see Proposition 2.3. Proposition 2.2 gives
Because \(\varphi \) is non-negative, we must have \(\varphi \equiv 0\). In particular, \(\lim _{|x|\rightarrow \infty } \varphi (x) = 0\). In virtue of Corollary 2.4(ii), \(\varphi _{s_n} \rightarrow 0\) uniformly and now according to Remark 2.6, \(\varphi _{s_n} \rightarrow 0\) in \(C^k\) for any k, which implies that \(\varphi _{s_n} \rightarrow \varphi \) in \(H^3_{-\eta }\) for all \(\eta > 0\) and that \((\varphi _{s_n}, \nu _{s_n})\) reenters any small neighborhood of (0, 0) in \(H^3_{{{\,\mathrm{u}\,}}} \times (0,\infty )\). This cannot happen in light of Theorem 4.1(c) and the uniqueness of \({\mathcal {C}}_{loc}\) given by Theorem 3.3.
\(\square \)
Next, we show a useful characterization for when the \(H^3\) norm stays bounded.
Lemma 4.5
By possibly taking a subsequence of \((\varphi _{s_n}, \nu _{s_n})_{n=1}^\infty \), we have \(\nu _{s_n} \rightarrow \nu > 0\) and \(\varphi _{s_n} \rightarrow \varphi \) locally uniformly as \(n\rightarrow \infty \). Then, \(\inf _n \nu _{s_n} > 0\). Moreover,
Proof
The existence of such a subsequence is given by Proposition 2.3. Since Theorem 4.4 has excluded (P3), we must have \(\nu _{s_n} \rightarrow \nu > 0\), which also implies that \(\inf _n \nu _{s_n} > 0\). We focus on proving the last statement. The proof of Theorem 4.3 already gives that \(\sup _n \Vert \varphi _{s_n}\Vert _{H^3} < \infty \) implies \(\varphi \in H^3\), thus \(\sup _{x\in {\mathbb {R}}} \varphi (x) < (1+\nu )/2\) by Proposition 2.1(v) and \(\lim _{|x|\rightarrow \infty } \varphi (x) = 0\). Conversely, assume on the contrary that there is a subsequence of functions \(\varphi _{s_n}\) such that \(\Vert \varphi _{s_n}\Vert _{H^3} \rightarrow \infty \) as \(n \rightarrow \infty \), yet its locally uniform limit \(\varphi \) satisfies \(\sup _{x\in {\mathbb {R}}}\varphi (x) < (1+\nu )/2\) and \(\lim _{|x|\rightarrow \infty } \varphi (x)=0\). Then, \(\varphi \) is smooth by (iv) in Proposition 2.1. Also, Corollary 2.4(ii) gives \(\varphi _{s_n} \rightarrow \varphi \) uniformly, so \(\varphi _{s_n}(x) \rightarrow 0\) as \(|x|\rightarrow \infty \) uniformly in n. Similar to the proof of Theorem 4.3, we get
where \(\epsilon \) and \(R_\epsilon \) are independent of n. Rearranging gives
where \(\sup _{x\in {\mathbb {R}}}\varphi _{s_n}^2(x) < 1\) because \(\nu _{s_n} \in (0,1]\). Recall that \(\inf _{n} \nu _{s_n} > 0\). Choosing \(\epsilon = \inf _n \nu _{s_n}/2\), this shows \(\sup _n\Vert \varphi _{s_n}\Vert _{L^1} < \infty \). It follows that the sequence of functions \(\varphi _{s_n}\) is uniformly bounded in \(L^2\) and arguing as in the proof of Proposition 2.5 gives the uniform boundedness in \(H^3\), which is a contradiction to the assumption. \(\square \)
We can now establish the following equivalence.
Theorem 4.6
(P4) and (P1) are equivalent.
Proof
Let \((\varphi _{s_n}, \nu _{s_n})_{n=1}^\infty \) be a sequence satisfying (P4). By possibly taking a subsequence, Proposition 2.3 gives that \(\varphi _{s_n} \rightarrow \varphi \) locally uniformly and \(\nu _{s_n} \rightarrow \nu \), where \(\nu > 0\) as we have excluded (P3). Since each \(\varphi _{s_n}\) is even and strictly decreasing, (P4) is the same as
which is equivalent to
By Lemma 4.5, this implies (P1). For the other implication, let \((\varphi _{s_n}, \nu _{s_n})_{n=1}^\infty \) be a sequence satisfying (P1). We also have that \(\varphi _{s_n} \rightarrow \varphi \) locally uniformly and \(\nu _{s_n} \rightarrow \nu > 0\). Once again by Proposition 2.3 and Corollary 2.4, \(\varphi \) solves (1) with parameter \(\nu >0\) and is continuous, bounded, even, and \(\varphi \) is non-increasing on \((0, \infty )\). Then, the limit \(\lim _{|x|\rightarrow \infty } \varphi (x)\) exists. According to Corollary 2.4(i), this can take the value
In addition, Proposition 2.2 says
The combinations (aC) and (bB) are quickly excluded. If \(\varphi \equiv 0\), then \(\sup _{x\in {\mathbb {R}}} \varphi (x) < (1+\nu )/2\) and Lemma 4.5 gives that \(\sup _n \Vert \varphi _{s_n}\Vert _{H^3} < \infty \), which contradicts the blowup alternative. This rules out (aB). The fact that \(\varphi \) is non-increasing on \((0,\infty )\) rules out (bA). Assume (bC), which is just (C). Then, we arrive at a contradiction as follows. Consider the sequence of translated solutions \(\tau _{x_n}\varphi _{s_n}=\varphi _{s_n}(\, \cdot \, + x_n)\), where each \(x_n\) is chosen in such a way that
Such a number \({\tilde{\nu }}\) exists because \(\nu _{s_n} > 0\) cannot limit to 0. Moreover, \(\lim _{n\rightarrow \infty } x_n = \infty \), or we cannot have \(\varphi \equiv \nu > 0\) for every x while each \(\varphi _n\) has exponential decay. Corollary 2.4(iii) applied to \((\tau _{x_n}\varphi _{s_n})_n\) gives a bounded, continuous and non-increasing locally uniform limit \({\tilde{\varphi }}\). The function \({\tilde{\varphi }}\) is a solution to (10) with parameter \(\nu \). Its limits \({\tilde{\varphi }}(x)\) as \(x\rightarrow \pm \infty \) are guaranteed to exist and these can take the value zero or \(\nu > 0\). By construction,
which implies
On the other hand, this also shows that \({\tilde{\varphi }}\) is not a constant function, implying
which is a contradiction. We conclude that (C) cannot occur. Hence, we must have
where the first condition is the same as (P4). Applying Lemma 4.5 gives the desired implication. \(\square \)
Remark 4.7
This in fact implies that \({\mathcal {C}}\) satisfies \(\Vert \varphi _{s}\Vert _{H^3} \rightarrow \infty \) and \((1+\nu _{s})/2 - \sup _{x\in {\mathbb {R}}} \varphi _{s}(x) \rightarrow 0\) as \(s\rightarrow \infty \), without the need for considering subsequences.
Finally, since (P1) and (P4) are equivalent, (P2) and (P3) cannot happen and the blowup alternative must take place, we must have a sequence \((\varphi _{s_n}, \nu _{s_n})_{n=1}^\infty \subset {\mathcal {C}}\) such that \(\lim _{n\rightarrow \infty }\Vert \varphi _{s_n}\Vert _{H^3} = \infty \) and \(\lim _{n\rightarrow \infty }\nu _{s_n} = \nu > 0\). By taking the limit of a subsequence, an extreme solitary-wave solution \(\varphi \) attaining the highest possible amplitude \((1+\nu )/2\) is found; see Fig. 1.
Theorem 4.8
There exists a sequence of elements \((\varphi _{s_n}, \nu _{s_n})\in {\mathcal {C}}\), such that
The sequence of solutions \(\varphi _{s_n}\) has a locally uniform limit \(\varphi \). We have
-
(i)
\(\varphi \) is continuous, bounded, even and non-increasing on the positive real half-line;
-
(ii)
\(\varphi \) is a non-trivial solitary-wave solution to (10) with parameter \(\nu > 0\);
-
(iii)
\(\varphi (0) = (1+\nu )/2\) and more precisely
$$\begin{aligned} C_1|x|^{\frac{1}{2}} \le \frac{1+\nu }{2} - \varphi (x) \le C_2|x|^{\frac{1}{2}}, \end{aligned}$$(21)near the origin and for some constants \(0< C_1<C_2\);
-
(iv)
\(\varphi \) is smooth everywhere except at \(x=0\);
-
(v)
\(\varphi \) has exponential decay.
Proof
Existence has already been shown. According to Proposition 2.3, there is such a locally uniform limit \(\varphi \). Statement (i) is immediate from Corollary 2.4(ii). Statement (ii) follows from the proof of Theorem 4.6, as we have shown that
Statement (iii) is Theorem 4.6 and the estimate (21) for \(\varphi \) near the origin is Proposition 2.1(vi). Together with \(\varphi \) being non-increasing on \((0, \infty )\), we have \(\varphi (x) < (1+\nu )/2\) if \(x \ne 0\). Proposition 2.1(iv) applies and gives statement (iv). Statement (v) follows from Proposition 2.1(ii). \(\square \)
References
Amick, C.J., Fraenkel, L.E., Toland, J.F.: On the Stokes conjecture for the wave of extreme form. Acta Math. 148, 193–214 (1982)
Amick, C.J., Toland, J.F.: On periodic water-waves and their convergence to solitary waves in the long-wave limit. Philos. Trans. Roy. Soc. Lond. Ser. A 303, 633–669 (1981)
Amick, C.J., Toland, J.F.: On solitary water-waves of finite amplitude. Arch. Ration. Mech. Anal. 76, 9–95 (1981)
Arnesen, M.N.: Existence of solitary-wave solutions to nonlocal equations. Discrete Cont. Dyn. Syst. 36, 3483–3510 (2016)
Arnesen, M.N., Decay and symmetry of solitary waves, J. Math Anal. Appl. (2021). https://doi.org/10.1016/j.jmaa.2021.125450
Bahouri, H., Chemin, J.-Y., Danchin, R.: Fourier Analysis and Nonlinear Partial Differential Equations, Grundlehren der Mathematischen Wissenschaften, vol. 343. Springer, Heidelberg (2011)
Bakker, B., Scheel, A.: Spatial Hamiltonian identities for nonlocally coupled systems. Forum Math. Sigma 6, e22 (2018)
Bates, P.W., Fife, P.C., Ren, X., Wang, X.: Traveling waves in a convolution model for phase transitions. Arch. Ration. Mech. Anal. 138, 105–136 (1997)
Bruell, G., Ehrnström, M., Pei, L.: Symmetry and decay of traveling wave solutions to the Whitham equation. J. Differ. Equ. 262, 4232–4254 (2017)
Buffoni, B., Toland, J.: Analytic Theory of Global Bifurcation: An Introduction. Princeton Series in Applied Mathematics, Princeton University Press, Princeton, NJ (2003)
Chen, R.M., Walsh, S., Wheeler, M.H.: Existence and qualitative theory for stratified solitary water waves. Ann. Inst. H. Poincaré Anal. Non Linéaire 35, 517–576 (2018)
Chicone, C.: Ordinary Differential Equations with Applications. Texts in Applied Mathematics, vol. 34. Springer, New York (2006)
Coddington, E.A., Levinson, N.: Theory of Ordinary Differential Equations. McGraw-Hill Book Company Inc, New York, Toronto, London (1955)
Constantin, A., Strauss, W., Varvaruca, E.: Global bifurcation of steady gravity water waves with critical layers. Acta Math. 217, 195–262 (2016)
Dancer, E.N.: Bifurcation theory for analytic operators. Proc. Lond. Math. Soc. 26, 359–384 (1973)
Dancer, E.N.: Global structure of the solutions of non-linear real analytic eigenvalue problems. Proc. Lond. Math. Soc. 27, 747–765 (1973)
Dyachenko, S.A., Hur, V.M.: Stokes waves with constant vorticity: folds, gaps and fluid bubbles. J. Fluid Mech. 878, 502–521 (2019)
Dyachenko, S.A., Hur, V.M.: Stokes waves with constant vorticity: I. Numerical computation. Stud. Appl. Math. 142, 162–189 (2019)
Ehrnström, M., Groves, M.D., Wahlén, E.: On the existence and stability of solitary-wave solutions to a class of evolution equations of Whitham type. Nonlinearity 25, 2903–2936 (2012)
Ehrnström, M., Johnson, M.A., Claassen, K.M.: Existence of a highest wave in a fully dispersive two-way shallow water model. Arch. Ration. Mech. Anal. 231, 1635–1673 (2019)
Ehrnström, M., Kalisch, H.: Traveling waves for the Whitham equation. Differ. Int. Equ. 22, 1193–1210 (2009)
Ehrnström, M., Wahlén, E.: On Whitham’s conjecture of a highest cusped wave for a nonlocal dispersive equation. Ann. Inst. H. Poincaré. Anal. Non Linéaire 36, 1603–1637 (2019)
Encisco, A., Goméz-Serrano, J., Vergara, B.: Convexity of Whitham’s Highest Cusped Wave (2019). Preprint arXiv.1810.10935
Faye, G., Scheel, A.: Center manifolds without a phase space. Trans. Am. Math. Soc. 370, 5843–5885 (2018)
Faye, G., Scheel, A.: Corrigendum to Center Manifolds Without a Phase Space (2020). Preprint arXiv.2007.14260
Groves, M.D., Wahlén, E.: Spatial dynamics methods for solitary gravity-capillary water waves with an arbitrary distribution of vorticity. SIAM J. Math. Anal. 39, 932–964 (2007)
Grušin, V.V.: Pseudodifferential operators in Rn with bounded symbols. Funk. Anal. Priložen 4, 37–50 (1970)
Haziot, S.V.: Stratified large-amplitude steady periodic water waves with critical layers. Commun. Math. Phys. 381, 765–797 (2021)
Hörmander, L.: Lectures on Nonlinear Hyperbolic Differential Equations, Mathématiques & Applications, vol. 26. Springer-Verlag, Berlin (1997)
Pei, L.: Exponential decay and symmetry of solitary waves to Degasperis-Procesi equation. J. Diff. Equ. 269, 7730–7749 (2020)
Stefanov, A., Wright, J.D.: Small amplitude traveling waves in the full-dispersion whitham equation. J. Dyn. Diff. Equ. 32, 85–99 (2020)
Wheeler, M.H.: Large-amplitude solitary water waves with vorticity. SIAM J. Math. Anal. 45, 2937–2994 (2013)
Whitham, G.B.: Variational Methods and Applications to Water Waves, Hyperbolic Equations and Waves (Rencontres, Battelle Res. Inst., Seattle, Wash., 1968) (1970) pp. 153–172
Acknowledgements
This research is supported by the Swedish Research Council, grant no. 2016-04999. Part of it was carried out during the workshop Nonlinear water waves—an interdisciplinary interface in 2017 at Erwin Schrödinger International Institute for Mathematics and Physics. The hospitality and support of the institute is gratefully acknowledged. We also thank Grégory Faye and Arnd Scheel for the swift and helpful correspondence during the finishing phase of this project. Finally, we thank the referee for helpful comments.
Funding
Open access funding provided by Lund University.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Y. Giga.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix
Fredholmness of pseudodifferential operators
Let \(x^* = (x_0, x) \in {\mathbb {R}}^2\) and
Similarly, let \(\xi ^* = (\xi _0, \xi ) \in {\mathbb {R}}^2\) and
We define
and denote the relative closure of \({\mathbb {S}}\) in \(X^* \times E^*\) by \({\overline{{\mathbb {S}}}}\) and the boundary of \({\overline{{\mathbb {S}}}}\) by \(\Gamma \).
Let \({\mathcal {A}}\) be the class of functions \(A(x^*, \xi ^*) \in C^\infty (X^* \times E^*)\) such that A is positively homogeneous of degree 0 in \(x^*\) and \(\xi ^*\), that is,
Clearly, each \(A \in {\mathcal {A}}\) is uniquely determined by its values on \({\mathbb {S}}\). Conversely, each function \({\tilde{A}} \in C^\infty ({\overline{{\mathbb {S}}}})\) can be uniquely homogeneously extended to \(X^* \times E^*\). So, \({\mathcal {A}} \cong C^\infty ({\overline{{\mathbb {S}}}})\). By \(S^0_{\mathcal {A}}\), we denote the set of symbols \(p_A(x, \xi )\) which are given by
for some \(A \in {\mathcal {A}}\). For \(p_A \in S^0_{\mathcal {A}}\), we have the following result, which combines Theorems 4.1 and 4.2 in [27].
Proposition A.1
Let \(j\in {\mathbb {R}}\). If \(p_A(x, \xi ) \in S^0_{\mathcal {A}}\) and \(A(x^*, \xi ^*) \ne 0\) on \(\Gamma \), then
is Fredholm with Fredholm index
where \(\mathrm {arg}A(x^*, \xi ^*)|_\Gamma \) is the increase in the argument of \(A(x^*, \xi ^*)\) around \(\Gamma \) as \(\Gamma \) is traversed with the counter-clockwise orientation.
We comment that a version of Proposition A.1 is available for matrix-valued symbols \(p_A(x, \xi )\); see [27, Sect. 4].
Center manifold theorems
1.1 A nonlocal version of the center manifold theorem
Nonlocal nonlinear parameter-dependent problems of the form
where
are considered in the weighted Sobolev spaces \(H^j_{-\eta }({\mathbb {R}}^n)\) for some \(\eta > 0\), positive integers n and \(j = 1\). The following presentation focuses on dimension \(n=1\) and arbitrary regularity \(j \ge 1\). \({\mathcal {T}}\) will be referred to as the linear part and \({\mathcal {N}}\) as the nonlinear part of (22).
To obtain an appropriate modification of Eq. (22), we introduce the space of uniformly local \(H^j\) functions,
Note that the embeddings \(H^j \subset H^j_{{{\,\mathrm{u}\,}}} \subset H^j_{-\eta }\) are continuous for all \(\eta > 0\). Next, let \({\underline{\chi }}:{\mathbb {R}}\rightarrow {\mathbb {R}}\) be a smooth cutoff function satisfying
In addition, let \(\theta :{\mathbb {R}}\rightarrow {\mathbb {R}}\) be a smooth and even function with
so that
We define
and then
The cutoff operator \(\chi :H^j_{-\eta } \rightarrow H^j_{{{\,\mathrm{u}\,}}}\) is well-defined, Lipschitz continuous and \(\Vert \chi (v)\Vert _{H^j_{{{\,\mathrm{u}\,}}}} \le C_0\) for all \(v \in H^j_{-\eta }\). Lemma 2 in [25] proves these claims for \(j=1\) and an asymmetric function \(\theta \) with \(\text {supp} \, \theta \subset [-1/4, 5/4]\). Generalizing to higher regularity \(j\ge 1\) and verifying the results in [25] with our choice of \(\theta \) are straightforward. The scaled cutoff operator \(\chi ^\delta :H^j_{-\eta } \rightarrow H^j_{{{\,\mathrm{u}\,}}}\) naturally inherits these properties, in particular \(\Vert \chi ^\delta (v)\Vert \le C_0 \delta \) for all \(v \in H^j_{-\eta }\). The modification of Eq. (22) is
where
For \(\xi \in {\mathbb {R}}\), \(\tau _\xi v = v(\, \cdot \, + \xi )\) denotes the shift by \(\xi \). Regarded as an operator on \(H^j_{-\eta }\) or \(H^j\), \(\tau _\xi \) is bounded with \(\Vert \tau _\xi \Vert _{H^j_{-\eta }\rightarrow H^j_{-\eta }} \lesssim \exp (\eta \xi )\) and \(\Vert \tau _\xi \Vert _{H^j \rightarrow H^j} = 1\).
Also, we let \({\mathcal {Q}}:H^j_{-\eta } \rightarrow H^j_{-\eta }\) be a bounded projection on the nullspace \({{\,\mathrm{Ker}\,}}\, {\mathcal {T}}\) of \({\mathcal {T}}\) with a continuous extension to \(H^{j-1}_{-\eta }\), such that \({\mathcal {Q}}\) commutes with the inclusion map from \(H^j_{-\eta }\) to \(H^j_{-\eta '}\), for all \(0< \eta ' < \eta \).
Hypothesis B.1
(The linear part \({\mathcal {T}}\))
-
(i)
There exists \(\eta _0 > 0\) such that \({\mathcal {K}}\in L^1_{\eta _0}\).
-
(ii)
The operator
$$\begin{aligned} {\mathcal {T}}:v \mapsto v + {\mathcal {K}}*v, \quad H^j_{-\eta } \rightarrow H^j_{-\eta } \end{aligned}$$is Fredholm for \(\eta \in (0, \eta _0)\), its nullspace \({{\,\mathrm{Ker}\,}}\, {\mathcal {T}}\) is finite-dimensional and
$$\begin{aligned} {{\,\mathrm{ind}\,}}{\mathcal {T}}= \text {dim}\, {{\,\mathrm{Ker}\,}}\, {\mathcal {T}}, \end{aligned}$$where \({{\,\mathrm{ind}\,}}{\mathcal {T}}\) is the Fredholm index of \({\mathcal {T}}\). In other words, \({\mathcal {T}}\) is onto.
Remark B.2
Hypothesis B.1(i) gives boundedness of \({\mathcal {T}}\) on \(H^j_{-\eta }\) for \(\eta \in (0, \eta _0)\); see Sect. 2.4. The original assumption \({\mathcal {K}}\in W^{1,1}_{\eta }\) in [24] is only used to guarantee item (ii). Since the Whitham kernel \(K \notin W^{1,1}_\eta \), we instead require (ii) directly.
Hypothesis B.3
(The nonlinear part \({\mathcal {N}}\)) There exist \(k \ge 2\), a neighborhood \({\mathcal {U}}\) of \(0 \in H^j_{-\eta }\) and \({\mathcal {V}}\) of \(0 \in {\mathbb {R}}\), such that for all sufficiently small \(\delta > 0\), we have
-
(i)
\({\mathcal {N}}^\delta :H^j_{-\eta }\times {\mathcal {V}}\rightarrow H^j_{-\eta }\) is \({\mathscr {C}}^k\). In addition, for all non-negative pairs \((\zeta , \eta )\) satisfying \(0< k\zeta<\eta < \eta _0\), \({{{\,\mathrm{D}\,}}}_v^l{\mathcal {N}}^\delta :(H_{-\zeta }^j)^l \rightarrow H_{-\eta }^j\) is bounded for all \(0< l\zeta \le \eta < \eta _0\) and \(0 \le l \le k\), and Lipschitz continuous in v for \(1 \le l \le k-1\) uniformly in \(\mu \in {\mathcal {V}}\);
-
(ii)
\({\mathcal {N}}^\delta (\tau _\xi v,\mu ) = \tau _\xi {\mathcal {N}}^\delta (v, \mu )\) for all \(\mu \in {\mathcal {V}}\) and \(\xi \in {\mathbb {R}}\);
-
(iii)
\({\mathcal {N}}^\delta (0,0)=0, {{{\,\mathrm{D}\,}}}_v{\mathcal {N}}^\delta (0,0)=0\) and as \(\delta \rightarrow 0\),
$$\begin{aligned} \delta _1(\delta )\,\, :=\text {Lip}_{H^j_{-\eta }\times {\mathcal {V}}} \,{\mathcal {N}}^\delta = {\mathcal {O}}(\delta + |\mu |). \end{aligned}$$
In dimension \(n \ge 1\), a symmetry is a triple \((\rho , \tau _\xi , \kappa ) \in {\textbf {O}}(n) \times ({\mathbb {R}}\times {\textbf {O}}(1))\), where the orthogonal linear transformation \(\rho \in {\mathbf {O}}(n)\) acts on \(v(x) \in {\mathbb {R}}^n\) while \(\tau _\xi \) and \(\kappa \) act on the variable \(x \in {\mathbb {R}}\). In particular, a symmetry \((\rho , \tau _\xi , \kappa )\) is called equivariant if \((\rho , \tau _\xi , \kappa ) \in {\textbf {O}}(n) \times ({\mathbb {R}}\times \{{{\,\textrm{Id}\,}}\})\), and reversible otherwise. Lemma 2 in [25] and the fact that \(\theta \) is even give the invariance of \(\chi ^\delta \) under the whole group \({\textbf {O}}(n) \times ({\mathbb {R}}\times {\textbf {O}}(1))\) for \(n=1\), that is, \(\chi ^\delta (\gamma v) = \gamma \chi ^\delta (v)\) for all \(\gamma \in {\textbf {O}}(1) \times ({\mathbb {R}}\times {\textbf {O}}(1))\).
Hypothesis B.4
(Symmetries) There exists a symmetry group \(S \subset {\textbf {O}}(1) \times ({\mathbb {R}}\times {\textbf {O}}(1))\) which contains all translations on the real line and which commutes with the linear part \({\mathcal {T}}\) as well as the nonlinear part \({\mathcal {N}}\), that is,
We state the equivariant parameter-dependent center manifold theorem. Even though the hypothesis on \({\mathcal {K}}\) is changed, the proof is the same.
Theorem B.5
Assume Hypotheses B.1, B.3 and B.4 are met for equation (22). Then, by possibly shrinking the neighborhood \({\mathcal {V}}\) of \(0\in {\mathbb {R}}\), there exist a cutoff radius \(\delta > 0\), a weight \(\eta ^*\in (0, \eta _0)\) and a map
with the center manifold
as its graph. The following statements hold:
-
(i)
(smoothness) \(\Psi \in {\mathscr {C}}^k\), where k is as in Hypothesis B.3;
-
(ii)
(tangency) \(\Psi (0,0) = 0\) and \({{{\,\mathrm{D}\,}}}_{v_0}\Psi (0,0) = 0;\)
-
(iii)
(global reduction) \({\mathcal {M}}_0^\mu \) consists precisely of functions v such that \(v \in H^j_{-\eta ^*}\) is a solution of the modified equation (23) with parameter \(\mu \);
-
(iv)
(local reduction) any function \(v \in H^j_{{{\,\mathrm{u}\,}}}\) solving (22) with \(\Vert v\Vert _{H^j_{{{\,\mathrm{u}\,}}}} < C_0\delta \) is contained in \({\mathcal {M}}_0^\mu \);
-
(v)
(translation invariance) the shift \(\tau _\xi \) by \(\xi \in {\mathbb {R}}\) acting on \({\mathcal {M}}_0^\mu \) induces a \(\mu \)-dependent flow
$$\begin{aligned} \Phi _\xi :{{\,\mathrm{Ker}\,}}{\mathcal {T}}\rightarrow {{\,\mathrm{Ker}\,}}{\mathcal {T}}\end{aligned}$$through \(\Phi _\xi = {\mathcal {Q}}\circ \tau _\xi \circ ({{\,\mathrm{Id}\,}}+ \Psi )\);
-
(vi)
(reduced vector field) the reduced flow \(\Phi _\xi \) is of class \({\mathscr {C}}^k\) in \(v_0, \mu , \xi \) and is generated by a reduced parameter-dependent vector field f of class \({\mathscr {C}}^{k-1}\) on the finite-dimensional \({{\,\mathrm{Ker}\,}}{\mathcal {T}}\);
-
(vii)
(correspondence) any element \(v = v_0 + \Psi (v_0, \mu )\) of \({\mathcal {M}}_0^\mu \) corresponds one-to-one to a solution of
$$\begin{aligned} \frac{\mathop {}\!\mathrm {d}v_0}{\mathop {}\!\mathrm {d}x} = f(v_0, \mu )\,\, :=\frac{\mathop {}\!\mathrm {d}}{\mathop {}\!\mathrm {d}x} {\mathcal {Q}}(\tau _x v)\Big |_{x=0}. \end{aligned}$$ -
(viii)
(equivariance) \({{\,\mathrm{Ker}\,}}{\mathcal {T}}\) is invariant under S and \({\mathcal {Q}}\) can be chosen to commute with all \(\gamma \in S\). Consequently, \(\Psi \) commutes with \(\gamma \in S\) and \({\mathcal {M}}_0^\mu \) is invariant under S. Finally, the reduced vector field f in item (vi) commutes with all equivariant symmetries and anticommutes with the reversible ones in S.
1.2 Center manifold theorem for an augmented problem
In this section, we prove a center manifold theorem for a system consisting of the nonlocal Eq. (22) and its linearization at \((v, \mu )\), that is,
More precisely, we study
where the linear part is
and the nonlinear part is
We consider the modified system
with
where \({\mathcal {N}}^\delta (v, \mu )\) is defined in the previous section. Observe that we only cut off in v, which allows capturing all solutions of the linearized Eq. (24). This requires yet another adaptation of the center manifold theorem, where the usual contraction principle is replaced with a fiber contraction principle.
Theorem B.6
Assume Hypotheses B.1, B.3, B.4 and let \({\mathcal {Q}}\) be the same projection as in Theorem B.5. For (25), there exist a cutoff radius \(\delta > 0\), a weight \(\eta ^* \in (0, \eta _0)\), a neighborhood \({\mathcal {V}}\) of \(0 \in {\mathbb {R}}\) and two mappings
with the center manifold
as its graph, and at each fixed element \(v = v_0 + \Psi _1(v_0, \mu ) \in \mathbf{M}_{0,1}^\mu \),
with graph
The following statements hold.
-
(i)
\(\mathbf{M}_{0, 2}[v_0,\mu ]\) consists precisely of the solutions to the modified linearized equation \({\mathcal {T}}w + {{{\,\mathrm{D}\,}}}_v {\mathcal {N}}^\delta (v, \mu ) w = 0\) at \(v = v_0 + \Psi _1(v_0, \mu ) \in \mathbf{M}^\mu _{0,1}\) and the problem
$$\begin{aligned} {\mathcal {T}}w + {{{\,\mathrm{D}\,}}}_v {\mathcal {N}}^\delta (v, \mu )w = 0 \text { with } {\mathcal {Q}}w = w_0 \end{aligned}$$has a unique solution for each \(w_0 \in {{\,\mathrm{Ker}\,}}{\mathcal {T}}\).
-
(ii)
\(\mathbf{M}_{0,1}^\mu \) coincides with \({\mathcal {M}}_0^\mu \) in Theorem B.5 and all statements in this theorem hold for \(\mathbf{M}_{0,1}^\mu \). In particular, if \(v = v_0 + \Psi _1(v_0, \mu ) \in \mathbf{M}^{\mu }_{0,1}\) is sufficiently small in the \(H^j_{{{\,\mathrm{u}\,}}}\) norm, so that v solves the original equation (22) with parameter \(\mu \), then \(w \in \mathbf{M}_{0,2}[v_0, \mu ]\) solves the linearized equation (24) at v.
-
(iii)
We have \(\Psi _2[v_0, \mu ] = {{{\,\mathrm{D}\,}}}_{v_0}\Psi _1(v_0, \mu )\). Consequently, \(\Psi _2[v_0, \mu ]\) is a bounded linear map, \(\Psi _2[0,0] = 0\) and \(\Psi _2\) is \({\mathscr {C}}^{k-1}\) in \((v_0, \mu )\).
-
(iv)
The shift \(\tau _\xi \) acting on \(\mathbf{M}_{0, 2}[\, \cdot \,, \mu ]\) induces a flow
$$\begin{aligned} \Phi _{2,\xi }: {{\,\mathrm{Ker}\,}}{\mathcal {T}}\rightarrow {{\,\mathrm{Ker}\,}}{\mathcal {T}}\end{aligned}$$through \(\Phi _{2,\xi } :={\mathcal {Q}}\circ \tau _\xi \circ ({{\,\mathrm{Id}\,}}+ \Psi _2[\tau _\xi v_0, \mu ])\).
-
(v)
The reduced flow \(\Phi _{2,\xi }\) is of class \({\mathscr {C}}^{k-1}\) in \(v_0, \mu , \xi \) and boundedly linear in \(w_0\). It is generated by a reduced parameter-dependent vector field g of class \({\mathscr {C}}^{k-2}\) in \((v_0, \mu )\) and boundedly linear in \(w_0\).
-
(vi)
Any element \(w = w_0 + \Psi _2[v_0, \mu ]w_0\) of \(\mathbf{M}_{0,2}[v_0, \mu ]\) corresponds one-to-one to a solution of
$$\begin{aligned} \frac{\mathop {}\!\mathrm {d}w_0}{\mathop {}\!\mathrm {d}x} = g(v_0, w_0, \mu ) :=\frac{\mathop {}\!\mathrm {d}}{\mathop {}\!\mathrm {d}x} {\mathcal {Q}}\big (\tau _x w_0 + \Psi _2[\tau _x v_0, \mu ] (\tau _x w_0) \big ) \Big |_{x = 0}. \end{aligned}$$We have \(g(v_0, w_0, \mu ) = {{{\,\mathrm{D}\,}}}_{v_0}f(v_0, \mu )w_0\).
We will use the following fiber contraction theorem in the proof; see Sect. 1.11.8 in [12].
Proposition B.7
Let \({\mathcal {X}}\) and \({\mathcal {Y}}\) be complete metric spaces. Consider a continuous map \(\Lambda :{\mathcal {X}}\times {\mathcal {Y}}\rightarrow {\mathcal {X}}\times {\mathcal {Y}}\) of the form
where \(\lambda _1:{\mathcal {X}}\rightarrow {\mathcal {X}}\) and \(\lambda _2:{\mathcal {X}}\times {\mathcal {Y}}\rightarrow {\mathcal {Y}}\). If \(\lambda _1\) is a contraction in \({\mathcal {X}}\), and \(y \mapsto \lambda _2(x,y)\) is a contraction in \({\mathcal {Y}}\) for every fixed \(x \in {\mathcal {X}}\), then \(\Lambda \) has a unique fixed point \((x_0, y_0) \in {\mathcal {X}}\times {\mathcal {Y}}\).
Proof of Theorem B.6
We present the necessary changes in the proof of the center manifold theorem in [24] without the parameter \(\mu \). The transition to the parameter-dependent version is the same as in [24].
In view of Hypothesis B.1(ii), the operator \(\mathbf{T}= ({\mathcal {T}}, {\mathcal {T}})\) is Fredholm and its Fredholm index is twice the index of \({\mathcal {T}}\). We define the Fredholm-bordered operator
with
By Lemma 3.2 in [24], \({\tilde{\mathbf{T}}}\) is invertible for any \(\eta \in (0, \eta _0)\) with
where C is a continuous function of \(\eta \). We define the bordered nonlinearity
Due to Hypothesis B.3, \({\tilde{\mathbf{N}}}^\delta \) is continuous in \((v, w) \in (H^j_{-\eta })^2\). The bordered equation becomes
Applying \({\tilde{\mathbf{T}}}^{-1}\) on both sides, then moving the nonlinear term to the right-hand side, we obtain a fixed point equation
Let \(v_0\) and \(w_0\) be fixed. We apply Proposition B.7 with \(\Lambda = {\mathcal {S}}^\delta \) and \({\mathcal {X}}= {\mathcal {Y}}= H^j_{-\eta }\). Continuity of \({\mathcal {S}}^\delta \) in (v, w) is clear in view of Hypothesis B.3(i) and Theorem B.5 already shows that the first component of \({\mathcal {S}}^\delta \) is a contraction mapping for appropriately chosen cutoff radii \(\delta >0\) and weights \(\eta \in (0, \eta _0)\). Now, let v be fixed in the second component of \({\mathcal {S}}^\delta \). Hypothesis B.3(iii) together with \({\mathcal {N}}^\delta :H^j_{-\eta } \rightarrow H^j_{-\eta }\) being \({\mathscr {C}}^k\) for \(k\ge 2\) imply that
This gives
Choosing \(\delta \) sufficiently small, the second component is a contraction mapping on \(H^j_{-\eta }\) for each fixed v. By Theorem B.7, there exists a unique fixed point \((v,w) :={\tilde{\Psi }}(v_0, w_0)\) for each prescribed \(v_0\) and \(w_0\):
where \({\mathcal {Q}}v = v_0, {\mathcal {Q}}w = w_0\) and \(\Psi _i: {{\,\mathrm{Ker}\,}}{\mathcal {T}}\rightarrow {{\,\mathrm{Ker}\,}}{\mathcal {Q}}\) for \(i=1, 2\). Item (i) is thus established.
Item (ii) follows from the uniqueness of \({\mathcal {M}}_0\) and the fact that \(\chi ^\delta (v) = v\) if the \(H^j_{{{\,\mathrm{u}\,}}}\) norm of v is sufficiently small. Since elements of \(\mathbf{M}_{0,1}\) are precisely solutions of the modified equation \({\mathcal {T}}v + {\mathcal {N}}^\delta (v) = 0\), we insert \(v = {\mathcal {Q}}v + \Psi _1({\mathcal {Q}}v)\) into the equation and differentiate with respect to v. This gives that
is a solution of the modified linearized equation \({\mathcal {T}}w + {{{\,\mathrm{D}\,}}}_v {\mathcal {N}}^\delta (v) w = 0\). Since \({{{\,\mathrm{D}\,}}}_{v_0}\Psi _1(v_0)w_0 \in {{\,\mathrm{Ker}\,}}{\mathcal {Q}}\), we get \({\mathcal {Q}}(w_0 + {{{\,\mathrm{D}\,}}}_{v_0}\Psi (v_0)w_0) = w_0\). By uniqueness of a solution w for each \({\mathcal {Q}}w = w_0\), we obtain \(\Psi _2[v_0] = {{{\,\mathrm{D}\,}}}_{v_0}\Psi _1(v_0)\). The remaining claims in (iii) are straightforward in view of (ii) and Theorem B.5. It follows from Hypothesis B.4 that \(\tau _\xi \circ {\mathcal {N}}^\delta = {\mathcal {N}}^\delta \circ \tau _\xi \), which after a differentiation gives
Then, reasoning as in [24] validates statements (iv)–(vi), except for the last claim \(g(v_0, w_0) = {{{\,\mathrm{D}\,}}}_{v_0} f(v_0)w_0\). This is shown by plugging \(\tau _x w = ({{\,\mathrm{Id}\,}}+ {{{\,\mathrm{D}\,}}}_{v_0}\Psi _1(\tau _x v_0))\tau _x w_0\) into the reduced vector field g in (vi), and then identifying the result with \({{{\,\mathrm{D}\,}}}_{v_0}f = {{{\,\mathrm{D}\,}}}_{v_0} \big ({\mathcal {Q}}\circ \tau _x \circ ({{\,\mathrm{Id}\,}}+ \Psi _1) \big )\). \(\square \)
Computation of the coefficients \(\Psi _{ijk}\)
We wish to solve
subjected to the condition \({\mathcal {Q}}(\Psi _{ijk}) = 0\) for all \(i+j+k \ge 1\). This condition is imposed for unique solvability of \(\Psi _{ijk}\); see the proof of Theorem 3.1.
Using the fact that multiplication by \(x^n\) corresponds to n-times differentiation on the Fourier side, we have
Now, we can compute the convolution of K and monomials \(x^n\), where \(n \in {\mathbb {N}}\). For instance, \(K*1 = 1\) and
where \(\int _{\mathbb {R}}yK(y) \mathop {}\!\mathrm {d}y = 0\) because the integrand is odd. Utilizing the binomial theorem to expand \((x-y)^n\) together with symmetries of the integrands, we arrive at
To solve (27), we are motivated by (30) and make the Ansatz \(\Psi _{200} = \alpha x^2 - {\mathcal {Q}}(\alpha x^2)\), where subtraction by \({\mathcal {Q}}(\alpha x^2)\) is to make sure that \({\mathcal {Q}}(\Psi _{200}) = 0\). Since \({\mathcal {Q}}(\alpha x^2)=0\) for all \(\alpha \in {\mathbb {R}}\), it can be removed. Plugging the Ansatz into (27) yields
Since \(m''(0) = -1/3\), \(\alpha = -3\) necessarily. In conclusion, \(\Psi _{200} = -3x^2\). The linear Eqs. (28) and (29) are solved in a similar way. We summarize the results below.
A global bifurcation theorem
Let \({\mathcal {X}}\), \({\mathcal {Y}}\) be Banach spaces and \({\mathcal {U}}\subset {\mathcal {X}}\times {\mathbb {R}}\) an open set. Consider the abstract operator equation
where \(F:{\mathcal {U}}\rightarrow {\mathcal {Y}}\) is an analytic mapping. The following is a version of Theorem 6.1 in [11] which has been slightly modified to better fit the situation in the present paper. The proof remains the same.
Theorem D.1
Assume
-
(A)
for all \((\varphi ^*, \nu ^*) \in {\mathcal {U}}\cap F^{-1}(0)\), the Fréchet derivative \({{{{\,\mathrm{D}\,}}_\varphi }} F(\varphi ^*, \nu ^*)\) is Fredholm of index zero;
-
(B)
there exists a local curve of solutions \({\mathcal {C}}_{loc}\) with a continuous parametrization \( (0, \nu ') \ni \nu ^* \mapsto (\varphi ^*_{\nu ^*}, \nu ^*)\), so that
$$\begin{aligned} {\mathcal {C}}_{loc} = \{(\varphi ^*_{\nu ^*}, \nu ^*) \, | \, 0< \nu ^* < \nu '\} \subset {\mathcal {U}}\cap F^{-1}(0) \end{aligned}$$and
$$\begin{aligned} \lim _{\nu ^* \rightarrow 0^+} (\varphi ^*_{\nu ^*}, \nu ^*) \in \partial {\mathcal {U}}, \end{aligned}$$as well as
$$\begin{aligned} {{{{\,\mathrm{D}\,}}_\varphi }} F(\varphi ^*_{\nu ^*}, \nu ^*):{\mathcal {X}}\rightarrow {\mathcal {Y}} \, \, \text { is invertible for all }(\varphi ^*_{\nu ^*}, \nu ^*) \in {\mathcal {C}}_{loc}. \end{aligned}$$
Then, \({\mathcal {C}}_{loc}\) is contained in a curve of solutions \({\mathcal {C}}\), which is parametrized as
for some continuous map \((0,\infty ) \ni s \mapsto (\varphi _s, \nu _s)\). The global curve \({\mathcal {C}}\) has the following properties.
-
(a)
One of the following alternatives holds:
-
(i)
(blowup) as \(s \rightarrow \infty \),
$$\begin{aligned}M(s) :=\Vert \varphi _s\Vert _{{\mathcal {X}}} + |\nu _s| + \frac{1}{{{\,\mathrm{dist}\,}}((\varphi _s, \nu _s), \partial {\mathcal {U}})} \rightarrow \infty ;\end{aligned}$$ -
(ii)
(loss of compactness) there exists a sequence \(s_n \rightarrow \infty \) as \(n \rightarrow \infty \) such that \(\sup _n M(s_n) < \infty \) but \((\varphi _{s_n})_n\) has no subsequence convergent in \({\mathcal {X}}\).
-
(i)
-
(b)
Near each point \((\varphi _{s_0}, \nu _{s_0}) \in {\mathcal {C}}\), we can reparametrize \({\mathcal {C}}\) so that \(s \mapsto (\varphi _s, \nu _s)\) is real analytic.
-
(c)
\((\varphi _s, \nu _s) \notin {\mathcal {C}}_{loc}\) for s sufficiently large.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Truong, T., Wahlén, E. & Wheeler, M.H. Global bifurcation of solitary waves for the Whitham equation. Math. Ann. 383, 1521–1565 (2022). https://doi.org/10.1007/s00208-021-02243-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00208-021-02243-1