
Abstract
The main result of this work is a homogenization theorem via variational convergence for elastic materials with stiff checkerboard-type heterogeneities under the assumptions of physical growth and non-self-interpenetration. While the obtained energy estimates are rather standard, determining the effective deformation behavior, or in other words, characterizing the weak Sobolev limits of deformation maps whose gradients are locally close to rotations on the stiff components, is the challenging part. To this end, we establish an asymptotic rigidity result, showing that, under suitable scaling assumptions, the attainable macroscopic deformations are affine conformal contractions. This identifies the composite as a mechanical metamaterial with a negative Poisson’s ratio. Our proof strategy is to tackle first an idealized model with full rigidity on the stiff tiles to acquire insight into the mechanics of the model and then transfer the findings and methodology to the model with diverging elastic constants. The latter requires, in particular, a new quantitative geometric rigidity estimate for non-connected squares touching each other at their vertices and a tailored Poincaré type inequality for checkerboard structures.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
When speaking of metamaterials, one usually refers to engineered and artificially fabricated materials tailored to show specific desirable properties that are rare to find naturally. Among the many different types of metamaterials are electrical, magnetic, acoustic, and mechanical. We focus here on the latter, specifically on those characterized by a negative Poisson’s ratio, meaning a positive ratio of transversal and axial strains, which are called auxetic. In contrast to standard materials, like a piece of rubber, they respond to stretching in uniaxial direction by thickening in the direction orthogonal to the applied force. Among the special characteristics of auxetics are enhanced shear moduli, increased fracture resistance, and higher shock absorption capacity, which renders them beneficial for numerous industrial applications. Even though the roots of auxetics are reported to date back already to the 1920 s [1], the topic started to attract increased attention in the materials science and engineering communities only decades later, when Lakes [2] was the first to manufacture foams with negative Poisson’s ratio in 1987.
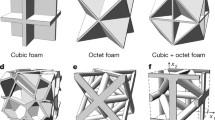
Several mechanisms have since been presented in the literature that give rise to auxetic material behavior, for instance, re-entrant honeycomb or bow tie structures [3] (where also the term ‘auxetic’ from the ancient Greek word for ‘stretchable’ was coined), multiscale laminates [4], planar rhombi-slit kirigami [5, 6], and Kagome lattices [7, 8]. Most relevant for this work is the pattern of rotating rigid squares connected by hinges at the vertices, as introduced in [9] by Grima and Evans, see Fig. 1.

Illustrations of the auxetic deformation behavior of checkerboard-type composites with differently sized stiff squares (colored in gray)
Also other rigid building blocks, such as triangles [10, 11] or rectangles [12,13,14], have been used by these (and other co-) authors to produce a negative Poisson’s ratio. More recently, there are thrusts of combining several geometric arrangements at the microscale to design state-of-the-art materials with unique characteristics [15, 16]. For more on the subject, we refer to the review article [17] and the references therein. Compared with the research activities in the mechanics disciplines, the coverage of auxetic structures from the standpoint of mathematics seems rather sporadic. The works by Borcea and Streinu, e.g., [18, 19], approach the problem by recoursing to algebraic geometry. They investigate what crystalline and artificial structures give rise to auxetic behavior and devise design principles, based on their earlier graph-theoretical papers on the deformation of periodic frameworks with rigid edges [20].
This paper contributes to the rigorous mathematical theory of auxetic metamaterials, approaching the problem from a new perspective, namely that of asymptotic variational analysis. We study a class of composites in a two-dimensional setting of nonlinear elasticity that show a small-scale pattern of stiff and soft tiles arranged into a checkerboard structure as illustrated in Fig. 2b), cf. [21] by Kochmann and Venturini. Working with a variational model (detailed in Sect. 1.1 below), the task is to rigorously determine the effective material behavior and, in particular, characterize the attainable macroscopic deformations along with their energetic cost. To this end, we resort to homogenization via \(\Gamma \)-convergence (for a general introduction to \(\Gamma \)-convergence, see [22, 23]). Our main result (Theorem 1) is a homogenization result that is non-standard compared to classical papers like [24, 25] and the works on high-contrast media [26,27,28,29]. Instead, it can be interpreted in the context of asymptotic rigidity statements for other reinforcing elements like layers [30,31,32] and fibers [33]. This means, generally speaking, that the models are governed by an interesting interplay between the specific geometric pattern of the heterogeneities and a strong contrast in the elasticity constants, which leads to global effects and overall, to a strongly restricted macroscopic material response. For the checkerboard composites under consideration, we prove in a suitable scaling regime between the stiffness and length scale parameters that the macroscopic deformations are given by affine maps describing conformal contraction, confirming a negative Poisson’s ratio. Since the identified effective behavior coincides with that of an idealized version of the model with fully rigid elasticity of the stiff components (Theorem 5), one may also view our main theorem as part of a robustness analysis, which is significant with a view to the practical applicability of these metamaterials. As a closely related issue relevant for the manufacturing process, which is, however, beyond the scope of this work, is a solid understanding of the sensitivity of imperfections and perturbations in the geometry of the small-scale structures. Further interesting research directions include the study of metamaterial with rotating triangle structures, higher-dimensional settings, the optimal design of the stiff components, and other contrast scaling regimes giving rise to a broader class of admissible macroscopic deformations beyond globally affine ones.
1.1 Setup of the Problem
Let \(\Omega \subset {\mathbb {R}}^2\) be a bounded Lipschitz domain that models the simplified reference configuration of a thin elastic body. Deformations of that body are described by maps \(u:\Omega \rightarrow {\mathbb {R}}^2\), which - unless mentioned otherwise - are taken to lie in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\) with \(p>2\), and are thus, in particular, continuous by Sobolev embedding; note that some of our results also extend to \(p=2\). We generally require our deformations to be orientation preserving, meaning with positive Jacobi-determinant almost everywhere, and forbid self-interpenetration of matter by imposing the Ciarlet–Nečas condition [34],
which corresponds to injectivity of u a.e. in \(\Omega \); for more on the topic of global invertibility of Sobolev maps, we refer, for instance, to the classical works [35, 36] or to [37,38,39] for some recent developments. With these assumptions, we introduce the class of admissible deformations as

a The partition of the unit cell Y into the four tiles \(Y_1,\ldots ,Y_4\) as in (1.2) with \(Y_{\textrm{stiff}}=Y_1\cup Y_3\) colored in gray and \(Y_\textrm{soft}=Y_2\cup Y_4\) in white. b The reference configuration \(\Omega \) with its stiff components \(\Omega \cap \varepsilon Y_\textrm{stiff}\) marked in gray
Next, we formalize the geometry of the material heterogeneities, arranged in a checkerboard-like fashion. To this end, the periodicity cell \(Y=(0,1]^2\) is subdivided into four tiles, precisely,
for a given parameter \(\lambda \in (0,1)\), and we define
so that \(Y = Y_{\textrm{stiff}}\cup Y_\textrm{soft}\). Note that, without further mentioning, the sets \(Y_{\textrm{stiff}}, Y_\textrm{soft}, Y_1, \ldots , Y_4\) will also be identified throughout with its Y-periodic extensions. The stiff and soft components of the elastic body forming a periodic pattern at length scale \( \varepsilon >0\) are then described by the intersection of \(\Omega \) with \( \varepsilon Y_\textrm{stiff}\) and \( \varepsilon Y_\textrm{soft}\), respectively. For an illustration of the geometric setup, we refer to Fig. 2.
The material properties of the composite are modeled by the two energy elastic densities \(W_\mathrm{stiff, \varepsilon }\) and \(W_\textrm{soft}\). On the stiff parts, we take \(W_\mathrm{stiff, \varepsilon }: {\mathbb {R}}^{2\times 2}\rightarrow [0, \infty ]\) for \( \varepsilon >0\) as a continuous function such that
with a constant \(c>0\) and a parameter \(\beta >0\). While rotations do not cost any energy, deviations from \({{\,\textrm{SO}\,}}(2)\) are energetically penalized with diverging elastic constants as \( \varepsilon \) tends to zero, i.e., the stiff material is asymptotically rigid. Qualitatively, this means that the stiff components become stiffer and stiffer as the length scale shrinks. The tuning parameter \(\beta \) controls the degree of increasing stiffness and will be chosen later to be sufficiently large.
On the soft components, we consider a continuous function \(W_\textrm{soft}:{\mathbb {R}}^{2\times 2}\rightarrow [0,\infty ]\) that satisfies for \(p\ge 2\),
where \(c>0\) and \(\theta :(0,\infty )\rightarrow [0,\infty )\) is a convex function such that
cf. also [40, Equations (2.1), (2.2)]. These estimates on the soft energy density together with the assumption that \(W_\textrm{soft}^\textrm{qc}\) is polyconvex (see Theorem 1 below) enable relaxation results for functionals with physical growth conditions, see [40] by Conti and Dolzmann. A relaxation step in this spirit necessarily occurs in our \(\Gamma \)-convergence result.
Merging the modeling assumptions introduced above gives rise to a variational problem with the elastic energy functional (defined on deformations with zero mean value)
with the inhomogeneous energy density
Hence, the observed deformations of the composite with checkerboard structure at scale \( \varepsilon \), correspond to minimal energy states of \({\mathcal {I}}_ \varepsilon \) - up to accounting for external forces, which we do not explicitly include here, as they can be handled via continuous perturbations. In what follows, we focus on capturing the effective material behavior through the convergence of minimizers in the limit of vanishing length scale.
1.2 The Main Result
With this setup at hand, we can now state the main contribution of this work, the following homogenization result by \(\Gamma \)-convergence for the elastic energies \(({\mathcal {I}}_ \varepsilon )_ \varepsilon \) as \( \varepsilon \rightarrow 0\).
Theorem 1
(Homogenization of checkerboard structures) Let \(\Omega \subset {\mathbb {R}}^2\) be a bounded Lipschitz domain, \(p \ge 2\), \(\beta > 2p+2\), and let \({\mathcal {I}}_ \varepsilon \) for \( \varepsilon >0\) as in (1.5), (1.1), and (1.6) with \(W_\mathrm{stiff, \varepsilon }\) as in (1.3) and \(W_\textrm{soft}\) as in (1.4) such that \(W_\textrm{soft}^\textrm{qc}\) is polyconvex. Then, the family of functionals \(({\mathcal {I}}_ \varepsilon )_ \varepsilon \) \(\Gamma \)-converges for \( \varepsilon \rightarrow 0\) with respect to the strong \(L^p(\Omega ;{\mathbb {R}}^2)\)-topology to
where
and the homogenized density is given for \(F\in K\) by
Moreover, any sequence \((u_ \varepsilon )_ \varepsilon \subset L^p_0(\Omega ;{\mathbb {R}}^2)\) with \(\sup _{ \varepsilon }{\mathcal {I}}_ \varepsilon (u_ \varepsilon )<\infty \) has a subsequence that converges weakly in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\) to an affine function \(u:\Omega \rightarrow {\mathbb {R}}^2\) with vanishing mean value and \(\nabla u\in K\).
This theorem shows rigorously that the effective behavior of materials with high-contrast checkerboard structures, governed by the variational problem with functional \({\mathcal {I}}_\textrm{hom}\), is restricted to affine conformal contractions. Indeed, the macroscopically attainable deformations correspond exactly to the domain of the limit energy \({\mathcal {I}}_\textrm{hom}\), which comprises all affine functions with zero mean value and whose gradients are suitable positive scalar multiples of rotation matrices. The latter implies that the Poisson’s ratio of the composites under consideration is \(-1\), which reflects their auxetic nature, see Remark 3 b). A comparison inspired by classical homogenization results like [24, 25] reveals that the homogenized density \(W_\textrm{hom}\) coincides essentially (that is, up to maximal compressions) with the cell formula associated to the related model where the stiff tiles are fully rigid; we refer to Remark 5 for more details.
Further more, two comments about the technical hypotheses in the previous theorem are in order.
Remark 1
-
a)
Note that the statement of Theorem 1 is sensitive to the regularity of the admissible functions and fails for \(p<2\). The intuition is that the material can break up at the connecting joints between two stiff neighboring squares, when the deformations, here \(W^{1,p}\)-functions, can have discontinuities in isolated points, so that a large class of limit maps can be reached, cf. Proposition 7. Interestingly, this observation about the critical role of the integrability parameter is in contrast to related homogenization results for materials with strict soft inclusions [41, 42] or layered materials [30, 31], which are valid for any \(p>1\).
-
b)
The condition \(\beta >2p+2\) on the tuning parameter emerges naturally from our approach (see Sect. 1.3), but it is currently not clear whether this scaling regime is optimal. Answering this question remains an interesting open problem. We presume that there are regimes for which non-affine deformations are achievable in the limit. Approximations of such deformations at finite length scale were analyzed, for example, in the related rotation-square configuration with voids of [43]. In the context of Kirigami metamaterials, the authors of [5, 6] provide a coarse-graining rule that describes the macroscopic deformation behavior with the help of a partial differential equation depending on the local rotation of the unit cell and the slit actuation angle.
1.3 Approach and Methodology
The stepping stone for our analysis is a solid understanding of the related model with rigid elasticity on the stiff tiles, which is inspired by [9] and results formally by replacing the density \(W_\mathrm{stiff, \varepsilon }\) in (1.6) by
Due to this stricter assumption, the macroscopically attainable deformations are easier to characterize, since the possible deformations even for structures at scale \( \varepsilon >0\), that is, \(u_ \varepsilon \in {\mathcal {A}}\) with
which by well-known rigidity results (e.g., [44]) is equivalent to \(\nabla u_ \varepsilon \) coinciding with a single rotation on each connected component of \( \varepsilon Y_{\textrm{stiff}}\), are rather limited. Indeed, each such \(u_ \varepsilon \) can be characterized as the sum of a function that is piecewise affine on the tiles with at most four different gradients, uniquely determined by two rotations, and local modulations on each soft tile with a Sobolev function with zero boundary values (Corollary 3). This follows from basic geometric considerations that allow us to determine the rigid motions acting on the boundaries of the rigid components, while accounting for orientation preservation. The next step of identifying the weak \(W^{1,p}\)-limits of sequences \((u_ \varepsilon )_ \varepsilon \) is then standard (see Proposition 4) and yields the affine deformations with gradients in the set K in (1.8) - so exactly the finite-energy states of the homogenized functional (1.7).
Besides the insight into the case with fully rigid components, we wish to highlight two technical ingredients that are substantial for the proof of Theorem 1. They are both embedded in a general proof strategy of asymptotic rigidity results (cf. [31,32,33] and also [45]) essential for expanding the observations on the asymptotic behavior of sequences \((u_ \varepsilon )_ \varepsilon \subset {\mathcal {A}}\) when the exact differential inclusion (1.11) is weakened to the approximate version
with a constant \(C>0\).
The first key tool is a quantitative rigidity estimate in the spirit of the seminal work by Friesecke et al. [45] applicable to cross structures, as stated in Lemma 10; by an (unscaled) cross structure \(E'\), we understand a non-connected open set contained in \(Y_{\textrm{stiff}}\) consisting of the four stiff neighboring squares of a single soft rectangle. If one applies [45, Theorem 3.1] individually to a function \(u\in W^{1, p}(E';{\mathbb {R}}^2)\) restricted to each of the connected components of \(E'\), this yields four potentially different rotation matrices close to the gradient of u. Lemma 10 states that only two rotations are in fact enough. We prove by careful geometric arguments in combination with an approximate version of the non-interpenetration condition (see Lemma 9) that the rotations on opposite squares can be chosen identical while preserving suitable control on the error terms. More precisely, the \(L^p\)-error between the rotations and the gradients of u is given terms of \(\delta ^{1/2}\) with \(\delta =\Vert {{\,\textrm{dist}\,}}(\nabla u, {{\,\textrm{SO}\,}}(2))\Vert _{L^p(E')}\); note that the square root is due to our technical approach and comes in through Pythagoras’ theorem. For the scaling analysis associated with Lemma 10, we refer to Remark 9.
The second tool is a Poincaré-type inequality with uniform constants for checkerboard structures, which has - in contrast to Lemma 10 - a global character. Roughly speaking, we show that a function \(u\in W^{1,p}(\Omega ;{\mathbb {R}}^2)\) with vanishing mean value on the stiff parts \(\Omega \cap \varepsilon Y_{\textrm{stiff}}\) and the property that the values of u in interior of \(\Omega \) control u also in a boundary layer, then the \(L^p\)-norm of u can be estimated by \(\Vert \nabla u\Vert _{L^p(\Omega \cap \varepsilon Y_{\textrm{stiff}};{\mathbb {R}}^2)}\) multiplied with a constant independent of \(\varepsilon \); the precise statement can be found in Lemma 12. Our proof is inspired by a classical extension result in the literature. Based on [46] by Acerbi, Chiadò Piat, Dal Maso and Percivale, we derive an approximate extension result tailored for our purposes, which then allows us to mimic the usual indirect proof of Poincaré’s inequality. To handle the technicalities around the joints, where the sets of stiff tiles does not have Lipschitz boundary, we proceed in two steps. We first extend our functions partially from the stiff to the soft parts by standard reflection arguments, leaving out small balls around the corners, and then fill them via an extension according to [46].
1.4 Outline
The rest of this paper is organized as follows: Sect. 2 is concerned with the analysis of the auxiliary model with full rigid tiles. After establishing the deformation behavior of the individual soft components on the local level in Sect. 2.1, we characterize in Sect. 2.2 the set of attainable macroscopic deformations in terms of affine conformal contractions. The corresponding homogenization result via variational convergence, which gives rise to the effective energy \({\mathcal {I}}_\textrm{hom}\) as \(\Gamma \)-limit, is proven in Sect. 2.3. We conclude this first part of the paper in Sect. 2.4 with a detailed discussion of our various modeling assumptions, including the effects of requiring orientation preservation, the Ciarlet–Nečas condition and \(p>2\). The core of this work is Sect. 3, where we investigate the model with diverging elastic energy contribution on the stiff parts as introduced in Sect. 1.1. We provide the technical basis in Sect. 3.1 by proving the two technical key tools, a quantitative rigidity estimate for cross structures and a Poincaré-type inequality for checkerboard structures. Section 3.2 then covers the proof of the compactness statement in Theorem 1 and determines the possible effective deformations through the weak closure of the admissible deformations of small-scale checkerboard structures. Finally, the remaining parts of the proof of the main result Theorem 1 can be found in Sect. 3.3.
1.5 Notation
The standard unit vectors in \({\mathbb {R}}^2\) are denoted by \(e_1\) and \(e_2\). For two vectors \(a,b\in {\mathbb {R}}^2\), we write \(a\cdot b\) for their scalar product. The one-dimensional unit sphere \({\mathcal {S}}^1\) consists of all vectors in \({\mathbb {R}}^2\) with unit length. For \(a\in {\mathbb {R}}^{2}\), let \(a^\perp := -a_2e_1 +a_1e_2\), while for \(A\in {\mathbb {R}}^{2\times 2}\), we define \(A^\perp =(Ae_2|-Ae_1)\). We equip \({\mathbb {R}}^{m\times n}\) for \(m,n\in \{1,2\}\) with the standard Frobenius norm, that is, \(|A|=\sqrt{{{\,\textrm{Tr}\,}}(A^TA)}\) for \(A\in {\mathbb {R}}^{m\times n}\) where \(A^T\) is the transpose of A and \({{\,\textrm{Tr}\,}}\) denotes the trace operator. We write \({{\,\textrm{Id}\,}}\) for the identity matrix in \({\mathbb {R}}^{2\times 2}\) and \({{\,\textrm{SO}\,}}(2)\) stands for the special orthogonal group of matrices in \({\mathbb {R}}^{2\times 2}\).
If \(U,V\subset {\mathbb {R}}^2\), then \(U+V:=\{u+v:u\in U,v\in V\}\) describes their Minkowski sum. The notation \(A\Subset B\) for two sets \(A,B\subset {\mathbb {R}}^{2}\) means that A is compactly contained in B. We refer to a non-empty, open, connected set as a domain. Given \(x_0\in {\mathbb {R}}^2\) and \(R,r>0\), we set \(B(x_0,R) = \{x\in {\mathbb {R}}^2: |x-x_0|<R\}\) as the ball around \(x_0\) with radius R, and
as the annulus around \(x_0\) with outer radius R and inner radius r. We write \(|\cdot |\) for the Lebesgue measure and use \(\sharp (\cdot )\) for the counting measure.
For an open set \(U\subset {\mathbb {R}}^2\) and \(1\le p \le \infty \), we use the standard notation for Lebesgue and Sobolev spaces \(L^p(U;{\mathbb {R}}^m)\), \(W^{1,p}(U;{\mathbb {R}}^m)\) and \(W^{1,p}_0(U;{\mathbb {R}}^m)\) with vanishing boundary values in the sense of traces, and define \(L^p_0(U;{\mathbb {R}}^2):=\{u\in L^p(U;{\mathbb {R}}^2): \int _U u(x) \,{\textrm{d}}x= 0\}\). For functions \(f:{\mathbb {R}}^{2\times 2}\rightarrow [0,\infty ]\), we briefly write \(f(Ae_1|Ae_2)\) instead of \(f((Ae_1|Ae_2))\) for \(A=(Ae_1|Ae_2)\). The indicator function \(\mathbb {1}_U\) of a set \(U\subset {\mathbb {R}}^2\) is identical to 1 on U and vanishes everywhere else. Furthermore, we define

where \(D\subset {\mathbb {R}}^2\) is an arbitrary bounded open set and  describes the mean integral, as the quasiconvex envelope of f. We say that f is polyconvex if there exists a convex and lower semicontinuous function \(g:{\mathbb {R}}^{2\times 2}\times {\mathbb {R}}\rightarrow [0,\infty ]\) such that \(f(F) = g(F,\det F)\) for all \(F\in {\mathbb {R}}^{2\times 2}\).
describes the mean integral, as the quasiconvex envelope of f. We say that f is polyconvex if there exists a convex and lower semicontinuous function \(g:{\mathbb {R}}^{2\times 2}\times {\mathbb {R}}\rightarrow [0,\infty ]\) such that \(f(F) = g(F,\det F)\) for all \(F\in {\mathbb {R}}^{2\times 2}\).
Throughout the document, we use \(C>0\) for generic constants which may differ from term to term; if we want to highlight the dependence of certain quantities, we include them in parentheses. Finally, families indexed with a continuous parameter \( \varepsilon >0\) refer to any sequence \(( \varepsilon _j)_j\) with \( \varepsilon _j\rightarrow 0\) as \(j\rightarrow \infty \).
2 Analysis of the Model with Fully Rigid Tiles
2.1 Auxiliary Results
The next lemma identifies local restrictions on neighboring rotations of the stiff parts in the checkerboard structure and shows that the boundary values of a deformation of any single soft tile coincide with those of a piecewise affine function. This lemma constitutes a useful technical tool for the analysis, both with and without orientation preservation. While some of the affine boundary conditions are inadmissible in the former case, see Corollary 3, they will be relevant later in Proposition 6, when we discuss the assumptions of the model setup.
Lemma 2
Let \(E\subset {\mathbb {R}}^2\) be an open rectangle with two sides of length l parallel to \(e_1\), two sides of length \(\mu l\) and \(\partial _iE=\Gamma _i\) for \(i=1, \ldots , 4\) the linear pieces of the boundary \(\partial E\), numbered clockwise, starting in the lower left corner. If \(u\in W^{1,p}(E;{\mathbb {R}}^2)\) with \(p \ge 2\) is such that
the following two statements hold:
-
a)
There exist matrices \(R, S \in {{\,\textrm{SO}\,}}(2)\) depending only on \(u|_{\partial E}\) as well as functions \(F_{\pm }, G_{\pm }: ({{\,\textrm{SO}\,}}(2))^{2} \times (0,1) \rightarrow {{\,\textrm{SO}\,}}(2)\) being independent of E and u such that
$$\begin{aligned} \bigcup _{i=1}^4 R_i \subset \{R, S, F_{\pm }(R,S,\mu ), G_{\pm }(R,S,\mu )\} \subset {{\,\textrm{SO}\,}}(2). \end{aligned}$$In particular, it holds that \(F_{\pm }(R,S,1) = \pm R^\perp \), \(G_{\pm }(R,S,1) = \pm S^\perp \).
-
b)
There exist \(\varphi \in W_0^{1,p}(E;{\mathbb {R}}^2)\) and a piecewise affine function \(v:E\rightarrow {\mathbb {R}}^2\) with at most two different gradients in the set
$$\begin{aligned}&\{(Se_1|Re_2), (F_{+}(R,S,\mu )e_1|G_{-}(R,S,\mu )e_2),\\&\quad (F_{-}(R,S,\mu )e_1|G_{+}(R,S,\mu )e_2)\} \subset {\mathbb {R}}^{2\times 2} \end{aligned}$$such that
$$\begin{aligned} u=v+\varphi . \end{aligned}$$(2.2)

Illustration of the boundary deformations \(u(\partial E)\) for \(\mu =1\)

Illustration of the boundary deformations \(u(\partial E)\) for \(0<\mu <1\)
Proof
Case 1: E is an open square.
After scaling and shifting, we may assume without loss of generality that \(E=(0, 1)^{2}\) and \(u(0)=0\). Due to \(p \ge 2\), the trace of u is continuous on \(\partial E\). For \(p >2\), this is a direct consequence of the fact that \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\) embeds into the Hölder space \(C^{0, 1-\frac{2}{p}}(\overline{\Omega };{\mathbb {R}}^2)\). For \(p=2\), this follows from the fact that the boundary values (2.1) satisfy the assertion (c) of Theorem 1.5.2.3 in [47] if and only if they are continuous on \(\partial E\). Because of (2.1), the continuity of \(u(\partial E)\) and the fact that triangles which correspond in their three side lengths are congruent, it follows that \(u(\partial E)\) has to be either
-
i) the boundary of a rhombus with side length 1 or
-
ii) a straight line of length 2 or
-
iii) a hook with two arms of length 1 each or
-
iv) a straight line of length 1,
cf. Fig. 3.
For i) and ii), we observe that \(R_1=R_3=:R\) and \(R_2=R_4=:S\). Hence, the affine map \(v:E\rightarrow {\mathbb {R}}^2\) with \(\nabla v=(Se_1|Re_2)\) and \(v(0)=0\) satisfies \(u(\partial E)=v(\partial E)\).
The situations iii) and iv) imply that
or
For (2.3), let \(R:=R_1\), \(S:=R_2\) and \(E_\textrm{nw}=\{x\in (0,1)^2: x_2>x_1\}\), \(E_\textrm{se}=\{x\in (0,1)^2:x_2<x_1\}\) be the open triangles that result from cutting E at the diagonal. We define \(v:E\rightarrow {\mathbb {R}}^2\) via \(v(0)=0\) and
By construction, v is compatible along the diagonal, hence \(v\in W^{1, \infty }(E;{\mathbb {R}}^2)\) and \(v(\partial E)=u(\partial E)\).
We argue similarly for (2.4), setting \(R:=R_1\), \(S:=R_4\), \(E_\textrm{sw}=\{x\in (0,1)^2: x_2<1-x_1\}\) and \(E_\textrm{ne}=\{x\in (0,1)^2:x_2>1-x_1\}\). Defining a continuous function \(v:E\rightarrow {\mathbb {R}}^2\) by \(v(0)=0\) and
yields a piecewise affine function with \(v(\partial E) = u(\partial E)\).
Hence, we obtain the statements of the lemma for \(\mu =1\) by defining
Case 2: E is an open rectangle and \(0< \mu <1\).
After scaling and shifting, we may assume without loss of generality that \(E=(0, 1) \times (0,\mu )\) and that \(u(0)=0\). Because of \(p \ge 2\), the trace of u is again continuous on \(\partial E\). For the same reasons as above it follows that \(u(\partial E)\) is either
-
i) the boundary of a parallelogram with side lengths 1 and \(\mu \) or
-
ii) a straight line of length \(1+\mu \) or
-
iii) the union of the two sides below or above one diagonal of a parallelogram from i) with the reflection of the two other sides on that diagonal,
cf. Fig. 4.
For i) and ii), we observe that \(R_1=R_3=:R\) and \(R_2=R_4=:S\). Hence, the affine map \(v:E\rightarrow {\mathbb {R}}^2\) with \(\nabla v=(Se_1|Re_2)\) and \(v(0)=0\) satisfies \(u(\partial E)=v(\partial E)\).
The situation iii) implies that
or
where \(F_{\pm }, G_{\pm }\) are given by
which can be directly computed by using the facts that the reflection \(\mathcal {R}_u v\) of a vector v across a line \(\{\lambda u: \lambda \in \mathbb {R}\}\) is determined by
and that \(|Se_1|=|Re_2|=1\). We remark that the denominators in (2.11)–(2.12) cannot be equal to 0 for \(0< \mu <1\) and that in the case of \(\mu =1\), (2.11)–(2.12) coincide with (2.7)–(2.8) if \(Se_1 \cdot Re_2 \ne \mp 1\).
For (2.9), let \(R:=R_1\), \(S:=R_2\) and \(E_\textrm{nw}=\{x\in (0,1)\times (0,\mu ): x_2>\mu x_1\}\), \(E_\textrm{se}=\{x\in (0,1)^2:x_2<\mu x_1\}\) be the open triangles that result from cutting E at the diagonal. We define \(v:E\rightarrow {\mathbb {R}}^2\) via \(v(0)=0\) and
By construction, v is compatible along the diagonal, hence \(v\in W^{1, \infty }(E;{\mathbb {R}}^2)\), and \(v(\partial E)=u(\partial E)\).
We argue similarly for (2.10), setting \(R:=R_1\), \(S:=R_4\), \(E_\textrm{sw}=\{x\in (0,1)\times (0,\mu ): x_2<\mu (1-x_1)\}\) and \(E_\textrm{ne}=\{x\in (0,1)\times (0,\mu ):x_2>\mu (1-x_1)\}\). Defining a continuous function \(v:E\rightarrow {\mathbb {R}}^2\) by \(v(0)=0\) and
yields a piecewise affine function with \(v(\partial E) = u(\partial E)\). \(\square \)
The next result specializes the previous two lemmas to the case of orientation and locally volume-preserving maps.
Corollary 3
(Decomposition on a single soft tile) Let E and \(u\in W^{1,p}(E;{\mathbb {R}}^2)\) be as in Lemma 2.
-
a)
If \(\det \nabla u>0\) a.e. in E, then there exist \(R, S\in {{\,\textrm{SO}\,}}(2)\) with \(\det (Se_1|Re_2) = Se_1\cdot Re_1>0\), \(b\in {\mathbb {R}}^2\) and \(\varphi \in W_0^{1,p}(E;{\mathbb {R}}^2)\) such that
$$\begin{aligned} u(x) = (Se_1|Re_2)x+ b + \varphi (x) \quad \text {for a.e. } x\in E. \end{aligned}$$(2.15) -
b)
If additionally, \(\det \nabla u=1\) a.e. in E, then there exists \(R\in {{\,\textrm{SO}\,}}(2)\), such that
$$\begin{aligned} u(x) = Rx+ b + \varphi (x) \quad \text {for a.e. }x\in E. \end{aligned}$$
Proof
The statement a) follows from the observation that the situations iii) and iv) in the cases 1 and 2 in the proof of Lemma 2 can be ruled out since u is orientation preserving. Indeed, assume to the contrary that there exists p as constructed in (2.5) or (2.13). In these cases, the identity (2.2) and the Null-Lagrangian property of the determinant yield the contradictions
or
where the second to last equality follows by (2.7)–(2.8), (2.11)–(2.12) and basic algebraic properties of the determinant. The cases (2.6) and (2.14) can be handled analogously.
The only remaining possible boundary values of u are described by the situations i) and ii) in the proof of Lemma 2. Hence, there exist two rotations \(R,S\in {{\,\textrm{SO}\,}}(2)\) and \(\varphi \in W^{1,p}_0(E;{\mathbb {R}}^2)\), such that (2.15) is satisfied. Note that \(\det (Se_1|Re_2) = Se_1\cdot Re_1\) and distinguish three cases: If \(\det (Se_1|Re_2) >0\), then there is nothing to prove; otherwise \(\det (Se_1|Re_2)\le 0\) (equality corresponds to the case ii)) and it holds that
which produces a contradiction.
b) In case \(\det \nabla u=1\) a.e. in E, then we obtain analogously to (2.16) the identity
from which we conclude that \(Re_1\) is identical to \(Se_1\). The desired equality then follows from (2.15). \(\square \)
2.2 Macroscopic Deformation Behavior
In this section, we focus on maps \(u_ \varepsilon \in {\mathcal {A}}\) with \(\nabla u_ \varepsilon \in {{\,\textrm{SO}\,}}(2)\) on \(\Omega \cap \varepsilon Y_\textrm{stiff}\). We prove via Corollary 3 that \(\nabla u_ \varepsilon \) can essentially only attain two different values \(S_ \varepsilon ,R_ \varepsilon \in {{\,\textrm{SO}\,}}(2)\) with \(S_ \varepsilon e_1\cdot R_ \varepsilon e_1>0\) on \(\Omega \cap \varepsilon Y_\textrm{stiff}\), which suggests an affine limit with gradient in the set K as in (1.8). The next proposition proves this statement (on any compactly contained subset) and serves as the compactness result for the homogenization in Theorem 5 later in this section.
Proposition 4
(Characterization of limit deformations) Let \(p \ge 2\).
-
a)
If a sequence \((u_ \varepsilon )_ \varepsilon \subset {\mathcal {A}}\) (recall (1.1)) satisfies
$$\begin{aligned} \nabla u_ \varepsilon \in {{\,\textrm{SO}\,}}(2)\ \text {a.e. in } \Omega \cap \varepsilon Y_\textrm{stiff}\end{aligned}$$(2.17)and \(u_ \varepsilon \rightharpoonup u\) in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\), then u is affine with
$$\begin{aligned} \nabla u = F \in K:=\{\lambda S + (1-\lambda )R : R,S\in {{\,\textrm{SO}\,}}(2), Re_1\cdot Se_1 \ge 0\}. \end{aligned}$$ -
b)
For every affine function \(u:\Omega \rightarrow {\mathbb {R}}^2\) with \(\nabla u \in K\) there exists a sequence of piecewise affine functions \((u_ \varepsilon )_ \varepsilon \subset {\mathcal {A}}\) satisfying (2.17) and \(\int _\Omega u_ \varepsilon \,{\textrm{d}}{x} = \int _\Omega u\,{\textrm{d}}{x}\) such that \(u_ \varepsilon \rightharpoonup u\) in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\).
Proof
a) Step 1: Local–global rigidity effects. First, we prove that the set of rotation matrices which emerge from Reshetnyak’s rigidity theorem on all the connected components of \(\Omega \cap \varepsilon Y_\textrm{stiff}\) has at most two different elements.
Let \(\Omega '\Subset \Omega \), set
and recall the partition of Y into soft and stiff parts (1.2). Then, it holds that \(\Omega '\subset \bigcup _{k\in J_ \varepsilon '} \varepsilon (k+Y)\subset \Omega \) for \( \varepsilon \) sufficiently small. By Reshetnyak’s rigidity theorem, we conclude that for each \(k\in J_ \varepsilon \) there exist rotations \(S_ \varepsilon ^k, R_ \varepsilon ^k \in {{\,\textrm{SO}\,}}(2)\) such that \(\nabla u_ \varepsilon =S_ \varepsilon ^k\) on \( \varepsilon (k+Y_1)\) and \(\nabla u_ \varepsilon =R_ \varepsilon ^k\) on \( \varepsilon (k+Y_{3})\), respectively. Applying Corollary 3 a) on each rectangle \( \varepsilon (k+Y_2)\) and \( \varepsilon (k+Y_4)\) yields that \(S_ \varepsilon ^k = S_ \varepsilon ^{l}\) and \(R_ \varepsilon ^k = R_ \varepsilon ^{l}\) for all \(k, l\in J_ \varepsilon '\). Thus, \(\nabla u_ \varepsilon \) attains at most two different values, say \(S_ \varepsilon \in {{\,\textrm{SO}\,}}(2)\) on \(\Omega '\cap \varepsilon (k+Y_1)\) and \(R_ \varepsilon \in {{\,\textrm{SO}\,}}(2)\) on \(\Omega '\cap \varepsilon (k+ Y_3)\) with \(R_ \varepsilon e_1 \cdot S_ \varepsilon e_1 >0\) for all \(k\in {\mathbb {Z}}^2\).
Step 2: Characterization of the weak limit. In light of Step 1 and (2.15), we can now write \(u_ \varepsilon \vert _{\Omega '}\) in the form
where \(v_ \varepsilon :{\mathbb {R}}^2\rightarrow {\mathbb {R}}^2\) is a \( \varepsilon Y\)-periodic continuous and piecewise affine function with gradients
and \(\varphi _ \varepsilon \in W^{1, p}(\Omega ';{\mathbb {R}}^2)\) with \(\varphi _ \varepsilon = 0\) on \(\Omega '\cap \varepsilon Y_\textrm{stiff}\).
In the following, we show that
We first observe that \((\nabla \varphi _ \varepsilon )_ \varepsilon \) is bounded in \(L^p(\Omega ';{\mathbb {R}}^{2\times 2})\) since \((u_ \varepsilon )_ \varepsilon \) is weakly convergent in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\) and \(|\nabla v_ \varepsilon | = \sqrt{2}\) for every \( \varepsilon >0\) and a.e. on \(\Omega '\). Since piecewise constant functions on a grid are dense in \(L^q(\Omega ';{\mathbb {R}}^{2\times 2})\) with \(\frac{1}{p} + \frac{1}{q} =1\), it suffices to test the weak convergence with characteristic functions of squares. Hence, we set for an arbitrary open square \(Q\subset \Omega '\) the set \(Q_ \varepsilon :=\bigcup _{k\in I_ \varepsilon ^{\partial Q}} \varepsilon (k + Y_\textrm{soft})\) with \(I_ \varepsilon ^{\partial Q} = \{k\in {\mathbb {Z}}^2: \partial Q\cap \varepsilon (k+Y_\textrm{soft}) \ne \emptyset \}\), and obtain with the help of the Gauss-Green theorem and Hölder’s inequality that
In the last line, we used the fact that \(\# I_ \varepsilon ^{\partial Q} \le C \frac{1}{ \varepsilon }\) for a constant \(C>0\) independent of \( \varepsilon \), and \(| \varepsilon (k+Y_\textrm{soft})| = 2\lambda (1-\lambda ) \varepsilon ^2\). This proves the desired convergence (2.21).
We now address the the weak convergence of \((\nabla v_ \varepsilon )_ \varepsilon \). First, we find \(R,S\in {{\,\textrm{SO}\,}}(2)\) and (non-relabeled) subsequences of \((S_ \varepsilon )_ \varepsilon \) and \((R_ \varepsilon )_ \varepsilon \) such that \(S_ \varepsilon \rightarrow S\) and \(R_ \varepsilon \rightarrow R\) as \( \varepsilon \rightarrow 0\); the limits then satisfy \(Re_1 \cdot Se_1\ge 0\) since \(R_ \varepsilon e_1 \cdot S_ \varepsilon e_1 >0\) for all \( \varepsilon \). We now show that
To see this, we define for \( \varepsilon \) the auxiliary functions \(w_ \varepsilon (x) = \varepsilon w(\frac{x}{ \varepsilon })\) for \(x\in {\mathbb {R}}^2\), where \(w:{\mathbb {R}}^2\rightarrow {\mathbb {R}}^2\) is continuous and piecewise affine with the Y-periodic arrangement of gradients
It follows with the help of the Riemann–Lebesgue lemma that
in \(L^p(\Omega ;{\mathbb {R}}^{2\times 2})\). Moreover, it holds for all sufficiently small \( \varepsilon \) that
for a constant \(C>0\) independent of \(\varepsilon \) and \(\Omega '\). Combining (2.24) with (2.25) then produces (2.22).
In view of (2.19), we then obtain that
by the uniqueness of weak limits. The arbitrariness of \(\Omega '\Subset \Omega \) implies that (2.26) is true on all of \(\Omega \).
b) For the proof of the approximation result we use an explicit construction of continuous and piecewise affine functions, ensuring first the orientation preservation and (2.17). Let \(u:\Omega \rightarrow {\mathbb {R}}^2\) be affine such that
with \(S, R\in {{\,\textrm{SO}\,}}(2)\) satisfying \(Re_1 \cdot Se_1\ge 0\). If the latter is an equality, then we choose a sequence \((\hat{S}_ \varepsilon )_ \varepsilon \subset {{\,\textrm{SO}\,}}(2)\) such that \(Re_1\cdot \hat{S}_ \varepsilon e_1 >0\) and \(\hat{S}_ \varepsilon \rightarrow S\) as \( \varepsilon \rightarrow 0\). We then define the continuous and piecewise affine approximating sequence \((u_ \varepsilon )_ \varepsilon \) as

where \(v_ \varepsilon :{\mathbb {R}}^2\rightarrow {\mathbb {R}}^2\) is chosen as in (2.20) with
By design, the sequence \((u_ \varepsilon )_ \varepsilon \) has the same mean value as u, satisfies (2.17), and converges to u in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\) due to (2.22). It remains to prove that this sequence also satisfies the Ciarlet–Nečas condition on \(\Omega \) so that \((u_ \varepsilon )_ \varepsilon \subset {\mathcal {A}}\), cf. (1.1). Since each \(u_ \varepsilon \) fulfills \(\det \nabla u_ \varepsilon >0\) a.e. in \(\Omega \) this task is equivalent to establishing the injectivity of \(u_ \varepsilon \), see e.g., [48, Proposition 4.2]. As \(u_ \varepsilon \) and \(v_ \varepsilon \) differ only by a global translation, it suffices to show that \(v_ \varepsilon \) is injective. This can be seen directly by considering the explicit construction
for a suitable global translation \(d_ \varepsilon \in {\mathbb {R}}^2\), and that \(\lambda S_ \varepsilon +(1-\lambda ) R_ \varepsilon \), \((S_ \varepsilon e_1|R_ \varepsilon e_2)\), \((R_ \varepsilon e_1|S_ \varepsilon e_2)\) have positive determinants, since \(S_ \varepsilon e_1 \cdot R_ \varepsilon e_1 >0\) and
\(\square \)
Remark 2
The proof of Proposition 4 reveals two noteworthy aspects.
-
a)
Step 1 shows that at most two rotations appear periodically on \(\Omega \cap \varepsilon Y_\textrm{stiff}\). This observation is tied to the specific geometric distribution of soft and stiff parts of the unit cell. The same phenomenon is absent, for example, in the case of Kagome-lattices [7, 8].
-
b)
Step 2 and the proof of b) underscore that the material exhibits auxetic deformation behavior not only in the limit \( \varepsilon \rightarrow 0\), but also at the level of finite, non-vanishing length scale \( \varepsilon >0\).
Remark 3
(Discussion of \({\varvec{K}}\) )
-
a)
In Proposition 4, we established that weak limits of sequences in \({\mathcal {A}}\) that satisfy (2.17) are characterized by affine functions with gradient in K defined as in (1.8). In what follows, we shall prove the second identity in this equation. We first observe that
$$\begin{aligned}&{{\,\textrm{SO}\,}}(2) \subset K \subset \lambda {{\,\textrm{SO}\,}}(2) + (1-\lambda ){{\,\textrm{SO}\,}}(2) \subset \bigcup _{\mu \in [0,1]} \mu {{\,\textrm{SO}\,}}(2) + (1-\mu ) {{\,\textrm{SO}\,}}(2)\\&\quad = \{F\in {\mathbb {R}}^{2\times 2}: |Fe_1|\le 1, Fe_2=(Fe_1)^\perp \} = {{\,\textrm{SO}\,}}(2)^\textrm{c}, \end{aligned}$$which shows that every \(F\in K\) is a conformal contraction. Furthermore, the set can be simplified to
$$\begin{aligned} K = \{\alpha Q: |Y_{\textrm{stiff}}|\le \alpha ^2\le 1, Q\in {{\,\textrm{SO}\,}}(2)\}, \end{aligned}$$since for every \(R,S\in {{\,\textrm{SO}\,}}(2)\) with \(Se_1\cdot Re_1\ge 0\) it holds that
$$\begin{aligned} \det (\lambda S + (1-\lambda ) R) = |Y_{\textrm{stiff}}| + |Y_\textrm{soft}|Se_1 \cdot Re_1 \ge |Y_{\textrm{stiff}}|. \end{aligned}$$(2.29) -
b)
The Poisson’s ratio \(\nu \) corresponding to every non-trivial affine deformation with gradient \(\alpha Q\) for \(\sqrt{|Y_{\textrm{stiff}}|}\le \alpha < 1\) and \(Q\in {{\,\textrm{SO}\,}}(2)\) satisfies
$$\begin{aligned} \nu = - \frac{\alpha - 1}{\alpha - 1} = -1. \end{aligned}$$This is a confirmation of the calculations in [9, 21] via a variational perspective.
2.3 Homogenization
Now that the set of admissible limit deformations in the fully rigid setting is characterized, we are in the position to prove a corresponding \(\Gamma \)-convergence result. Here, we consider energy functionals of integral type with integrand \(W_ \varepsilon \) as in (1.6) with \(W_\textrm{soft}\) as in (1.4) and \(W_\mathrm{stiff, \varepsilon }\) replaced by (1.10). Note that in this scenario \(W_ \varepsilon \) does, in fact, not depend on \( \varepsilon \), which is why we write W instead of \(W_ \varepsilon \) throughout this section.
Theorem 5
(Homogenization of rigid checkerboard structures) Let \(\Omega \subset {\mathbb {R}}^2\) be a bounded Lipschitz domain, \(p \ge 2\), and let \({\mathcal {I}}_ \varepsilon \) for \( \varepsilon >0\) be as in (1.5), (1.1), and (1.6) with \(W_\mathrm{stiff, \varepsilon }\) replaced by (1.10) and \(W_\textrm{soft}\) as in (1.4) such that \(W_\textrm{soft}^\textrm{qc}\) is polyconvex. Then, the family of functionals \(({\mathcal {I}}_ \varepsilon )_ \varepsilon \) \(\Gamma \)-converges for \( \varepsilon \rightarrow 0\) with respect to the strong \(L^p(\Omega ;{\mathbb {R}}^2)\)-topology to \({\mathcal {I}}_\textrm{hom}\) as in (1.7)–(1.9).
Moreover, any sequence \((u_ \varepsilon )_ \varepsilon \subset L^p_0(\Omega ;{\mathbb {R}}^2)\) with \(\sup _{ \varepsilon }{\mathcal {I}}_ \varepsilon (u_ \varepsilon )<\infty \) has a subsequence that converges weakly in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\) to some affine function \(u:\Omega \rightarrow {\mathbb {R}}^2\) with vanishing mean value and \(\nabla u\in K\), cf. (1.8).
Proof
Step 1: The lower bound. Let \((u_ \varepsilon )_ \varepsilon \subset L^p_0(\Omega ;{\mathbb {R}}^2)\) be strongly convergent with limit \(u\in L^p_0(\Omega ;{\mathbb {R}}^2)\) and
In particular, it holds that \((u_ \varepsilon )_ \varepsilon \subset {\mathcal {A}}\), the sequence satisfies (2.17), and has a (non-relabeled) subsequence with \(u_ \varepsilon \rightharpoonup u\) in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\) for some \(u\in W^{1,p}(\Omega ;{\mathbb {R}}^2)\) due to (1.4) and the specific choice (1.10) for \(W_\textrm{rig}\). In view of Proposition 4 a), we find that u is affine with \(\nabla u=F\in K\).
To show the liminf-inequality, let \(\Omega '\Subset \Omega \) be an arbitrary subset and let \( \varepsilon \) be sufficiently small. Exploiting the non-negativity of \(W_\textrm{soft}\), the splitting (2.19) together with (2.20), and the fact that \(W^\textrm{qc}\) is \(W^{1,p}\)-quasiconvex as a polyconvex function (see [49, Lemma 2.5]) then produce
where \(J_ \varepsilon '\) is taken as in (2.18); recall also that \(\varphi _ \varepsilon \in W^{1,p}_0( \varepsilon (k+Y_i);{\mathbb {R}}^2)\) for \(i\in \{2,4\}\) and every \(k\in J_ \varepsilon '\).
Now, let \(S, R\in {{\,\textrm{SO}\,}}(2)\) be the limits of \((S_ \varepsilon )_ \varepsilon \) and \((R_ \varepsilon )_ \varepsilon \) (up to a subsequence) as in the proof of Proposition 4 a), respectively. Since \(W^{\textrm{qc}}\) is polyconvex and therefore lower semicontinuous by definition, we may pass to the limit \(\varepsilon \rightarrow 0\) and obtain
Upon taking the supremum over all compactly contained \(\Omega '\Subset \Omega \), we obtain the desired lower bound.
Step 2: The upper bound. The idea is to use the approximating sequence of Proposition 4 b) and augment it with a suitable perturbation on the softer part to enforce optimal energy. Preserving orientation during this construction requires a subtle construction due to Conti and Dolzmann [40].
To be precise, let u be affine with \(\nabla u=F\in K\) and choose the energetically optimal \(R,S\in {{\,\textrm{SO}\,}}(2)\) with \(Re_1\cdot Se_1\ge 0\) such that \(F=\lambda S+(1-\lambda )R\), and for \( \varepsilon >0\) let \(u_ \varepsilon :{\mathbb {R}}^2\rightarrow {\mathbb {R}}^2\) as in (2.27), see also (2.28) and (2.20). For any \( \varepsilon \) and \(k\in {\mathbb {R}}^2\), let \((\hat{u}^k_{ \varepsilon ,j})_j\subset W^{1,p}( \varepsilon (k + Y_2);{\mathbb {R}}^2)\) be the orientation preserving sequences as in [40, Theorem 2.1] such that
as well as
Analogously, we introduce \((\check{u}^k_{ \varepsilon ,j})_j\subset W^{1,p}( \varepsilon k + \varepsilon Y_4;{\mathbb {R}}^2)\).
Let \(\widetilde{\Omega }\subset {\mathbb {R}}^2\) an open set with \(\Omega \Subset \widetilde{\Omega }\), and let \(\tilde{J}_ \varepsilon =\{k\in {\mathbb {R}}^2: \varepsilon (k+Y)\subset \widetilde{\Omega }\}\). For sufficiently small \( \varepsilon >0\), it then holds that
and we define for \(j\in {\mathbb {N}}\) the functions
Each \(u_{ \varepsilon ,j}\) is, by design, orientation preserving, and \(u_{ \varepsilon ,j}\rightharpoonup u_ \varepsilon \) in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\). Moreover, every \(u_{ \varepsilon ,j}\) satisfies the Ciarlet–Nečas condition (CN) on every subset of \({\mathbb {R}}^2\) since \(u_ \varepsilon \in {\mathcal {A}}\) and the perturbations \(\hat{u}_{ \varepsilon ,j}^k, \check{u}^k_{ \varepsilon ,j}\) have a positive determinant and coincide with \(u_ \varepsilon \) on the boundary of the soft parts. In light of [35, Theorem 1], the functions \(u_{ \varepsilon ,j}\) are globally injective and thus satisfy (CN) on every subset of \({\mathbb {R}}^2\), cf. [48, Proposition 4.2].
Now, combining (2.31) with the non-negativity of \(W_\textrm{soft}\), \(W_\textrm{rig}=0\) on \({{\,\textrm{SO}\,}}(2)\), with (2.30) produces the energy estimate
and hence
Finally, we exploit that this estimate holds for arbitrary \(\widetilde{\Omega }\Supset \Omega \), and we use a diagonalization argument to select a diagonal sequence \((\bar{u}_ \varepsilon )_ \varepsilon \) with \(\bar{u}_ \varepsilon =u_{ \varepsilon ,j( \varepsilon )}\) such that
and \(\bar{u}_ \varepsilon \rightharpoonup u\) in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\). Note that the uniform bounds (with respect to the index parameters) of \(u_{ \varepsilon ,j}\) are obtained via the coercivity of \(W_\textrm{soft}\) as in (1.4) and the triviality of \(W_\textrm{rig}\) defined in (1.10). \(\square \)
Remark 4
(Properties of \({{W_\textrm{hom}}}\) )
-
a)
The representation of \(F\in K\) into \(F=\lambda S + (1-\lambda )R\) for \(R,S\in {{\,\textrm{SO}\,}}(2)\) with \(Re_1\cdot Se_1\ge 0\) is not unique. A direct calculation based on the intersection of two circles with radii \(\lambda \) and \(1-\lambda \) shows that
$$\begin{aligned} Se_1 =&\frac{1}{2\lambda |Fe_1|^2}\big ((|Fe_1|^2 + 2\lambda -1)Fe_1\\&\pm \sqrt{4\lambda ^2|Fe_1|^2 - (|Fe_1|^2 + 2\lambda - 1)^2}Fe_2\big ) \end{aligned}$$and \(Re_1=\frac{1}{1-\lambda }(Fe_1 - \lambda Se_1)\).
In fact, there exist exactly two choices for R and S if \(|Fe_1|<1\), and the representation is unique if \(|Fe_1|=1\). For \(\lambda =\frac{1}{2}\), this formula reduces to
$$\begin{aligned} Se_1 = Fe_1 \pm \frac{\sqrt{1-|Fe_1|^2}}{|Fe_1|} Fe_2\quad \text {and}\quad Re_1 = Fe_1 \mp \frac{\sqrt{1-|Fe_1|^2}}{|Fe_1|}Fe_2. \end{aligned}$$(2.32) -
b)
Note that if \(W_\textrm{soft}\) is frame-indifferent or isotropic, i.e., \(W_\textrm{soft}(QF)=W_\textrm{soft}(F)\) or \(W_\textrm{soft}(FQ)=W_\textrm{soft}(F)\) for all \(F\in {\mathbb {R}}^{2\times 2}\) and \(Q\in {{\,\textrm{SO}\,}}(2)\), then it is immediate that the quasiconvex envelope \(W_\textrm{soft}^\textrm{qc}\) (cf. (1.14)) is frame-indifferent or isotropic as well.
In case \(W_\textrm{soft}\) has one of these two properties then the limit density simplifies to
$$\begin{aligned} W_\textrm{hom}(F)=W_\textrm{hom}( |Fe_1|{{\,\textrm{Id}\,}}) \end{aligned}$$for \(F\in K\). Moreover, if \(W_\textrm{soft}\) is both frame-indifferent and isotropic, then
$$\begin{aligned} W_\textrm{hom}(F) = |Y_\textrm{soft}|\min _{R, S\in {{\,\textrm{SO}\,}}(2), \lambda S+(1-\lambda )R=|Fe_1|{{\,\textrm{Id}\,}}, Re_1\cdot Se_1\ge 0}W_\textrm{soft}^\textrm{qc}(Se_1|Re_2), \end{aligned}$$since \((Re_1|Se_2) = R_{-\frac{\pi }{2}}(Se_1|Re_2)R_{\frac{\pi }{2}}\), where \(R_\theta \in {{\,\textrm{SO}\,}}(2)\) describes a rotation matrix by the angle \(\theta \in {\mathbb {R}}\). The expression on the right-hand side reduces even further in the case \(\lambda =\frac{1}{2}\), where we obtain the explicit formula
$$\begin{aligned} W_\textrm{hom}(F) = |Y_\textrm{soft}|W_\textrm{soft}^\textrm{qc}\big (\big (|Fe_1|+ \sqrt{1-|Fe_1|^2}\big ){{\,\textrm{Id}\,}}\big ) \end{aligned}$$with the help of (2.32).
Remark 5
(Comparison with cell formula) Homogenization for integral-type functionals commonly gives rise to homogenized integrands that are defined by a (multi-)cell formula [24, 25]. In this remark, we explicitly compute the (multi-)cell formula corresponding to W and compare the result with \(W_\textrm{hom}\) as in (1.9).
In the following, we consider the density
taken from [25, Equation (1.7)], and prove that
We shall point out that Theorem 5 also holds if the Ciarlet–Nečas condition is dropped, see Remark 6 a) later on. The identity (2.34) shows, in particular, that the two densities \(W_\textrm{cell}\) and \(W_\textrm{hom}\) coincide on \(K\setminus \sqrt{|Y_{\textrm{stiff}}|}{{\,\textrm{SO}\,}}(2)\), but differ on \(\sqrt{|Y_{\textrm{stiff}}|}{{\,\textrm{SO}\,}}(2)\). This observation stands in contrast to other homogenization results in the context of asymptotic rigidity, see [30, Sect. 6] and [31, Remark 5.5], where the homogenized density and the cell formula coincide everywhere.
To prove (2.34), let \(F\in {\mathbb {R}}^{2\times 2}\) such that \(W_\textrm{cell}(F)<\infty \), which implies that there exist \(\psi \in W^{1,p}_{\#}(Y;{\mathbb {R}}^2)\) and \(S, R \in {{\,\textrm{SO}\,}}(2)\) such that
By exploiting the periodicity of the boundary values of \(\psi \), we can apply Corollary 3 a) to \(u(x)=Fx+\psi (x)\) for \(x\in Y_2\), which produces
with \(\varphi _2\in W_0^{1,p}(Y_2;{\mathbb {R}}^2)\), and \(Se_1\cdot Re_1>0\). Similarly, we find \(\varphi _4\in W_0^{1,p}(Y_4;{\mathbb {R}}^2)\) such that \(F+\nabla \psi = (Re_1| Se_2) + \nabla \varphi _4\) on \(Y_4\).
By choosing \(\hat{\psi }=\psi -\varphi _2-\varphi _4\in W^{1,p}_{\#}(\Omega ;{\mathbb {R}}^2)\), we obtain that
Then the periodicity of \(\hat{\psi }\) yields that
and hence, \(Fe_1=\lambda Se_1 + (1-\lambda ) Re_1\). Similarly, one can show that \(Fe_2=\lambda Se_2 + (1-\lambda ) Re_2\), which implies that \(F\in K {\setminus } \sqrt{|Y_{\textrm{stiff}}|}{{\,\textrm{SO}\,}}(2)\) since \(Se_1\cdot Re_1>0\).
It remains to compare the values of the two functions in (2.33) and (2.34) for \(F\in K{\setminus } \sqrt{|Y_{\textrm{stiff}}|}{{\,\textrm{SO}\,}}(2)\). Indeed, let \(F=\lambda S + (1-\lambda )R\) for \(S, R\in {{\,\textrm{SO}\,}}(2)\) with \(Se_1\cdot Re_1 > 0\) and \(W_\textrm{hom}(F)=W_\textrm{soft}^\textrm{qc}(Se_1|Re_2) + W_\textrm{soft}^\textrm{qc}(Re_1|Se_2)\), then the previous calculations show that

This concludes the proof of (2.34). The results presented above dot not change if \(W_\textrm{cell}\) is replaced by the multi-cell formula

cf. [25, Equation (2.7)].
2.4 Discussion of the Assumptions
In this chapter, we present a critical discussion of the necessity of several model assumptions made in Sect. 2. First, we address the set of admissible functions \({\mathcal {A}}\), cf. (1.1), which consists of all Sobolev functions satisfying the Ciarlet–Nečas condition (CN) and orientation preservation. While the macroscopic deformation behavior stays intact when dropping either of the two assumptions, see Remark 6 a) and b), the material can undergo infinite compression if both conditions are dropped, see Proposition 6. Second, we prove that the elastic material becomes much more flexible in the case \(p<2\) due to the occurrence of microfractures at the hinges. This section is then concluded with two final remarks about the geometric setup of the model: the porous case and the case of rigid rectangles.
Remark 6
(Orientation preservation and Ciarlet–Nečas)
-
a)
Theorem 5 and Proposition 4 remain true if the Ciarlet–Nečas condition (CN) on \(\Omega \) in the definition of \({\mathcal {A}}\), see (1.1), is dropped. Indeed, the compactness and lower bound do not require non-interpenetration of matter at all, while the recovery sequences sequence designed in Proposition 4 b) and in Step 2 of the proof of Theorem 5 satisfy this constraint automatically.
-
b)
For \(p>2\) we shall also point out that Proposition 4 is true if the orientation preservation \(\det \nabla u>0\) a.e. in \(\Omega \) is dropped instead of the Ciarlet-Nečas condition (3.21) on \(\Omega \). In fact, we merely need to replace Corollary 3 by a variant that also considers the full neighboring stiff squares, see Proposition 10 later in Sect. 3. The result essentially stays the same with the minor adjustment, that the rotations \(S,R\in {{\,\textrm{SO}\,}}(2)\) in Corollary 3 a) satisfy \(Se_1\cdot Re_1 \ge 0\) instead of \(Se_1\cdot Re_1 >0\).
-
c)
Exchanging the constraint of orientation preservation \(\det \nabla u>0\) a.e. in \(\Omega \) in the definitions of \({\mathcal {A}}\) and \(W_\textrm{soft}\), cf. (1.1) and (1.4), by incompressibility, that is,
$$\begin{aligned} \det \nabla u =1 \ \text {a.e. in } \Omega , \end{aligned}$$results in a fully rigid limit set and a trivial \(\Gamma \)-limit. Precisely, the energy sequence \(({\mathcal {I}}_ \varepsilon )_ \varepsilon \) \(\Gamma \)-converges with respect to the strong topology in \(L^p_0(\Omega ;{\mathbb {R}}^2)\) to
$$\begin{aligned} {\mathcal {I}}_\textrm{hom}: L^p_0(\Omega ;{\mathbb {R}}^2) \rightarrow [0,\infty ],\ u\mapsto {\left\{ \begin{array}{ll} 0 &{} \text {if } \nabla u=R\in {{\,\textrm{SO}\,}}(2),\\ \infty &{} \text {otherwise.} \end{array}\right. } \end{aligned}$$This is a direct consequence of Corollary 3 b) and the proof of Proposition 4 a). In fact, for any sequence \((u_ \varepsilon )_ \varepsilon \) of bounded energy there is \(R\in {{\,\textrm{SO}\,}}(2)\) such that \(\nabla u_ \varepsilon \rightharpoonup \lambda R+(1-\lambda )R =R\). As for the energetic adjustment of the approximating sequence in Proposition 4 b), we invoke [40, Theorem 2.4] instead of Theorem [40, Theorem 2.1].
As discussed in Remark 6 a) and b), the macroscopic deformation behavior (see Proposition 4) still holds true if either the Ciarlet-Nečas condition (CN) or the orientation preservation is dropped. We shall now discuss the scenario where all functions in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\) are admissible. In this setting, the set of admissible limit deformations can become larger, even allowing for infinite conformal compression, as the following result proves:
Proposition 6
Let \(\lambda =\tfrac{1}{2}\) and \(p\ge 2\).
-
a)
If \((u_ \varepsilon )_ \varepsilon \subset W^{1,p}(\Omega ;{\mathbb {R}}^2)\) converges weakly in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\) to some \(u\in W^{1,p}(\Omega ;{\mathbb {R}}^2)\), and satisfies the inhomogeneous constraint (2.17), then u is affine with
$$\begin{aligned}&\nabla u\in \lambda {{\,\textrm{SO}\,}}(2) + (1-\lambda ){{\,\textrm{SO}\,}}(2)\nonumber \\&\quad = \{\alpha Q: 0=|Y_{\textrm{stiff}}| - |Y_\textrm{soft}|\le \alpha \le 1,\, Q\in {{\,\textrm{SO}\,}}(2)\}. \end{aligned}$$(2.35) -
b)
For every affine \(u:\Omega \rightarrow {\mathbb {R}}^2\) with gradient in \(\lambda {{\,\textrm{SO}\,}}(2) + (1-\lambda ){{\,\textrm{SO}\,}}(2)\) there exists a sequence of piecewise affine functions \((u_ \varepsilon )_ \varepsilon \subset W^{1,p}(\Omega ;{\mathbb {R}}^2)\) satisfying (2.17) and \(\int _\Omega u_ \varepsilon \,{\textrm{d}}{x} = \int _\Omega u\,{\textrm{d}}{x}\) such that \(u_ \varepsilon \rightharpoonup u\) in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\).

Possible configurations of rotation matrices arranged around a square for \(\lambda =\frac{1}{2}\)
Proof
a) Let \(\Omega '\Subset \Omega \) be arbitrary. For the characterization of limit deformations, one needs to understand the large scale compatibilities between the basic building blocks resulting from the proof of Lemma 2. The latter can be classified in three classes:

see Fig. 5 (rotations listed in clockwise direction, starting at the bottom).
Hence, we have that for any \( \varepsilon (k+Y_2)\) and \( \varepsilon (k+Y_4)\) with \(k\in J_ \varepsilon '\) (see (2.18)), that \(\nabla u_ \varepsilon \) restricted to \( \varepsilon (k+Y)\) fits in one of the three scenarios described above, where \([k+Y_2:i]\) means that the rotations on neighboring squares of \( \varepsilon (k+Y_2)\) behave like  for \(i\in \{1,2,3\}\), and analogously for \([k+Y_4:i]\) on \( \varepsilon (k+Y_4)\). In the following, we use the notation \(S_ \varepsilon ^k, R_ \varepsilon ^k\) for the rotation matrices satisfying \(\nabla u_ \varepsilon = R_ \varepsilon ^k\) on \( \varepsilon (k+Y_3)\) and \(\nabla u_ \varepsilon = S_ \varepsilon ^k\) on \( \varepsilon (k+Y_1)\), respectively.
for \(i\in \{1,2,3\}\), and analogously for \([k+Y_4:i]\) on \( \varepsilon (k+Y_4)\). In the following, we use the notation \(S_ \varepsilon ^k, R_ \varepsilon ^k\) for the rotation matrices satisfying \(\nabla u_ \varepsilon = R_ \varepsilon ^k\) on \( \varepsilon (k+Y_3)\) and \(\nabla u_ \varepsilon = S_ \varepsilon ^k\) on \( \varepsilon (k+Y_1)\), respectively.
-
Class I: \([k+Y_2:1]\) & \([k+Y_4:1]\). In this case, \(S_ \varepsilon ^{k} = S_{ \varepsilon }^{k+e_1} = S_{ \varepsilon }^{k+e_2}\) and \(R_ \varepsilon ^{k} = R_ \varepsilon ^{k-e_1} = R_ \varepsilon ^{k-e_2}\).
-
Class II: \([k+Y_2:1]\) & \([k+Y_4:2]\), \([k+Y_2:2]\) & \([k+Y_4:1]\), \([k+Y_2:3]\) & \([k+Y_4:1]\), \([k+Y_2:1]\) & \([k+Y_4:3]\), \([k+Y_2:2]\) & \([k+Y_4:3]\), \([k+Y_2:3]\) & \([k+Y_4:2]\).
In the following, we provide a detailed explanation of the first of the above-mentioned cases. All other scenarios can be handled analogously. We assume that \([k+Y_2:1]\) & \([k+Y_4:2]\), i.e.,
$$\begin{aligned} R_ \varepsilon ^{k-e_2} = (S_ \varepsilon ^k)^\perp \quad \text {and}\quad S_ \varepsilon ^{k+e_1} = -(R_ \varepsilon ^k)^\perp , \end{aligned}$$(2.36)and perform a case study. Suppose first that \([k-e_2+Y_2:1]\), then the first equation in (2.36) produces
$$\begin{aligned} S_ \varepsilon ^{k-e_2} = S_{ \varepsilon }^k = S_ \varepsilon ^{k+e_2}\quad \text {and}\quad R_ \varepsilon ^{k-(1,1)} = R_ \varepsilon ^{k-e_2} = (S_ \varepsilon ^{k})^\perp . \end{aligned}$$(2.37)If \([k-e_1+Y_4:1]\), we derive from (2.36) and (2.37) the equations
$$\begin{aligned} (S_ \varepsilon ^{k})^\perp = R_ \varepsilon ^k = R_ \varepsilon ^{k-e_1} = R_ \varepsilon ^{k-(1,1)} = R_ \varepsilon ^{k-e_2} \quad \text {and}\quad (-R_ \varepsilon ^k)^\perp = S_ \varepsilon ^{k} = S_ \varepsilon ^{k+e_2} = S_ \varepsilon ^{k-e_2}. \end{aligned}$$(2.38)In the case \([k-e_1+Y_4:2]\) the identities in (2.38) also hold true. In these two cases, we obtain the class I case \([k+Y_2:1]\) & \([k+Y_4:1]\) with \(R_ \varepsilon ^k = (S_ \varepsilon ^k)^\perp \). If \([k-e_1+Y_4:3]\), then (2.37) yields that
$$\begin{aligned} S_ \varepsilon ^k = (R_ \varepsilon ^{k-(1,1)})^\perp = ((S_ \varepsilon ^{k})^\perp )^\perp = -S_ \varepsilon ^k, \end{aligned}$$which is a contradiction. Suppose, secondly, that \([k-e_2+Y_2:2]\). Then (2.37) generates the next contradiction,
$$\begin{aligned} S_ \varepsilon ^k = (R_ \varepsilon ^{k-(1,1)})^\perp = ((S_ \varepsilon ^k)^\perp )^\perp = - S. \end{aligned}$$Finally, assuming that \([k-e_2+Y_2:3]\), it holds that
$$\begin{aligned} R_ \varepsilon ^{k-(1,1)} = (S_ \varepsilon ^k)^\perp \quad \text {and}\quad S_ \varepsilon ^{k-e_2} = - (R_ \varepsilon ^{k-e_2})^\perp , \end{aligned}$$which we combine with (2.36) to produce (2.38) again, since \([k-e_1+Y_2:1]\) is automatically satisfied.
All the other scenarios mentioned above can be handled analogously and reduced to the special case of class I with one of the two additional relations \(S_ \varepsilon ^k = (R_ \varepsilon ^k)^{\perp }\) or \(R_ \varepsilon ^k=(S_ \varepsilon ^k)^{\perp }\).
-
Class III: \([k+Y_2:2]\) & \([k+Y_4:2]\), \([k+Y_2:3]\) & \([k+Y_4:3]\). Here, checking the different combinations of
 for the restriction of \(u_ \varepsilon \) to \( \varepsilon (k - e_2 +Y_2)\) and \( \varepsilon (k-e_1+Y_4)\) yields a contradiction in each case.
for the restriction of \(u_ \varepsilon \) to \( \varepsilon (k - e_2 +Y_2)\) and \( \varepsilon (k-e_1+Y_4)\) yields a contradiction in each case.
 for the restriction of
for the restriction of In summary, the only relevant class to consider is class I, and applying the implications for any \(k\in J_ \varepsilon '\) yields that \(S_ \varepsilon ^k =S_ \varepsilon \) and \(R_ \varepsilon ^k=R_ \varepsilon \) for all \(k\in J_ \varepsilon '\) and suitable \(S_ \varepsilon , R_ \varepsilon \in {{\,\textrm{SO}\,}}(2)\). We can now proceed as in Step 2 of the proof of Proposition 4 a).
The identity in (2.35) can be shown as in (2.29) considering that \(Se_1 \cdot Re_1 \in [-1,1]\) for any \(S,R\in {{\,\textrm{SO}\,}}(2)\).
b) Since we merely need to recover affine functions with gradient in \(\lambda {{\,\textrm{SO}\,}}(2) + (1-\lambda ){{\,\textrm{SO}\,}}(2)\), the proof is almost identical with that of Proposition 4 b). The only difference is that we can omit the scalar product \(S_ \varepsilon e_1 \cdot R_ \varepsilon e_1>0\) since it does not appear in this context without orientation preservation. \(\square \)
Whereas the deformations in the case \(p \ge 2\) are strongly restricted, one observes, in accordance with intuition, much softer material behavior, as soon as microfracture in the form of discontinuities in the joints occur. For this next proposition, we require a suitable extension result, which we state and prove directly after.
Proposition 7
(Affine limit deformations for \({{p<2}}\)) Let \(1<p<2\), then any affine map \(u:\Omega \rightarrow {\mathbb {R}}^2\) can be approximated weakly in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\) by a sequence \((u_ \varepsilon )_ \varepsilon \subset W^{1,p}(\Omega ;{\mathbb {R}}^2)\) in such a way that \(\int _{\Omega } u_ \varepsilon \,{\textrm{d}}{x}=\int _\Omega u\,{\textrm{d}}{x}\) and

An illustration of the microcracks induced by the deformation v as in (2.39) for \(F=2{{\,\textrm{Id}\,}}\) and \(\lambda =\frac{1}{2}\). The stiff components (and their image) are colored in grey
Proof
Let \(\nabla u=F\) with \(F\in {\mathbb {R}}^{2\times 2}\). The idea is to work here with a classical Sobolev extension result [46, Lemma 2.5], bearing in mind that in contrast to [51, Theorem 2.1], the functions we wish to extend are defined on different connected components, which makes a pure estimate of the gradients impossible. First, we define v on the stiff components via
for some \(k\in {\mathbb {Z}}^2\), see e.g., Fig. 6.
Let \(\tilde{\Omega }\Supset \Omega \) be an open set covering \(\Omega \) and let \(L: W^{1,p}(\tilde{\Omega }\cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)\rightarrow W^{1,p}(\Omega ;{\mathbb {R}}^2)\) be the operator from Lemma 8 for \(U=\tilde{\Omega }\) and \(U'=\Omega \). For \( \varepsilon >0\), let us then define the Sobolev function

which satisfies \(\nabla u_ \varepsilon = \nabla \big (L(v)\big )(\frac{\cdot }{ \varepsilon }) = {{\,\textrm{Id}\,}}\in {{\,\textrm{SO}\,}}(2)\) a.e. in \(\Omega \cap \varepsilon Y_\textrm{stiff}\) by design. Moreover, Riemann–Lebesgue’s Lemma yields that
where the last two integrals can be calculated using Gauß-Green’s theorem,
where \(\nu \) denotes the outer unit normal, cf. also Fig. 7 for the boundary values of v in the sense of traces. Hence, the weak limit in (2.40) is F. With Poincaré’s inequality in mind, we then finally conclude that \(u_ \varepsilon \rightharpoonup u\) in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\), as desired. \(\square \)

This next lemma is needed to prove Proposition 7 and derive suitable energy estimates later in Sect. 3.3.
Lemma 8
(Extension result for checkerboard structures) Let \(U'\Subset U\subset {\mathbb {R}}^2\) be bounded open sets and \( \varepsilon >0\) sufficiently small.
-
a)
If \(p>2\), then there is a linear operator \(L: W^{1,p}(U\cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)\cap C^0(\overline{U\cap \varepsilon Y_\textrm{stiff}};{\mathbb {R}}^2) \rightarrow W^{1,p}(U';{\mathbb {R}}^2)\) such that \(L u = u\) a.e. in \(U'\cap \varepsilon Y_\textrm{stiff}\) and
$$\begin{aligned} \Vert L u\Vert _{W^{1,p}(U';{\mathbb {R}}^2)} \le C\Vert u\Vert _{W^{1,p}(U\cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)} \end{aligned}$$for a constant \(C>0\) independent of \( \varepsilon ,U',U\), and for every \(u\in W^{1,p}(U\cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)\cap C^0(\overline{U\cap \varepsilon Y_\textrm{stiff}};{\mathbb {R}}^2)\).
-
b)
If \(p\in (1,2)\), then the operator L in a) is defined on all of \(W^{1,p}(U\cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)\).
Proof
We first cover the continuous case \(p>2\).
Step 1: A preliminary construction on the first unit cell. We set Z to be the union of Y and its eight neighbors, i.e.,
we analogously set \(Z_\textrm{stiff}\) as the union of \(Y_{\textrm{stiff}}\) and the stiff components all its eight neighboring cells. Moreover, consider the space
where \(g_0 = g_4\), and \(\Gamma _1,\ldots ,\Gamma _4\subset \partial Y_2\) are the four straight boundary pieces of the polygon \(Y_2\) and \(x_i\in \partial Y_2\) are the four vertices of \(Y_2\), all numbered clockwise, starting in the lower left corner. The space B is exactly the trace space of \(Y_2\) as can be seen in [47, Theorem 1.5.2.3 b)]. Let \(T: W^{1,p}(Y_2;{\mathbb {R}}^2)\rightarrow B\) be the trace operator on the domain \(Y_2\) and let
be the projections of the trace operators of the neighboring stiff components onto \(\Gamma _1,\ldots ,\Gamma _4\). In light of [52, Theorem 4.2], there exists a linear and continuous right inverse S of T. By composing S with \((T_1,\ldots ,T_4)\) and arguing similarly on \(Y_4\), we find a linear and continuous operator \(L^{(1)}: W^{1,p}(Z_\textrm{stiff};{\mathbb {R}}^2)\cap C^0(\overline{Z_\textrm{stiff}};{\mathbb {R}}^2)\rightarrow W^{1,p}(Y;{\mathbb {R}}^2)\) such that \(L^{(1)} u = u\) a.e. in \(Y_{\textrm{stiff}}\) and
for every \(u\in W^{1,p}(U\cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)\).
Step 2: Extension on large domains. Now, let \(V'\Subset V\subset {\mathbb {R}}^2\) and \( \varepsilon \) sufficiently small. Then, there exists an operator
such that \(L^{(2)} u = u\) a.e. in \(V'\cap Y_{\textrm{stiff}}\) and
where \(Y_{\textrm{stiff}}\) now denotes the Y-periodic extension in this step. Indeed, with \(J'=\{k\in {\mathbb {Z}}: V'\cap (k+Y) \ne \emptyset \}\) we obtain
which then allows us to work cell-wise. With \(\pi ^\xi (x):= x+\xi \) for \(x,\xi \in {\mathbb {R}}^2\), we find for fixed \(k\in J\) and \(u\in W^{1,p}(V\cap Y_{\textrm{stiff}})\cap C^0(\overline{V\cap Y_{\textrm{stiff}}};{\mathbb {R}}^2)\) the function
with \(L^{(1)}\) as in Step 2. Since \(u_k=u\) on \(k+Z_\textrm{stiff}\), we obtain that
is well-defined and satisfies \(L^{(2)}u=u\) on \(V'\cap Y_{\textrm{stiff}}\). On each \(k+Y\), it holds that
Summing this estimate over all \(k\in J'\) and exploiting (2.45) then yields (2.44).n
Step 3: Scaling analysis. The desired extension operator follows immediately from a scaling analysis as in the first step of the proof of [46, Theorem 2.1].
Step 4: To obtain the desired result for \(p\in (1,2)\), we merely need to add the fact that the trace space B corresponding to \(Y_2\) as in (2.43) is now simply
in light of [47, Theorem 1.5.2.3 a)]; one works analogously on \(Y_4\). Omitting the intersection with a suitable space of continuous functions, the rest of the proof can be handled exactly as in the three steps before. \(\square \)
Remark 7
(Porous checkerboard structures) So far, we have dealt with checkerboard structures composed of elastically stiff squares \( \varepsilon Y_\textrm{stiff}\) and soft rectangles \( \varepsilon Y_\textrm{soft}\), so that the entire reference configuration \(\Omega \) consists of an elastic material. While this model is relevant, for example, in the production of waterproof or airtight auxetic materials, the porous counterpart, where \( \varepsilon Y_\textrm{soft}\) is replaced by void, is also of significance.
To model this scenario, we choose a bounded Lipschitz domain \(\Omega '\Subset \Omega \) and work with energies defined on the set \({\mathcal {A}}_ \varepsilon \) of all functions \(u\in W^{1,p}(\Omega \cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)\cap C^0(\overline{\Omega \cap \varepsilon Y_\textrm{stiff}};{\mathbb {R}}^2)\) with \(\int _{\Omega '\cap \varepsilon Y_\textrm{stiff}} u \,{\textrm{d}}x =0\) and \(\Vert u\Vert _{L^p(\Omega \cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)}\le M\Vert u\Vert _{L^p(\Omega '\cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)}\) for a fixed constant \(M>0\); the latter condition serves to avoid concentration effects near the boundary of \(\Omega \). Precisely, the energies are defined as
with \(W_\textrm{rig}\) as in (1.10) and \(p>2\). Since \({\mathcal {I}}_ \varepsilon \) is defined on \( \varepsilon \)-dependent spaces, it is necessary to explain the underlying topology of a corresponding \(\Gamma \)-convergence (and compactness) result. In light of Lemma 8, every \(u\in {\mathcal {A}}\) can be extended to a function Lu in \(W^{1,p}(\Omega ';{\mathbb {R}}^2)\) with estimates of the \(W^{1,p}\)-norms, which allows us to use the weak topology in \(W^{1,p}(\Omega ';{\mathbb {R}}^2)\) for the \(\Gamma \)-convergence of \(({\mathcal {I}}_ \varepsilon )_ \varepsilon \). In particular, we say that a sequence \((u_ \varepsilon )_ \varepsilon \) with \(u_ \varepsilon \in {\mathcal {A}}_ \varepsilon \) converges to \(u\in W^{1,p}(\Omega ';{\mathbb {R}}^2)\) in \(W^{1,p}(\Omega ';{\mathbb {R}}^2)\) if the sequence \((Lu_ \varepsilon )_ \varepsilon \subset W^{1,p}(\Omega ';{\mathbb {R}}^2)\) does so.
With this notion of convergence, it is straightforward to show that \(({\mathcal {I}}_ \varepsilon )_ \varepsilon \) \(\Gamma \)-converges to the constant zero function defined on the set of all affine deformations with vanishing mean value and gradient in K, cf. (1.8), considering that compactness follows in view of the continuity of L the Poincaré’s inequality as in Lemma 12 below.
Remark 8
(Checkerboard structures with rigid rectangles) By an analogous argumentation as in the proofs of Proposition 4, periodic high-contrast geometries with stiff parts consisting of rectangles can be handled as well. In this situation, we set
for given \(\lambda ,\mu \in (0,1)\). Instead of the weak limit (2.24), we now obtain
This yields that admissible limit deformations are affine with gradient in
For every \(R,S\in {{\,\textrm{SO}\,}}(2)\) with \(Re_1\cdot Se_1 \ge 0\), we have
as well as
but
Hence, \(F \in K\) is not necessarily a conformal contraction any more but the Poisson’s ratio corresponding to F is still negative.
3 Analysis of the Model with Stiff Tiles
3.1 Technical Tools
We begin the analysis of the model with diverging elastic energy by establishing a replacement for the local results Lemma 2 and Corollary 3. In contrast to Sect. 2.1, where we merely needed to consider the boundary values at a single soft rectangle, our analysis now requires the four neighboring rigid squares as well. In this section, we consider for \(\mu \in (0,1]\) the cross-like structure
see also Fig. 8.

An illustration of the cross structure defined in (3.1)
We begin with a brief lemma about transferring the Ciarlet–Nečas condition from one function to one that is sufficiently close with respect to the \(W^{1,p}\)-norm.
Lemma 9
(Approximate Ciarlet–Nečas condition) Let \(p>2\), \(M\subset {\mathbb {R}}^2\) be the union of finitely many bounded Lipschitz-domains. If \(u\in W^{1,p}(M;{\mathbb {R}}^2)\) satisfies the Ciarlet-Nečas condition (CN) for \(\Omega =M\) and there is \(v\in W^{1,p}(M;{\mathbb {R}}^2)\) with
for some \(h\in (0,1)\) sufficiently small, then there exists a constant \(C=C(M,p)>0\) such that
Proof
Let \(M_1,\ldots , M_n\subset {\mathbb {R}}^2\) for \(n\in {\mathbb {N}}\) be the finitely many bounded Lipschitz domains that comprise M, i.e., \(M= \bigcup _{i=1}^nM_i\). In light of the Sobolev embeddings applied to each \(M_i\), the bound (3.2) is (up to a constant \(C_1=C_1(M,p)>0\)) also uniform on \(M_i\). We therefore obtain
which, after taking the union \(i=1,\ldots , n\), leads to the estimate
for a constant \(C_2=C_2(M,p)>0\). On the other hand, the estimate (3.2) yields that
if \(C_1h<2\). Now, we combine (CN) with the estimates (3.4) and (3.3) to conclude that
\(\square \)
The next lemma, which is substantial for characterizing the set of admissible limit deformations, is a quantitative rigidity estimate in the spirit of [45] for cross structures \(E'\) as in (3.1). By combining Lemma 9 with careful geometric arguments, we show that the rotations on opposite squares can be selected identical while controlling the error terms. This result demonstrates, in particular, that Corollary 3 a) holds true if orientation preservation is replaced by non-self-interpenetration of matter.
Lemma 10
(Quantitative rigidity estimate for cross structures) Let \(p>2\) and \(E,E',E_0,\ldots , E_4\) be as in (3.1). There is a constant \(C=C(p)>0\) and \(\delta _0 = \delta _0(p)\) with the following property: For every \(u\in W^{1,p}(E;{\mathbb {R}}^2)\) satisfying the Ciarlet–Nečas condition (CN) on \(E'\) and for which \(\Vert {{\,\textrm{dist}\,}}(\nabla u, {{\,\textrm{SO}\,}}(2))\Vert _{L^p(E')}=:\delta < \delta _0\), there exist \(R,S\in {{\,\textrm{SO}\,}}(2)\) such that
and

The four rotated squares \(v_1(\overline{E_1}),\ldots , v_4(\overline{E_4})\) (which have side length 1). The connected image \(u(\partial E_0)\) (colored in red) is contained in the four closed tubes (colored in yellow and green) of thickness \(2\eta \). The points \(a,b,c,d,a',b',c',d'\) are defined as in (3.9) (color figure online)
Proof
This proof concentrates on the more delicate scenario \(\mu =1\), while the case \(\mu \in (0,1)\) shall be discussed at the end. We first establish (3.5) and (3.6) with the right-hand side \(C\delta ^{\frac{1}{3}}\) and improve the estimate later on.
Step 1: Geometric setup. Due to the quantitative geometric rigidity estimate by Friesecke, James and Müller [45, Theorem 3.1] there exist four matrices \(S_1,S_3,R_2,R_4\in {{\,\textrm{SO}\,}}(2)\) such that
for all \(i\in \{1,3\}\) and \(j\in \{2,4\}\). The reversed triangle inequality then yields that
Our primary task is to obtain an estimate for the quantities \(|S_1-S_3|\) and \(|R_2-R_4|\) in terms of powers of \(\Vert {{\,\textrm{dist}\,}}(\nabla u, {{\,\textrm{SO}\,}}(2))\Vert _{L^p(E')}\). For \(i\in \{1,3\}\), \(j\in \{2,4\}\) we set \(s_i = \int _{E_i} u(x) - S_i x \,{\textrm{d}}x\), \(r_j= \int _{E_j} u(x) - R_j x \,{\textrm{d}}x\) and introduce the auxiliary functions
From Poincaré’s inequality and the Sobolev embeddings, we then obtain, for all \(k\in \{1,\ldots , 4\}\), the estimates
From this uniform estimate, we infer that \(u(\overline{E_k})\subset v_k(\overline{E_k}) + \overline{B(0,\eta )}\); in particular, it holds that
see also Fig. 9. To shorten the notation, we set
and find that (3.8) and the continuity of u yields that
The goal for the remainder of this proof is to show that the polygons abcd and \(a'b'c'd'\) are close to a parallelogram with a small error in terms of powers of \(\eta \); note that \(S_1e_1 =S_3e_1\) (or \(R_2e_2 = R_4e_2\)) if abcd (or \(a'b'c'd'\)) is a parallelogram. First, we focus on the polygon abcd and estimate the deviation of \(c-b=v_3(x_3) - v_3(x_2) = S_3 e_1\) from \(d-a = v_1(x_4) - v_1(x_1) = S_1e_1\). In light of (3.9), (3.10) and the fact that \(v_2,v_4\) are a rigid body motions, we find that
if \(\eta \) is sufficiently small, cf. also for the notation of the annuli (1.13). Moreover, it holds that
since \(v_1\) and \(v_3\) are rigid body motions.
Step 2: Auxiliary function. In this step, we show that there exists a continuous and piecewise affine function \(\bar{v}:E\rightarrow {\mathbb {R}}^2\) such that \(\bar{v}\vert _{E_i}\) is a rigid body motion, and
for every \(i\in \{1,\ldots ,4\}\). Such a function is uniquely determined on \(E'\) by the vertices \(\bar{v}(x_1),\ldots , \bar{v}(x_4)\). Finding such suitable points is the goal of this next step.
Step 2a: Auxiliary points. We show that there exist \(\bar{b}\in a+ {\mathcal {S}}^1\) and \(\bar{c} \in d+{\mathcal {S}}^1\) such that \(|\bar{b} -\bar{c}|=1\) and

The two colored annuli describe the regions in which the points b, c can lie once a and d are fixed. If b is sufficiently far from d, then we choose \(\bar{b}\in a + {\mathcal {S}}^1\) such that \(|b-\bar{b}|\) is small and compare the intersection of \(\bar{b}+{\mathcal {S}}^1\) and \(d + {\mathcal {S}}^1\) with the point c, which lies in the intersection of the orange annulus with \(b+{\mathcal {S}}^1\) (colored in red) (color figure online)
If \(|b-d|\le \eta ^\frac{1}{3}\), then we choose \(\bar{b} = d\) and an arbitrary \(\bar{c}\in d + {\mathcal {S}}^1\) such that \(|\bar{c} - c| \le 4 \eta \). In this case, (3.13) holds if \(\eta \ll 1\).
Now, let \(|b-d|>\eta ^{\frac{1}{3}}\), then we choose an arbitrary \(\bar{b}\in a + {\mathcal {S}}^1\) with \(|b-\bar{b}| \le 4\eta \) and search for a point \(\bar{c}\in d +{\mathcal {S}}^1\) that satisfies \(|\bar{b}-\bar{c}|=1\); note that there exist at least one but at most two options. In any case, for some \(r\in [1-4\eta ,1+4\eta ]\), the following system of equations has to be satisfied by \(\bar{c}\) and c:
and
By suitably combining these equations, we obtain, for the difference \(c-\bar{c}\) in the direction \(d-b\), that
since \(\eta \ll 1\). Without loss of generality, we may now assume that \(a=0\), otherwise we move the coordinate system. Since \(|d-b|>\eta ^{\frac{1}{3}}\) we conclude that
Essentially, this estimate ensures that \(\bar{c}\) lies in an infinitely long tube in the direction \((d-b)^\perp \) with thickness \(C\eta ^{\frac{2}{3}}\) around c, see also Fig. 10. The intersection of this tube with the annulus \(\overline{A(d,1-4\eta , 1+4\eta )}\) has at most two connected components \(T_1,T_2\subset {\mathbb {R}}^2\). If \(T_1\ne T_2\), then we find one of the two possible choices for \(\bar{c}\) in each of the two sets. Naturally, we select \(\bar{c}\) to be in the same component as c. While the width (measured in the direction \(\frac{b-d}{|b-d|}\)) of \(T_1\cup T_2\) is at most \(C\eta ^{\frac{2}{3}}\) due to (3.15), its height (measured in the direction \(\frac{(b-d)^\perp }{|b-d|}\)) becomes largest as soon as the two sets touch. In this case, it holds that \(T_1=T_2\) and we may select any of the two choices for \(\bar{c}\). We then estimate via Pythagoras that
since \(\eta \ll 1\). This yields the desired estimate (3.13).
Step 2b: Construction of the auxiliary function \(\bar{v}\). Let \(\bar{v}: \overline{E'} \rightarrow {\mathbb {R}}^2\) be continuous such that \(\bar{v}\vert _{E_i}\) is a rigid body motion for every \(i\in \{1,\ldots , 4\}\), and
Exactly as in the proof of Lemma 2 (cf. Case 1), we can continuously extend \(\bar{v}\) to a piecewise affine function defined on all of E. We now aim to prove the estimate (3.12). Indeed, we first observe that \(\bar{v}=v_1\) on \(E_1\) by design. We then consider the case \(i=3\). Under consideration of (3.9), (3.17) and (3.13), it holds that
Since \(v_3\) and \(\bar{v}\) are both rigid body motions on the bounded set \(E_3\), and \(|Q-Q'|=\sqrt{2}|Qe_1-Q'e_1|\) for all \(Q,Q'\in {{\,\textrm{SO}\,}}(2)\), we conclude that
As for \(i\in \{2,4\}\), we repeat the same strategy and recall the estimates (3.10). Now, we have proven the desired estimate (3.12).
We also point out that
Step 3: Estimating \(|S_1-S_3|\) and \(|R_2-R_4|\). In the following, we differentiate between the different possible geometric of outcomes for \(\bar{v}(\partial E_0)\) (in other words the polygon \(a\bar{b}\bar{c}d\)). While some geometries (such as the case that \(a\bar{b}\bar{c}d\) is a parallelogram) provide the desired estimates for \(|S_1-S_3|\) and \(|R_2-R_4|\), others will be excluded via the non-interpenetration of u.
Step 3a: The \(\bar{v}(\partial E_0)\) is a parallelogram. In this case, it holds that
It is then straightforward to derive
from (3.9), and (3.13). We analogously conclude, under additional consideration of (3.10), that \(|R_2-R_4| \le C\eta ^{\frac{1}{3}}\). Together with (3.7), these inequalities already prove the desired the estimate (3.5) if \(\eta \ll 1\).
Step 3b: The \(\bar{v}(\partial E_0)\) is not a parallelogram. In this case, it holds that \(\bar{b}=d\) or \(\bar{c}=a\). We may, due to symmetry reasons, assume without loss of generality that \(\bar{b}=d\). Moreover, let
for some \(\varphi \in [0,\pi ]\) (the case \(\varphi \in [0,-\pi ]\) can be handled analogously), cf. Fig. 11. If \(\varphi =\pi \), then (3.19) also holds and we obtain (3.5) exactly as in Step 3a.
What follows is a discussion of the cases \(\varphi \in [0,\pi )\) where an overlap of the deformed squares \(\bar{v}(E_i)\) occurs, see Fig. 11. In light of Lemma 9 applied to \(M=\textrm{int}\, E'\), u, p as given, and \(v=\bar{v}\), we obtain the inequality
for a constant \(C_0>0\); here we used (3.18) and that \(\bar{v}\) is a rigid body motion on each \(E_i\), \(i\in \{1,\ldots ,4\}\). We further simplify this estimate to
If \(\varphi = 0\), then the continuity and the design of \(\bar{v}\) yields that \(|\bar{v}(E')| = 2\), so that (3.21) yields a contradiction if \(\eta \ll 1\). Due to monotonicity reasons, we can also exclude all cases \(\varphi \in [0,\frac{\pi }{2}]\) since \(|\bar{v}(E')|=3\) for \(\varphi =\frac{\pi }{2}\). We shall thus assume from now on that \(\varphi \in (\frac{\pi }{2},\pi )\).

An illustration of the reference configuration E and its deformed configuration under the continuous map \(\bar{v}\). Here, the points \(a\bar{b}\bar{c}d\) do not form a parallelogram, thus leading to an overlap of the deformed squares \(\bar{v}(E_1)\) and \(\bar{v}(E_4)\) of at least the hatched triangle with \(\theta = \pi - \varphi \)
The region \(D=\bar{v}(E_1)\cap \bar{v}(E_4)\) in which we observe an overlap has at least measure \(\frac{1}{2}\sin (\pi -\varphi ) = \frac{1}{2}\sin \varphi \); in other words, \(|\bar{v}(E')|\le 4 - \frac{1}{2}\sin \varphi \). Let \(\eta \) be small enough that \(C_0\eta ^{\frac{1}{3}}< \frac{1}{2}\), then there exists \(\varphi _0\in (\frac{\pi }{2},\pi )\) such that \(\frac{1}{2}\sin \varphi _0 = C_0\eta ^{\frac{1}{3}}\). We then derive from (3.21) the contradiction
for every \(\varphi \in (\frac{\pi }{2},\varphi _0)\). In the cases \(\varphi \in [\varphi _0, \pi )\), it holds that \(0<\sin \varphi \le \sin \varphi _0\) and thus,
under consideration of (3.20), (3.13), and the Hölder-continuity of the square-root. Analogously, obtain the same estimate for \(|R_2-R_4|\) if we take (3.10) into account. We now set \(S:=S_1\) and \(R:=R_2\) and thus, obtain the the desired estimate (3.5) in light of (3.7), (3.8) for \(\eta \ll 1\).
Step 4: The scalar product estimate. We now prove (3.6) with exponent \(\frac{1}{3}\) on the right-hand side. Indeed, if \(a\bar{b}\bar{c}d\) is not a parallelogram, we may assume (as in Step 3b) that \(\bar{b} = d\) and obtain that
due to (3.10), (3.13). If \(a\bar{b}\bar{c}d\) is a parallelogram and
then it holds that
Lastly, we deal with the case that (3.24) is not satisfied. If \(Se_1 \cdot (a-\bar{b})^\perp =0\), then there is nothing to prove. Otherwise, let \(\varphi \in (-\frac{\pi }{2},\frac{\pi }{2})\) be such that \(\bar{R}e_2:= \bar{v}\vert _{E_2}e_2 = -R_{\varphi }\bar{v}\vert _{E_1}e_2\) and note that for \(\varphi =0\) it holds that \(|\bar{v}(E')|=1\), which causes a contradiction to (3.21) for \(\eta \ll 1\). Henceforth, we shall only cover \(\varphi \in (0,\frac{\pi }{2})\) due to symmetry reasons. In these cases, we observe an overlap of \(\bar{v}(E_1)\) and \(\bar{v}(E_4)\) with at least measure \(\frac{1}{2}\sin (\frac{\pi }{2}-\varphi ) = \frac{1}{2}\cos \varphi \). We now proceed analogously to Step 3b to find some \(\varphi _0\in (0,\frac{\pi }{2})\) such that \(\frac{1}{2}\cos \varphi _0 = C_0\eta ^{\frac{1}{3}}\) with \(C_0\) as in (3.21). Every geometry resulting from \(\varphi \in (0,\varphi _0)\) can then be excluded as in (3.22). On the other hand, for \(\varphi \in (\varphi _0,\frac{\pi }{2})\), it holds that
and hence \(Se_1\cdot Re_1 \ge - C\eta ^{\frac{1}{3}}\) similarly to (3.25).
Step 5: Improving the estimate. In light of Step 3, we find that either \(\bar{v}(\partial E_0)\) forms a parallelogram, or it holds that \(\bar{b}=d\) or \(\bar{c}=a\) together with (3.20) for \(\varphi \ge \frac{\pi }{2}\). We find in either case that \(|\bar{c}-a|\ge \sqrt{2}\) or \(|\bar{b}-d|\ge \sqrt{2}\) due to the parallelogram identity or the choice \(\varphi \ge \frac{\pi }{2}\). In light of (3.13), it holds that \(|c-a|\ge l\) or \(|b-d|\ge l\) for some constant length \(l>0\) if \(\eta \) is sufficiently small. Let us assume that the latter inequality is true. We then repeat the procedure in Steps 2–4 to improve the estimates (3.5) and (3.6). Precisely, we first construct a new auxiliary function \(\tilde{v}: E\rightarrow {\mathbb {R}}^2\) similar to \(\bar{v}\) as in Step 2, for which we first need to find two points \(\tilde{b}\in a+{\mathcal {S}}^1\) and \(\tilde{c}\in d+{\mathcal {S}}^1\) such that \(|\tilde{b}-\tilde{c}|=1\) and
To this end, first choose any \(\tilde{c}\in d+{\mathcal {S}}^1\) such that \(|\tilde{c} - c|<4\eta \) and continue as in the proof of (3.14)–(3.16), exploiting the new estimate \(|b-d|>l\) for some constant \(l>0\) independent of \(\eta \). The rest of the proof works analogously to the Steps 2b - 4.
Step 6: The case \(\mu \in (0,1)\). The general strategy is quite similar. Step 1 stays essentially the same with the difference being \(b\in \overline{A(a,\mu -4\eta ,\mu +4\eta })\) and \(c\in \overline{A(d,\mu -4\eta ,\mu +4\eta })\) instead of (3.11).
Our next task is to find auxiliary points \(\bar{b}\in a+\mu {\mathcal {S}}^1\) and \(\bar{c}\in d+\mu {\mathcal {S}}^1\) such that \(|\bar{b}-\bar{c}|=1\) and (3.26) similar to Step 2a; the construction of the auxiliary function \(\bar{v}:E\rightarrow {\mathbb {R}}^2\) with the help of these points works exactly as before. Since \(\mu <1\) we always find that \(|b-d|>l\) for some \(l>0\) independent of \(\eta \) if \(\eta \ll 1\) is small enough. We may hence argue as in Step 5 to establish (3.26). Setting \(S:=S_1\) and \(R:=R_2\), we then need to prove estimates for \(|S - S_3|\), \(|R - R_4|\) and the scalar product \(Se_1\cdot Re_1\) similarly to Steps 3–4.
To this end, we seek to exclude invalid geometries for \(\bar{v}(\partial E_0)\) with the help of the approximate Ciarlet-Nečas condition from Lemma 9. The estimate (3.21) changes in this case to
The procedure to produce a contradiction to (3.27) for \(\eta \ll 1\) is now very similar to what we presented in Steps 3–4 and is based again on finding suitable rectangles that emerge from overlapping two neighboring rigid squares. Since the general methodology is virtually the same, we shall only explain one scenario in detail for illustration, see also Fig. 12. Let us assume that \(\bar{b} - a = R_\varphi (d-a)^\perp \) for \(\varphi \in [0,\frac{\pi }{2})\), then we find that the intersection of \(\bar{v}(E_3)\) and \(\bar{v}(E_4)\) contains at least a triangle of measure \(\frac{1}{2}\mu ^2\sin (\theta )\) with \(\theta =\frac{\pi }{2}-\varphi \). Choose now for sufficiently small \(\eta \) an angle \(\varphi _0\) in such a way that \(\frac{1}{2}\mu ^2\cos \varphi _0 = C_0\eta ^{\frac{1}{2}}\) so that the monotonicity of the cosine on \([0,\frac{\pi }{2}]\) generates a contradiction to (3.27) for every \(\varphi \in (0,\varphi _0)\). In the remaining cases, a direct calculation in the spirit of (3.23) shows that
and similarly for \(|Re_2-R_4e_2|\), which proves the desired estimate (3.5) when combined with (3.7). The scalar product estimate (3.6), cf. Step 4, can be handled analogously.

An illustration of the reference configuration E and its deformed configuration under the continuous map \(\bar{v}\). Here, the points \(a\bar{b}\bar{c}d\) do not form a parallelogram, thus leading to an overlap of the deformed squares \(\bar{v}(E_3)\) and \(\bar{v}(E_4)\) of at least the hatched triangle with \(\theta =\frac{\pi }{2}-\varphi \)
Finally, we shall point out that quantity \(\delta \) in the formulation of the statement is simply a multiple (dependent only on p) of \(\eta \). \(\square \)
In the following, we shall briefly remark on the dependence of the constants and rotations in Lemma 10 on uniform scalings and translations:
Remark 9
(Scaling analysis) Let \(\rho >0\) be arbitrary, then for every \(u\in W^{1,p}(\rho E;{\mathbb {R}}^2)\) that satisfies the Ciarlet–Nečas condition (CN) on \(\rho E'\) and for which \(\Vert {{\,\textrm{dist}\,}}(\nabla u,{{\,\textrm{SO}\,}}(2))\Vert _{L^p(\rho E')}<\delta _0 \rho ^{\frac{2}{p}}\), there exist \(R,S\in {{\,\textrm{SO}\,}}(2)\) such that
and \(Re_1 \cdot Se_1 \ge - C \rho ^{-\frac{1}{p}}\Vert {{\,\textrm{dist}\,}}(\nabla u,{{\,\textrm{SO}\,}}(2))\Vert _{L^p(\rho E)}^\frac{1}{2}\). Here, the constants \(\delta _0\) and C (which depend only on p) and the rotations S, R are exactly the same as in the case \(\rho =1\) in Lemma 10 and are invariant under translations of the domain. This is a direct consequence of a change of variables in the occurring integrals.
Next, we prove a Poincaré inequality for open sets of checkerboard structure. The prove is essentially the same as in the case of connected open sets and is based on an argument via contradiction. This way, however, we do not obtain an explicit dependence of the emerging constant.
Lemma 11
(Poincaré-inequality for sets with path-connected closure) Let \(p>2\), \(N\in {\mathbb {N}}\) and let \(U_1,\ldots ,U_N\) be disjoint, bounded Lipschitz domains such that the closure of \(U:=U_1\cup \ldots \cup U_N\) is path-connected. Then there exists a constant \(C>0\) with the following property: For every \(u\in W^{1,p}(U;{\mathbb {R}}^2)\cap C^0(\overline{U};{\mathbb {R}}^2)\cap L^p_0(U;{\mathbb {R}}^2)\), it holds that
Proof
We argue via contradiction and assume that for every \(j\in {\mathbb {N}}\) there exists a sequence \((\tilde{u}_j)_{j}\subset W^{1,p}(U;{\mathbb {R}}^2)\cap C^0(\overline{U};{\mathbb {R}}^2)\cap L^p_0(U;{\mathbb {R}}^2)\) and
We now define \(u_j:=\Vert \tilde{u}_j\Vert _{L^p(U;{\mathbb {R}}^2)}^{-1}\tilde{u}_j\) and obtain that \((u_j)_{j}\) is bounded in \(W^{1,p}(U;{\mathbb {R}}^2)\). In particular, each \(u^n_j:=u_j\vert _{U_n}\) for \(n\in \{1,\ldots ,N\}\) is bounded in \(W^{1,p}(U_n;{\mathbb {R}}^2)\). We can thus find \(u^{n}\in W^{1,p}(U_n;{\mathbb {R}}^2)\) such that
and we set
In light of the weak convergence of \((u_j^{n})_j\), (3.29) and the lower-semicontinuity of the norm, we find that \(u^{n}\) is constant on \(U_n\) with value, say \(d^{n}\in {\mathbb {R}}^2\). Since each \(u^{n}\) is continuous on \(\overline{U_n}\), and \(\overline{U}\) is path-connected, we find that \(d^{n}=d^{m}=d\in {\mathbb {R}}^2\) for every \(n,m\in \{1,\ldots ,N\}\). Hence, the vanishing mean value of u on U yields that
which implies that \(d=0\) and \(u=0\) on all of U. On the other hand, we then find a contradiction to \(\Vert u\Vert _{L^p(U;{\mathbb {R}}^2)}=1\) as u is the strong limit of \((u_j)_j\) on \(L^p(U;{\mathbb {R}}^2)\), recall (3.30) and \(\Vert u_j\Vert _{L^p(U;{\mathbb {R}}^2)}=1\). \(\square \)
As we have pointed out above, it is not clear if or how the constant C in (3.28) depends on the domain. We address this issue in the next lemma under additional assumptions and slight change in the domains of integration. This result serves as the second key ingredient in the characterization of the macroscopic deformation behavior.
Lemma 12
(Poincaré estimate for checkerboard structures) Let \(p>2\), \(U'\Subset U\) be bounded Lipschitz domains, and \(M>0\). There exists a constant \(C>0\) independent of \( \varepsilon \) such that for every \(u \in W^{1,p}(U;{\mathbb {R}}^2)\) with
and
it holds that
Before we prove this result, we first cover an alternative auxiliary extension-type result, in which the deformations and the gradients can be estimated separately, cf. [46].
Lemma 13
(Approximate extension result for checkerboard structures) Let \(p>2\), \(U'\Subset U\subset {\mathbb {R}}^2\) be a bounded open sets and \( \varepsilon >0\) sufficiently small. Moreover, let
as well as its Y-periodic extension. There exists a constant \(C>0\) independent of \( \varepsilon , U, U'\) and a linear and continuous operator \(L_r: W^{1,p}(U\cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)\cap C^0(\overline{U\cap \varepsilon Y_\textrm{stiff}};{\mathbb {R}}^2) \rightarrow W^{1,p}(U';{\mathbb {R}}^2)\) such that \(L_r u = u\) a.e. in \(U'\cap \varepsilon Y_\textrm{stiff}{\setminus } \varepsilon B_r\) and
for every \(u\in W^{1,p}(U\cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)\cap C^0(\overline{U\cap \varepsilon Y_\textrm{stiff}};{\mathbb {R}}^2)\).
Proof
This proof is subdivided into two main arguments. For \(V\subset {\mathbb {R}}^2\) with \(U'\Subset V\Subset U\) we first find an operator \(\hat{L}_r: W^{1,p}(U\cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)\cap C^0(\overline{U\cap \varepsilon Y_\textrm{stiff}};{\mathbb {R}}^2) \rightarrow W^{1,p}(V{\setminus } ( \varepsilon B_r\cap \varepsilon Y_\textrm{soft});{\mathbb {R}}^2)\) such that \(\hat{L}_r u = u\) a.e. in \(V\cap \varepsilon Y_\textrm{stiff}\) and
for every \(u\in W^{1,p}(U\cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)\cap C^0(\overline{U\cap \varepsilon Y_\textrm{stiff}};{\mathbb {R}}^2)\).
For such functions u, we then define the desired operator as
where the linear and continuous map \(\tilde{L}_r: W^{1,p}(V\cap \varepsilon (Y{\setminus } B_r);{\mathbb {R}}^2) \rightarrow W^{1,p}(U';{\mathbb {R}}^2)\) is taken as in [46, Theorem 2.1] for \(E=Y\setminus B_r\). We shall now detail the construction of \(\hat{L}\).

The unit cell Y (indicated in blue) and its immediate neighboring stiff components. The eight ellipses cover the soft part \(Y_\textrm{soft}\) in such a way that they overlap with exactly one straight piece of \(\partial Y_\textrm{soft}\). The red quarter-circles describe the set \(Y_\textrm{soft}\cap B_r\) in the unit cell with \(B_r\) as in (3.33) (color figure online)
Step 1: A preliminary construction on the first unit cell. Let Z be as in (2.42), and recall the analogous definition of \(Z_\textrm{stiff}\). Moreover, we define \(Y_\textrm{soft}^r:=Y_\textrm{soft}\setminus B_r\). The next task is to choose suitable sets \(V_1,\ldots ,V_N\) for \(N\ge 8\) that cover the compact set \(\overline{Y_\textrm{soft}}\) in a particular way. Each of these sets shall overlap with at most one of the eight straight components of \(\partial Y_\textrm{soft}\), see e.g., Fig. 13. Then, there exists a partition of unity \((\varphi _i)_i\) with \(\varphi _i\in C_c^{\infty }(V_i;{\mathbb {R}}^2)\) for \(i=1,\ldots ,N\) and \(\sum _{i=1}^N\varphi _i = 1\) on \(\bigcup _{i=1}^NV_i\). With standard mirroring techniques (cf. [53, Chapter 5]) performed on each of the sets \(V_1,\ldots , V_N\), we can thus find a linear and continuous operator \(L_r^{(1)}: W^{1,p}(Z_\textrm{stiff};{\mathbb {R}}^2)\cap C^0(\overline{Z_\textrm{stiff}};{\mathbb {R}}^2)\rightarrow W^{1,p}(Z_\textrm{stiff}\cup Y_\textrm{soft}^r;{\mathbb {R}}^2)\) such that
for every \(u\in W^{1,p}(Z_\textrm{stiff};{\mathbb {R}}^2)\cap C^0(\overline{Z_\textrm{stiff}};{\mathbb {R}}^2)\). We shall point out that not all of \(Z_\textrm{stiff}\) is needed to obtain an extension on \(Y_\textrm{soft}^r\) but it keeps the notation easier later on.
Step 2: Improvement on the first unit cell. The next objective is to construct another extension operator that allows better estimates for the gradients than in (3.34). This step can be handled similarly to the proof of [46, Lemma 2.6]. We define \(L_r^{(2)}: W^{1,p}(Z_\textrm{stiff};{\mathbb {R}}^2)\cap C^0(\overline{Z_\textrm{stiff}};{\mathbb {R}}^2)\rightarrow W^{1,p}(Z_\textrm{stiff}\cup Y_\textrm{soft}^r;{\mathbb {R}}^2)\) by setting
with \((u)_{Z_\textrm{stiff}}=\int _{Z_\textrm{stiff}}u\,{\textrm{d}}x\) and \(L_r^{(1)}\) as in Step 1. Let \(u\in W^{1,p}(Z_\textrm{stiff};{\mathbb {R}}^2)\cap C^0(\overline{Z_\textrm{stiff}};{\mathbb {R}}^2)\) be arbitrary. Since \(L_r^{(1)}\) is a linear extension operator, it holds that \(L_r^{(2)}u=u\) on \(Z_\textrm{stiff}\). As for the \(L^p\)-estimate of the gradient, we use the properties of \(L_r^{(1)}\), and invoke Lemma 11 for \(U=Z_\textrm{stiff}\) to compute that
where the constant \(C(\lambda ,p,r)\) may change from line to line. The estimate
can be acquired exactly as in the proof of [46, Lemma 2.6].
Step 3: Extension on large domains and scaling analysis. The rest of the proof can be executed exactly as in the Steps 2 and 3 of the proof of Lemma 8. \(\square \)
We are now positioned to prove the Poincaré-type estimate in Lemma 12.
Proof of Lemma 12
We argue via contradiction and suppose that for every \(j\in {\mathbb {N}}\) there exists \(u_j:=u_{ \varepsilon _j}\in W^{1,p}(U;{\mathbb {R}}^2)\) satisfying (3.31) and (3.32) for \( \varepsilon = \varepsilon _j\), and
Step 1: Rescaling and extending \(u_j\). We now normalize \(u_j\) by introducing
and observe that \(v_j\) still satisfies (3.31) for all \(j\in {\mathbb {N}}\). Moreover, it holds that
Now, choose \(U''\Subset U'\Subset U\), where the set \(U''\) is to be specified later, and apply Lemma 13 for the pair of sets \(U''\Subset U\) and sufficiently small \( \varepsilon \). This way, we find \(\bar{v}_j:=L_{r}v_j\in W^{1,p}(U'';{\mathbb {R}}^2)\) with the properties
Combining (3.37) with (3.38) then produces
Step 2: Asymptotic behavior of \((\bar{v}_j)_j\). In view of (3.39), we find that there exists a (non-relabeled) subsequence of \((\bar{v}_j)_j\) such that
for some constant vector \(d\in {\mathbb {R}}^2\). In this final step, we prove that |d| is close to 1 and close to 0 if \(|U'\setminus U''|\) and r are sufficiently small, which is a contradiction.
Step 2a: The length |d| is small. First, we exploit (3.31) to compute that
The first term in (3.41) converges to \(|Y_{\textrm{stiff}}||U''|d\) due to (3.40) as \(j\rightarrow \infty \). We handle the third term in (3.41) via Hölder’s inequality and (3.37),
The second term in (3.41) can be similarly estimated:
We shall also point out that \(|U''\cap \varepsilon _j B_r|\rightarrow |U''|\pi r^2\) and \(\int _{U''} |\bar{v}_j| \mathbb {1}_{ \varepsilon _j B_r} \,{\textrm{d}}x \rightarrow |d||U''|\pi r^2\) as \(j\rightarrow \infty \).
In conclusion, we first select for arbitrary \(\delta >0\) the set \(U''\Subset U'\) large enough that (3.42) is smaller than \(\delta \). Then, we select r small enough and subsequently j sufficiently large in such a way that (3.43) is also bounded by \(\delta \), and that
for all such j. These choices then produce
Step 2b: Bound of |d| from below. The convergence (3.40) yields that
On the other hand, this norm can be estimated from below by exploiting (3.39) and (3.36):
The last two terms in (3.45) are handled via (3.37) and Hölder’s inequality, namely
and
Similarly to Step 2a, we then find that \(|d-1|\) is very small which is a contradiction to (3.44). This concludes the proof of this lemma. \(\square \)
Finally, we state a brief technical Lemma which ensures that (3.32) is satisfied for a suitable sequence later on.
Lemma 14
Let \(p>2\), and \(U\subset {\mathbb {R}}^2\) be a bounded Lipschitz domain and let \((v_ \varepsilon )_ \varepsilon \subset W^{1,p}(U;{\mathbb {R}}^2)\) be bounded and satisfy \(\Vert v_ \varepsilon \Vert _{L^p(U\cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)}\ge a > 0\). Then, there exist \(U'\Subset U\) and \(M>0\) such that
for every \( \varepsilon >0\).
Proof
Since the family \((v_ \varepsilon )_ \varepsilon \) is bounded in \(W^{1,p}(U;{\mathbb {R}}^2)\), we find via Sobolev-embeddings that \((v_ \varepsilon )_ \varepsilon \) is bounded in \(C^0(\overline{U};{\mathbb {R}}^2)\). With \(U_j:=\{x\in U: {{\,\textrm{dist}\,}}(x,\partial U) > \frac{1}{j}\}\), we estimate
in particular, we find some \(j_0\in {\mathbb {N}}\) such that we find on \(U':=U_{j_0}\) that
for all \( \varepsilon >0\). We argue for the rest of the proof via contradiction. Assume that for the set \(U'\) chosen above and every \(j\in {\mathbb {N}}\) there exists \(v_j:=v_{ \varepsilon _j}\) such that
We then find for every \(j>1\) that
which is a contradiction if j is large enough. \(\square \)
3.2 Macroscopic Deformation Behavior
With technical tools and results about the local behavior in place, we are now in a position to derive global effects. The next theorem serves as the compactness result in Theorem 1 and is the analogon of Proposition 4 a) in the rigid case.
Proposition 15
(Criterion for limit deformations) Let \(p>2\), \(\beta >2p+2\), and let \((u_ \varepsilon )_ \varepsilon \subset {\mathcal {A}}\), cf. (1.1), be a sequence that satisfies
for a constant \(C>0\) independent of \( \varepsilon \). If \(u_ \varepsilon \rightharpoonup u\) in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\) for some \(u\in W^{1,p}(\Omega ;{\mathbb {R}}^2)\), then u is affine with \(\nabla u \in K\) with K as in (1.8).
Proof
Throughout this proof as well as the proof of Theorem 1, we work on several nested compactly contained Lipschitz domains \(\Omega _0:=\Omega , \Omega _1,\ldots ,\Omega _4\) with \(\Omega _i\Subset \Omega _{i-1}\) with \(i\in \{1,\ldots ,4\}\). For such sets, we define
and observe that
for sufficiently small \( \varepsilon >0\). For \(k\in J_{ \varepsilon ,1}\), let \( \varepsilon (k+Z)\) be the union of \( \varepsilon (k+Y)\) and its eight neighboring cells, see (2.42), and note that \( \varepsilon (k+Z) \subset \Omega \) for \( \varepsilon \) sufficiently small.
Step 1: Setup. Let \(\Omega _1\Subset \Omega \) be an arbitrary bounded Lipschitz domain. We briefly write
for \(k\in {\mathbb {Z}}^2\) and observe that
Since \(\beta> 2p+2 > 2\) we find that \(\Vert {{\,\textrm{dist}\,}}(\nabla u_ \varepsilon ,{{\,\textrm{SO}\,}}(2))\Vert _{L^p(E'( \varepsilon ,k))}^p \le C \varepsilon ^\beta \le \delta _0 \varepsilon ^{2}\) with \(\delta _0\) as in Lemma 10, and \(k\in {\mathbb {Z}}^2\) with \( \varepsilon (k+Z)\subset \Omega \). For all these k, we may apply Lemma 10 and Remark 9 for \(\mu =\frac{1-\lambda }{\lambda }\), \(\rho =\lambda \varepsilon \), and the sets \(\rho E_0 = \varepsilon (k+Y_2)\), \(\rho E_i = E_i( \varepsilon ,k)\) for \(i\in \{1,\ldots ,4\}\), to obtain two rotations \(R_ \varepsilon ^k,S_ \varepsilon ^k\in {{\,\textrm{SO}\,}}(2)\) such that
and
for a constant \(C>0\) independent of \( \varepsilon \) and k. On this basis, we define two auxiliary piecewise constant maps \(S_ \varepsilon , R_ \varepsilon :\Omega \rightarrow {{\,\textrm{SO}\,}}(2)\) as
Step 2: Strong convergence of rotations. We consider only \((S_ \varepsilon )_ \varepsilon \), the other sequence can be dealt with analogously. Recalling (3.48), (3.49), and (3.50) we find for \(x\in \varepsilon (k+Y)\) and \(\tilde{x} \in \varepsilon (k+ e_2 + Y)\) that
Analogously (and with an additional triangle inequality), we obtain for any \(\tilde{x}\in \varepsilon (k+Z)\) that
with a constant \(C>0\) independent of \( \varepsilon \), see (2.42) for the definition of I. We choose now an arbitrary \(\xi \in {\mathbb {R}}^2\) with \(|\xi |\le \frac{1}{2}{{\,\textrm{dist}\,}}(\Omega _1,\partial \Omega )\) and we set \(m_{ \varepsilon }=\lceil \frac{|\xi |_{\infty }}{ \varepsilon } \rceil \) with \(|\xi |_{\infty }:=\max \{|\xi _1|, |\xi _2|\}\). Now, select \(m_{ \varepsilon } +1\) points \(0=\xi ^{(0)}, \xi ^{(1)}, \ldots , \xi ^{(m_{ \varepsilon })}= \xi \) in such a way that \(|\xi ^{(j+1)}-\xi ^{(j)}|_{\infty } \le \varepsilon \) for every \(j=0, \ldots , m_{ \varepsilon }-1\), which produces a piecewise straight path from the origin to \(\xi \) with maximal step length \( \varepsilon \). With the help of a telescoping sum argument and the discrete Hölder’s inequality, we obtain
Integrating this estimate on \( \varepsilon (k+Y)\) and combining the result with (3.53) generates
with \(\lfloor \zeta \rfloor := (\lfloor \zeta _1\rfloor ,\lfloor \zeta _2 \rfloor )\) for \(\zeta \in {\mathbb {R}}^2\). Summing over all \(k\in J_{ \varepsilon ,1}\) and considering that \(m_ \varepsilon \le C\frac{|\xi |}{ \varepsilon } + 1\) as well (3.50) we derive
for a constant \(C>0\) independent of \( \varepsilon \). In light of Fréchét-Kolmogorov’s theorem and the fact that \(\beta > 2p+2\), we conclude that \((S_ \varepsilon )_ \varepsilon \) converges strongly in \(L^p(\Omega _1;{\mathbb {R}}^{2\times 2})\) to a constant rotation \(S\in {{\,\textrm{SO}\,}}(2)\). We find analogously that \((R_ \varepsilon )_{ \varepsilon }\) converges strongly to some \(R\in {{\,\textrm{SO}\,}}(2)\) in \(L^p(\Omega _1;{\mathbb {R}}^{2\times 2})\). Moreover, we derive from (3.51) and (3.46) that
since \(\beta >2\), which yields that \(Se_1 \cdot Re_1 \ge 0\).
Step 3: Approximation of \(u_ \varepsilon \) by piecewise affine functions. We recall w as in (2.23), set \(\hat{w}_ \varepsilon : {\mathbb {R}}^2\rightarrow {\mathbb {R}}^2,\ x\mapsto \varepsilon w(\tfrac{x}{ \varepsilon }),\) and define
The goal is the prove that \(w_ \varepsilon \) and \(u_ \varepsilon \) are close to each other in the \(L^p\)-sense on a suitable large subset by comparing them on the soft and stiff components separately. We first distinguish between two cases: if \(\Vert w_ \varepsilon - u_ \varepsilon \Vert _{L^p(\Omega _1;{\mathbb {R}}^2)}\rightarrow 0\) as \( \varepsilon \rightarrow 0\), then there is nothing to prove. Otherwise we find via Lemma 14, applied to \(v_ \varepsilon = u_ \varepsilon - w_ \varepsilon \) and \(U=\Omega _1\), a subset \(\Omega _2\Subset \Omega _1\) and \(M>0\) such that
This subset can be chosen as close to \(\Omega _1\) as we wish without changing the estimate (3.55).
On each \( \varepsilon (k+Y_1)\) for \(k\in J_{ \varepsilon ,2}\) we estimate
and analogously on \( \varepsilon (k+Y_3)\). A summation of these estimates over all \(k\in J_{ \varepsilon ,2}\) in combination with (3.46) then produces
where the latter two terms vanish in the limit due to Step 1. Now, let \(\Omega _3\Subset \Omega _2\) be another arbitrary bounded Lipschitz domain. In light of (3.55), we may apply the Poincaré-type Lemma 12 to \(v=u_ \varepsilon - w_ \varepsilon \), \(U=\Omega _2\), and \(U'=\Omega _3\), to obtain
for a constant \(C>0\) independent of \( \varepsilon \).
To produce a similar estimate on the soft components, we first choose yet another bounded Lipschitz domain \(\Omega _4\Subset \Omega _3\). We also observe that \(Y_2 \subset Y_1 + \lambda e_2\) if \(\lambda \ge \frac{1}{2}\), which allows us to estimate
in the case \(\lambda <\frac{1}{2}\), it holds that \(Y_2 \subset Y_3 - \lambda e_2\), which leads to a similar estimate. Analogously, we find that
since \(Y_4\subset Y_1 + \lambda e_1\) if \(\lambda \ge \frac{1}{2}\). Summing (3.56), (3.59), (3.60) over all \(k\in J_{ \varepsilon ,4}\), and combining the result with (3.58) then yields
with a constant \(C>0\) independent of \( \varepsilon >0\). This shows that \(u_ \varepsilon \) and \(w_ \varepsilon \) have the same limit in \(L^p(\Omega _4;{\mathbb {R}}^2)\). Since \(w_ \varepsilon \) converges to an affine function w with gradient \(\nabla w = F\in K\), cf. (1.8), the limit function u satisfies \(\nabla u = F\in K\) on \(\Omega _4\).
An exhaustion argument proves the desired result. \(\square \)
3.3 Proof of Theorem 1
Finally, we give the proof of Theorem 1, which consists of verifying the lower and upper bounds for the \(\Gamma \)-convergence result.
Proof of Theorem 1
Step 1: The lower bound. Assume that \((u_ \varepsilon )_ \varepsilon \subset L^p_0(\Omega ;{\mathbb {R}}^2)\) converges strongly to \(u\in L^p_0(\Omega ;{\mathbb {R}}^2)\) and satisfies
in this case, it holds that \((u_ \varepsilon )_ \varepsilon \subset {\mathcal {A}}\). Due to the lower bounds (1.4) and (1.3) for \(W_\textrm{soft}\) and \(W_\textrm{stiff}\), we find that \((\nabla u_ \varepsilon )_{ \varepsilon }\) is bounded in \(L^p(\Omega ;{\mathbb {R}}^2)\). A direct application of Poincaré’s inequality on \(\Omega \) yields the boundedness of \((u_ \varepsilon )_{ \varepsilon }\) in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\) as well as \(u_ \varepsilon \rightharpoonup u\) in \(W^{1,p}(\Omega ;{\mathbb {R}}^2)\) up to the selection of a (non-relabeled) subsequence. Moreover, Proposition 15 produces that u is affine with gradient \(\nabla u = F\in K\), cf. (1.8), in view of the lower bound (1.3).
From the proof of Proposition 15, we recall the five sets \(\Omega _4\Subset \ldots \Subset \Omega _1\Subset \Omega _0=\Omega \) together with their index sets \(J_{ \varepsilon ,1},\ldots ,J_{ \varepsilon ,4}\) as in (3.47), the quantities \(S_ \varepsilon ,R_ \varepsilon \) as in (3.52) with limits \(S,R\in {{\,\textrm{SO}\,}}(2)\), as well as \(w_ \varepsilon \) as in (3.54). Since \(W^\textrm{qc}\) is polyconvex, there exists a lower semicontinuous and convex function \(g:{\mathbb {R}}^{2\times 2}\times {\mathbb {R}}\rightarrow [0,\infty ]\) such that \(W^\textrm{qc}(F) = g(F,\det F)\). In light of Jensen’s inequality (see [49, Lemma A.2]) for extended-valued functions, we estimate

We now want to exchange every \(u_ \varepsilon \) by the easier piecewise affine function \(w_ \varepsilon \), which is suitably close to \(u_ \varepsilon \). Since \(|\Omega _4\cap \varepsilon Y_i| \rightarrow |\Omega _4||Y_i|>0\) as \( \varepsilon \rightarrow 0\), it remains to show that
as \( \varepsilon \rightarrow 0\) for \(i\in \{2,4\}\).
Lemma 8 applied to \(U=\Omega _2\) and \(U'=\Omega _4\) now generates a linear and continuous operator \(L: W^{1,p}(\Omega _2\cap \varepsilon Y_\textrm{stiff};{\mathbb {R}}^2)\cap C^0(\overline{\Omega _2\cap \varepsilon Y_\textrm{stiff}};{\mathbb {R}}^2)\rightarrow W^{1,p}(\Omega _4;{\mathbb {R}}^2)\). We then find that we may replace \(u_ \varepsilon \) and \(w_ \varepsilon \) in (3.62) by the continuous functions \(\tilde{w}_ \varepsilon := L(w_ \varepsilon \vert _{\Omega _2\cap \varepsilon Y_\textrm{stiff}})\) and \(\tilde{u}_ \varepsilon := L(u_ \varepsilon \vert _{\Omega _2\cap \varepsilon Y_\textrm{stiff}})\) since the minors are Null-Lagrangians. For the difference in the gradients, we compute
with a constant \(C>0\) independent of \( \varepsilon \) for \(i\in \{2,4\}\). As for the determinants, we use that \((w_ \varepsilon )_ \varepsilon \) and \((u_ \varepsilon )_ \varepsilon \) are both bounded in \(W^{1,p}(\Omega _2;{\mathbb {R}}^2)\) to estimate
with \(\frac{1}{p'} + \frac{1}{p} = 1\) and a constant \(C>0\) independent of \( \varepsilon \), for \(i\in \{2,4\}\). By combining (3.63) and (3.64) with (3.57), we verify (3.62).
Considering the definition (3.54) of \(w_ \varepsilon \), we can now pass to the limit in (3.61),

with \(\nabla u = F\in K\). By taking the supremum over all compactly contained \(\Omega _4\Subset \Omega \), we produce the desired estimate.
Step 2: The upper bound. The recovery sequence can be constructed exactly as in the proof of Theorem 5. \(\square \)
Data Availability Statement
Data is sharing not applicable to this article as no datasets were generated or analysed during the current study.
References
Voight, W.: Lehrbuch der Kristallphysik. Teubner, Leipzig, 1928
Lakes, R.: Foam structures with a negative Poisson’s ratio. Science 235(4792), 1038–1040, 1987. https://doi.org/10.1126/science.235.4792.1038
Evans, K., Nkansah, M.A., Hutchinson, I.J., Rogers, S.C.: Molecular network design. Nature 353(4792), 124, 1991. https://doi.org/10.1038/353124a0
Milton, G.W.: Composite materials with poisson’s ratios close to \(-1\). J. Mech. Phys. Solids 40, 1105–1137, 1992
Zheng, Y., Niloy, I., Tobasco, I., Celli, P., Plucinsky, P.: Modelling planar kirigami metamaterials as generalized elastic continua. Proc. R. Soc. A: Math. Phys. Eng. Sci.479(2272), 20220665, 2023. https://doi.org/10.1098/rspa.2022.0665
Zheng, Y., Niloy, I., Celli, P., Tobasco, I., Plucinsky, P.: Continuum field theory for the deformations of planar Kirigami. Phys. Rev. Lett. 128, 208003, 2022. https://doi.org/10.1103/PhysRevLett.128.208003
Li, X., Kohn, R.V.: Some results on the Guest–Hutchinson modes and periodic mechanisms of the Kagome lattice metamaterial. J. Mech. Phys. Solids 178, 105311, 2023. https://doi.org/10.1016/j.jmps.2023.105311
Li, X.: Guest–Hutchinson modes and the macroscopic energy of the Kagome lattice metamaterial and related systems. Ph.D. thesis, New York University, 2023
Grima, J.N., Evans, K.: Auxetic behavior from rotating squares. J. Mater. Sci. Lett. 19, 1563–1565, 2000. https://doi.org/10.1023/A:1006781224002
Grima, J.N., Chetcuti, E., Manicaro, E., Attard, D., Camilleri, M., Gatt, R., Evans, K.E.: On the auxetic properties of generic rotating rigid triangles. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci.468(2139), 810–830, 2012. https://doi.org/10.1098/rspa.2011.0273
Grima, J.N., Evans, K.: Auxetic behavior from rotating triangles. J. Mater. Sci. 41, 3193–3196, 2006. https://doi.org/10.1007/s10853-006-6339-8
Grima, J.N., Alderson, A., Evans, K.: Negative Poisson’s ratio from rotating rectangles. Comput. Methods Sci. Technol. 10, 137–145, 2004. https://doi.org/10.12921/cmst.2004.10.02.137-145
Grima, J.N., Gatt, R., Alderson, A., Evans, K.: On the auxetic properties of ‘rotating rectangles’ with different connectivity. J. Phys. Soc. Jpn. 74, 2866–2867, 2005. https://doi.org/10.1143/JPSJ.74.2866
Grima, J.N., Manicaro, E., Attard, D.: Auxetic behaviour from connected different-sized squares and rectangles. Proc. R. Soc. A: Math. Phys. Eng. Sci.467, 439–458, 2011. https://doi.org/10.1098/rspa.2010.0171
Dudek, K.K., Martínez, J.A.I., Ulliac, G., Kadic, M.: Micro-scale auxetic hierarchical mechanical metamaterials for shape morphing. Adv. Mater.34(14), 2110115, 2022. https://doi.org/10.1002/adma.202110115
Milton, G.W.: Complete characterization of the macroscopic deformations of periodic unimode metamaterials of rigid bars and pivots. J. Mech. Phys. Solids 61(7), 1543–1560, 2013. https://doi.org/10.1016/j.jmps.2012.08.011
Greaves, G., Greer, A., Lakes, R., Rouxel, T.: Poisson’s ratio and modern materials. Nat. Mater. 10, 986, 2011. https://doi.org/10.1038/nmat3177
Borcea, C.S., Streinu, I.: Geometric auxetics. Proc. A.471(2184), 20150033–24, 2015. https://doi.org/10.1098/rspa.2015.0033
Borcea, C.S., Streinu, I.: Periodic auxetics: structure and design. Q. J. Mech. Appl. Math. 71(2), 125–138, 2018. https://doi.org/10.1093/qjmam/hbx028
Borcea, C.S., Streinu, I.: Periodic frameworks and flexibility. Proc. R. Soc. Lond. Ser. A. Math. Phys. Eng. Sci.466, 2633–2649, 2010. https://doi.org/10.1098/rspa.2009.0676
Kochmann, D.M., Venturini, G.N.: Homogenized mechanical properties of auxetic composite materials in finite-strain elasticity. Smart Mater. Struct. 22(8), 084004, 2013. https://doi.org/10.1088/0964-1726/22/8/084004
Braides, A.: \(\Gamma \)-convergence for Beginners. Oxford Lecture Series in Mathematics and its Applications, vol. 22, p. 218. Oxford University Press, Oxford, 2002. https://doi.org/10.1093/acprof:oso/9780198507840.001.0001
Dal Maso, G.: An Introduction to \(\Gamma \)-convergence. Progress in Nonlinear Differential Equations and their Applications, vol. 8, p. 340. Birkhäuser Boston, Inc., Boston, MA, 1993. https://doi.org/10.1007/978-1-4612-0327-8
Braides, A.: Homogenization of some almost periodic coercive functional. Rend. Accad. Naz. Sci. XL Mem. Mat. (5) 9(1), 313–321, 1985
Müller, S.: Homogenization of nonconvex integral functionals and cellular elastic materials. Arch. Ration. Mech. Anal. 99(3), 189–212, 1987. https://doi.org/10.1007/BF00284506
Cherdantsev, M., Cherednichenko, K.D.: Two-scale \(\Gamma \)-convergence of integral functionals and its application to homogenisation of nonlinear high-contrast periodic composites. Arch. Ration. Mech. Anal. 204(2), 445–478, 2012. https://doi.org/10.1007/s00205-011-0481-4
Cherdantsev, M., Cherednichenko, K.D., Neukamm, S.: High contrast homogenization in nonlinear elasticity under small loads. Preprint arXiv:1303.1224, 2017
Davoli, E., Gavioli, C., Pagliari, V.: A homogenization result in finite plasticity and its application to high-contrast media. arXiv:2204.09084, 2022
Davoli, E., Kružík, M., Pagliari, V.: Homogenization of high-contrast composites under differential constraints. Preprint, arXiv:2104.11306, 2021
Christowiak, F., Kreisbeck, C.: Homogenization of layered materials with rigid components in single-slip finite crystal plasticity. Calc. Var. Partial Differential Equations 56(3), 75, 2017. https://doi.org/10.1007/s00526-017-1171-3
Christowiak, F., Kreisbeck, C.: Asymptotic rigidity of layered structures and its application in homogenization theory. Arch. Ration. Mech. Anal. 235(1), 51–98, 2020. https://doi.org/10.1007/s00205-019-01418-0
Davoli, E., Ferreira, R., Kreisbeck, C.: Homogenization in BV of a model for layered composites in finite crystal plasticity. Adv. Calc. Var. 14(3), 441–473, 2021. https://doi.org/10.1515/acv-2019-0011
Engl, D., Kreisbeck, C., Ritorto, A.: Asymptotic analysis of deformation behavior in high-contrast fiber-reinforced materials: rigidity and anisotropy. Math. Models Methods Appl. Sci. 32(8), 1633–1669, 2022. https://doi.org/10.1142/S0218202522500385
Ciarlet, P.G., Nečas, J.: Injectivity and self-contact in nonlinear elasticity. Arch. Rational Mech. Anal. 97(3), 171–188, 1987. https://doi.org/10.1007/BF00250807
Ball, J.M.: Global invertibility of Sobolev functions and the interpenetration of matter. Proc. Roy. Soc. Edinburgh Sect. A88(3–4), 315–328, 1981. https://doi.org/10.1017/S030821050002014X
Müller, S., Spector, S.J.: An existence theory for nonlinear elasticity that allows for cavitation. Arch. Rational Mech. Anal. 131(1), 1–66, 1995. https://doi.org/10.1007/BF00386070
Bouchala, O., Hencl, S., Molchanova, A.: Injectivity almost everywhere for weak limits of Sobolev homeomorphisms. J. Funct. Anal. 279(7), 108658–32, 2020. https://doi.org/10.1016/j.jfa.2020.108658
Henao, D., Mora-Corral, C., Oliva, M.: Global invertibility of Sobolev maps. Adv. Calc. Var. 14(2), 207–230, 2021. https://doi.org/10.1515/acv-2018-0053
Krömer, S.: Global invertibility for orientation-preserving Sobolev maps via invertibility on or near the boundary. Arch. Ration. Mech. Anal. 238(3), 1113–1155, 2020. https://doi.org/10.1007/s00205-020-01559-7
Conti, S., Dolzmann, G.: On the theory of relaxation in nonlinear elasticity with constraints on the determinant. Arch. Ration. Mech. Anal. 217(2), 413–437, 2015. https://doi.org/10.1007/s00205-014-0835-9
Braides, A., Garroni, A.: Homogenization of periodic nonlinear media with stiff and soft inclusions. Math. Models Methods Appl. Sci. 5(4), 543–564, 1995. https://doi.org/10.1142/S0218202595000322
Duerinckx, M., Gloria, A.: Stochastic homogenization of nonconvex unbounded integral functionals with convex growth. Arch. Ration. Mech. Anal. 221(3), 1511–1584, 2016. https://doi.org/10.1007/s00205-016-0992-0
Czajkowski, M., Coulais, C., van Hecke, M., Rocklin, D.Z.: Conformal elasticity of mechanism-based metamaterials. Nat. Commun. 13(1), 211, 2022. https://doi.org/10.1038/s41467-021-27825-0
Reshetnyak, Y.G.: Liouville’s conformal mapping theorem under minimal regularity hypotheses. Sib. Math. J. 8, 835–840, 1967
Friesecke, G., James, R.D., Müller, S.: A theorem on geometric rigidity and the derivation of nonlinear plate theory from three-dimensional elasticity. Commun. Pure Appl. Math. 55(11), 1461–1506, 2002. https://doi.org/10.1002/cpa.10048
Acerbi, E., Chiadò Piat, V., Dal Maso, G., Percivale, D.: An extension theorem from connected sets, and homogenization in general periodic domains. Nonlinear Anal. 18(5), 481–496, 1992. https://doi.org/10.1016/0362-546X(92)90015-7
Grisvard, P.: Elliptic Problems in Nonsmooth Domains. Monographs and Studies in Mathematics, vol. 24, p. 410. Pitman (Advanced Publishing Program), Boston, MA (1985)
Giacomini, A., Ponsiglione, M.: Non-interpenetration of matter for SBV deformations of hyperelastic brittle materials. Proc. Roy. Soc. Edinb. Sect. A138(5), 1019–1041, 2008. https://doi.org/10.1017/S0308210507000121
Martin, R.J., Voss, J., Ghiba, I.-D., Sander, O., Neff, P.: The quasiconvex envelope of conformally invariant planar energy functions in isotropic hyperelasticity. J. Nonlinear Sci. 30(6), 2885–2923, 2020. https://doi.org/10.1007/s00332-020-09639-4
Attouch, H.: Variational Convergence for Functions and Operators. Applicable Mathematics Series, p. 423. Pitman (Advanced Publishing Program), Boston, MA (1984)
Cagnetti, F., Scardia, L.: An extension theorem in SBV and an application to the homogenization of the Mumford-Shah functional in perforated domains. J. Math. Pures Appl. (9) 95(4), 349–381, 2011. https://doi.org/10.1016/j.matpur.2010.03.002
Lamberti, P.D., Provenzano, L.: On trace theorems for Sobolev spaces. Matematiche (Catania) 75(1), 137–165, 2020. https://doi.org/10.4418/2020.75.1.8
Adams, R.A., Fournier, J.J.F.: Sobolev Spaces, 2nd edn. Pure and Applied Mathematics (Amsterdam), vol. 140, p. 305. Elsevier/Academic Press, Amsterdam, 2003
Acknowledgements
This work was initiated when CK and DE were affiliated with Utrecht University. CK acknowledges partial support by the Dutch Research Council NWO through the project TOP2.17.01 and the Westerdijk Fellowship program.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
All authors declare that they have no Conflict of interest.
Additional information
Communicated by I. Fonseca.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Düll, WP., Engl, D. & Kreisbeck, C. A Variational Perspective on Auxetic Metamaterials of Checkerboard-Type. Arch Rational Mech Anal 248, 46 (2024). https://doi.org/10.1007/s00205-024-01989-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00205-024-01989-7