
Abstract
Motivated by the dynamic injection environment posed by unsteady pressure gain combustion processes, an experimental apparatus was developed to visualize the dynamic response of a transparent liquid injector subjected to a single steep-fronted transverse pressure wave. Experiments were conducted at atmospheric pressure with a variety of acrylic injector passage designs using water as the working fluid. High-speed visual observations were made of the injector exit near field, and the extent of backflow and the time to refill the orifice passage were characterized over a range of injection pressures. A companion transient one-dimensional model was developed for interpretation of the results and to elucidate the trends with regard to the strength of the transverse pressure wave. Results from the model were compared with the experimental observations.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Pressure gain combustion (PGC) research has been rapidly gaining attention as a potential means to produce thrust or generate power at higher efficiency than conventional constant-pressure combustion technology [1, 2]. These transient devices rely on the detonative mode of combustion as opposed to deflagration at constant pressure, as is common in current rocket or air-breathing engines. For example, the rotating detonation engine (RDE) is currently receiving substantial attention as a candidate for future applications and serves as a major motivation for the present study. Under ideal operation, the annular RDE combustion chamber contains one or more azimuthally traveling detonation waves traversing the annulus at velocities approaching the Chapman–Jouguet (CJ) value, while regions downstream of the wave passage supply fresh propellants to support the perpetuation of the next incoming wave. Because detonation waves can travel at speeds well over 1000 m/s, injectors in these devices are subject to dynamic downstream pressures oscillating at kilohertz frequencies. Theoretically, detonation waves can produce pressure ratios in excess of 30 depending on reactant mixtures, and these strong waves create pressures that exceed the injection pressure such that backflow of propellants is a distinct possibility. Understanding the transient response of the injector under these conditions is crucial since reverse flow of the entire injector passage would bring combustion products into the manifold with potentially disastrous consequences. The transient injection flow recovery subsequent to wave passage must also be understood in order to assess injection and filling characteristics that prepare the combustible mixture for the next arrival of a detonation wave [3].

P&ID of the pre-detonator
Unfortunately, only limited prior work has focused on injector response to violent events such as the passage of a detonation wave. Moreover, most prior research was motivated by injector response during combustion instabilities in constant-pressure combustion engines, not detonation engines. Nevertheless, the classic work dates back to the 1950s with Miesse [4] and Reba and Brosilow [5] whose efforts are also covered in some detail in the NASA Special Publications (SP Series) from the 1970s [6, 7]. The Reba and Brosilow linear analysis describes amplitude and phase shift of a plain-orifice atomizer to an imposed pressure oscillation of arbitrary frequency. The relevant frequency here (injection frequency) is the rate at which fluid in the passage is replaced, i.e., v / L. These classical studies show that the injection response to a small amplitude sinusoidal pressure perturbation tends to roll off to low amplitudes when frequencies are, say, an order of magnitude higher than that of the injection frequency.
MacDonald et al. [8] extended the Reba and Brosilow analysis to consider nonlinear pressure perturbations using an axisymmetric CFD approach. Their results show that the nonlinear response is less than the linear result except at frequencies in excess of 5 v / L. These authors also included the effect of the vena contracta pulsations that are attributed to hydrodynamic instability of this reentrant region near a sharp orifice inlet. Simple models have also been used to assess the influence of injector unsteadiness on the jet development outside of the orifice exit [9, 10]. While this work helped to establish nonlinear effects of a finite amplitude sinusoidal pressure disturbance, it does not address the nature of steep-fronted waveforms consistent with passing detonation events.
In the more recent era, substantial efforts have been devoted to understanding the response of specific injector types including swirl injectors [11,12,13,14], shear coaxial injectors [15, 16], and swirl coaxial injectors currently of interest for oxidizer-rich staged combustion cycles [17, 18]. Brady also recently published a peripherally related study regarding line priming [19]. The RDE community has recently begun to produce fully coupled simulations in which dynamic injection is directly coupled to the detonation passage [20, 21]. Results to date show that the very presence of injector and plenum dynamics will cause the detonation wave structures to be different from that obtained with ideal injectors. Unfortunately, past efforts [20,21,22,23] have all focused on injection of gaseous propellants; the challenges of two-phase and liquid injection schemes remain to be addressed.
As there are currently no available studies of the response of liquid injectors to violent events such as a passing detonation, we began by exploring the range of conditions over which dynamic behavior was observed in the channel when exposed to a detonation event that was initiated at atmospheric conditions. At atmospheric initial pressure, dynamic backflow was observed at low/modest injection manifold pressures—typically about 0.07–0.2 atm gauge pressures. Because the differential pressure created by a detonation event scales linearly with the ambient pressure, we would expect larger injector pressure drops to display the dynamic behavior uncovered at the ambient pressure detonation conditions explored in this introductory work.
2 Experimental facility
To meet the objectives of the study, a cold-flow experiment was designed to represent a single injector element of an RDE. An oxygen/hydrogen “pre-detonator” (henceforth referred to as “predet”) was developed to drive a detonation through an optically accessible test section, and a high-speed camera recorded the response of the liquid—water in this case—as the detonation wave passes. Figure 1 provides a schematic arrangement of the plumbing and instrumentation diagram (P&ID) for the device. We are indebted to the Detonation Engine Research Facility at AFRL for donating a functional predet that creates the desired DDT event [24]. Major elements in the P&ID include two fast-response solenoid valves (LeeCo models IEPA2411241H and IEPA2 411141H), a mixing and ignition chamber, and a deflagration-to-detonation transition (DDT) tube. Ignition was achieved using a remote-control automotive spark plug (NGK model ME 8). The DDT tube was a 6.4-mm (0.25 in.) stainless steel tube approximately 88 mm (3.5 in.) in length, with an inner diameter of 4.6 mm (0.18 in.). Its upstream end was tapped internally with 10–32 threads to a depth of approximately 25 mm (1 in.). Feed pressures for both hydrogen and oxygen were set to 1.38 MPa (200 psia). Due to the small size of the propellant feed lines (1.6 mm or 1/16 in. tubing), we did not possess the instruments capable of measuring the flow rates of each propellant. However, we approximated the equivalence ratio of the mixture to be two based on choked flow calculations.

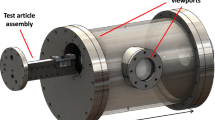
Drawing of the test article (rotated \(90^{\circ }\) counterclockwise) showing major features. The hot gas path has a rectangular cross section of 4.6 mm by 13.7 mm (0.18 in. by 0.54 in.) in the injector module block
The predet was interfaced with the end of an expanding acrylic channel on the test article. The test article also included a modular injector insert and pressure instrumentation as highlighted in Fig. 2. The transition channel section was included to diffuse the detonation to the cross-sectional area required for the injector module, and a low-expansion half-angle of \(5^\circ \) was employed to avert any potential flow separation; design details are included in [25]. Visual observations of wave structures in the near-orifice-exit region confirmed that the design was sufficient to maintain a planar wave at the test article. The transition section was used for all injector configurations studied, while the injector modules were replaced with the various designs for different tests. In all configurations, the predet effluent entered the transition section through a 6.4-mm (0.25 in.) compression tube fitting. A channel width of 4.6 mm (0.18 in.) was chosen to match the inner diameter of the DDT tube, and the height was machined to 13.7 mm (0.54 in.) such that a flat rectangular profile was obtained. A high-frequency pressure transducer was located on the channel sidewall at the same axial station as the injection site.
We fabricated four different injector designs to assess the influence of injector length and the presence of an upstream plenum (countersink) on the overall response. Dimensions of each injector are provided in Table 1, and schematics of each of the four designs, designated long, medium, short, and plenum (L, M, S, and P, respectively), to represent their key features are shown in Fig. 3. All injector designs featured a \(90^\circ \) conical transition between the plenum and injector passage to guide the flow. Based on earlier tests with a different design, a water outlet port was added directly across from the injector exit to prevent the accumulation of water within the detonation passage since this could lead to inconsistent pressure conditions during the experiment.
The steady-flow discharge coefficients of the injectors were also determined using the catch-and-weigh method. In the range of manifold pressures tested, all injectors had discharge coefficients consistent with the developing flow regime such that their values were strongly dependent on the imposed pressure drop. The non-constant discharge coefficients were a source of uncertainty as discussed in Sect. 4. A chart of the discharge coefficients plotted against injector pressure drop is shown in Fig. 4. Rather modest pressure drops were employed in the study to assess regions where injection dynamics were important. Design P shows a significantly lower discharge coefficient than the other injectors, presumably due to a second vena contracta in the narrower plenum.

Drawings of tested injector designs. From left to right: L, M, S, and P

Discharge coefficients versus injector pressure drop for injector elements used in the study

Schematic of sequence of events showing a fixed mass responding to a change in pressure differential
Injector manifold pressure was measured using a 400 kPa (60 psia) GE Druck pressure transducer located approximately 8 cm (3 in.) upstream of the injector and was manually controlled using a needle valve 25 cm (10 in.) upstream of the pressure transducer.
The predet was fed from 34.5 MPa (5000 psia) hydrogen and oxygen K-bottles, while nitrogen purge and deionized water were linked directly to the laboratory’s supply lines. A high-speed data acquisition system was used to control the predet’s solenoid valves and record the profile of the pressure wave at a sampling rate of 1 MHz. The pressure transducer used to capture the pressure signal was a Kulite XTEL-190, flush-mounted as per manufacturer specification. Its diaphragm is protected by a built-in perforated screen that increases the sensor’s rise time to approximately 20 \(\upmu \)s, causing the pressure readings to be spread horizontally (temporally). However, according to the pressure-wave shape analytical study presented in the following section, the total delivered impulse instead of the peak pressure amplitude was the main driver of injector response. Therefore, we have reason to believe that the temporal skewing of the pressure signal had little impact on our analysis to follow. We performed five tests at each test condition to quantify repeatability and measured the backflow distance and refill time of the various injectors from the high-speed camera footage. Detailed information of the test hardware and facilities can be found in [25].
3 One-dimensional numerical model development
The nature of the interaction between a transverse pressure wave and a cylindrical liquid injection is highly three-dimensional, and accurate predictions of injector response will certainly require CFD studies in three dimensions. However, it is no trivial task to simulate 3-D transient two-phase flows and parametric studies become impractical. Instead, we developed an unsteady, one-dimensional, lumped-parameter computational model to help interpret the experimental measurements and serve as a preliminary design and analysis tool. The model solves for the dynamic response of a column of liquid with density \(\rho \) and length L subjected to a highly transient downstream pressure disturbance as highlighted in Fig. 5. We consider a fixed manifold pressure, \(P_{\mathrm {m}}\), and an initial chamber pressure of \(P_1\). Additionally, x represents the column end location for the purposes of tracking its motion along the orifice passage.
While injector flow dynamics have been of interest to the combustion stability and water hammer communities for many years, we have not found an analysis comparable to this simple approach in the existing literature. By and large, the combustion stability community has assessed transient response to sinusoidal waveforms using both linear [5, 6] and nonlinear [8] models. With water hammer, finite wave speeds are employed as the applications typically stem from “long pipes.” In this case, linear and nonlinear wave equations are employed to assess dynamics [26].
As an initial step, the column of liquid was modeled as a fixed mass, and a step change in pressure from \(P_1\) to \(P_2\) was considered. The downstream pressure \(P_1\) can be set to zero without loss of generality, i.e., we measure all pressure differences with respect to this initial gauge pressure. Applying Newton’s second law to the liquid column with \(F=PA\) gives
The dynamic pressure term appearing in (1) stems from the fact that the entire column is moving prior to a disturbance in the downstream pressure. Consequently, the entire manifold stagnation pressure has to be applied in order to stagnate the fluid. The upper sign applies when the flow is moving to the right (positive x-direction), and the lower sign applies during backflow conditions. It becomes apparent from the above equation that for a plain orifice, the cross-sectional area does not play a role in the problem. During backflow, the entire column of liquid will be pushed upstream. Letting \(v_1\) represent the initial Bernoulli velocity of the flow prior to the disturbance, we have
Similarly, the Bernoulli velocity after the step change, \(v_2\), is
Here, \(v_2\) takes the positive sign when \(P_2<P_{\mathrm {m}}\). When \(P_2>P_{\mathrm {m}}\), the flow reverses and \(v_2\) takes on a negative value. Equation (1) is a nonlinear ordinary differential equation that is integrated numerically to give instantaneous v and x values using an explicit second-order accurate in time method for computing the liquid–gas interface velocity, v. A second-order backward Euler differencing scheme is utilized to solve for the velocity at the current time level i in terms of quantities at time levels \(i-{\mathrm {1}}\) and \(i-{\mathrm {2}}\). The resulting difference approximation for the velocity at the current time level is

Timestep sensitivity study showing the insensitivity of the solution to further refinements to timestep size beginning at \(t = 1 \times 10^{-8}\) s
The scheme is started using first-order methodology in a standard implementation of the backward Euler scheme. Equation (4) can be numerically integrated in time to obtain the interface location. A timestep of \(1 \times 10^{-8}\) s was shown to be sufficiently small to produce converged results (Fig. 6). Additional details of the numerical treatment can be found in [25].
The orifice transit time \(\tau \) represents a fundamental quantity in describing the dynamic response of the column:
We can also define a dimensionless pressure \(p=P_{\mathrm {m}}/P_2\) that characterizes the strength of the imposed disturbance relative to the manifold pressure. Consider the case when \(P_1=0\) at \(t<0\) and \(p=P_{\mathrm {m}}/P_2=\mathrm {constant}\) when \(t>0\). This represents a step pressure change which drives the fluid flow to a different steady state. We can define a response time \(t_{\mathrm {r}}\) as the time taken for the flow to reach 95% of the difference between \(v_1\) and \(v_2\) since an asymptotic behavior is expected as the flow approaches \(v_2\) and the driving acceleration diminishes.

Plot of dimensionless response time \(t_{\mathrm {r}}\) versus pressure ratio p. The shaded region indicates the range of typical pressure ratios in a realistic system
Figure 7 depicts the behavior of this response time over a wide range of pressure disturbance amplitudes. When \(p\gg 1\), the imposed disturbance is a small fraction of the initial manifold pressure and the response time tends to asymptote to \(t_{\mathrm {r}} \approx 3\tau \) under these conditions. For a very strong disturbance such as that imparted by a detonation wave \(p\ll 1\), the most rapid response is attained under these conditions with \(t_{\mathrm {r}}<2\tau \). When very weak disturbances are imposed (\(p\approx 1\)), the orifice takes the longest to respond since the imposed forces are the smallest under these conditions. For pressure ratios consistent with detonation waves (indicated by the shaded region in Fig. 7), the results give response times in the range \(2\tau<t_{\mathrm {r}}<5\tau \) and the injector does respond on a timescale consistent with the time fluid spends in the passage under nominal injection conditions. While instructive, these results are of limited use since detonation events are highly transient, characterized by a steep-fronted pressure spike followed by a period of pressure decay. For this reason, we consider a triangular-shaped pressure disturbance characterized by instantaneous rise to a maximum pressure \(P_2\) followed by a linear decay in pressure. This profile will be more representative of the pressure created by the passage of a detonation wave.
We can define \(\tau _{\mathrm {c}}\) as the duration of linear decay and pressure impulse as the area under the triangular-shaped disturbance (\(I=0.5\tau _{\mathrm {c}}P_2\)), where \(P_2\) is now the peak pressure. Here, we consider several \(P_2\) and \(\tau _{\mathrm {c}}\) combinations under the constraint that \(I={\mathrm {constant}}\). Keeping manifold pressure and therefore orifice transit time \(\tau \) constant, we can use \(\tau \) to non-dimensionalize \(\tau _{\mathrm {c}}\). Making \(\tau _{\mathrm {c}}/\tau =1\) and \(P_2=10P_{\mathrm {m}}\) the baseline case, the value of \(\tau _{\mathrm {c}}/\tau \) can be decreased while keeping I constant to make the pressure profile steeper; the cases considered are shown in Fig. 8.

Pressure profile of triangular pulses with constant pressure impulse

Plot of non-dimensional velocity versus non-dimensional time for various decay times and peak pressures

Plot of non-dimensional displacement versus non-dimensional time for various decay times and peak pressures
Figures 9 and 10 show velocity and position histories. Figure 9 shows varying degrees of initial deceleration since the peak pressure is now different for each of the cases. While there is a more violent velocity excursion for a high-amplitude short pulse as compared to a low-amplitude long pulse, the asymptotic behavior and overall response time vary little for the cases considered. This is a fundamental result that is important to system dynamics as the shape of the imposed overpressure is of less concern than the overall impulse applied to the system. Figure 10 reinforces this notion in terms of the location of the end of the column. Once the imposed impulse has been applied, all the cases tend to converge toward the same overall system response. The results of this study indicate that the horizontal skewing of pressure profiles due to the pressure transducer’s rise time would not result in significant error.
Figure 11 depicts the overall recovery time \(t_{\mathrm {rec}}\), defined as the time required for the injection speed to return to 95% of its original value. Results show only small variations in recovery time over the range of conditions considered. Thus, the orifice dynamic response will depend almost exclusively on the impulse generated by the wave.

Plot of non-dimensional recovery time versus non-dimensional decay time
While the fixed-mass analysis highlights some top-level characteristics of importance, we desire a more accurate representation of the system to account for additional physical phenomena. For example, as the free surface propagates into the orifice passage, the gas has less mass in the orifice passage to accelerate. We removed the fixed-mass constraint and included viscous effects to produce a variable-mass model for the injector. Flow beyond the inlet and exit of the injector was neglected by freezing x at 0 or L when it exceeded those values such that only the mass within the injector channel was used for calculations. The following diagram shows the control volume used in the calculations (Fig. 12).

Diagram showing the computational control volume bounded by the green dashed boundary
From (1), the acceleration due to the imposed pressure gradient in the axial direction is
Here, the density is the mass-weighted average of the liquid and gas present in the orifice. It is important to account for the combusted gas density here (obtained from NASA CEA [27]) so that the acceleration remains bounded when the entire injector is filled with combustion products.
In real flow, frictional loss is expected on the channel wall and is calculated using the Fanning friction factor, f, according to
where \(\mathrm{Re}=\rho vD/\mu \) is the Reynolds number. The Colebrook equation [28] for the turbulent regime requires f to be solved numerically. After f is obtained and wall shear stress is computed, the net frictional force on the domain will be
where v is the interface velocity and \(A_{\mathrm {wet}}\) is the wall area currently wetted by the fluid. Friction of gaseous combustion products is neglected. The mass of liquid in the orifice is then the product of the orifice cross section, liquid column length, and liquid density. The mass of the fluid in the injector channel is given by
The net acceleration of the liquid column is the sum of the acceleration due to pressure gradient and the deceleration due to friction:
Numerical treatment of the variable-mass model remained the same as (4), and the same timestep of \(1 \times 10^{-8}\) s produced results that were insensitive to further refinements in timestep [25]. We also used empirical pressure data in this case to provide a direct comparison between the experimental measurements and analysis predictions. Results from this comparison are included in the following section.
4 Results and discussion
Figure 13 shows a macroscopic view of events as a detonation wave travels down the channel. The wave travels from top to bottom in the right half-plane, and water flows from left to right. The water jet is shattered into a fine mist by the passage of the high-amplitude detonation front. At the same time, the column of water in the injector is pushed back toward the plenum by the sudden spike in pressure. This series of images taken at 12,000 frames per second (fps) and 304 by 512 pixels resolution serves to provide an overall picture of the events during each test run. Subsequently, we reduced the viewing window significantly to enable higher frame rates (more than 80,000 fps) and thereby capture more detail regarding the injector’s response. It should be noted that the injector shown here was from a prior experiment and was not of the same design as those used to generate the data presented in this article. However, the events occurring downstream of the injector face remain unchanged.

Macroscopic view of events during a typical test
4.1 Pressure data
Over half of the total sets of pressure data that we collected showed unexpected excursions shortly after the passage of the pressure wave, and the occurrence is believed to be the result of thermal drift of the pressure sensor. In earlier tests with a different design, the pressure sensor was situated directly across from the injector orifice and was therefore continuously covered with a film of water. In those tests, pressure excursions were not observed in the data. When water was allowed to leave the detonation passage freely, the transducer was directly exposed to the hydrogen–oxygen flame during blowdown and therefore produced an increased output voltage. For instances where thermal drift was minimal, it was likely that water droplets had come to rest directly on the transducer face due to the splashing resulting from injection recovery or passage over-relaxation (where surrounding gas gets drawn back into the detonation channel). The pressure data containing thermal drift could not be used directly as input for the numerical analysis. However, analysis of all the pressure data revealed that the detonations produced by the predet were consistent in strength and profile. Figure 14 shows 23 sets of pressure data in which thermal drift was absent or minimal. The peak height, duration, and shape of the pressure signals were largely similar.

Twenty-three pressure signals plotted on the same graph showing consistent strength and profile of detonations
From the figure, we see that the pressure ratios of the first peaks cluster around the value of three. From later tests with a modified test article, we determined that the pressure waves traveled at speeds between 1200 and 1300 m/s. The pressure ratios and wave speeds both indicate that CJ detonation had not been achieved; instead, the reaction zone was decoupled from the shock. Presently, we have reason to believe that the second peaks correspond to the pressure rise due to the decoupled reaction zone.
The next best option was to choose a set of data that was relatively unaffected by thermal drift and had peak values similar to the others, and use it as a single representative input for all computations. The justification for doing so lies in the consistent and repeatable pressure-wave measurements throughout all 95 experiments conducted for Designs L, M, S, and P [25]. The representative pressure trace chosen is shown in Fig. 15.

Representative pressure data showing minimal thermal drift
4.2 Video data
Figures 16 and 17 are sequenced still images extracted from the videos showing the three different types of response observed. Images were backlit with a 500-W halogen lamp and captured at over 80,000 fps, with a 2-\(\upmu \)s exposure. While the experiments were performed with the injectors oriented horizontally, the images shown here have been rotated \(90^\circ \) counterclockwise for formatting reasons. The detonation channel is at the top of the images, and the injector plenum is at the bottom. Injection direction is from bottom to top. The detonation wave traverses the injector face from left to right.
We classified the results of the experiments under three broad categories: complete backflow, partial backflow, and limited backflow. Complete backflow is defined by gaseous combustion products penetrating the entire length of the orifice and becoming trapped in the plenum. Partial backflow occurs when the gas–liquid interface propagates upstream into the injector passage with the gaseous phase occupying the entire cross section of the passage. Finally, limited backflow is characterized by the case where gas occupies just a fraction of the injector cross section near the exit plane. The absence of inversion of the liquid–gas interface is also a characteristic of limited backflow. Examples of each category are shown in the figures that follow.

Sequence of images showing complete backflow into the plenum of injector S at \(\Delta p = 6.9\) kPa (1 psi). Dashed lines indicate regions occupied by the gaseous phase. Camera resolution was 208 \(\times \) 56 pixels at 88,888 fps
Under very low-speed liquid injection conditions, combustion gases propagate up the injector passage all the way into the injection plenum as illustrated in Fig. 16 (i.e., a complete backflow situation). Here, we should point out that the injection pressure was very low (6.9 kPa or 1 psi), so this condition is likely not representative of high-pressure combustion conditions in a pressure gain device. Gas first enters the injector passage through the boundary layer on the upwind side of the orifice and the liquid–gas interface appears tilted toward the upwind side of the injector passage due to this effect. For the test shown, the interface moves the entire length of the injection passage in about 300 \(\upmu \)s with an average velocity of 12.7 m/s. Upon penetration into the orifice plenum, some of the gas remains trapped in the plenum due to buoyancy effects. The period between 450 and 517 \(\upmu \)s is presumably a time when there is nearly no liquid in the orifice passage except for a small annular liquid region along the wall of the orifice, evident from the visible distortion close to the exit plane. At 517 \(\upmu \)s, liquid surrounding the previously continuous column of gas pinches off the column at the orifice entrance and forms a new free surface. The process is apparent during video playback, but not easily seen in the still images. At 596 \(\upmu \)s, the free surface becomes more visible as recovery begins. Note that the liquid–gas interface is tilted toward the downwind side of the orifice passage in the last frame; presumably, the upwind side of the passage recovers first during this highly transient process.

Sequence of images showing partial backflow in injector M at \(\Delta p = 6.9\) kPa (1 psi). Camera resolution was 240 \(\times \) 56 pixels at 83,333 fps
Figure 17 depicts partial backflow that could presumably occur if a low/intermediate liquid feed pressure (soft injection system) is employed. As with the large backflow condition in Fig. 16, the liquid–gas interface is tilted toward the upwind side of the injector and the interface inverts its tilt as flow recovers and liquid pushes out the two-phase region. This interesting behavior appears consistently in the results and appears to be a fundamental multidimensional effect. Further tests performed with the test article rotated \(180^\circ \) such that the pressure wave traveled from bottom to top (not shown) displayed identical surface behavior, i.e., the surface tilts upwind during the backflow phase and downwind during recovery phase, indicating that gravity has little effect on the shape of the free surface. One can imagine the high-pressure gas first pushing into the upwind boundary layer in the orifice thereby leading to a tilted free surface. Similarly during the recovery phase, the downwind side of the orifice passage will experience higher-pressure gas conditions last and therefore might cause a delayed recovery relative to the upwind side of the passage. It is surprising that this multidimensional argument appears to hold even when the free surface is pushed a substantial distance upstream into the orifice passage. Here, the backflow duration is of the order of 400–500 \(\upmu \)s. Flow recovery appears to occur over a similar time interval.

Sequence of images showing limited backflow in injector S at \(\Delta p = 28\) kPa (4 psi). Dashed lines show the approximate edge of the ejected liquid. Camera resolution was 208 \(\times \) 56 pixels at 88,888 fps
Figure 18 shows a limited backflow situation that is perhaps most relevant to high-pressure operation and injection conditions. Here, the manifold pressure was sufficiently high to prevent the injector from checking off completely; this behavior might be characterized as a stiff injection system. The yellow dashed lines show the approximate edge of continued liquid flow from the downwind region of the orifice even while the upwind portions of the orifice were undergoing backflow. These dynamics tend to be more readily apparent in the video playback. Even though liquid flow persists at the injection plane, the flow rate is very low relative to the full-flow condition. The third image (middle) shows the injector in a state of backflow, and the fourth shows it in the process of recovery. In both of these images, the slope direction of the liquid–gas interface remained the same. In other words, the free surface tilt inversion does not tend to occur under limited backflow conditions.
4.3 Measurements from video data
We analyzed the video data to obtain backflow distance and time taken between the arrival of the detonation wave and refilling of the orifice with liquid. The backflow distance was defined to be the maximum displacement of the liquid–gas interface observed along the centerline of the injector, and refill time was defined as the time between the first observable arrival of the pressure wave and complete refilling of the injector with liquid. Under limited backflow conditions, portions of the orifice continue to flow in the positive direction (into the detonation channel) and the free surface may never cross the centerline, resulting in zero measured backflow distance. For this reason, the measurements are more qualitative, but have value for representing gross trends.

Plot of absolute backflow distance versus non-dimensional pressure drop

Plot of absolute refill time versus non-dimensional pressure drop

Schematic summarizing observed behavior in near-exit region of the orifice due to a passing strong pressure wave
Figures 19 and 20 show measured backflow distance and refill time as a function of dimensionless pressure drop \(\Delta P/P_{\mathrm {m}}\) for all injector types. Note that while the injector pressure drop is a dynamic value during tests, the \(\Delta P\) on the abscissa represents only the initial pressure drop. The interested reader may refer to [25] for the absolute manifold pressure values in each test. We conducted a total of five tests at each condition, and in general, the data show a very repeatable performance with the exception of a few outliers. In Fig. 19, all designs exhibit a nonlinear relation between backflow and pressure drop. As one might expect, the shortest injector (Design S) had the largest amount of backflow since it had the smallest amount of liquid mass in the passage to displace. Designs M and L then follow in reducing order. While Designs P and S have the same orifice length and diameter, the plenum in Design P drastically reduced the amount of backflow. This suggests that at least some of the fluid in the plenum region is interacting with the pressure wave imparted by the detonation. The plenum design may therefore provide a mechanism to tune the injector’s resistance to back-pressure disturbances, and it may be desirable to consider this design feature for PGC applications.
We introduce the term “refill time” as the length of time for the injector to backflow and completely refill with liquid. Refill time is an important parameter as it is necessary to understand when liquid arrives into the chamber to support the next detonation wave passage. Figure 20 shows how the absolute refill time varies as a function of \(\Delta P/P_{\mathrm {m}}\). For the conditions tested, the refill times are all quite long relative to that which might be acceptable in an RDE application. As the orifice pressure drop/velocity is increased, refill time can be all but eliminated. Nevertheless, we investigated the soft injection conditions to assess regions where significant backflow and refill times exist. In general, the results show a surprising lack of sensitivity to injector design at low values of \(\Delta P/P_{\mathrm {m}}\). Designs M and S have refill times that almost overlap with each other, with Design L’s data points also in close proximity. At higher \(\Delta P/P_{\mathrm {m}}\), Designs P and L have noticeably smaller refill times. The plenum appears to serve a role of isolating the impact of the dynamic response to the near-exit region.
The relative insensitivity of backflow distance and refill time to injector design seems to suggest that the injector’s response is a local phenomenon. In general, the static pressure at the injector exit is the same regardless of injector length, and the local flow processes appear to be primarily controlled by this parameter. However, the boundary layer thickness is also playing a role as it is evident that gas penetration begins in the upstream boundary layer region and can be more pronounced when the boundary layer is thicker. Figure 21 provides a schematic representation of the events based on this assertion and our observations. As a result, the injectors showed similar responses even though their lengths differed by up to a factor of two.
4.4 Comparison of predictions with measurements
We used the lumped-parameter model outlined in Sect. 3 to simulate the response of each injector type. Figure 22 provides a sample output from one of the simulations in response to the measured overpressure in Fig. 15. The lower left plot shows the acceleration on the liquid in the injector orifice caused by the pressure pulse. As expected, it has the same profile as that of the pressure signal. The velocity profile in the upper right shows how quickly the liquid–gas interface moves within the injector. Positive values indicate flow toward the detonation channel, and negative values signify backflow. The last and most important plot is the time history of the liquid–gas interface location. From this plot, the two parameters of interest are obtained: maximum backflow distance and recovery time. These are the two measurable quantities from the experiments and are therefore the bases of comparison.

Sample output of predicted injector response. Upper left: input pressure signal, lower left: net acceleration on liquid, upper right: interface velocity, lower right: interface location

Plot of non-dimensional error in backflow distance versus initial Reynolds number
We made comparisons between the lumped-parameter model and the experimental results for Designs L, M, and S. We chose to exclude design P since the 1-D model did not include provisions to consider plenum geometry and Design P deviated significantly from a plain orifice. Figure 23 shows model prediction errors for dimensionless backflow distance (as a percentage of orifice length) as a function of the injection Reynolds number computed based on the imposed pressure drop. Errors in predicted backflow in Fig. 23 are very large at low injection Reynolds numbers, and the backflow distance is vastly under-predicted by the simple model. The major issue here appears to be the non-planar nature of the free surface. Despite the small time scales, the fluid in the passage does recognize the direction the wave is traversing and the surface is tilted as such. However, the large errors occur in a domain where the injection velocity is very low, and these are not typical conditions that would be expected in a functioning RDE. The model has a more reasonable agreement at higher Reynolds number injection conditions, but the overall backflow in these cases is also much smaller.

Plot of non-dimensional error in refill time versus initial Reynolds number
The non-dimensional error in refill time comparison is shown in Fig. 24. The one-dimensional model consistently under-predicts the refill time by about a factor of 1.75–2.25 (actual refill time 75–125% larger than the prediction). Clearly, these errors indicate that the 1-D treatment does not capture the fundamental physics at work. Three potential phenomena could play a role in the disparity:
-
(i)
Multidimensional flow effects The high-speed imaging displays a surface that is far from planar. The interface tilts toward the passing wave during backflow and undulates toward a planar surface during the recovery phase. Clearly, a 1-D model cannot capture this complex multidimensional motion.
-
(ii)
Viscous effects As the injection Reynolds numbers are very low in cases that display dynamic free surface motion, boundary layers are thick and viscous forces play a large role. The dynamic surface shapes that are observed are clearly affected by this factor as the interface pushes furthest into the low-momentum fluid in the boundary layer on the upstream side of the orifice; the simple model does not properly account for these physics.
-
(iii)
Dynamic manifold response The model presumes a constant manifold pressure, whereas the manifold will also respond as the compression wave from the passing detonation travels forward into this region. Wave reflections within the manifold will create an expansion wave that will travel back downstream in an attempt to equilibrate pressures after the passage of the detonation. This wave will temporarily decelerate (or even stagnate) the interface until additional wave reflections serve to recover the initial manifold pressure prior to the violent event. For these reasons, a compressible treatment of the flow passage, with a full consideration of the manifold design, may be required to better replicate recovery time periods.
While the recovery results display longer times than we might expect with the simple model, the injection conditions where dynamic surface behavior is observed occur at very low manifold pressures, and pressure drops more consistent with operational devices display minimal recovery times from our study. Study of these physics at high ambient pressures is necessary to confirm the expected behavior, i.e., minimal recovery time for “stiffer,” high-pressure injectors. Unfortunately, orifice cavitation becomes a concern when replicating these high pressure drops with ambient back-pressure and these concerns have limited the range of injection conditions that could reasonably be studied with this initial research effort.
5 Conclusions
We studied the transient response of a liquid injector subjected to a steep-fronted transverse pressure wave by exposing a single plain-orifice injector to a weak hydrogen–oxygen detonation in a transparent structure. Water was the injected fluid, and injection differential pressures of 6.9–34.5 kPa (1–5 psi) were used in injectors that varied in length from 3.81 to 7.62 mm (0.15–0.30 in.). High-speed videos and companion high-frequency pressure measurements provided simultaneous pressure and surface shapes during fluid backflow within the injector. We also created a one-dimensional flow model to assess abilities in predicting the measured response on this basis.
Results have shown that the behavior of the liquid is far from one-dimensional. Instead, the mechanism for backflow is complex because of the boundary layer dynamics that most likely play a major role in gas penetration, especially at low injector Reynolds numbers. Specifically, the detonation wave appears to first propagate into the injector along the boundary layer on the upwind side of the orifice. Because the high-pressure gas first propagates into this region, the free surface is tilted upwind during backflow. An interesting reversal of the surface tilt is observed during flow recovery, except in cases when the overall extent of backflow is limited.
The maximum extent of backflow is strongly correlated with the injection pressure drop, and higher \(\Delta P\) injection can limit or eliminate backflow. In general, longer orifice passages tend to exhibit less backflow since a larger mass of liquid must be accelerated by the high-pressure gases. We uncovered an interesting behavior with a design that featured a small plenum behind the injection orifice. The reduced plenum diameter tended to limit backflow, and this design feature might offer a mechanism to control dynamic response in practical systems.
While the backflow results exhibited significant trends with differing injector designs, the refill time (time for the free surface to return to the orifice exit plane) did not display strong influence from injector design and all concepts that we studied had similar behavior, at least at low injection pressure drops. At higher pressure drops more realistic of actual operating conditions, refill time was shorter for the longer injection element and the design employing the narrower plenum feature. Once again, the plenum appears to offer features that might be desirable for operational devices.
The experiments carried out at atmospheric pressure indicate that while the relatively low injection pressures were unable to prevent backflow from occurring, it only took approximately 20.7 kPa (3 psi) of pressure drop to resist the pressure wave to the point where backflow was only limited. Since it is impractical to completely eliminate backflow due to the scaling of detonation pressure with initial pressure, it is a likely scenario that we would want to design injectors to operate in the limited backflow regime.
Lastly, the 1-D model shows some promise in the prediction of backflow distance at higher initial Reynolds numbers, but lacks accuracy in predicting refill time, whose prediction error did not appear to show any direct dependence on Reynolds number or injector length. Assessing the model in the higher Reynolds number/injection velocity conditions is desirable because orifice cavitation limited the range of injection velocities in this study. We desire to perform further investigations at higher-chamber-pressure conditions as it will permit the use of higher injection velocities and thinner boundary layers that will perhaps make the model more relevant.
References
Daniau, E., Falempin, F., Zhdan, S.: Pulsed and rotating detonation propulsion systems: first step toward operational engines. In: AIAA/CIRA 13th International Space Planes and Hypersonics Systems and Technologies, AIAA Paper 2005-3233 (2005). https://doi.org/10.2514/6.2005-3233
Nordeen, C.A., Schwer, D., Schauer, F., Hoke, J., Cetegen, B., Barber, T.: Thermodynamic modeling of a rotating detonation engine. In: 49th AIAA Aerospace Sciences Meeting, AIAA Paper 2011-803 (2011). https://doi.org/10.2514/6.2011-803
Bykovskii, F.A., Zhdan, S.A., Vedernikov, E.F.: Continuous spin detonations. J. Propul. Power 22(6), 1204–1216 (2006). https://doi.org/10.2514/1.17656
Miesse, C.: The effect of ambient pressure oscillations on the disintegration and dispersion of a liquid jet. Jet Propul. 25(10), 525–530 (1955). https://doi.org/10.2514/8.6813
Reba, I., Brosilow, C.: Combustion instability: liquid stream and droplet behavior. Part III: the response of liquid jets to large amplitude sonic oscillations. WADC TR 59-720, Wright Air Development Center, United States Air Force (1960)
Harrje, D., Reardon, F. (eds.): Liquid propellant rocket combustion instability, pp. 373–377. NASA SP-194 (1972)
Nurick, W.H., Gill, G.S.: Liquid rocket engine injectors. NASA SP-8089 (1976)
MacDonald, M., Canino, J., Heister, S.D.: Nonlinear response of plain-orifice injectors to nonacoustic pressure oscillations. J. Propul. Power 23(6), 1204–1213 (2007). https://doi.org/10.2514/1.31189
Rump, K.M., Heister, S.D.: Modeling the effect of unsteady chamber conditions on atomization processes. J. Propul. Power 14(4), 576–578 (1998). https://doi.org/10.2514/2.7645
Heister, S.D., Rutz, M., Hilbing, J.: Effect of acoustic perturbations on liquid jet atomization. J. Propul. Power 13(1), 82–88 (1997). https://doi.org/10.2514/2.5132
Bazarov, V.G., Lyul’ka, L.A.: Nonlinear interactions in liquid propellant rocket engine injectors. In: 34th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Joint Propulsion Conferences, AIAA Paper 1998-4039 (1998). https://doi.org/10.2514/6.1998-4039
Ismailov, M., Heister, S.: Dynamic response of rocket swirl injectors, part I: wave reflection and resonance. J. Propul. Power 27(2), 402–411 (2011). https://doi.org/10.2514/1.B34044
Ismailov, M., Heister, S.: Dynamic response of rocket swirl injectors, part II: nonlinear dynamic response. J. Propul. Power 27(2), 412–421 (2011). https://doi.org/10.2514/1.B34045
Ahn, B., Ismailov, M., Heister, S.: Experimental study swirl injector dynamic response using a hydromechanical pulsator. J. Propul. Power 28(3), 585–595 (2012). https://doi.org/10.2514/1.B34261
Kim, B.-D., Heister, S.D.: Two-phase modeling of hydrodynamic instabilities in coaxial injectors. J. Propul. Power 20(3), 468–479 (2004). https://doi.org/10.2514/1.10378
Kim, B.-D., Heister, S.D., Collicott, S.H.: Three dimensional flow simulations in the recessed region of a coaxial injector. J. Propul. Power 21(4), 728–742 (2005). https://doi.org/10.2514/1.12651
Canino, J.V., Heister, S.D., Sankaran, V., Zakharov, S.I.: Unsteady response of recessed-post coaxial injectors. In: 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, AIAA Paper 2005-4297 (2005). https://doi.org/10.2514/6.2005-4297
Tsohas, J., Heister, S.D.: Numerical simulations of liquid rocket coaxial injector hydrodynamics. J. Propul. Power 27(4), 793–810 (2011). https://doi.org/10.2514/1.47761
Brady, B.: Transient fluid flow in short-pulse operation of bipropellant thrusters. J. Propul. Power 23(2), 398–403 (2007). https://doi.org/10.2514/1.24611
Schwer, D., Kailasanath, K.: Effect of inlet on fill region and performance of rotating detonation engines. In: 47th AIAA/ASME/SAE/ASEE Joint Propulsion Conference, AIAA Paper 2011-6044 (2011). https://doi.org/10.2514/6.2011-6044
Schwer, D., Kailasanath, K.: Feedback into mixture plenums in rotating detonation engines. In: 50th AIAA Aerospace Sciences Meeting, AIAA Paper 2012-0617 (2012). https://doi.org/10.2514/6.2012-617
Driscoll, R., St. George, A., Gutmark, E.: Numerical investigation of injection within an axisymmetric rotating detonation engine. Int. J. Hydrogen Energy 41(3), 2052–2063 (2016). https://doi.org/10.1016/j.ijhydene.2015.10.055
Driscoll, R., Aghasi, P., St. George, A., Gutmark, E.: Three-dimensional, numerical investigation of reactant injection variation in a H\(_2\)/air rotating detonation engine. Int. J. Hydrogen Energy 41(9), 5162–5175 (2016). https://doi.org/10.1016/j.ijhydene.2016.01.116
Shank, J.: Development and testing of a rotating detonation engine run on hydrogen and air. MS Thesis, Graduate School of Engineering and Management, Air Force Institute of Technology, WPAFB, OH (2012)
Lim, D.: Transient response of a liquid injector to a steep-fronted transverse pressure wave. MS Thesis, School of Aeronautical and Astronautical Engineering, Purdue University, West Lafayette, IN (2015)
Wylie, E.B., Streeter, V.: Fluid Transients in Systems. Prentice Hall, Prentice (1993)
Gordon, S., McBride, B.: NASA Chemical Equilibrium with Applications. Software, NASA Glenn Research Center, Cleveland, OH (2005)
Colebrook, C.F., White, C.M.: Experiments with fluid friction in roughened pipes. Proc. R. Soc. Lond. A 161(906), 367–381 (1937). https://doi.org/10.1098/rspa.1937.0150
Acknowledgements
We gratefully acknowledge the Air Force Office of Scientific Research (Contract FA9550-14-1-0029) for supporting this research.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by J. Yang and A. Higgins.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Lim, D., Heister, S., Stechmann, D. et al. Transient response of a liquid injector to a steep-fronted transverse pressure wave. Shock Waves 28, 919–932 (2018). https://doi.org/10.1007/s00193-017-0787-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00193-017-0787-8