
Abstract
The Dean–Kawasaki equation—a strongly singular SPDE—is a basic equation of fluctuating hydrodynamics; it has been proposed in the physics literature to describe the fluctuations of the density of N independent diffusing particles in the regime of large particle numbers \(N\gg 1\). The singular nature of the Dean–Kawasaki equation presents a substantial challenge for both its analysis and its rigorous mathematical justification. Besides being non-renormalisable by the theory of regularity structures by Hairer et al., it has recently been shown to not even admit nontrivial martingale solutions. In the present work, we give a rigorous and fully quantitative justification of the Dean–Kawasaki equation by considering the natural regularisation provided by standard numerical discretisations: We show that structure-preserving discretisations of the Dean–Kawasaki equation may approximate the density fluctuations of N non-interacting diffusing particles to arbitrary order in \(N^{-1}\) (in suitable weak metrics). In other words, the Dean–Kawasaki equation may be interpreted as a “recipe” for accurate and efficient numerical simulations of the density fluctuations of independent diffusing particles.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The Dean–Kawasaki equation
with \(\varvec{\xi }\) denoting a vector-valued space-time white noise—has been proposed by Dean [7] and Kawasaki [26] as a model for density fluctuations in a system of N indistinguishable particles undergoing diffusion in the regime of large particle numbers \(N\gg 1\). Its mathematical analysis is complicated by its highly singular nature: a scaling argument shows that (1) is not renormalisable by the theory of regularity structures by Hairer et al., even in one spatial dimension \(d=1\).
Recently, Konarovskyi, Lehmann, and von Renesse [29] have obtained a striking rigidity result for the Dean–Kawasaki equation (1): They show that the only martingale solutions to (1) are of the form of an empirical measure for N independent Brownian motions
where the \(\{\varvec{w}_k\}_{k=1}^{N}\) denote the N independent Brownian motions. In particular, no solution exists for non-integer values of N. This result may be viewed as casting doubts on the mathematical meaningfulness of the Dean–Kawasaki equation: It amounts to stating that the Dean–Kawasaki equation is just a mathematically complex way of rewriting the diffusion of N particles. In turn, this naturally raises the question what the advantages of the Dean–Kawasaki equation (1) might be over the particle formulation of diffusion (2) from the point of view of physics.
In the present work, we provide a rigorous justification for the Dean–Kawasaki equation. We show that standard numerical discretisations of the Dean–Kawasaki equation (1)—such as finite difference or finite element schemes—provide accurate descriptions of the density fluctuations in a system of N diffusing particles if measured in suitably weak metrics. Roughly speaking, we show that, under certain conditions, the solutions \(\rho _h\) to the discretised Dean–Kawasaki equation achieve the approximation quality
where \(j\in \mathbb {N}\) is arbitrary, h is the spatial discretisation parameter, \(p+1\) is the order of convergence of the numerical scheme in the Sobolev space \(H^{-1}\), and \(d_{weak,2j-1}\) is a suitable weak metric of negative Sobolev type. In particular, the accuracy is of arbitrarily large order in \(N^{-1/2}\) and hence only limited by the numerical discretisation error and the negative part \(\rho ^{-}_h\). In addition, we show that \(\mathbb {E}\left[ {\Vert \rho ^-_h\Vert }\right] \) decays exponentially fast in—roughly speaking—\((hN^{1/d})^{1/2}\), demonstrating that the term becomes quickly negligible in the scaling regime
(where we have dropped logarithmic corrections in N and contributions on the final time horizon for the sake of this introductory exposition). In a nutshell, the bound (3) implies that the Dean–Kawasaki equation can be used as a “recipe” for accurate simulations of density fluctuations in systems of diffusing particles.
Note that our scaling regime (4) is not an actual restriction in the context of numerical simulations; it ensures that the average number of particles per cell is strictly larger than one. In fact, in the opposite regime \(h\le N^{-1/d}\), the direct simulation of particles would become less expensive than the approximation by the Dean–Kawasaki equation, as the numerical effort for the Dean–Kawasaki equation is strictly larger than \(h^{-d}\).
While the Dean–Kawasaki equation correctly describes the fluctuations around the mean-field limit to arbitrarily large order in \(N^{-1/2}\), the well-known linearised description of fluctuations given by the solution \(\hat{\rho }\) to

is limited to the approximation quality \(d_{weak}(\hat{\rho }-\mathbb {E}[\hat{\rho }],\mu ^N-\mathbb {E}[\mu ^N])\le C N^{-1}\). Here, \(\bar{\rho }\) denotes the mean-field limit given as the solution to
In fact, the linearised description \(\hat{\rho }\) only captures the leading-order fluctuation correction to the mean-field limit correctly and hence carries a relative error of order \(N^{-1/2}\) with respect to the fluctuation scaling. We provide numerical evidence of such difference between the two models, and we also numerically verify convergence rates for suitable discretisations of the Dean–Kawasaki model (1).
1.1 Related Literature
The theory of fluctuating hydrodynamics describes fluctuations in interacting particle systems in the regime of large particle numbers using suitable SPDEs; see e. g. [37]. In its form (1), the Dean–Kawasaki equation describes non-interacting particles, with similar equations being available for weakly interacting particles undergoing overdamped Langevin dynamics. In the recent contribution [12], the authors also address quantitative fluctuation bounds in the non-interacting particle case, but by means of a suitable approximated SPDE model rather than a numerical scheme. While their setting grants several well-posedness results (non-negativity of the solution, comparison principles, entropy estimates) and allows to consider initial particle profiles which are more general than those treated here, their relative fluctuation error is however limited to \(N^{-1/(d/2+1)}\log N\), while the rate of fluctuations in (3) is—in suitable metrics—arbitrarily high.
For a more general particle setting, the SPDE of fluctuating hydrodynamics for the zero range process given by
has been addressed in [11], and linked it to the large deviation principle for such process in a suitable thermodynamic setting. A corresponding well-posedness result for truncated (low spatial frequency) noise and regularised nonlinearity has been obtained in [18], see also [19]. In [20], the construction of random dynamical systems for conservative SPDE is discussed, together with well-posedness theory of invariant measures and mixing of the related Markov process. In [17], a large deviation principle for regularised variants of (6) is shown; in a suitable limit, the rate functional of such large deviations principle and the corresponding one of the interacting particle system are shown to approach each other.
The paper [10], written independently of—and simultaneously to—the present manuscript, gives a rigorous justification of the fluctuating hydrodynamics SPDE associated with the symmetric simple exclusion process
While in contrast to our work the authors in [10] only consider the continuum SPDE, they regularise it by truncating the noise for small spatial wavelengths. In a certain sense, this introduces a regularisation in the same spirit as our numerical approach; however, their truncation criterion is somewhat more restrictive than our condition \(h\gg N^{-1/d}\). While they face a more challenging problem with the more complex noise intensity factor \(\sqrt{\rho (1-\rho )}\) (whose square is not a linear function of the density \(\rho \)) and also prove convergence results for the rate functions for large deviation principles, they only establish a leading-order description of fluctuations in the low deviations regime. In other words, in contrast to our present work, they do not show superiority of fluctuating hydrodynamics to a linearised approach on fluctuations for the “bulk” of the probability distribution.
For recent numerical approaches to fluctuating hydrodynamics, we refer the reader e. g. to [1,2,3, 9, 13, 14, 24, 33, 36] (in particular, [2] contains the extension of the current work to the case of weakly interacting particles). Note that the small prefactor of the noise term in the Dean–Kawasaki equation (1) enables the use of certain higher-order timestepping schemes [22], a fact that we also use in our numerical simulations.
Concerning further mathematical results on Dean–Kawasaki models, the link between fluctuating hydrodynamics and Wasserstein geometry has long been understood, and extensively studied in several works, see for instance [8, 25, 28, 30,31,32, 38].
Dean–Kawasaki type models including the effects of inertia have been derived and analysed by the first author, Shardlow, and Zimmer [4,5,6].
The fluctuation-dissipation relation—implicitly contained for instance in the Dean–Kawasaki equation—may be used to recover macroscopic diffusion properties from fluctuations in finite particle number simulations, see for instance [16, 33]. Outside of the realm of physics, the concept of fluctuating hydrodynamics has also been applied to systems of interacting agents, see e. g. [13, 24, 27].
Finally, conservative stochastic PDEs have recently been shown to give optimal convergence rates in the mean-field limit approximation of stochastic interacting particle systems, such as those encountered in the stochastic gradient descent methods for overparametrised, shallow neural networks [21].
Remark 1
Given the nature of the metric \(d_{weak,2j-1}\) in (3), it is natural to ask whether or not the high-order fluctuation error of (3) could be formally derived from suitable a priori estimates of negative Sobolev type for the continuous Dean–Kawasaki model (1). An a purely formal level, testing the mild formulation of (1)
where G is the heat semigroup kernel—with trigonometric functions, and performing elementary computations, one arrives at the a priori estimate
which is valid in the regime \(j>d/2\).
Despite its formal validity—which, however, relies on the non-trivial negativity requirement for the density \(\rho \)—the inequality (8) does not give any information beyond the leading order \(N^{-1}\), and therefore is too weak an estimate to justify the high-order fluctuation error bound in (3).
2 Main Results and Summary
The methodology of this paper can be applied to several standard numerical discretisations of the Dean–Kawasaki model (1), including finite difference and finite element schemes. In the interest of brevity, we only focus on a finite difference discretisation: The corresponding results in the finite element case are given in Appendix B. Specifically, on the periodic domain \(\mathbb {T}^d:=[-\pi ,\pi )^d\), we denote the uniform square grid with spacing h by \(G_{h,d}\), the discrete inner product of \(L^2(G_{h,d})\) by \((\cdot ,\cdot )_h\), the interpolating operator on \(G_{h,d}\) by \(\mathcal {I}_h\), and define the distance \(d_{-j}[\varvec{X},\varvec{Y}]\) between two \(\mathbb {R}^M\)-valued random variables as
Our first main result reads as follows:
Theorem 2
(Accuracy of description of fluctuations by the finite-difference discretised Dean–Kawasaki model of order \(p+1\in \mathbb {N}\)) Assume the validity of Assumption FD1 (discretised differential operators), Assumption FD2 (Brownian particle system), Assumption FD3 (scaling assumptions), and Assumption FD4 (discretised mean-field limit), all given below. In particular, assume that the mean-field limit \(\overline{\rho }_{h}\) in (20) satisfies \( \rho _{min}\le \overline{\rho }_h \le \rho _{max}\) for some positive \( \rho _{min},\rho _{max}\) on [0, T]. Let \(\rho _h\) be the solution of the discretised Dean–Kawasaki model given in Definition FD-DK on [0, T]. Set
Then, for any \(j\in \mathbb {N}\), the discrete Dean–Kawasaki model FD-DK captures the fluctuations of the empirical measure \(\mu ^N\) in the sense that, for any \(\varvec{T}=(T_1,\ldots ,T_M)\in [0,T]^M\) with \(0\le T_1\le \dots \le T_M\), the inequality
holds for any \(\varvec{\varphi }=(\varphi _1,\dots ,\varphi _M)\in [W^{p+\Theta +j+1,\infty }(\mathbb {T}^d)]^M\) such that \(\Vert \varphi _m\Vert _{L^2}=1, \forall m=1,\dots ,M\) and \(\int _{\mathbb {T}^d}{\varphi _k\varphi _l\text{ d } \varvec{x}}=0\) whenever \(T_k=T_l\). Finally, we have the a posteriori bound
where we have set
We make some observations in order to better illustrate the meaning of Theorem 2.
-
The quantities \((\rho _h(T_m),{\mathcal {I}}_h\varphi _m)_h\), and \(\langle \mu _{T_m}^N, \varphi _m\rangle \) are rescaled with the factor \(N^{1/2}\), as the natural order of density fluctuations is \(N^{-1/2}\). In other words, our main error estimate basically provides an estimate for the relative error in the fluctuations.
-
The distances \(d_{-j}[\varvec{X},\varvec{Y}]\) correspond to negative Sobolev norm differences of the probability measures on \({\mathbb {R}}^M\) given by the laws of \(\varvec{X}\) and \(\varvec{Y}\). In particular, it holds \(d_{-1}[\varvec{X},\varvec{Y}]={\mathcal {W}}_1[\varvec{X}-{\mathbb {E}}[\varvec{X}],\varvec{Y}-{\mathbb {E}}[\varvec{Y}]]\), where \({\mathcal {W}}_1\) is the 1-Wasserstein distance.
-
The above estimates contain three types of error terms. The term \( \textrm{Err}_{neg}\) quantifies the a priori lack of knowledge concerning non-negativity of the solution \(\rho _h\); the term \( \textrm{Err}_{num}\) encodes the numerical precision of the scheme; finally, the term \(\textrm{Err}_{fluct,rel}\) bounds the relative error in the fluctuations.
-
The order of differentiation required for the functions \(\varvec{\varphi }\) should be thought of as the sum of \(p+2+\Theta \) (accounts for the requirements of the spatial discretisation, discussed below) and \(j-1\) (necessary due to an induction argument over j).
If one is only interested in moment bounds (i.e., in a polynomial \(\psi \)) then the following estimate with no relative error in the fluctuations can be produced:
Theorem 3
(Estimates on the error for stochastic moments) In the same setting of Theorem 2, fix times \(\varvec{T}=(T_1,\dots ,T_M)\in [0,T]^M\), a vector \({\varvec{j}}=(j_1,\dots ,j_M)\) with \(j:=|{\varvec{j}}|_1=\sum _{m=1}^{M}{|j_m|}\), and a vector \(\varvec{\varphi }=(\varphi _1,\dots ,\varphi _M)\in [W^{p+j+1+\Theta ,\infty }]^M\).
Then the difference of moments between \(\rho _h\) and the empirical density \(\mu ^N\) (2) reads
with constants \(C,C_1,\dots ,C_4>0\) independent of j, h, N, T, and where we have the bound
where \({\mathcal {E}}\!\left( N,h\right) \) has been defined in (11).
2.1 Structure of the Paper
Section 3 lays out the finite difference discretisation of the Dean–Kawasaki model. Section 3.1 (respectively, Section 3.2) lays out the necessary notation (respectively, the relevant assumptions and definitions) related to the model. Section 3.3—which has an informal flavour—brings forward some of the main ideas used in the paper. This section lays the ground for Section 3.4 (respectively, Section 3.6), which contains preparatory results for the proofs of Theorem 2 (respectively, Theorem 3). The proof of Theorem 2 (respectively, Theorem 3) is finalised in Section 3.5 (respectively, Section 3.7). Technical details are deferred to Section 3.8 (bounds for all moments of \(\rho _h\), and exponentially decaying bound for the negative part \(\rho ^-_h\)), and Appendix A (deterministic finite difference arguments and relevant Itô calculus). The statements of results for finite element schemes are given in Appendix B. Finally, Section 4 contains numerical simulations associated with Theorem 2, using a first-order finite difference discretisation (i.e., \(p=1\)) in the one-dimensional case \(d=1\).
3 Analysis for Finite Difference Discretisations
3.1 Notation
Domain and Function Spaces Let \({\mathbb {N}}\ni d\le 3\), and let \({\mathbb {T}}^d:=[-\pi ,\pi )^d\). Let \(h:=2\pi /L\), for some \(L\in 2{\mathbb {N}}\), be the discretisation parameter of the periodic square grid
We always work with periodic functions (defined either on \({\mathbb {T}}^d\) or \(G_{h,d}\)). From now on, this fact will be implicitly assumed and no longer stated. In particular, we abbreviate \(C^{\beta }=C^{\beta }({\mathbb {T}}^d)\) and \(W^{r,p}=W^{r,p}({\mathbb {T}}^d)\). We use bold characters to denote vector fields.
For \(m\in {\mathbb {N}}\), let \([L^2(G_{h,d})]^m\) be the space of \({\mathbb {R}}^m\)-valued functions defined on \(G_{h,d}\). Such space is endowed with the inner product
and admits an orthonormal basis \(\{\varvec{e}^m_{\varvec{x},\ell }\}_{(\varvec{x},\ell )\in (G_{h,d},\{1,\dots ,m\})}\), whose elements are defined as
where \(\{\varvec{f}_{\ell }\}_{\ell =1}^{d}\) is the canonical basis of \({\mathbb {R}}^d\). If \(m=1\), the notation is stripped down to
Interpolator Operator For \(\varvec{\phi }\in [C^0]^m\), we define \({\mathcal {I}}_{h}\varvec{\phi }\in [L^2(G_{h,d})]^m\) as the function agreeing with \(\varvec{\phi }\) on \(G_{h,d}\). When there is no ambiguity, we simply write \(\varvec{\phi }\) instead of \({\mathcal {I}}_h\varvec{\phi }\).
Discrete Differential Operators We use the notation \(\partial _{h,x_\ell }\) to denote a finite difference operator approximating the partial derivative \(\partial _{x_\ell }\). We denote by \(\nabla _h:=[\partial _{h,x_{1}},\dots ,\partial _{h,x_{d}}]\) the associated finite difference gradient operator. Furthermore, for each \(\ell \), we define the discrete second partial derivative \(D^2_{h,x_{\ell }}\) as the operator for which the standard integration by parts formula
holds, where \(D_{h,x_{\ell }}\) is some (possibly different) finite difference operator approximating the partial derivative \(\partial _{x_\ell }\). We abbreviate \(\nabla _{D,h}:=[D_{h,x_{1}},\dots ,D_{h,x_{d}}]\). As a result of (13), the discrete operators \(D^2_{h,x_\ell }\) are symmetric (in the sense of finite difference operators). We abbreviate
to indicate the discrete Laplace operator. Specific details on \(\nabla _h\) and \(\Delta _h\) will be provided in the next subsection.
Remark 4
The operators \(\nabla _{h}\) and \(\nabla _{D,h}\) (both providing an approximation of the continuous gradient \(\nabla \)) may be different, and have different uses in our discretised Dean–Kawasaki model (Definition FD-DK below). The operator \(\nabla _{h}\) is deployed in the noise, while the operator \(\nabla _{D,h}\) in the integration by parts formula (13).
For reasons which will become clear in Section 3.3 (see Block 3 therein), we set the notation for suitable continuous and discrete backwards heat flows. Specifically, for a sufficiently regular function \(\varphi \) and a final time T, we denote by \(\phi ^t\) the solution the continuous backwards heat equation
with final datum \(\phi ^T=\varphi \). Analogously, we denote by \(\phi _h^t\) the solution to the discrete backwards heat equation
with final datum \(\phi _h^T={\mathcal {I}}_h\varphi \). In the following, we also use the alternative notation \({\mathcal {P}}^z(\varphi ):=\phi ^{T-z}\) (respectively, \({\mathcal {P}}_h^z({\mathcal {I}}_h\varphi ):=\phi _{h}^{T-z}\)), to stress that \({\mathcal {P}}^z(\varphi )\) (respectively, \({\mathcal {P}}_h^z({\mathcal {I}}_h\varphi )\)) is the result of evolving a backwards heat equation (respectively, a discrete backwards heat equation) starting from \(\varphi \) (respectively, from \({\mathcal {I}}_h\varphi \)) for a timespan z.
For \(y\in {\mathbb {R}}\), we define \(y^{+}:=\max \{y;0\}\) and \(y^{-}:=-\min \{y;0\}\). In addition, as usual, we use the letter C to denote a generic constant, whose value may change from line to line in the computations.
3.2 Assumptions and Discretised Dean–Kawasaki Model
Assumption FD1
(Discrete differential operators) Let \(p\in {\mathbb {N}}\) be fixed. We make the following assumptions on the discrete operators \(\partial _{h,x_\ell }\) and \(D^2_{h,x_\ell }\):
-
the discrete operators \(\partial _{h,x_\ell }\) and \(D^2_{h,x_\ell }\) are finite difference operators of order \(p+1\). Explicitly, this means that
$$\begin{aligned} \left| \partial _{h,x_\ell }{\mathcal {I}}_{h}{\phi }(\varvec{x})-\partial _{x_\ell }\phi (\varvec{x})\right|&\le C\Vert \phi \Vert _{C^{p+1}}h^{p+1},\qquad \varvec{x}\in G_{h,d},\qquad \ell \in \{1,\dots ,d\}, \end{aligned}$$(16)$$\begin{aligned} \left| D^2_{h,x_\ell }{\mathcal {I}}_{h}{\phi }(\varvec{x})-D^2_{x_\ell }\phi (\varvec{x})\right|&\le C\Vert \phi \Vert _{C^{p+2}}h^{p+1},\qquad \varvec{x}\in G_{h,d},\qquad \ell \in \{1,\dots ,d\}, \end{aligned}$$(17)for any \(\phi \in C^{p+2}({\mathbb {T}}^d)\);
-
The operators \(\partial _{h,x_\ell }\) and \(D^2_{h,x_\ell }\) commute.
Assumption FD2
(Brownian particle system and initial datum of Dean–Kawasaki dynamics) Let p be as in Assumption FD1. We assume to have \(N\in {\mathbb {N}}\) independent d-dimensional Brownian motions \(\{\varvec{w}_k\}_{k=1}^{N}\) moving in \({\mathbb {T}}^d\). Moreover:
-
the initial positions \(\{\varvec{w}_k(0)\}_{k=1}^{N}\) are deterministic;
-
there exists a deterministic function \(\rho _{0,h}\in L^2(G_{h,d})\) (which will serve as the initial datum of the discretised Dean–Kawasaki dynamics in Definition FD-DK below), satisfying the following properties:
-
there exist h-independent constants \( \rho _{min}\) and \(\rho _{max}\) such that
$$\begin{aligned} 0< \rho _{min}\le \rho _{0,h} \le \rho _{max}; \end{aligned}$$ -
the empirical density of the initial configuration \(\mu ^N_0:=N^{-1}\sum _{k=1}^{N}{\delta _{\varvec{w}_k(0)}}\) approximates \(\rho _{0,h}\) with accuracy \(p+1\), in the sense that the inequality
$$\begin{aligned}&\left| \langle \mu ^N_0,\eta \rangle - (\rho _{0,h},{\mathcal {I}}_h\eta )_h\right| \nonumber \\&\quad = \left| N^{-1}\sum _{k=1}^{N}{\eta (\varvec{w}_k(0))} - (\rho _{0,h},{\mathcal {I}}_h\eta )_h\right| \le Ch^{p+1}\Vert \eta \Vert _{C^{p+1}}, \end{aligned}$$(18)holds for each function \(\eta \in C^{p+1}\).
-
Assumption FD3
(Scaling of relevant parameters) We assume the scaling
for some \(T>0\), and where \(\rho _{min}\) and \(\rho _{max}\) have been introduced in Assumption FD2. This scaling will be needed to produce an exponentially decaying estimate associated with \(\rho _h^{-}\), see (66) below.
Assumption FD4
(Mean-field limit) The solution to the discrete heat equation
is such that \(\rho _{min}\le {\overline{\rho }}_h \le \rho _{max}\) (where \(\rho _{min}\) and \(\rho _{max}\) have been introduced in Assumption FD2) for all times up to T (where T has have been introduced in Assumption FD3).
We can now state the precise definition of our finite difference Dean–Kawasaki model.
Definition FD-DK
(Finite difference Dean–Kawasaki model of order \(p+1\)) Assume the validity of Assumptions FD1–FD4. We say that the \(L^2(G_{h,d})\)-valued process \(\rho _h\) solves a finite difference Dean–Kawasaki model of order \(p+1\) if it solves the system of stochastic differential equations
where \(\{\beta _{(\varvec{y},\ell )}\}_{(\varvec{y},\ell )\in (G_{h,d},\{1,\dots ,d\})}\) are standard independent Brownian motions, and where \({\mathcal {F}}_\rho \in L^2(G_{h,d})\) is defined as
Remark 5
If (20) admits a discrete maximum principle, then Assumption FD4 is satisfied for any \(T>0\) and any non-negative datum \(\rho _{0,h}\). For example, the discrete maximum principle applies for the second-order symmetrical discrete Laplace operator

where \(\varvec{y}\sim \varvec{x}\) indicates that \(\varvec{y}\) and \(\varvec{x}\) are adjacent grid points.
Remark 6
One may also omit the contribution \((1+T)\) in the scaling (19), at the expense of obtaining results with a worse dependency on the final time T. We are not interested in optimising time dependencies in this work, and we simply include the term \(1+T\) in order to get cleaner final results.
3.3 Key Ideas Behind the Proofs of the Main Results
The proofs of Theorems 2 and 3 are of inductive type. In order to simplify their exposition, it is useful to first list a skeleton of the main building blocks.
Block 1. Discrete Dean–Kawasaki model: cross-variation analysis. At their core, both proofs use basic Itô calculus to describe the time evolution of suitable nonlinear functionals \(\psi \) of the quantities
and of their expected values, where \(\phi _h\) and \(\phi \) are suitable test functions. The quantities in (24) are linear functionals of \(\rho _h\) and \(\mu ^N\), respectively. What is crucial, is that the cross-variation of the processes (24) are—up to a small error—also linear functionals of \(\rho _h\) and \(\mu ^N\). The argument for \(\mu ^N\) is straightforward, and we can thus defer it to the proofs themselves. As for \(\rho _h\), we use Definition FD-DK to write
for two different test functions \(\phi _{i,h}\), \(i\in \{1,2\}\). Using the Itô formula and the Parseval identity in \([L^2(G_{h,d})]^d\), one finds that the cross-variation of the stochastic noise of (25) is

The first term in (29) is indeed a linear functional of \(\rho _h\). The second term (which we will show to be negligible for suitable scaling regimes, see Section 3.8) takes into account the a priori lack of knowledge concerning the non-negativity of solutions to the discrete Dean–Kawasaki model (21). We also stress that the validity of the computations above is independent of the order of the finite difference scheme (i.e., p).
Expression (28) crucially preserves the cross-variation structure associated with the continuous Dean–Kawasaki (1) for nonnegative densities. More precisely, formally testing (1) with a smooth test functions \(\phi _i\), \(i\in \{1,2\}\), gives
where the last inequality if justified by the representation \(\varvec{\xi }=\sum _{\varvec{s}\in {\mathbb {Z}}^d}\varvec{e}_{\varvec{s}}{{\dot{\beta }}}_{\varvec{s}}\), where \(\{\varvec{e}_{\varvec{s}}\}_{{\varvec{s}}\in {\mathbb {Z}}^d}\) is an orthonormal basis of \([L^2({\mathbb {T}}^d)]^d\) and \(\{\beta _{\varvec{s}}\}_{\varvec{s}\in {\mathbb {Z}}^d}\) are independent Brownian motions. The noise cross-variation is then obtained using the Itô formula and the Parseval idendity—this time in \([L^2({\mathbb {T}}^d)]^d\)—to obtain
and thus the cross-variations (31) and (28) are (modulo positive part \(\rho _h^{+}\)) structurally identical.
Block 2. Numerical error. There are two contributions to the numerical error, namely,
-
the difference of initial data \(\mu ^N_0\) and \(\rho _h(0)\), and
-
the difference in the evolution of test functions (say, \(\phi \) and \(\phi _h\)),
and both are proportional to \(h^{p+1}\). While the first contribution has the correct bound by Assumption FD2, the second contribution needs to be estimated: The main difficulty is that the interpolation of the test function arising from the cross-variation of the second quantity in (24) (i.e., \({\mathcal {I}}_h(\nabla \phi _1\cdot \nabla \phi _2)\)) does not coincide—in general—with \(\nabla _{h}\phi _{1,h}\cdot \nabla _h\phi _{2,h}\) (i.e., the cross-variation of the first quantity in (24)). We therefore need to show the bound
in order not to lose h-regularity in consecutive steps of our inductive proofs (more details in Block 5 below). The necessary tools for this task are contained in Section 5.
Block 3. Deterministic dynamics of the test functions. As we are interested only in the analysis of the fluctuations for the Dean–Kawasaki model, it is convenient to choose the deterministic functions \(\psi \), \(\phi \), \(\phi _h\) in such a way that as many drift terms as possible in relevant Itô differentials vanish. This is the reason behind the choice of the backwards heat equation (14) (respectively, (15)) for \(\phi \) (respectively, for \(\phi _h\)), which directly compensates the diffusive nature of the particle system (respectively, of the Dean–Kawasaki model). In practice, this is reflected in the useful equalities (which follow from Lemma 15)
for \(\phi , \phi _h\) as in (14), (15). The discussion for \(\psi \) in the case of Theorem 2 is conceptually analogous, but technically more involved, and is devolved to the proof itself. As for Theorem 3, \(\psi \) is chosen to be static, therefore this discussion does not apply.
We expand these considerations in Appendix A.2.
Block 4. Stretched exponential bounds for centred moments of the particle system and the Dean–Kawasaki solution. This block associates the scaling regime of Assumption FD3 to the validity of the moment bounds
and
where \(T_1,\dots ,T_m\in [0,T]\), and \(\Theta \) was introduced in (10). The difference in the norms of the test functions stems from a difference in underlying mathematical arguments (depending on the circumstance, we will either use the maximum principle or the Sobolev embedding Theorem). The necessary tools for this point are contained in Section A.2.
Block 5. Inductive argument. Block 1 essentially states that computing cross-variations of discrete Dean–Kawasaki models yields linear functionals (24), as well as negligible corrections related to the negative part \(\rho ^{-}_h\). Taking Block 2 also into account, this leads to the following crucial observation.
The Itô correction term in the Itô differential of smooth enough nonlinear functions \(\psi \) applied to (24) and their expected values is a sum of:
-
negligible terms featuring \(\rho ^{-}_h\) and the numerical error, and
-
yet another (possibly different) nonlinear function \({\tilde{\psi }}\) applied to (24) and their expected values.
This property allows to set up both proofs using an induction argument whose inductive step is the change in nonlinear function (from \(\psi \) to \({\tilde{\psi }}\)): the residual terms (featuring \(\rho ^{-}_h\) and the numerical error) are estimated at each step, and are not fed to the next step.
3.4 The Key Step for the Accuracy Estimate for Fluctuations in Theorem 2
For use in the next proposition, we define the two function spaces \({\mathcal {L}}_\text {pow,r}^{q},{\tilde{{\mathcal {L}}}}_\text {pow,r}^{q}\) as
Furthermore, we emphasise that we use the shorthand notations
i.e., we implicitly multiply vectors in an element-wise fashion respectively evaluate vectorial functions by a vector of (time) parameters in an element-wise way.
Theorem 2 will be seen to be an easy consequence of the following crucial proposition and an inductive argument:
Proposition 7
Let \(\mu _t^N\) denote the empirical measure of N independent Brownian particles as defined in (2).
Let \(\rho _h\) be a solution to the Dean–Kawasaki equation discretised using finite differences on a uniform grid (21). Suppose furthermore that Assumption FD1 (details of operators \(\Delta _h\) and \(\nabla _h\)), Assumption FD2 (initial condition on Brownian particle system), Assumption FD3 (scaling assumptions), and Assumption FD4 (positivity-preserving properties of mean-field limit) hold.
Let M, \(p\in {\mathbb {N}}\), \(q\in {\mathbb {N}}\), and \(r\in {\mathbb {N}}_0\). Let \(\psi :{\mathbb {R}}^M\rightarrow {\mathbb {R}}\) satisfy \(\psi \in {\mathcal {L}}_\text {pow,r}^{q+2}\). Let \(\varvec{\varphi } \in [W^{2+p+\Theta ,\infty }]^M\). Finally, let \(\varvec{T}=(T_1,\dots ,T_M)\) such that \(0<T_1 \le \ldots \le T_M\le T\).
Then there exist test functions \({{\tilde{\psi }}}^t_{kl}\), \(\tilde{\varvec{\phi }}^t_{kl}\), \(\psi ^0\), and \(\varvec{\phi }^0\) as well as \(\varvec{{{\tilde{T}}}}_{kl}\in {\mathbb {R}}^{M+1}\) such that
and
hold. Here, \(\tilde{\varvec{\phi }}^t_{kl}\) is subject to the estimate
while, if \(q\ge 2\), \({{\tilde{\psi }}}^t\) is subject to the estimate
Furthermore, \(\textrm{Err}_{num}\) and \(\textrm{Err}_{neg}\) are subject to the estimate
where \({\mathcal {E}}\!\left( N,h\right) \) is defined in (11).
Under the additional assumption that \(\Vert \varphi _k\Vert _{L^2}=1\) and \(\int _{\mathbb {T}^d}\varphi _k \,d \varvec{x}=0\) for all k, that \(\int _{\mathbb {T}^d}\varphi _k \varphi _l \,d \varvec{x}=0\) whenever \(T_k=T_l\), and that
we have the additional bounds
and
as well as
The proof is split into four steps. In Step 1, we provide deterministic estimates of suitable backwards diffusive equations of relevance, as well as basic stochastic estimates associated with the Dean–Kawasaki dynamics FD-DK. Step 2 (respectively, Step 3) is devoted to obtaining (34a) (respectively, (34b)). Step 4 bounds the residual terms \(\textrm{Err}_{num}, \textrm{Err}_{neg}\) in (34b).
Proof of Proposition 7
Step 1: Definitions and Elementary Estimates Let \(\phi _m^t\) satisfy the backwards heat equation (14) subject to \(\phi _m^{T_m}:=\varphi _i\). Define the function \(\psi ^t:{\mathbb {R}}^M\rightarrow {\mathbb {R}}\) by setting \(\psi ^T:=\psi \) and by evolving \(\psi ^t\) backward in time using the backward diffusion equation
The purpose of the definitions of \(\phi ^t_m\) and \(\psi ^t\) will become clear in Step 2 and 3 below. Note that these definitions entail
(where for simplicity we have assumed that the eigenvalues of \(\Lambda \) are nondegenerate; otherwise, we replace the formula by its natural analogue) with
This implies
and thus
Observing that \(|\Lambda |\le C \sup _{t\in [0,T]} \Vert \varvec{\phi }^{t\wedge \varvec{T}}\Vert _{W^{1,\infty }}^2 T\le C \Vert \varvec{\varphi }\Vert _{W^{1,\infty }}^2 T\), we conclude that
Arguing similarly, we deduce
and therefore
Using the estimate (49), under the additional assumptions on the \(\varphi _k\) stated above we infer
whenever \(T_k>t\). This in particular implies (35e). A similar argument yields
whenever \(T_k,T_l>t\).
Now fix \(\eta \in W^{1+\Theta }\). Let \(\eta _h\) satisfy the discrete backwards heat equation (15) subject to \(\eta _h^T:={\mathcal {I}}_h\eta \). We observe that the moment estimate
holds for any \(j\in {\mathbb {N}}\). To see this, we use (21) and deduce that, for any \(t>0\),
where \({\mathcal {M}}_t\) is a martingale satisfying \({\mathbb {E}}[{\mathcal {M}}_t]=0\) and

Doob’s martingale inequality, the moment bound (65), and the estimate
(which is, depending on \(\Theta \), a consequence of either the discrete maximum principle or the Sobolev embedding theorem) yield (41). It is also straightforward to notice that
Furthermore, we write

where \({\mathcal {P}}^{\cdot }\) and \({\mathcal {P}}^{\cdot }_h\) have been introduced in Section 3.1. Term \(T_1\) is bounded using (73), while \(T_2\) is settled using (18) from Assumption FD2. Altogether, this leads to
Step 2: Proof of (34a) Using Itô’s formula and the fact that \( \langle \mu _t^N-{\mathbb {E}}[\mu _t^N], \eta \rangle =\textstyle N^{-1}\sum _{n=1}^N (\eta (\varvec{w}_n(t))-{\mathbb {E}}[\eta (\varvec{w}_n(t))]) \) holds for all \(\eta \in C^0\), we compute
Using the fact that \(\partial _t {\mathbb {E}}[\mu _t^N] = \tfrac{1}{2}\Delta {\mathbb {E}}[\mu _t^N]\), plugging in the equation (14) satisfied by \(\varvec{\phi }^t\), and taking the expected value, we obtain
Integrating in t, recalling that \(\varvec{\phi }^{T}=\varvec{\varphi }\), and plugging in the equation (36) satisfied by \(\psi ^t\), we obtain
We then define \({{\tilde{\psi }}}^t_{kl}:{\mathbb {R}}^{M+1}\rightarrow {\mathbb {R}}\) as
and \(\tilde{\varvec{\phi }}^t_{kl}:{\mathbb {T}^d}\rightarrow {\mathbb {R}}^{M+1}\) as
Moreover, we set \(\varvec{\tilde{T}}_{kl}:=(T_1,\ldots ,T_M,\min \{T_k,T_l\})\). With these definitions, and in view of \(\mu _0^N={\mathbb {E}}[\mu _0^N]\) (which follows from Assumption FD2), equation (46) directly implies (34a).
Furthermore, the estimate (35a) follows immediately from
(which is a consequence of the maximum principle) and the definition of \(\tilde{\varvec{\phi }}^t_{kl}\). Likewise, the estimate (35b) is immediate by the definition of \({{\tilde{\psi }}}^t_{kl}\), the estimate (38), and the definition of the norms \(\Vert \cdot \Vert _{{\mathcal {L}}_\text {pow,r}^{q}}\). Finally, from (39) and the definition of \({{\tilde{\psi }}}^t_{kl}\) we deduce (35e).
Step 3: Proof of (34b). Using Itô’s formula and (21), we infer
Using the fact that \(-\partial _t \phi _{h,k} = \chi _{t\le T_k} \tfrac{1}{2}\Delta _h \phi _{h,k}\) and taking the expected value, we obtain
Using the cross-variation identity (28), we get
Switching to integral notation, using (36) as well as \(\varvec{\phi }_h^T={\mathcal {I}}_h\varvec{\varphi }\), and adding zero, we obtain
Adding zero once more and using the fact that \(\rho _h(0)={\mathbb {E}}[\rho _h(0)]\) (which is a consequence of Assumption FD2), we arrive at
where we have set
as well as
and
Using the definitions (47a) and (47b) and setting \(\text {Err}_{num}:=\text {Err}_{num,1}+\text {Err}_{num,2}\), this yields the representation (34b).
Step 4: Estimates for \(\text {Err}_{neg}\) and \(\text {Err}_{num,i}\) We begin with \(\text {Err}_{neg}\); it is easily seen to be bounded by

This entails (35d). Furthermore, the analogue of (39) for the second derivative, and the time integrability of the singularity \( \{\min _{m:T_m\ge t}(T_m-t)\}^{-1/2} \) entail (35g).
We next note that \({\mathbb {E}}[\rho _h(t)]\) simply solves the discretised heat equation, while \({\mathbb {E}}[\mu _t^N]\) solves the exact heat equation. Using (75), (45), (65), and (41), we obtain

Finally, we deduce from (41), (44), (64) and (73)
Combining (48a) and (48b) with (38) and (65), we infer (35c). Using in addition (39) and (40), we deduce (35f). The proof is complete. \(\square \)
Lemma 8
Let \(0\le T_1\le T_2\le \ldots \le T_M\le T\). Suppose that all \(\varphi _m\) have vanishing average and are normalized in the sense \(\Vert \varphi _m\Vert _{L^2({\mathbb {T}^d})}=1\); suppose furthermore that whenever \(T_m=T_{{{\tilde{m}}}}\), the corresponding \(\varphi _m\) and \(\varphi _{{{\tilde{m}}}}\) are orthogonal to each other in \(L^2({\mathbb {T}}^d)\). Define
Denoting the pseudo-inverse of the (possibly degenerate) nonnegative symmetric matrix \(\Lambda _t\) defined in (37) by \(\Lambda _t^{-1}\), we have the estimate
Proof
To simplify notation, we define \(T_0:=\frac{1}{2}T_1\). Estimating the matrix in (37), writing \(\varphi _k(\varvec{x}):=\sum _{\varvec{n}\in {\mathbb {Z}}^d} a_{k,\varvec{n}} \exp (-i \varvec{n}\cdot \varvec{x})\), and using the fact that \(-\partial _t \phi _k^t = \frac{1}{2}\Delta \phi _k^t\), we get for any \(\varvec{\alpha }\in {\mathbb {R}}^d\)

Using the fact that \(\phi _k^{T_k}=\varphi _k\), that \(\Vert \phi _k^{t}\Vert _{L^2({\mathbb {T}^d})}\le 1\) for all t, that the \(\varphi _k\) have vanishing average, and our assumption on the orthogonality of the \(\varphi _k\) with the same \(T_k\), we deduce
Note that \((\Lambda _t)_{kl}=0\) whenever \(T_k<t\) or \(T_l<t\). This concludes our proof. \(\square \)
3.5 Proof of Theorem 2
For finite difference discretization schemes, Theorem 2 is an easy consequence of Proposition 7.
Proof of Theorem 2 in the finite difference case
Taking the difference of (34b) and (34a) and using (35f) and (35g), we see that Proposition 7 implies
The inequality (40) implies
In case \(j=1\), (51) entails the desired bound by the estimate on \({{{\tilde{\psi }}}}_{kl}^t\) upon replacing \(\psi \) in (50) by its convolution with a mollifier on the scale \(N^{-1/2}\), which we denote by \(\eta _{N^{-1/2}}\). This is a straightforward result of the convolutional inequalities
For \(j>1\), taking the difference of (34b) and (34a), using the bounds (35a), (35c), (35d), and iterating this estimate \(j-1\) times (i. e. using in each step again (34b) and (34a) to estimate the terms of the form
only bounding the terms in \(\Vert {{{\tilde{\psi }}}}_{kl}^t\Vert _{{\tilde{{\mathcal {L}}}}_{pow,r+1}^{2j-2}}\) using (52) in the last step), we deduce
We use estimate (53) in (51) to bound the terms of the form
Therefore, estimate (53) turns into
Finally, we replace \(\psi \) by \(\eta _{N^{-j/2}} *\psi \) in (50) (note that we have \(|\psi -\eta _{N^{-j/2}} *\psi | \le C\Vert D\psi \Vert _{L^\infty } N^{-j/2}\) and \(\Vert D(\eta _{N^{-j/2}}*\psi )\Vert _{{\mathcal {L}}_{pow,r}^m}\le C N^{j/2} \Vert \psi \Vert _{{\mathcal {L}}_{pow,r}^m}\)). This, together with the fact that \({\overline{m}}_{(1/2)T_1}\) is controlled by \(\rho _{min}\), proves Theorem 2 in the case of finite difference discretisations. \(\square \)
3.6 Recursive Step for Theorem 3
In Theorem 2, one is forced to distinguish between the different final times \(T_1,\dots ,T_M\) due to the singular nature of the evolution equation for \(\psi \) (36). In contrast, \(\psi \) is static in Theorem 3: therefore, its proof can be detailed in the (notationally much more convenient) case of equal final times \(T_1=\dots =T_m=T\) without losing in generality.
We first introduce some handy notation. For \(t\le T\), we abbreviate
and
where \(\phi ^t\) (respectively, \(\phi ^t_h\)) solves the backwards heat equation (14) (respectively, the backwards discrete heat equation (15)) with datum \(\varphi \) (respectively, \({\mathcal {I}}_h\varphi \)) at time T. Given a multi-index \({\varvec{j}}=(j_1,\dots ,j_M)\) such that \(|{\varvec{j}}|_1=j\in {\mathbb {N}}\) and a set of smooth test functions \(\varvec{\varphi }=(\varphi _1,\dots ,\varphi _M)\), we abbreviate
and we set
In order to show Theorem 3, we first provide a series of preliminary results.
Lemma 9
(First moments) The first moments of the Dean–Kawasaki model in Definition FD-DK agree with those of the Brownian particle system. Namely, for \(\varphi \in C^1\), we have \(\mathbb {E}\left[ {{\mathcal {S}}_N({\mathcal {I}}_h\varphi ,T,T)}\right] =\mathbb {E}\left[ {{\mathcal {T}}_N(\varphi ,T,T)}\right] =0\), where \({\mathcal {S}}_N\) and \({\mathcal {T}}_N\) have been defined in (54).
Proof
This follows promptly from Lemma 15, as neither \({\mathcal {S}}_N({\mathcal {I}}_h\varphi ,T,t)\) nor \({\mathcal {T}}_N(\varphi ,T,t)\) admits drift. \(\square \)
Lemma 10
(Second moments) Let \(\Theta \) be as in (10). Assume the validity of Assumptions FD1, FD2, FD4, FD3. Fix \(\varphi _1,\varphi _2\in C^{3+p+\Theta }\). Let \(\rho _h\) be as given in Definition FD-DK. Then
where \({\mathcal {S}}_N\) and \({\mathcal {T}}_N\) have been defined in (54), and \({\mathcal {E}}\!\left( N,h\right) \) has been introduced in (11).
Proof
Set \(r_h^t:=\nabla _h\phi _{1,h}^t\cdot \nabla _h\phi _{2,h}^t-{\mathcal {I}}_h\left\{ \nabla \phi _{1}^t\cdot \nabla \phi _{2}^t\right\} \). The Itô differential formula for \({\mathcal {S}}_N(\varphi _1,T,t){\mathcal {S}}_N(\varphi _2,T,t)\) stated in Lemma 15 gives
where \({\mathcal {P}}_h^{\cdot }\) is the solution operator for the discrete backwards heat equation, see Section 3.1. On the other hand Lemma 15 also implies
where \({\mathcal {P}}^{\cdot }\) is the solution operator for the backwards heat equation, see Section 3.1. We get \(A_1=B_1\) since the first (centred) moments agree (see Lemma 9). Furthermore, (66) and (19) grant
The bounds (75) and (19) promptly give

We decompose \(A_2-B_2\) as
where we have also used that \(\rho _h(0)\) is deterministic. The term \(C_1\) is bounded using (18) applied to the function \(\eta :={\mathcal {P}}^t(\nabla \phi _1^t\cdot \nabla \phi _2^t)\), while the term \(C_2\) is dealt with using (73) with choice \(\varphi :=\nabla \phi _1^t\cdot \nabla \phi _2^t\). All together, we obtain the bound
The proof is complete. \(\square \)
Proposition 11
(Recursive formula for higher moments) Let \(\Theta \) be as in (10). Fix \(\varvec{\varphi }=(\varphi _1,\dots ,\varphi _K)\in \left[ C^{p+3+\Theta }\right] ^M\), a vector \({\varvec{j}}=(j_1,\dots ,j_M)\) such that \(|{\varvec{j}}|_1=j\). For each pair \(i,j\in \{1,\ldots ,M\}\), let \({\varvec{j}}^{ij}\) be as defined in Lemma 15. Let \({\mathcal {E}}\!\left( N,h\right) \) be as defined in (11). Assume the validity of Assumptions FD1, FD2, FD4, FD3. We recall the abbreviation for the difference of moments [see (54), (55)]
Then we have the recursive formula
Proof
We use Lemma 15 to deduce
In analogy to the notation of Lemma 10, we define
Let \({\mathcal {P}}^{\cdot }\) (respectively, \({\mathcal {P}}_h^{\cdot }\)) be the solution operator for the backwards heat equation (respectively, for the discrete backwards heat equation), see Section 3.1. We then proceed above as
On the other hand
It is straightforward to notice that \(A_1-B_1\) can be settled using the estimates for the moments of order \(j-1\), as (for each pair k, l) the exponent vector \(\varvec{j}\) is decreased by two units to \(\varvec{j}^{kl}\), while the additional test function \(\nabla \phi ^t_k\cdot \nabla \phi ^t_l\) is picked up. The bound for \(A_3\) relies on the Cauchy-Schwartz inequality, Corollary 17, (19), and (66), and reads

The term \(A_4\) may be bounded as

The difference \(A_2-B_2\) is rewritten as
where equality (60) is valid because the term
is deterministic. The term \(T_1\) is dealt with using the estimates of order \(j-2\) (as, for each k, l, the exponent vector is decreased by two units to \(\varvec{j}^{kl}\)). The term \(T_2\) is settled with the same arguments as for term \(C_2\) in (57), with the additional use of the Hölder inequality and of (92). We obtain
Putting together all the estimates and integrating in time gives (59). \(\square \)
Remark 12
The finite-difference error in (59) accounts for two different errors:
-
the difference between the initial conditions \(\rho _{h,0}\) and the empirical density \(\mu ^N_0\), as well as the difference between the solutions to continuous and discrete backwards heat equations. This is captured in the term \(A_2-B_2\) for the second order moment, and in the term \(T_2\) for higher moments.
-
the difference between \({\mathcal {I}}_h(\nabla \phi _k^t\cdot \nabla \phi _l^t)\) and \(\nabla _{h}\phi _{k,h}^t\cdot \nabla _h\phi _{l,h}^t\). As anticipated in Section 3.3, Block 3, the high-order accuracy of the difference between the solutions to continuous and discrete backwards heat equations relies on the discrete final datum to be the interpolant of the continuous final datum. Since \(\nabla _{h}\phi _{k,h}^t\cdot \nabla _h\phi _{l,h}^t\) does not interpolate \(\nabla \phi _k^t\cdot \nabla \phi _l^t\) in general, we quantify \({\mathcal {I}}_h(\nabla \phi _k^t\cdot \nabla \phi _l^t)-\nabla _{h}\phi _{k,h}^t\cdot \nabla _h\phi _{l,h}^t\).
3.7 Proof of Theorem 3
Step 1: Interpreting (59). The recursive relation (59) may be visualised in the following way:
-
i)
Each moment of order j produces residuals \(\text{ Err}_{neg}\) and \(\text{ Err}_{num}\).
-
ii)
Each moment of order j is linked recursively to a collection of moments of order \(j-1\) (\(A^{j-1}_{recursion}\)) and a collection of moments of order \(j-2\) (\(A^{j-2}_{recursion}\)).
-
iii)
The overall bound for \({\mathcal {D}}({\varvec{j}},\varvec{\varphi },T)\) is given by summing all the residuals for all moments found by exhausting the recursive relation. More specifically, it holds
$$\begin{aligned} {\mathcal {D}}({\varvec{j}},\varvec{\varphi },T) \le \sum _{K=0}^{j-2}{\mathcal {R}}_K, \end{aligned}$$where \({\mathcal {R}}_K\) is the sum of all residuals associated with the moments explored after exactly K steps. Therefore, we only need to suitably control \({\mathcal {R}}_K\) for \(K=0,\dots ,j-2\). In order to do this, we need the following auxiliary bound.
Step 2: Auxiliary bound. At every step of the recursive relation, the sets of test functions which are fed into the lower order terms \(A^{j-1}_{recursion}\) and \(A^{j-2}_{recursion}\) are modifications of the current set of test functions, specifically:
-
in the case of \(A^{j-1}_{recursion}\), one instance for each of two functions \(\varphi _k,\varphi _l\) is replaced by the product \(\nabla \varphi _k \cdot \nabla \varphi _l\);
-
in the case of \(A^{j-2}_{recursion}\), one instance for each of two functions \(\varphi _k,\varphi _l\) is removed from the set of test functions, and a pre-factor \(\Vert \varphi _k\Vert _{C^{1+\Theta }}\Vert \varphi _l\Vert _{C^{1+\Theta }}\) is gained.
It is thus natural to define the object
where r is a given way of exhausting the recursive relation for K steps (i.e., a sequence of K moves dictating whether moments of type \(A^{j-1}_{recursion}\) or \(A^{j-2}_{recursion}\) are explored at each step), where \(\varvec{\psi }_{K,r}\) is the set of test functions after K steps with sequence r, where \(\varvec{j}_{K,r}\) is the corresponding set of powers, and where \(Y_{K,r}\) is the overall pre-factor cumulated from all the moments of type \(A^{j-2}_{recursion}\) for the sequence r.
For each \(\gamma \in {\mathbb {N}}_0\), we have the bound
which is justified by the following observations:
-
The number of occurrences of the original functions \(\varvec{\varphi }\) (i.e., \(\varvec{j}\)) is preserved, regardless of the path r. This is straightforward to verify by direct inspection of how the recursive terms \(A^{j-1}_{recursion}\) and \(A^{j-2}_{recursion}\) handle the test functions.
-
The factor \(j^{2K}\) provides a bound on the product of the number of individual addends making up the functions \(\{\psi _{K,r,m}\}_m\) and of the number of individual addends making up the functions of type \(\psi _{{\tilde{K}},r,m}\) (where \({\tilde{K}}< K\)) found in the term \(Y_{K,r}\). This is a simple consequence of the fact that, whenever a step of type \(A^{j-1}_{recursion}\) is performed, such product can be multiplied by at most \(K\cdot K = K^2\) (i.e., by the product of the maximum lengths of the addends making up the two functions \(\phi _k\) and \(\phi _l\) which give rise to the new test function \(\nabla \phi _k\cdot \nabla \phi _l\)). When a step of type \(A^{j-2}_{recursion}\) is performed, such product does not increase.
-
The factor \( \prod _{m=1}^{M}{\Vert \varphi _m\Vert _{C^{\max \{\gamma ;1+\Theta \}+K}}^{j_m}} \) takes into account the evaluation of the norms for all functions (both \(\{\psi _{K,r,m}\}_m\) and those associated with \(Y_{K,r}\)) by using the most restrictive exponent between \(1+\Theta \) (needed in any step of type \(A^{j-2}_{recursion}\)) and \(\gamma \) (which is the exponent we are interested in), and adding K (to reflect the unitary increment of differentiation entailed by each step of type \(A^{j-1}_{recursion}\)).
-
The term \( j^{(\max \{\gamma ;1+\Theta \}+1)} \) is associated with the pre-factor of the inequality
$$\begin{aligned} \left\| \prod _{i=1}^{\ell }{f_i}\right\| _{C^{\beta }}\le \ell ^{\beta +1}\prod _{i=1}^{\ell }{\Vert f_i\Vert _{C^{\beta }}} \end{aligned}$$applied with \(\ell \le j \) (j is the maximum number of factors in the addends of type \(\prod _{i=1}^{\ell }{f_i}\) making up any function \(\psi _{K,r,m}\) and any function associated with \(Y_{K,r}\)), and with \(\beta = \max \{\gamma ;1+\Theta \}\). The overall pre-factor \(j^{j(\max \{\gamma ;1+\Theta \}+1)}\) results from multiplying \(j^{(\max \{\gamma ;1+\Theta \}+1)}\) by itself j times (j being an upper bound for the total number of functions \(\psi _{K,r,m}\) together with all functions associated with \(Y_{K,r}\)).
Crucially, (61) only depends on K and j, and not on the specific path r.
Step 3: Bounding \({\mathcal {R}}_K\). The quantity \(2^{K}j^{4(K+1)}=2^K\times j^{4K} \times j^4\) is a bound for both the number of residuals of type \(\text{ Err}_{neg}\) and \(\text{ Err}_{num}\) associated with the moments explored after exactly K steps: Such a quantity is the product of \(2^{K}\) (accounting for the recursive splitting of (59) into two families of moments of lower order), of \(j^{4K}\) (accounting for a bound of the pre-factor \(\sum _{k,l=1}^{M}{(j_k-\delta _{kl})j_l/2}\) multypling each of the two families of moments), and of \(j^4\) (accounting for a bound of the pre-factor \(\sum _{k,l=1}^{M}{(j_k-\delta _{kl})j_l/2}\) multypling the residual terms). Using (59) and (61), we obtain
Step 4: Concluding the argument. Since \({\mathcal {D}}({\varvec{j}},\varvec{\varphi },T)\le \sum _{K=0}^{j-2}{{\mathcal {R}}_K}\), we obtain

which—up to trivial rescaling in \(N^{1/2}\)—is precisely (12).
3.8 Exponentially Decaying Estimate for \(\mathbb {E}\left[ {\Vert \rho _h^{-}\Vert ^2_h}\right] \) and Moment Bounds for \(\rho _h\)
Proposition 13
Let the assumptions and notation of the finite difference case of Theorem 2 be in place; in particular, let \(\rho _h\) be a solution to the Dean–Kawasaki equation discretised using finite elements in the sense of (21). Assuming in addition the scaling (19), namely \(h\ge C(d,\rho _{min},\rho _{max})N^{-1/d} |\log N|^{2/d}(T+1)\), we then have the estimate
for any \(B\ge 1\). In particular, we can deduce
for any \(j\ge 1\), as well as
Proof
We split the proof into several steps.
Step 1: energy estimates for test functions. In order to evaluate \(\rho _h(\varvec{x}_0,T)\) at a given point \(\varvec{x}_0\), we choose \(\phi _h(\cdot ,T)\in L^2(G_{h,d})\) as the function satisfying \(( \phi _h(\cdot ,T), \eta _h )_h = \eta _h(\varvec{x}_0)\) for all \(\eta _h\in L^2(G_{h,d})\) and evolve \(\phi _h\) in time by the backward heat equation
By the standard energy estimate for the discrete heat equation we get
Step 2: exponentially decaying bounds for \(|\rho _h-\mathbb {E}\left[ {\rho _h}\right] |(\varvec{x}_0)\) for chosen point \(\varvec{x}_0\). Using (96), (97), and (67), we obtain by the Itô formula for any positive integer j
In particular, \((\rho _h-{\mathbb {E}}[\rho _h], \phi _h )_h\) is a martingale. Integrating in time up to a stopping time \(T_s\) and taking the expected value, we obtain
Choosing \(T_s\) for arbitrary but fixed \(B\ge 1\) as
we get using \(\rho _{max}\ge \rho _{min}\) and the assumption \(|{\mathbb {E}}[\rho _h]|\le \rho _{max}\)

Using Doob’s martingale inequality, we deduce for nonnegative even integers j
Raising both sides to the power j/2 and using Chebyshev’s inequality, we get after optimizing in j
In particular, we deduce by the definition of \(\phi _h(\cdot ,T)\)
Step 3: extending the estimate to finitely many time points in \([0,T\wedge T_s]\). Applying the previous estimate for all \(\varvec{x}_0 \in G_{h,d}\) (there are \(\propto h^{-d}\) of such points), and for all times \(h^\beta \), \(2h^\beta \), \(3h^\beta \), \(\ldots \), for some \(\beta >0\) to be chosen, we obtain
Step 4: extending the estimate to all times in [0, T]. It only remains to pass from the discrete times \(ih^\beta \) to all times t and to remove the restriction to times \(t \le T_S\). Let \(e_k\in L^2(G_{h,d})\) be nodal function satisfying \(e_k(\varvec{x}_j) = \delta _{kj}\). Then the differential
entails, using in a second step also Doob’s maximal inequality and abbreviating \({\mathcal {W}}(\rho _h^+,e_k):= \sum _{(\varvec{y},\ell )\in (G_{h,d},\{1,\dots ,d\})}{\!\!\left( {\mathcal {F}}_\rho \varvec{e}^d_{h,\varvec{y},\ell },\nabla _h e_k \right) _h\text{ d }\beta _{(\varvec{y},\ell )}}\)
Using the triangle inequality for the first term on the right-hand side and a (straightforward but rather pessimistic) estimate on the quadratic variation of \({\mathcal {W}}\), we obtain
By absorption, the triangle inequality, the fact that \(\sum _k 1 \le C h^{-d}\), this implies for \(h\le c(\beta )\)
Using Young’s inequality and absorbing as well as using the fact that for \(ih^\beta \le T_S\) we have \(|\rho _h|\le (B+1) \rho _{max}\), we obtain
For \(\beta \ge 6d+8\) and for all \(h\le c(\rho _{min},\rho _{max})\), we obtain
Step 5: obtaining (63). Overall, from (69) and (70) we conclude
Upon choosing \(h\ge C(d,\rho _{min},\rho _{max}) N^{-1/d} |\log N|^{2/d}(1+T)\), this implies (63).
Step 6: obtaining (64)–(65). For any \(z\ge 0\), we use (63) to write

For a non-negative random variable Z, we know that \(\mathbb {E}\left[ {Z}\right] =\int _{0}^{\infty }{{\mathbb {P}}(Z> z)\text{ d }z}\). We set \(Z:=\sup _{x\in {\mathbb {T}^d},t\in [0,T]} |\rho _h-\mathbb {E}\left[ {\rho _h}\right] |^j(x,t)\) and deduce
where we have used the Gaussian moments estimates in the last inequality, and (64) is proved. Inequality (65) follows from the triangle inequality, the assumption \(\mathbb {E}\left[ {|\rho _h|}\right] \le \rho _{max}\) and (64).
Step 7: obtaining (66). We use the Hölder inequality and the lower bound \(\mathbb {E}\left[ {\rho _h}\right] \ge \rho _{min}\) and obtain (66) via the estimate

\(\square \)
4 Numerical Examples
In this section, we give numerical examples that illustrate that the Dean–Kawasaki equation correctly captures the fluctuations of diffusing non-interacting particles.Footnote 1 We limit our attention to the case \(d=1\).
To compute the motion of N Brownian particles, we perform a direct simulation based on the transition probabilities; this is feasible as our numerical experiments only concern empirical measures \(\mu _t^N\) at two different times \(T_1\) and \(T_2\) (see below). Our discretisation of the Dean–Kawasaki equation is obtained as follows:
-
For the spatial discretisation of the Dean–Kawasaki equation (1), we use the finite difference scheme from Definition FD-DK with order \(p=1\).
-
To discretise the spatially semi-discrete equation in time, we use the (two-step) BDF2 scheme (see, e.g., [22]). The first timestep is performed using an explicit treatment for the noise and a mixed implicit-explicit Euler scheme for the deterministic diffusion.
-
Overall, our discrete scheme for the Dean–Kawasaki equation (1) reads for the first timestep
$$\begin{aligned} \rho _{h}^{\Delta t}&=\rho _{h}^{0}+\Big (\tfrac{1}{4} \Delta _h \rho _h^{\Delta t}+\tfrac{1}{4} \Delta _h \rho _h^{0}\Big )\Delta t\nonumber \\&~~~~ +\sum _{{\varvec{y}\in G_{h,1}}} \nabla _h \cdot \Big (\sqrt{(\rho _{h}^{0})_+} e^1_{\varvec{y}} \Big )\big (\tilde{\beta }_{\varvec{y}}(\Delta t) - {{\tilde{\beta }}}_{\varvec{y}}(0)\big ), \end{aligned}$$(71)and for the \((m+1)\)-th timestep, \(m\ge 1\),
$$\begin{aligned} \rho _{h}^{(m+1)\Delta t}&= \tfrac{4}{3}\rho _{h}^{m\Delta t}-\tfrac{1}{3}\rho _{h}^{(m-1)\Delta t} +\tfrac{2}{3} \Delta _h \rho _h^{(m+1)\Delta t} \Delta t \nonumber \\&\quad -\tfrac{1}{3}\sum _{{\varvec{y}\in G_{h,1}}} \nabla _h \cdot \Big (\sqrt{(\rho _{h}^{(m-1)\Delta t})_+} {e}^1_{\varvec{y}} \Big )\big ({{\tilde{\beta }}}_{\varvec{y}}(m\Delta t) - {{\tilde{\beta }}}_{\varvec{y}}((m-1) \Delta t)\big ) \nonumber \\&\quad + \sum _{{\varvec{y}\in G_{h,1}}} \nabla _h \cdot \Big (\sqrt{(\rho _{h}^{m\Delta t})_+} e^1_{\varvec{y}} \Big )\big (\tilde{\beta }_{\varvec{y}}((m+1)\Delta t) - {{\tilde{\beta }}}_{\varvec{y}}(m \Delta t)\big ), \end{aligned}$$(72)where \((\beta _{\varvec{y}})\) are independent Brownian motions.
-
We place the initial positions \(\{\varvec{w}_k(0)\}_{k=1}^N\) of the Brownian particles only at grid points of \(G_{h,1}\). Consequently, we define the initial condition \(\rho _h(0)\) by requiring that the equality \(\langle \mu ^N_0, \eta \rangle = (\rho _h(0),{\mathcal {I}}_h\eta )_h\) holds for any test function \(\eta \). This way, we avoid any error caused by deviating initial conditions.
-
As we are primarily interested in scaling in h and N, we make the following choices:
-
we set the time-step \(\Delta t:=0.001\), which, according to our numerical convergence tests, is small enough for the spatial discretisation error to dominate over the time error, and
-
we keep the discretisation parameter h above or equal to the threshold \(2\pi \cdot 2^{-7}\approx 0.05\), so that the finite difference error dominates over the error associated with the negative part of \(\rho _h\) (Figs. 1, 2).
-

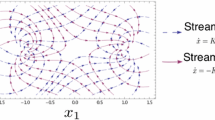
Top: A plot of the initial datum \(\rho _0(x):=1/2+|\sin (\tfrac{x-\pi }{2})|^{1/2}\) (dashed red line), its deterministic evolution by the heat equation at time \(T_1:=0.4\) (dashed black line), and a sample path from the Dean–Kawasaki equation at time \(T_1:=0.4\) for \(N:=8137\) particles (blue solid line). Bottom: The test functions \(\varphi _1\), \(\varphi _2\) used for the moment computations (blue solid line, red dotted line) (colour figure online)

Top Left: A plot of the initial datum \(\rho _0(x):=3-2e^{-\sin ^8(x/2)/0.03}\) (black solid line), its deterministic evolution by the heat equation at time \(T_1:=0.4\) (dashed red line), a sample path from the Dean–Kawasaki equation at time \(T_1:=0.4\) for \(N:=2011\) particles (blue solid line), and a sample path from the linearised Dean–Kawasaki equation at time \(T_1:=0.4\) (pink solid line). Top Right: same as Top Left, but with \(N=4096\). Bottom: The test functions \(\varphi _1\), \(\varphi _2\) used for the moment computations (blue solid line, red dotted line). More specifically, \(\varphi _1=\rho _0(x)\) while \(\varphi _2(\cdot )\approx |\nabla \varphi _1(\cdot ,T/4)|^2\) (colour figure online)

Top: A plot of the initial datum \(\rho _0(x):=3-2e^{-\sin ^6(x/2)/0.05}\) (dashed red line), its deterministic evolution by the heat equation at time \(T_1:=0.4\) (dashed black line), and a sample path from the Dean–Kawasaki equation at time \(T_1:=0.4\) for \(N:=8211\) particles (blue solid line). Bottom: The test functions \(\varphi _1\), \(\varphi _2\) used for the moment computations (blue solid line, red dotted line) (colour figure online)

A log–log plot of the error \(|M_{j_1,j_2}^{DK}-M_{j_1,j_2}^{Brownian}|\) in the numerical examples illustrated in Fig. 3 (top, with \(T_1:=0.4\), \(T_2:=0.32\), and particle number \(N=8211\)) respectively for the numerical examples illustrated in Fig. 1 (bottom, with \(T_1:=0.4\), \(T_2:=0.32\), and particle number \(N=524291\)). It is clearly visible that (after an initial preasymptotic region) a second-order convergence rate \(O(h^2)\) is achieved for all computed moments

A log–log plot of the error \(|M_{j_1,j_2}^{DK}-M_{j_1,j_2}^{Brownian}|\) for the numerical examples in Fig. 3 for varying values of N (with \(T_1:=0.4\), \(T_2:=0.32\), and \(h=0.098175\)). Note that the relative error in the computation of the moments \(M_{j_1,j_2}^{Brownian}\) that is achieved by the discretized Dean–Kawasaki equation is basically independent of the particle number N: The errors decay essentially uniformly according to the rate \(N^{-\frac{j_1+j_2}{2}}\), which coincides with the rate of decay of the moments \(M_{j_1,j_2}^{Brownian}\)

A log–log plot comparing the error \(|M_{j_1,j_2}^{DK}-M_{j_1,j_2}^{Brownian}|\) for the Dean–Kawasaki model (continuous lines) and the linearised Dean–Kawasaki model (dotted lines), in the context of the numerical examples illustrated in Fig. 2 for varying values of h (with \(T_1:=0.4\), \(T_2:=0.2\), and either \(N=2011\) (Top) or \(N=4096\) (Bottom)). We observe that the discretised Dean–Kawasaki model outperforms—to a good extent—the linearised version for the moment associated with \((j_1,j_2)=(2,1)\)
Using a Monte-Carlo approach with \(M\gg 1\) realizations, we next computed the centered stochastic moments
for test functions \(\varphi _1\), \(\varphi _2\), times \(T_1\), \(T_2\), and integer exponents \(j_1,j_2\) specified below. We then compared these stochastic moments to the corresponding centered stochastic moments of the empirical density \(\mu ^N\)
the latter being also computed by a Monte Carlo approximation with M realizations.
We have performed various simulations in order to assess the convergence of the moments with respect to h, N, and to compare the discretisations to the linearised Dean–Kawasaki model (5) and to the Dean–Kawasaki model (1).
4.1 Moment Error Decay (With Respect to h)
For two different choices of initial data \(\rho _0(x)\), test functions \(\varphi _i(x)\), and times \(T_i\), the resulting errors
have been plotted in Fig. 4 as a function of the discretisation parameter h. We clearly observe a convergence rate \(O(h^2)\) for the accuracy of the computed moments.
4.2 Moment Error Decay (With Respect to N)
In Fig. 5, we have plotted the error \(|M_{j_1,j_2}^{DK}-M_{j_1,j_2}^{Brownian}|\) as a function of the particle number N. We observe that the absolute error decays with the same rate \(N^{-(j_1+j_2)/2}\) as the centered moments \(M_{j_1,j_2}^{Brownian}\), i. e. our relative error is basically independent of the particle number N and only depends on the grid size h.
4.3 Comparison with Linearised Dean–Kawasaki Model (5)
For the same choice of initial data \(\rho _0(x)\), test functions \(\varphi _i(x)\), and times \(T_i\), and two different choices of N, we investigate the difference of performance between the time-discretised Dean–Kawasaki model (71)-(72) and the equivalent scheme associated with the linearised Dean–Kawasaki model (5) (whose discretisation is obtained as a straightforward adaptation of (71)-(72)).
More precisely, we have plotted both
and
where \(M_{j_1,j_2}^{DK,linearised}\) is the natural counterpart to \(M_{j_1,j_2}^{DK}\), in Fig. 6 as a function of the discretisation parameter h.
We observe that the two models show the same behaviour for the second moment associated with the exponents \((j_1,j_2)=(2,0)\). This is expected, as both models share the same quadratic variation structure of the noise (more explicitly, one can readapt Lemma 10 to the linearised case). On the contrary, the nonlinear model visibly outperforms the linearised model for the higher moment associated with \((j_1,j_2)=(2,1)\). The reason for this is that one can not readapt Proposition 11 to the linearised case, as doing so would result in lower order moments comprising both the Dean–Kawasaki solution and its mean-field limit, thus breaking the very recursive structure of the Proposition.
We have chosen a relatively low number of particles N a particular couple of test functions (with \(\varphi _2\) approximately matching the quadratic variation associated with the second test function after some time, i.e., \(\varphi _2\approx \nabla |\varphi _1(T/4)|^2\), thus giving non-trivial correlation between \(\varphi _1\) and \(\varphi _2\)) in order to make the difference between the two models more pronounced. Such difference is not completely clear cut though, as one can see for the lowest values of h in the bottom figure. This behaviour is likely caused by:
-
the reduced accuracy of the BDF2 integration method for low h;
-
in the case of Fig. 6 (Bottom), an accuracy saturation.
Data availability Statement
The datasets generated and analysed during the current study are available from the corresponding author on reasonable request.
Notes
The datasets generated and analysed during the current study are available from the corresponding author on reasonable request.
References
Banas, L., Gess, B., Vieth, C.: Numerical approximation of singular-degenerate parabolic stochastic pdes. arXiv preprint arXiv:2012.12150, 2020
Cornalba, F., Fischer, J., Ingmanns, J., Raithel, C.: Density fluctuations in weakly interacting particle systems via the Dean–Kawasaki equation. arXiv preprint arXiv:2303.00429, 2023
Cornalba, F., Shardlow, T.: The regularised inertial Dean-Kawasaki equation: discontinuous galerkin approximation and modelling for low-density regime. arXiv preprint: arxiv:2207.09989, 2022
Cornalba, F., Shardlow, T., Zimmer, J.: A regularized Dean–Kawasaki model: derivation and analysis. SIAM J. Math. Anal. 51(2), 1137–1187, 2019
Cornalba, F., Shardlow, T., Zimmer, J.: From weakly interacting particles to a regularised Dean–Kawasaki model. Nonlinearity 33(2), 864–891, 2020
Cornalba, F., Shardlow, T., Zimmer, J.: Well-posedness for a regularised inertial Dean–Kawasaki model for slender particles in several space dimensions. J. Differential Equations 284, 253–283, 2021
Dean, D.: Langevin equation for the density of a system of interacting Langevin processes. J. Phys. A 29, L613–L617, 1996
Dello Schiavo, L.: The Dirichlet–Ferguson diffusion on the space of probability measures over a closed Riemannian manifold. Ann. Probab. 50(2), 591–648, 2022
Delong, S., Griffith, B.E., Vanden-Eijnden, E., Donev, A.: Temporal integrators for fluctuating hydrodynamics. Phys. Rev. E 87, 033302, 2013
Dirr, N., Fehrman, B., Gess, B.: Conservative stochastic PDE and fluctuations of the symmetric simple exclusion process. Preprint, arXiv:2012.02126, 2020
Dirr, N., Stamatakis, M., Zimmer, J.: Entropic and gradient flow formulations for nonlinear diffusion. J. Math. Phys. 57, 081505, 2016
Djurdjevac, A., Kremp, H., Perkowski, N.: Weak error analysis for a nonlinear SPDE approximation of the Dean–Kawasaki equation. arXiv preprint: arxiv:2212.11714, 2022
Djurdjevac Conrad, N., Köppl, J., Djurdjevac, A.: Feedback loops in opinion dynamics of agent-based models with multiplicative noise. Entropy 24(10), 1352, 2022
Donev, A., Vanden-Eijnden, E., Garcia, A., Bell, J.: On the accuracy of finite-volume schemes for fluctuating hydrodynamics. Commun. Appl. Math. Comput. Sci. 5(2), 149–197, 2010
Elman, H.C., Silvester, D.J., Wathen, A.J.: Finite Elements and Fast Iterative Solvers: With Applications in Incompressible Fluid Dynamics. Oxford University Press, USA (2014)
Embacher, P., Dirr, N., Zimmer, J., Reina, C.: Computing diffusivities from particle models out of equilibrium. Proc. R. Soc. A: Math. Phys. Eng. Sci. 474(2212), 20170694, 2018
Fehrman, B., Gess, B.: Large deviations for conservative stochastic PDE and non-equilibrium fluctuations. Preprint, 2019. arXiv:1910.11860
Fehrman, B., Gess, B.: Well-posedness of nonlinear diffusion equations with nonlinear, conservative noise. Arch. Ration. Mech. Anal. 233(1), 249–322, 2019
Fehrman, B., Gess, B.: Well-posedness of the Dean–Kawasaki and the nonlinear Dawson–Watanabe equation with correlated noise. Preprint, 2021. arXiv:2108.08858
Fehrman, B., Gess, B., Gvalani, R.S.: Ergodicity and random dynamical systems for conservative SPDEs. arXiv preprint arXiv:2206.14789, 2022
Gess, B., Gvalani, R.S., Konarovskyi, V.: Conservative SPDEs as fluctuating mean field limits of stochastic gradient descent. arXiv preprint: arxiv:2207.05705, 2022
Gilsing, H., Shardlow, T.: SDELab: a package for solving stochastic differential equations in MATLAB. J. Comput. Appl. Math. 205(2), 1002–1018, 2007
Hackbusch, W.: \(L_{\infty }\)-convergence of finite element Galerkin approximations for parabolic problems. Ark. Mat. 1–2, 71–95, 1981
Helfmann, L., Conrad, N.D., Djurdjevac, A., Winkelmann, S., Schütte, C.: From interacting agents to density-based modeling with stochastic PDEs. Commun. Appl. Math. Comput. Sci. 16(1), 1–32, 2021
Jack, R., Zimmer, J.: Geometrical interpretation of fluctuating hydrodynamics in diffusive systems. J. Phys. A: Math. Theor. 47, 485001, 2014
Kawasaki, K.: Microscopic analyses of the dynamical density functional equation of dense fluids. J. Stat. Phys. 93, 527–546, 1998
Kim, C., Nonaka, A., Bell, J.B., Garcia, A.L., Donev, A.: Stochastic simulation of reaction-diffusion systems: a fluctuating-hydrodynamics approach. J. Chem. Phys. 146(12), 124110, 2017
Konarovskyi, V., Lehmann, T., von Renesse, M.: On Dean–Kawasaki dynamics with smooth drift potential. J. Stat. Phys. 178(3), 666–681, 2020
Konarovskyi, V., Lehmann, T., von Renesse, M.-K.: Dean–Kawasaki dynamics: ill-posedness vs. triviality. Electron. Commun. Probab., 24, Paper No. 8, 2019
Konarovskyi, V., Marx, V.: On conditioning Brownian particles to coalesce. arXiv preprint: arxiv:2008.02568, 2020
Konarovskyi, V., von Renesse, M.: Reversible coalescing-fragmentating Wasserstein dynamics on the real line. arXiv preprint: arxiv:1709.02839, 2017
Konarovskyi, V., von Renesse, M.-K.: Modified massive Arratia flow and Wasserstein diffusion. Commun. Pure Appl. Math. 72(4), 764–800, 2019
Li, X., Dirr, N., Embacher, P., Zimmer, J., Reina, C.: Harnessing fluctuations to discover dissipative evolution equations. J. Mech. Phys. Solids 131, 240–251, 2019
Nitsche, J.A.: \(L_{\infty }\)-convergence of finite element Galerkin approximations for parabolic problems. RAIRO. Anal. Numér. 13, 31–54, 1979
Quarteroni, A., Valli, A.: Numerical Approximation of Partial Differential Equations, vol. 23. Springer Series in Computational Mathematics. Springer, Berlin (2008)
Russo, A., Perez, S.P., Durán-Olivencia, M.A., Carrillo, P.Y. J. A., Kalliadasis, S.: A finite-volume method for fluctuating dynamical density functional theory. Preprint, 2019. arXiv:1910.05067
Spohn, H.: Large Scale Dynamics of Interacting Particles. Springer, Berlin (2012)
von Renesse, M.-K., Sturm, K.-T.: Entropic measure and Wasserstein diffusion. J. Stat. Phys. 37, 1114–1191, 2009
Acknowledgements
We thank the anonymous referee for his/her careful reading of the manuscript and valuable suggestions. FC gratefully acknowledges funding from the Austrian Science Fund (FWF) through the project F65, and from the European Union’s Horizon 2020 research and innovation programme under the Marie Skłodowska-Curie Grant Agreement No. 754411.
Funding
Open access funding provided by Austrian Science Fund (FWF).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Communicated by G. Friesecke.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Standard Estimates for Finite Difference Discretisation
1.1 A.1 Error Bounds for Continuous and Discretised Heat Flows
In order to prove the following lemma, we introduce a minimal amount of tools related to Fourier analysis for functions belonging to \([L^2(G_{h,d})]^m\). This is an adaptation of the contents of [23, Section 2.3]. Set \( I_h:=h^{-1}G_{h,d}=\{-L/2,-L/2+1,\dots ,L/2-1,L/2-1\}^d. \) The discrete Fourier transform of \(\varvec{v}_h\in [L^2(G_{h,d})]^m\) is the periodic function
Furthermore, the function \(\varvec{v}_h\) may be reconstructed as
Lemma 14
Let \(\phi _1\) (respectively, \(\phi _2\)) be the solution to (14) with final datum \(\phi _1^T=\varphi _1\) (respectively, with final datum \(\phi _2^T=\varphi _2\)), for some \(\varphi _1,\varphi _2\in C^{p+2+\Theta }\), where \(\Theta \) is given in (10). Let \(\phi _{1,h}\) (respectively, \(\phi _{2,h}\)) be the solution of (15) with final datum \(\phi _{1,h}^T={\mathcal {I}}_h\varphi _1\) (respectively, with final datum \(\phi _{2,h}^T={\mathcal {I}}_h\varphi _2\)). Assume the validity of Assumption FD1. Then, for \(t\le T\), we have
where C is independent of T.
Proof
We recall the relation \({\mathbb {N}}\ni L=2\pi /h\) and definition \(I_h=h^{-1}G_{h,d}=\{-L/2,-L/2+1,\dots ,L/2-1,L/2-1\}^d\). It is easy to use the continuous and discrete backwards heat equations (14)–(15) to deduce that the Fourier coefficients of \(\phi _i^t\) and \(\phi _{i,h}^t\), \(i\in \{1,2\}\), are
for some functional \(P(h,\varvec{\xi })\). As the discrete Laplacian \(\Delta _h\) is a \((p+1)\)-th order approximation of the true Laplacian with order \(p+1\), it is easy to see that
Furthermore, since \(\Delta _h\) is a symmetric finite difference operator, it is easy to see that P(h, d) is nonnegative. This fact, together with the convexity of the exponential function (which in turn implies the monotonicity of the ratio \((e^{x}-e^{y})/(x-y)\) in either one of the two variables, provided the other one is kept fixed) gives
and therefore

We can deduce that the discrete Fourier expansion of \({\mathcal {I}}_h\phi _i^t\) from (76) is
where we have also used the fact that \({\mathbb {Z}}^d = I_h + L{\mathbb {Z}}^d\). We deduce

Since \({\mathcal {I}}_h\varphi _i=\phi _{i,h}^T\), we carry on in and write

We estimate
where the final step is justified by
which is valid since \(2(p+1)>d\), as \(d\le 3\) and \(p\ge 1\). We continue in (81) as
and (73) is proved.
We adapt the arguments carried out so far and write

After simple algebraic rearrangements in (83), we get
The term \(T_1\) is estimated using (79), giving \(T_1\le Ch^{2(p+1)}\Vert \varphi _i\Vert ^2_{C^{p+2}}\). The term \(T_2\) is estimated by relying on (16), giving \(T_2\le Ch^{2(p+1)}\Vert \varphi _i\Vert ^2_{C^{p+1}}\). As for \(T_3\), we rely on the fact that \(\widehat{\nabla \varphi }_{i}(\varvec{\xi }+L\varvec{z})=-i\varvec{\xi }{\hat{\varphi }}_{i}(\varvec{\xi }+L\varvec{z})\) and write

and (74) is proved. To prove (75), we write
Now let \(\phi \) be the solution to (15) with final datum \(\phi ^T=\varphi \in C^{1+\Theta }\). If (15) admits a discrete maximum principle, then
If (15) does not admit a discrete maximum principle, then we rely on the Sobolev embedding \(H^{s}\subset C^0\), where \(s=d/2+1\), and get
and the last two expressions can be summarised as
We focus on \(T_4\). It is easy to see that

The estimate for \(T_5\) is even more straightforward, and it reads

and (75) is proved. \(\square \)
1.2 A.2 Stretched Exponential Moment Bounds for the Dean–Kawasaki Solution and the Particle System
We compute the Itô differential of the quantities in (54).
Lemma 15
(Itô differential for moments \({\mathcal {S}}_N^{{\varvec{j}}}\) (Dean–Kawasaki model) and \({\mathcal {T}}_N^{{\varvec{j}}}\) (Brownian particles)) Fix \(M\in {\mathbb {N}}\), a multi-index \({\varvec{j}}=(j_1,\dots ,j_M)\), and a set of test functions \(\varvec{\varphi }=(\varphi _1,\dots ,\varphi _M)\in \left[ C^{2}\right] ^M\). For any \((k,l)\in \{1,\dots ,M\}\), denote by \({\varvec{j}}^{kl}\) the vector \({\varvec{j}}\) with both \(j_k\) and \(j_l\) decreased by one unit (if \(k=l\), then \(j_k\) is understood to be reduced by two units). For any \(k\in \{1,\dots ,M\}\), denote by \({\varvec{j}}^k\) the vector \({\varvec{j}}\) with \(j_k\) decreased by one unit. Let \(\rho _h\) be as given in Definition FD-DK. We recall the following definitions
from Section 3.1. Then
and
Proof
All differentials in this proof are with respect to the variable t. We prove (86a) in three steps.
Step 1: Case \(M=|{\varvec{j}}|_1=1\). We just need to compute the differential for \((\rho _h(t),\phi _{1,h}^t)_h-(\rho _h(0),\phi _{1,h}^0)_h\). We use an \(L^2(G_{h,d})\)-expansion and the Itô formula to deduce

Step 2: Case \(M=1\), \(|{\varvec{j}}|_1=j_1>1\). The Itô formula applied to composition of the function \(z\mapsto z^{j}\) with the process \((\rho _h,\phi _{1,h})_h\) gives

Step 3: Inductive step in the index M. Assume the validity of (86a) for some M, some vector of exponents \(\varvec{{\tilde{j}}}\), and some vector of functions \(\varvec{{\tilde{\varphi }}}=(\varphi _1,\dots ,\varphi _M)\). For an additional test function \(\varphi _{M+1}\) with associated cardinality \(j_{M+1}\), define \({\varvec{j}}:=(\varvec{{\tilde{j}}},j_{M+1})\) and \(\varvec{\varphi }:=(\varphi _1,\dots ,\varphi _{M+1})\). We use the Itô formula for the product of the two real-valued processes \(\textstyle {\mathcal {S}}^{\varvec{{\tilde{j}}}}_N({\mathcal {I}}_h\varvec{{\tilde{\varphi }}},T,t) =\prod _{m=1}^{M}{{\mathcal {S}}^{{\tilde{j}}_m}({\mathcal {I}}_h\varphi _m,T,t)} \) and \({\mathcal {S}}^{j_{M+1}}({\mathcal {I}}_h\varphi _{M+1},T,t)\), namely
and take (88) and the inductive hypothesis into account, thus getting
which is as prescribed by (86a). The proof of (86b) is analogous, and we omit it.
\(\square \)
Lemma 16
Let \(\phi \) solve the heat equation (14), with final datum \(\phi ^T=\varphi \) and \(t\le T\). Let \(\rho _h\) be as given in Definition FD-DK. For any \(2\le j\in {\mathbb {N}}\), we have
Proof
It is a straightforward task to modify the computations in (88) by replacing the map \(z\mapsto z^{j}\) with the map \(z\mapsto |z|^{j}\). As a result, we get
Taking the expected value, we obtain

Taking the supremum in time, (90) promptly implies
We prove (89) by induction on j. The case \(j=2\) is easily settled. Now take \(j>2\) and assume the validity of (89) for \(j-1\). We use (91) and close off the proof by the estimate

\(\square \)
Corollary 17
Let \(\Theta \) be as in (10). Let \(\rho _h\) be as given in Definition FD-DK. Given a jndex \({\varvec{j}}=(j_1,\dots ,j_M)\) with \(|{\varvec{j}}|_1=j\) and a set of test functions \(\varvec{\varphi }=(\varphi _1,\dots ,\varphi _M)\in \left[ C^{1+\Theta }\right] ^M\), we have
Proof
Lemma 16 and a multifactor Hölder inequality promptly give the inequality
Inequality (93) is then proved by using (85).
Inequality (92) may be deduced from adapting (90). Namely, using the Itô formula and the maximum principle for the continuous heat equation, we get
We deal with (94) using the same induction argument deployed for (91), and (92) is proved, again following a multifactor Hölder inequality.\(\square \)
Appendix B: Finite Element Discretisations
1.1 B.1. Notation
For \(h>0\), we split \({\mathbb {T}}^d\), \(d=2,3\), according to a standard admissible triangulation \({\mathscr {T}}_h\), namely \( {\mathbb {T}}^d=\bigcup _{K\in {\mathscr {T}}_h}{K}, \) where h bounds the diameter of each polyhedron K. We assume the triangulation to be regular and quasi-uniform (see [15, Chapter 1, Definition 1.30] or [35, Section 3.1]). For \(p\in {\mathbb {N}}\), let \(X^{p}_h\) be the space of continuous finite elements of order p defined on the triangulation \({\mathscr {T}}_h\). Furthermore, let \({\mathcal {R}}_h\) be the Ritz operator [34, (5)]. Finally, the symbol \(\Vert \cdot \Vert \) (respectively, \((\cdot ,\cdot )\)) denotes the standard \(L^2\)-norm (respectively, the standard \(L^2\)-inner product).
1.2 B.2. Assumptions and Dean–Kawasaki Model
Assumption FE1
(Brownian particle system) This is the same as Assumption FD2, but with the interpolation operator \({\mathcal {I}}_h\) replaced by the Ritz operator \({\mathcal {R}}_h\).
Assumption FE2
(Scaling of parameters) This is the same as Assumption FD3.
Assumption FE3
(Mean-field limit) The solution to the discrete heat equation
is such that \(\rho _{min}\le {\overline{\rho }}_h \le \rho _{max}\) (where \(\rho _{min}\) and \(\rho _{max}\) have been introduced in Assumption FE1) for all times up to T (where T has have been introduced in Assumption FE2).
We now introduce our finite-element discretisation of the Dean–Kawasaki equation (1).
Definition FE-DK
(Finite element Dean–Kawasaki model of order \(p+1\)) We say that the \(X^p_h\)-valued process \(\rho _h\) solves a \((p+1)\)-th order finite element Dean–Kawasaki model if it solves
where \(N^{-1/2}{\mathcal {W}}(\rho _h^+,e_i)\) is a real-valued martingale with quadratic variation given by
Remark 18
Unlike in the finite-difference case, we can only provide an explicit representation of the Dean–Kawasaki noise in the case \(p=1\). This is due to the fact noise is nonlinear, and only preserves piece-wise constant functions (these being gradients of test functions in \(X_h^{p}\), \(p=1\)). We are not aware of any finite-dimensional representation of the martingale term \(N^{-1/2}{\mathcal {W}}(\rho ^+_h,e_i)\) in (96) in the case \(p>1\).
We now present the finite element counterparts of Theorems 2–3.
Theorem 19
(Accuracy of description of fluctuations by the finite element discretised Dean–Kawasaki model of order \(p+1\in {\mathbb {N}}\)) Assume the validity of Assumptions FE1–FE2. Let \(\rho _h\) be the solution of the discretised Dean–Kawasaki model given in Definition FE-DK on the time interval [0, T]. Set
Then, for any \(j\in {\mathbb {N}}\), the discrete Dean–Kawasaki model FE-DK captures the fluctuations of the empirical measure \(\mu ^N\) in the sense that, for any \({\varvec{T}}=(T_1,\ldots ,T_M)\in [0,T]^M\) with \(0\le T_1\le \dots \le T_M\), the following inequality
holds for any \(\varvec{\varphi }=(\varphi _1,\dots ,\varphi _M)\in [W^{p+j+3,\infty }({\mathbb {T}}^d)]^M\) such that \(\Vert \varphi _m\Vert _{L^2}=1\) for all \(m=1,\dots ,M\) and \(\int _{{\mathbb {T}}^d}{\varphi _k\varphi _l\text{ d } \varvec{x}}=0\) whenever \(T_k=T_l\). Finally, we have the bound
where \({\mathcal {E}}\!\left( N,h\right) \) has been defined in (11).
Theorem 20
(Estimates on the error for stochastic moments) In the same setting of Theorem 19, fix times \(\varvec{T}=(T_1,\dots ,T_M)\in [0,T]^M\), a vector \({\varvec{j}}=(j_1,\dots ,j_M)\) with \(j:=|{\varvec{j}}|_1\), and a vector \(\varvec{\varphi }=(\varphi _1,\dots ,\varphi _M)\in [W^{p+j+2,\infty }]^M\).
Then the difference of moments between \(\rho _h\) and the empirical density \(\mu ^N\) (2) reads
for some positive constants \(C,C_1,\ldots ,C_4\) independent of j, h, N, and T, where q is a polynomial vanishing at 0, and where we have the bound
where \({\mathcal {E}}\!\left( N,h\right) \) has been defined in (11).
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Cornalba, F., Fischer, J. The Dean–Kawasaki Equation and the Structure of Density Fluctuations in Systems of Diffusing Particles. Arch Rational Mech Anal 247, 76 (2023). https://doi.org/10.1007/s00205-023-01903-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00205-023-01903-7