
Abstract
The paper presents a transformation of nonlinear MIMO electrical circuit into linear one by a change in coordinates (local diffeomorphism) with the use of a closed feedback loop. The necessary conditions that must be fulfilled by a nonlinear system to make linearizing procedures possible are presented. Numerical solutions of state equations for the nonlinear system and equivalent linearized system are included.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Electrical circuits with concentrated parameters or electro-mechanical systems can be described by a finite number of mutually coupled ordinary differential equations and algebraic relations. Most mathematical models of physical systems are complex. They are characterized by high-order and numerous nonlinearities. A well-known nonlinear model with multiple inputs and multiple outputs which describe its dynamics in the state space can be represented by the following equations:
where: f and gi are smooth vector fields determined on a manifold M = Rn, called state space, h is a smooth mapping specified for the state space M in p-dimensional output space, \( {\mathbf{R}}^{p} ,{\mathbf{h}} :\quad M \to {\mathbf{R}}^{p} \), u(t)—input vector, y(t)—output vector.
The analysis of nonlinear systems (1), especially in dynamic states, is a very difficult task of circuit theory. In most cases, there is no analytical solution of the problem (which is frequently sought) and the information about the current flow and voltage distribution can be obtained using the methods of numerical integration. As shown in Gear [1], Butcher [2], Najm [3], although they are universal and applicable to any number of differential equations, they generate a numerical solution (compiled in the form of tables, graphs, etc.). Therefore, in the search for analytical solutions the transformation of nonlinear description into a linear one by linearization (ensuring local balance of the system dynamics) is very useful in solving practical problems relating to the behaviour of nonlinear circuits.
The methods of differential geometry provide a tool for linearization and decoupling, and decomposition of a system of Eq. (1) to a linear form. The application of geometric approach to solve nonlinear problems initiated by Brockett [4] was used in control theory with observability and controllability of the systems taken into account [5, 6]. The methods of differential geometry allowed the development of efficient techniques for the analysis and synthesis of such systems. The series of publications by Byrnes and Isidori [7], Celikovsky and Nijmeijer [8], Jakubczyk and Respondek [9] which considered the problem of nonlinear transformation of a linear system by changing the coordinates (local diffeomorphism) and using feedback [2, 10, 11] considerably contributed to the development of the techniques mentioned. Furthermore, the problems of transformation of nonlinear systems to linear forms have been widely studied in the literature by Isidori [12, 13], Nijmeijer and van der Shaft [14] Bodson [15], Su [16], and Hunt et al. [17].
As Eq. (1) describes, a nonlinear system in local coordinates x in Rn [where x = (x1, x2, …, xn) is a local coordinate system on a smooth manifold M = Xs ⊃ x], one normally considers a transformation of state variables [12,13,14, 18,19,20] whose operation can be presented as follows:
As a result of the transformation, the state vector in new coordinates assumes the following form:
where: S(x) = [S1(x), S2(x), …, Sn(x)]T is the mapping defined on the open set of Rn space with Rn values.
The transformation of this kind is called diffeomorphism [9, 13]. The necessary and sufficient conditions for the existence of S(x) transformation of nonlinear system into linear one are given in [14]. Transformation S(x) is difficult to find—especially for multidimensional systems so the systems which cannot be globally linearized and are transformed only into quasi-linear systems can be further linearized by the feedback. In this case, a combination of linearization by transformation of state variables and input transformation u(t) using a feedback is applied [11, 21,22,23,24,25]. After transformation involving the change in coordinates and the introduction of the feedback, the state vector in a new coordinate system can be illustrated as follows:
The cited publications indicate that although geometric methods are mainly applied in control theory, they can be also used in other areas, e.g. in the theory of electrical circuits. Such attempts have already been made (for example [26,27,28,29,30]), but they were too few and not exhaustive enough. It appears that geometrical methods can easily find other applications. Since the presented issues are still valid, we attempt to use geometric methods in the theory of electrical circuits. It seems that the results presented can easily find other applications. As the considered issues are still valid, we attempt to use geometrical methods in theory of electrical circuits. Some significant developments have been made in robust feedback linearization in [31,32,33], but most of them are applicable for single-input nonlinear systems or when parametric uncertainties exist. The fact that the there are many more publications analysing SISO systems than those dealing with MIMO systems prompted the authors to use the methods of differential geometry for linearization of a class of nonlinear electrical circuits with multiple inputs (power sources) and multiple outputs.
The paper is organized as follows: Section 2 presents the elements of Lie algebra, used in the construction of a new base of state space. The basic definitions and theorem concerning the conditions to be met by nonlinear system to perform the linearizing procedures are included. Section 3 deals with the construction of linearizing transformation. The effective transformation and digital simulation of mathematical model of nonlinear electrical circuit MIMO showing that linearization is correct are given in Sects. 4 and 5. Conclusions and comments are presented in Sect. 6. The paper ends with a list of references.
2 Preliminaries
Some basic definitions and concepts of differential geometry are presented. Attempts have been made to discuss them in a simplified and compact form. More detailed information can be found in the references [34,35,36].
In the analysis of nonlinear systems, the Lie derivative deserves particular attention. It is the operation involving real-valued function h and vector field f defined on manifold M of \( {\mathbf{R}}^{n} \) space. The result of the operation is a smooth real-valued function defined for each x from M set.
Definition 1
Let h mapping: \( {\mathbf{R}}^{n} \to {\mathbf{R}}^{n} \) be a smooth scalar function of n variables, \( {\mathbf{x}} = (x_{1} , x_{2} , \ldots , x_{n} )^{\text{T}} \in {\mathbf{R}}^{n} \) and \( {\mathbf{f}} :\quad {\mathbf{R}}^{n} \to {\mathbf{R}}^{n} \) a vector field defined on manifold \( M = {\mathbf{R}}^{n} \), then the Lie derivative of scalar function \( h({\mathbf{x}}) = h(x_{1} ,x_{2} , \ldots x_{n} ) \) along the field f is a scalar function given by the formula:
where: \( \otimes \)—stands for gradient; \( \circ \)—stands for scalar product.
For example:
The Lie derivative is a directional derivative of a scalar function along the vector field f.
If g is another vector field defined on the same manifold \( M = {\mathbf{R}}^{n} \) then a derivative of scalar function along the vector field g is defined as follows:
We consider a general case of nonlinear system described by Eq. (1) with m power sources (inputs) and m outputs. The output vector of y(t) system is related to u(t) vector of power sources through state variables and nonlinear equation of state. The task of linearization consists in finding a new vector v(t) of power source (1) such that each m output block depends only on one power source, that is, has the outputs decoupled from the inputs. The terms of decoupling outputs from inputs are given by the definition:
Definition 2
In nonlinear system (1), outputs are decoupled from inputs if the following conditions are satisfied:
-
for each \( i \in \{ 1,\; \ldots ,\;m\} \), yi outputs are invariant with respect to uj input for \( j \ne i \);
-
yi output is not invariant with respect to ui input for \( i \in \{ 1,\; \ldots ,\;m\} \).
The necessary condition for the invariance of outputs is given by the following theorem:
Theorem 1
Let us consider a nonlinear system ( 1 ) with y output invariant with respect to u input. Then, for any \( k \ge 0 \) and for any vector fields \( {\varvec{\uptau}}_{1} ,\;{\varvec{\uptau}}_{2} ,\; \ldots ,\;{\varvec{\uptau}}_{k} \) selected from { f , g 1 , …, g m } we get: \( L_{u} L_{{{\varvec{\uptau}}_{1} }} \ldots L_{{{\varvec{\uptau}}_{k} }} h({\mathbf{x}}) = 0 \) for each x.
Hence, the sufficient condition for decoupling outputs from inputs:
for each \( k \ge 0 \) and \( {\varvec{\uptau}}_{1} ,{\varvec{\uptau}}_{2} , \ldots ,{\varvec{\uptau}}_{k} \in \{ {\mathbf{f}},g_{1} , \ldots ,g_{m} \} . \)
The starting point to determine diffeomorphism S(x) transforming the system (1) into linear system is the definition of a relative degree of the system, sometimes called the characteristic number [12,13,14].
Definition 3
A relative degree r1(x), …, rp(x) of a smooth nonlinear system includes such small natural numbers that for each \( j \in \{ 1, \ldots ,p\} \):
If: \( L_{{\mathbf{g}}} L_{{\mathbf{f}}}^{k} h_{j} ({\mathbf{x}}) = \left( {L_{{g_{1} }} L_{{\mathbf{f}}}^{k} h_{j} ({\mathbf{x}}), \ldots ,L_{{g_{m} }} L_{{\mathbf{f}}}^{k} h_{j} ({\mathbf{x}})} \right) = 0 \)\( \forall \) k ≥ 0 and x \( \forall \) U, it is assumed that \( r_{j} = \infty \).
It should be emphasized that each number ri is associated with the ith output of the hi system. It is also worth noting that by differentiating the yi output with respect to time ri, we obtain:
i.e. ri is the number that tells us how many times the system output yi(t) should be differentiated to obtain the supply ui in “an explicit form”, that is, the linear relation between supply ui and output yi.
Definition 4
Nonlinear system (1) has outputs decoupled from inputs around xo point if there exists such a neighbourhood V of xo for which (7) holds true for each \( {\mathbf{x}} \in V \) and if a relative degree of the system r1, …, rm is finite and constant on V.
It should be pointed out that if the system has outputs decoupled from inputs then for \( {\mathbf{x}} \in {\mathbf{R}}^{n} \) the set \( L_{{{\mathbf{g}}_{i} }} L_{{\mathbf{f}}}^{{r_{i} - 1}} h_{i} ({\mathbf{x}}) \ne 0,\,1 \le i \le m \) contains V. If a nonlinear system does not have outputs decoupled from inputs, a regular static feedback can be used to change it into a system with outputs decoupled from inputs. As a result, we obtain Eq. (7).
Definition 5
Regular static feedback for a nonlinear system (1) is defined by the relation:
where: u = (u1, …, um)T and α: \( M = {\mathbf{R}}^{m} \) and β: \( M = {\mathbf{R}}^{{m{\text{x}}m}} \) are smooth mappings such that matrix \( \beta ({\mathbf{x}}) \) is non-singular for any x, and v = (v1, …, vm) is a new input vector.
Therefore, in order to solve the problem of linearization of the system with multiple inputs and multiple outputs with initial state xo one should find a regular static feedback defined in such neighbourhood V of xo point that each yi output is affected by only one vi input, \( 1 \le i \le m \).
The feedback in this case has the form:
where: E(x)—decoupling matrix and vector b(x) are given by the relations:
Theorem 2
Let us consider a given nonlinear system (1) and the point xo. The necessary and sufficient condition for the solution of input–output linearization problem is the existence of a non-singular matrix E(x) at x = xo, that is, the rank of matrix dim E(xo) = m.
The proof of the theorem is presented in [14].
The method used to determine the transformation S(x) linearizing a nonlinear system (1) and coordinates z(t) of the linearized system is presented in the next section.
3 Determination of transformation linearizing nonlinear MIMO system
Let us consider the following nonlinear system (1) with m inputs and m outputs:
Let outputs be divided into m separable blocks. Let the system have a relative degree r1, …, rm at xo, and let the rank of decoupling matrix E(xo) equal m. Then r1 + ··· + rm ≤ n and for \( 1 \le i \le m \) the transformation of coordinates is written as:
If r = r1+ ··· + rm is less than n it is always possible to find such n – r of functions \( S_{r + 1} ({\mathbf{x}}),\; \ldots \;,\;S_{n} ({\mathbf{x}}) \) that the mapping:
has a Jacobi matrix which is non-singular at xo and therefore determines local coordinates of transformation in the neighbourhood of xo.
To determine a relative degree of a multidimensional system, we differentiate output “j” according to the relation:
If \( L_{{{\mathbf{g}}_{i} }} h_{j} ({\mathbf{x}}) = 0 \) differentiation should be continued for each i until for some natural r in the ith step, we obtain: \( L_{{{\mathbf{g}}_{i} }} L_{{\mathbf{f}}}^{{r_{j} - 1}} h_{j} ({\mathbf{x}}) \ne 0. \)
We differentiate outputs according to a general relation:
Thus if \( L_{{{\mathbf{g}}_{i} }} L_{{\mathbf{f}}}^{{r_{j} - 1}} h_{j} ({\mathbf{x}}) \ne 0 \), the output equation takes the following form:
where: E(x) is a decoupling matrix of m × m dimension described by the relation (13).
As a result, we obtain a relative degree of the system r = r1+ ··· + rp, for \( 1 \le p \le m \).
If \( \det \,{\mathbf{E}}({\mathbf{x}}) \ne 0 \), then E(x) matrix is non-singular and we can determine the feedback linearizing the system. The feedback is described by the following relation (12):
To determine the transformation of state variables S(x), we use Eq. (15), which can be written in the following general relation \( S_{n}^{i} ({\mathbf{x}}) = L_{{\mathbf{f}}}^{k - 1} h_{i} ({\mathbf{x}}) \). Hence, the state variables are given by the system of equations:
Their derivatives are determined as follows:
Thus, new dynamics of a linearized system are described by an m set of the following equations:
The outputs of the system are given by relation (19).
Equations \( \dot{z}_{r + 1}^{i} = q_{r + 1} ,\; \ldots ,\;\dot{z}_{n}^{i} = q_{n} \) in (23) are determined according to the following equations:
The solution of the considered problem is defined locally in the state space for x close to xo, in which the decoupling matrix E(x) is non-singular. It should be noted that non-singularity of the matrix is also a necessary condition for a solution to exist.
4 Example
We consider an indefinite state in an electrical circuit, comprising two power sources and two nonlinear elements, as shown in Fig. 1.

Diagram of nonlinear electrical circuit of the fourth order with two power sources
We assume that the initial state of the circuit is zero (zero initial conditions), and that at t = 0 the switches W1 and W2 are closed simultaneously. Nonlinear current–voltage characteristics of the nonlinear resistive element are described by the second-degree polynomial of the following form:
where: b is a coefficient of \( \left( {\Omega {\text{A}}^{ - 1} } \right) \) dimension.
A nonlinear coil (without losses) is described by the following relation:
where: \( L(i) = (a \cdot i)^{ - 1} \) and a is a coefficient of \( \left( {\Omega {\text{A}}^{ - 1} } \right) \) dimension.
We assume that \( i_{1} = x_{1} ,\;i_{2} = x_{2} ,\;i_{4} = x_{3} ,\;u_{C} = x_{4} \) are state variables and the considered system has the form:
We order variables, adopt the notations: \( 1/L_{2} = k;\;R/L_{2} = c; \) \( b/L_{2} = d;R/L_{1} = w,1/C = l \), and employ the expression for inductance of a nonlinear coil \( L(i_{1} ) = L(x_{1} ) = (a \cdot x_{1} )^{ - 1} \) to obtain a model system of equations:
for which the corresponding vectors \( {\mathbf{f}} ({\mathbf{x}}),{\mathbf{g}}_{1} ({\mathbf{x}}),{\mathbf{g}}_{2} ({\mathbf{x}}) \), \( \left( {{\mathbf{f}},{\mathbf{g}} \in {\mathbf{R}}^{4} ,n = 4} \right) \) have the form:
The equations of response (output) are as follows:
Hence, the output functions have the form:\( h_{1} ({\mathbf{x}}) = x_{3} \) and \( h_{2} ({\mathbf{x}}) = x_{4} \).
In the considered circuit, the outputs y(t) are related to the power supply vector e(t) through state variables and nonlinear equation of state. To solve the problem, we have to find a new power source defined by a regular, static feedback. The first step of linearization is to determine a relative degree of the system according to definition 2. The considered system has two inputs and two outputs. From Eq. (30), we can directly determine differentials of functions h1(x) and h2(x):
Calculating the Lie derivatives of function h(x) along g(x) field for h1(x) function, we get:
Similarly, for function h2(x) we obtain:
As the first derivatives equal zero, we calculate the derivatives of higher orders.
For h1(x) function along g1(x) field, we obtain:
Similarly, for g2(x) we get:
Thus, the relative degree of the subsystem related to function h1(x) is r1 = 2.
For the h2(x) function, we have:
This means that for the h2(x) function, a relative degree of the subsystem is also r2 = 2.
Finally, we obtain that the relative (vector) degree of the considered system is {r1, r2} = {2, 2} for each point x = (x1, x2, x3, x4) at which \( x_{1} \ne 0 \).
Next, we define a decoupling matrix E(x) (13) which has the following form:
The rank of E(x) equals 2.
Since \( \det {\mathbf{E}}({\mathbf{x}}) = - k \cdot w \cdot l \cdot a \cdot x_{1} \ne 0 \), it follows that matrix E(x) is non-singular and it is possible to determine feedback linearizing input–output system:
where: v = [v1, v2]T is a new power source vector.
We can now determine new coordinates of the considered system according to (21):
To find a normal form of the system, we have to determine b(x) vector and E−1(x) matrix from Eq. (32).
Since:
we have to calculate corresponding Lie derivatives of h(x) function along the vector field f(x):
and
Now, the normal form of the linearized system from (22) is written as:
The expression for linearizing feedback (32) can be written as:
Thus, after transformations we get:
For the assumed feedback, the system defined by (23) is described by the following equations:
Also from the structure of power source, it follows that:
In matrix notation, the linearized system has the form:
As a result of linearization, we obtain a decomposed and decoupled linear model of the coordinate system z(t). Each state variable is defined by the differential equation with the right side, represented by the first-degree polynomial of the simplest form. To sum up, we have determined linear form of state equations for the considered system in which the ith output yi depends only on the ith power input vi, for i = 1, 2.
5 Verification of the model and numerical experiments
In order to verify the results obtained a numerical solution of nonlinear equation of state, given by Eqs. (28) and (30), and its linearized model (38, 39) was conducted.
Numerical solution of nonlinear equations of state was carried out for zero initial conditions x(0) = 0, parameters a = b = k = 1, c = 5, d = 10, w = 2, and for inputs e1(t) = e2(t) = 1(t).
Figure 2 presents time characteristics of nonlinear system outputs y1(t) and y2(t).

Time characteristics of nonlinear system outputs y1(t) and y2(t)
To illustrate correct performance of the transformation linearizing a nonlinear system, we compare the obtained simulation results with the results of simulations conducted for Eqs. (38) and (39) linearized by transformation onto original space x(t) = S−1(z(t)). For the purpose of comparison, we conduct the following calculations:
Since: \( z_{1} ({\mathbf{x}}) = x_{3} ;\;\;z_{2} ({\mathbf{x}}) = w \cdot x_{2} - w \cdot x_{3} ;\;\;z_{3} ({\mathbf{x}}) = x_{4} ;\;\;z_{4} ({\mathbf{x}}) = l \cdot x_{2} - l \cdot x_{1} \), then determining the variables of x state we get:
New power sources v1 i v2 are determined from the relation:
Substituting the above relations into linear state equation of a linearized system, we obtain variable characteristics of x state of the original system.
Initial conditions were calculated as follows:
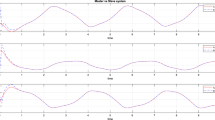
Figure 3 presents time characteristics of outputs y1(t) and y2(t) as shown for a nonlinear system.

Numerical simulation of the solution of the system after transformation onto the original space: x(t) = S−1(z(t))
As S(x) is an algebraic transformation of numerical solutions (time characteristics) of nonlinear systems state equations (Fig. 2), and the corresponding solutions of linearized systems (Fig. 3) overlap. This confirms that the derived mathematical models of linear systems subjected to linearization are correct.
6 Conclusion
The use of geometrical methods for nonlinear mathematical models makes it possible to obtain simple models of linearized systems. Thanks to that we can analyse linearized models using methods known from the theory of linear systems and then transfer the results to a nonlinear system (1) by means of inverse transformation S−1(z). The transformation of nonlinear description into linear one by linearization (ensuring local balance of the system dynamics) is very useful in solving practical problems relating to the behaviour of nonlinear objects. It not only allows a simpler analysis of such systems but also makes it possible to avoid problems associated with the nonlinearity of the system.
Furthermore, it is worth noting that the numbers r1+ ··· + rp are called the characteristic numbers and each characteristic number ri is associated with jth output of hi system and tells us how many times yi must be differentiated to receive power supply ui explicitly. If a relative degree of the system \( r < n \) then such n – r of \( S_{r + 1} ({\mathbf{x}}),\; \ldots \;,\;S_{n} ({\mathbf{x}}) \) coordinates must be defined that the Jacobian of the mapping (16) is of full rank at xo point. Then, making an additional assumption that \( L_{{\mathbf{g}}} S_{i} ({\mathbf{x}}) = 0 \) we obtain additional equation of the system dynamics \( \dot{z}_{i} = L_{{\mathbf{f}}}^{{}} S_{i} (x(t)) \).
Nonlinear system of multiple inputs and multiple outputs can be decomposed by a static feedback only if E(x) matrix is non-singular. Non-singularity of the matrix is thus a necessary condition for a solution to the problem. However, when choosing different output functions of the considered system, it is a frequent case that when we look for a regular feedback, a decoupling matrix is singular. In this case, dynamic feedback [12,13,14] is used to solve the problem.
References
Gear W (1971) Numerical initial value problems in ordinary differential equations. Prentice Hall Inc., Upper Saddle River
Butcher JC (2003) Numerical methods for ordinary differential equations. Wiley, Hoboken
Najm FN (2010) Circuit simulation. Wiley, Hoboken
Brockett RW (1976) Nonlinear systems and differential geometry. Proc IEEE 64(1):61–71
Brockett RW (1978) Feedback invariants for nonlinear systems. In: Proceedings of the 6th IFAC world congress, Helsinki, Finland, vol 6, pp 1115–1120
Jakubczyk B, Respondek W (1980) On linearization of control systems. Bull Acad Pol Sci Ser Sci Math 28:517–522
Byrnes CI, Isidori A (1988) Local stabilization of minimum phase nonlinear systems. Syst Control Lett 11:9–19
Celikovsky S, Nijmeijer H (1996) Equivalence of nonlinear systems to triangular form: the singular case. Syst Control Lett 27:135–144
Jakubczyk B, Respondek W (1980) On linearization of control systems. Bull Acad Pol Sci Ser Sci Math 28:517–522
Isidori A, Krener A, Gori AJ, Monaco S (1981) Nonlinear decoupling via feedback: a differential geometric approach. IEEE Trans Automat Contr 26:331–345
Tall IA, Respondek W (2008) Feedback linearizable strict feedforward systems. In: Proceedings of the 47th IEEE conference on decision and control, Cancún, Mexico, pp 2499–2504
Isidori A (1989) Nonlinear control systems: an introduction. Springer, Berlin
Isidori A (1995) Nonlinear control systems. Springer, Berlin
Nijmeijer H, van der Schaft A (1991) Nonlinear dynamical control systems. Springer, New York
Bodson M, Chiassons J (1998) Differential-geometric methods for control of electric motors. Int J Circuit Theory Appl 8:923–954
Su R (1982) On the linear equivalents of nonlinear systems. Syst Control Lett 2:48–52
Hunt LR, Su R, Meyer G (1983) Global transformations of nonlinear systems. IEEE Trans Automat Contr 28:24–31
Fujimoto K, Sugie T (2001) Freedom in coordinate transformation for exact linearization and its application to transient behavior improvement. Automatica 37:137–144
Guay M (2005) Observer linearization of nonlinear systems by generalized transformations. Asian J Control 7(2):187–196
Jordan A, Nowacki JP (2004) Global linearization of non-linear state equations. Int J Appl Electromagn Mech 19:637–642
Devanathan R (2001) Linearization condition through state feedback. IEEE Trans Automat Contr 46(8):1257–1260
Boukas TK, Habetler TG (2004) High-performance induction motor speed control using exact feedback linearization with state and state derivative feedback. IEEE Trans Power Electron 19(4):1022–1028
Deutscher J, Schmid C (2006) A state space embedding approach to approximate feedback linearization of single input nonlinear control systems. Int J Circuit Theory Appl 16:421–440
Wang D, Vidyasagar M (1991) Control of a class of manipulators with the last link flexible—part I: feedback linearization. ASME J Dyn Syst Meas Control 113(4):655–661
Liu KP, You W, Li YC (2003) Combining a feedback linearization approach with input shaping for flexible manipulator control. Int Conf Mach Learn Cybern 1:561–565
Jordan A, Kaczorek T, Myszkowski P (2007) Linearization of nonlinear differential equations. Bialystok University of Technology, Bialystok (in Polish)
Jordan AJ (2006) Linearization of non-linear state equation. Bull Pol Acad Sci Tech Sci 54(1):63–73
Elwakil A, Kennedy M (2001) Construction of classes of circuit-independent chaotic oscillators using passive-only nonlinear devices. IEEE Trans Circuits Syst I 48(3):289–307
Zawadzki A, Różowicz S (2015) Application of input—state of the system transformation for linearization of some nonlinear generators. Int J Control Autom Syst 13(3):1–8
Zawadzki A (2014) Application of local coordinates rectification in linearization of selected parameters of dynamic nonlinear systems. COMPEL Int J Comput Math Electr Electron Eng 33(5):1819–1830
Jeon SH, Choi JY (2000) Adaptive feedback linearization control based on stator fluxes model for induction motors. In: Proceeding of the 15th international symposium on intelligent control (ISIC 2000), July 2000, pp 273–278
Ouyang H, Wang J, Huang L (2003) Robust output feedback stabilization for uncertain systems. IEE Proc Control Theory Appl 150(5):477–482
Singh SN et al (2000) Adaptive feedback linearizing nonlinear close formation control of UAVs. In: Proceeding of the American control conference, June 2000, pp 854–858
Bourbaki N (2002) Lie groups and Lie algebras, Chapters 1–3. Springer, Berlin. (1998) Lie groups and Lie algebras, Chapters 4–6, Springer, Berlin
Bump D (2004) Lie groups, graduate texts in mathematics, vol 225. Springer, New York
Serre JP (2001) Complex semisimple Lie algebras. Springer, Berlin
Author information
Authors and Affiliations
Corresponding authors
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Różowicz, S., Zawadzki, A. The use of differential geometry methods for linearization of nonlinear electrical circuits with multiple inputs and multiple outputs (MIMOs). Electr Eng 100, 2815–2824 (2018). https://doi.org/10.1007/s00202-018-0746-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00202-018-0746-0