
Abstract
This paper focuses on the investigation of the deterministic and stochastic parts of the Doppler Orbitography and Radiopositioning Integrated by Satellite (DORIS) weekly time series aligned to the newest release of ITRF2014. A set of 90 stations was divided into three groups depending on when the data were collected at an individual station. To reliably describe the DORIS time series, we employed a mathematical model that included the long-term nonlinear signal, linear trend, seasonal oscillations and a stochastic part, all being estimated with maximum likelihood estimation. We proved that the values of the parameters delivered for DORIS data are strictly correlated with the time span of the observations. The quality of the most recent data has significantly improved. Not only did the seasonal amplitudes decrease over the years, but also, and most importantly, the noise level and its type changed significantly. Among several tested models, the power-law process may be chosen as the preferred one for most of the DORIS data. Moreover, the preferred noise model has changed through the years from an autoregressive process to pure power-law noise with few stations characterised by a positive spectral index. For the latest observations, the medians of the velocity errors were equal to 0.3, 0.3 and 0.4 mm/year, respectively, for the North, East and Up components. In the best cases, a velocity uncertainty of DORIS sites of 0.1 mm/year is achievable when the appropriate coloured noise model is taken into consideration.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
DORIS (Doppler Orbitography and Radiopositioning Integrated by Satellite) is a satellite system that has been established and maintained by the CNES (Centre National d’Études Spatiales), IGN (Institut National de l’information Géographique et forestière) and GRGS (Groupe de Recherche de Géodésie Spatiale). SPOT 2 was a remote sensing satellite launched in 1990 and the first scientific satellite equipped with a DORIS payload, while the Sentinel3-A altimetry satellite is the latest mission, launched in February 2016. Beyond the determination of the orbits, earth rotation parameters (ERP) and the actual state of the ionosphere, DORIS’s observations are used to determine the position of ground stations and their velocity in the framework of the International DORIS Service (IDS) (Tavernier et al. 2005). The position is sampled every seven days and may be used for geodynamical studies (Crétaux et al. 1998; Soudarin et al. 1999; Moreaux et al. 2016b). A proper determination of the long-term trend, which may be due to post-glacial rebound, or geophysical or anthropogenic origin, has to be accompanied by the determination of the seasonalities (Blewitt and Lavallée 2002; Bos et al. 2010) and accompanied by a noise analysis to provide the optimal assessment of the trend uncertainty (Williams 2003). The DORIS system also contributes to the realisation of the ITRF (International Terrestrial Reference Frame) together with three other space geodetic techniques: global navigation satellite system (GNSS), satellite laser ranging (SLR) and very long baseline interferometry (VLBI).
Among the latest estimations on DORIS velocities, Moreaux et al. (2016b) determined the horizontal and vertical velocities from the IDS contribution to ITRF2014 and compared them to two global plate models with an a priori correction for global isostatic adjustment (GIA). They also assessed the errors of the velocity estimates, but assuming only a pure white noise. They found that the majority of horizontal and vertical velocity uncertainties are lower than 0.5 mm/year, with some of them reaching even 4 mm/year. If we assume that a combination of coloured and white noise characterises the stochastic part of the DORIS time series, those uncertainties will increase by several times (Williams et al. 2004).
The time series produced via processing of observations derived from space techniques always contain seasonal signatures (Collilieux et al. 2007). The amplitudes of seasonal signals in the DORIS data have already been described by Le Bail (2006), Williams and Willis (2006) and Khelifa et al. (2013). Le Bail (2006) found amplitudes of the annual signal of 4.1, 4.4 and 6.4 mm for, respectively, the North, East and Up components. Williams and Willis (2006) stated that the amplitudes of the annual term were estimated to be at the level of 6.3, 4.0 and 6.7 mm for, respectively, the North, East and Up components. The difference in the above-estimated amplitudes may originate from an improvement in the consecutive solutions and, also, from the number of observations and satellites. Also, a difference in the frequencies estimated within the model and the outlier removal strategy, as well as the statistical method used are what might have influenced these results (Bogusz and Klos 2016). Angermann et al. (2010) compared the DORIS contributions to the ITRF2008 and ITRF2005. They stated that the IDS submission to ITRF2008 benefited from improved analysis strategies.
Beyond seasonal signatures, Soudarin et al. (1999) reported long-term interannual or interdecadal fluctuations in DORIS solutions, explaining them as a tilting of the antenna foundation. Also, Williams and Willis (2006) observed a long-wavelength fluctuation in the DORIS time series. Using singular spectrum analysis (SSA), Khelifa et al. (2012) showed significant nonlinear movements of several millimetres and presented them in the form of the first reconstructed components (RCs). However, no plausible explanation has been given.
Williams and Willis (2006) were the first to make an attempt to understand the nature of the noise in the DORIS weekly station coordinate time series with maximum likelihood estimation (MLE). They tested 6 noise models in 12 different combinations with temporally uncorrelated (white) and temporally correlated (coloured) noise being taken into consideration. They employed the differences in the MLE values (\(\delta \hbox { ML}\)) with respect to the null hypothesis of flicker plus variable white noise to decide which noise model was preferred for the DORIS data. Feissel-Vernier et al. (2007) used the Allan deviation to estimate that the noise in the DORIS time series was white in the horizontal, while it was close to random walk noise in the vertical direction. Having employed a wavelet analysis, Khelifa et al. (2013) stated that a combination of a low flicker noise and a dominant white noise was the preferred model for the DORIS series, whereas Le Bail (2006), employing the slopes of an Allan graph, described the stochastic part of DORIS data as being of pure white noise. The level of noise for the DORIS series is highest in the East direction (Khelifa et al. 2012) due to the fact that this direction corresponds to the normal of the DORIS satellite orbits. Le Bail (2006) showed that after correction for dominant periodicities and linear drift, the white noise is still at the 10–45 mm level. She found that the power-law noise model is preferred for all components for more than 31 of the stations she examined.
Bessissi et al. (2009) applied wavelet decomposition (WD) with a Meyer wavelet to deliver the amplitudes of seasonal signals, nonlinear long-term signals and noise level in the DORIS data. Khelifa (2016) applied wavelet decomposition and Allan variance, one by one, to deliver the parameters of deterministic and stochastic parts. Wavelet decomposition is affected by the artificial loss of power at the considered (e.g. 1 cpy) frequencies, which, in turn, results in a sudden and undesired drop in power spectral density (PSD). In other words, since it distorts spectral indices causing their shift towards white noise, wavelet decomposition is too broad to be applied prior to a noise analysis. Nevertheless, wavelet decomposition can still be employed to investigate the long-term nonlinear trend (Bogusz 2015; Khelifa 2016), but it is a type of wavelet which has to be carefully chosen. Beyond wavelet decomposition, the SSA approach has also been previously applied to the GPS (e.g. Zerbini et al. 2013; Xu and Yue 2015) and DORIS data (Khelifa et al. 2012) and followed by a noise analysis with wavelet decomposition (Khelifa et al. 2012).
This paper focuses on the analysis of the stochastic properties of the DORIS time series; however, the deterministic part of the DORIS data is also examined. We employed data collected during different time spans and show that the quality of the most recent data has significantly improved. Not only have the seasonal amplitudes decreased over the years, but also, and more importantly, the noise level and its type have significantly changed. This paper is organised as follows. Section 2 describes the data we employed. Section 3 presents the methodology, while Sect. 4 provides a description of the parameters we estimated for the deterministic part. Section 5, which is essential for this paper, addresses the spectral characteristics as well as the results of the noise analysis with MLE and secular trend uncertainties of the DORIS stations. Discussion and final conclusions are provided in Sect. 6.
2 Data
2.1 DORIS series
We used the International DORIS Service (Moreaux et al. 2016a) weekly three-dimensional station coordinate solutions of the ‘IDSwd09’ series aligned to ITRF2014 (Altamimi et al. 2016) provided as Software Independent Exchange (SINEX) format files, freely available at ftp://doris.ign.fr/pub/doris/products/. The series were transformed into a topocentric (North–East–Up) coordinate frame. The weighted root-mean-square (WRMS) of the series did not exceed 10 mm (Moreaux et al. 2016a). The solution covers a period of 1140 weeks from the beginning of 1993 until the end of 2014, using data from eleven DORIS satellites. We inspected the time series and chose 90 stations at 64 sites: 49 stations situated in the Northern Hemisphere and 41 in the Southern Hemisphere (Table 1, Fig. 1). Sixty-five stations were equipped with Starec antennas, which are expected to have better stability than Alcatel antennas (Fagard 2006). We analysed the coordinate time series with a minimum time span of 5 years. Stations EVEB in Nepal, REUB in La Réunion (France) and CHAB in New Zealand were characterised by the longest time series of 21.5, 16.0 and 15.7 years, respectively. The median length of the time series is equal to 8.4 years, which is a sufficient period to obtain statistically meaningful results (Williams and Willis 2006). At 26 of the sites, the antenna was changed 2 or 3 times between 1993 and 2014. We considered these series as separate series and analysed them individually, assuming different characters for the deterministic and stochastic parts.
During the time series pre-analysis, we identified outliers within the interquartile range (IQR) assuming that any value greater than 3 times the IQR is an outlier (Langbein and Bock 2004). Also, the offsets were determined. Their epochs were based on the information stored in the log files (http://ids-doris.org/doris-system/tracking-network/site-logs.html) and supported by the manual inspection of the series. As a result, we implemented 107 offsets. They were related to the changes in the equipment (few) and seismological events in the vicinity of the station (stations: CICB—Indonesia, DIOA—Greece, EVEB—Nepal, KIUB—Uzbekistan, MANA—Nicaragua, SANB—Chile and ARFB/AREA—Peru). The time series were characterised by a median value of gaps of 0.2% (or 2.1% at maximum), with 49 stations having complete data. Since we use MLE, which allows missing data (Bos et al. 2013a), no interpolation of gaps was performed.
The stations we employed were divided into groups depending on when the data were collected at each individual station. All results are shown for three periods of time: 1) observations from 1993 to 2003, meaning the very first observations collected by DORIS with the first generation of on-board receivers; 2) observations from 2003 to 2010, corresponding to almost the second generation of DORIS receivers with two channels, meaning all data collected in the late 2000s; and 3) the latest observations, meaning data collected up to the present using the latest models of DORIS receivers which can track up to seven beacons simultaneously. All periods of observations are given approximately, which means that data collected at all stations did not begin and end at the same time. However, these time categories are very useful to understand processes which are present in the DORIS time series. Moreover, these groups allow us to show and understand how the DORIS observations evolved through the years and that their accuracy significantly increased. Obviously, the selection of the above-mentioned periods may be regarded as subjective.
2.2 Environmental loading
To examine the potential effect of environmental loading on the DORIS series, we compared DORIS-derived amplitudes and phase shifts of seasonal signals with those estimated using environmental loading models. We employed here:
-
ERAIN: atmospheric (ERA-Interim) loading, assuming an inverse barometric (IB) ocean at 6-hourly time samples with air tides (S1 & S2) removed by adjusting a mean monthly model,
-
MERRA: continental (Modern Era-Retrospective Analysis) hydrosphere loading; and
-
ECCO2: non-tidal ocean (Estimation of the Circulation and Climate of the Ocean version 2) loading.
All values of horizontal and vertical displacements of loadings were produced at the EOST Loading Service, freely available at http://loading.u-strasbg.fr. Also, we considered the joint effect (or the so-called superposition) that all environmental loading may have on the DORIS stations and named it SUP. To be able to correct the corresponding DORIS series, the 1-h (MERRA), 6-h (ERAIN) and 24-h (ECCO2) data were averaged to weekly values.

Layout of 90 stations at 64 sites where the data were collected
3 Methodology
To reliably describe the DORIS time series, we employed a mathematical model that included the long-term nonlinear signal, linear trend, seasonal oscillations (these three produce the polynomial trend model; Bevis and Brown 2014) and a stochastic part, or the so-called noise. This model for each of the topocentric components, i.e. North, East or Up, can be written as follows:
where \(x_{0}\) is the initial value, the long-term nonlinear signal and a linear trend are put together in a sum of \(a_j t_i ^{j}\), seasonal signals have the sine and cosine terms of A and B, offsets are represented by their amplitudes of p as well as the Heaviside step function, \(\varepsilon \) means residuals which remain when the deterministic part is removed, and \(t_{i}\) stands for the difference between the time of observation and a reference epoch. It is expressed as a year fraction.
3.1 Nonlinear signals
The nonlinearities, previously described as present in DORIS data by Bessissi et al. (2009) or Khelifa (2016), were modelled with polynomials of up to fourth degree. We also tested polynomials of higher degrees and proved that their coefficients are insignificant. Each of the degrees was tested individually for 90 stations of the DORIS system. Then, the preferred one was chosen based on the Bayesian information criterion (BIC, Schwarz 1978).
3.2 Seasonal oscillations
We included seasonal signals of up to 5 overtones of the tropical year: T=365.25, 182.63, 121.75, 91.31, 73.05, 60.88 days which may reflect the real geophysical processes from the atmosphere, ocean or continental hydrosphere (van Dam and Wahr 1987; van Dam et al. 1997, 2001). We also examined the higher overtones of the tropical year, but their amplitudes were smaller than their 1-\(\sigma \) error. Based on that, we decided not to include them in the model described by Eq. (1).
Beyond arising from real geophysical processes, the annual and semi-annual oscillations present in the DORIS time series can also result from either the unmodelled atmospheric effects in satellite drag modelling (Gobinddass et al. 2009) or be a consequence of radiation pressure (Stepanek et al. 2013). We also took into consideration the oscillation of \(T=117.3\) days and its 3 overtones (\(T=58.65\), 39.1 and 29.33 days). This period is related to the revolution of the TOPEX/Poseidon, Jason-1 and Jason-2 satellites’ orbits (− 3.0679 \(^\circ /day\)). Similar results were reported for the DORIS time series by Le Bail (2006), Khelifa (2016), Bloßfeld et al. (2016) and Tornatore et al. (2016). The nodal period for the remaining satellites is nearly equal to the annual period which causes draconitic periods to tend to infinity (Bloßfeld et al. 2016). Although Williams and Willis (2006) found the oscillations of 118.4, 58.8 and 20.25 days by performing an extra iterative step in the MLE process, they stated that these frequencies can be related to a 117.3-day period, so we did not include them in our analysis.
We also included a period of 20.3 days, which potentially originates from hydrological phenomena and atmospheric loading (Williams and Willis 2006). Both Bloßfeld et al. (2016) and Tornatore et al. (2016) identified signals at a frequency of 14 days in the DORIS time series. However, the origin of such a signal can stem from the sampling interval of 7 days of the DORIS coordinate time series or from mismodelling of tidal constituents as, for example, M2 or O1. To overcome the time interval of 7 days, one should examine the DORIS earth orientation parameters (EOPs) time series as they are estimated daily. Nevertheless, this falls out of the scope of this paper.
Finally, we modelled a set of 11 periods: \(T=365.25\), 182.63, 121.75, 91.31, 73.05, 60.88, 117.3, 58.65, 39.10, 29.33, 20.30 days, assuming that they are significant and present in the DORIS data.
3.3 Stochastic part
In this study, we examined five different noise models: a pure white noise (WN), a pure power-law noise (PL), a combination of white and power-law noises (WNPL), an autoregressive process of first order (AR(1)) and a generalised Gauss–Markov model (GGM). For the above-mentioned noise models, a single-sided PSD is defined as follows.
For a power-law noise, PSD is estimated from:
where \(\kappa \) is the spectral index. It refers to 0 when noise is assumed as pure white noise, to \(-\,1\) when the noise is a pure flicker noise and to \(-\,2\) when the noise is a random walk model. \(P_{0}\) is the normalising constant.
For the AR(1) process, the PSD is defined as follows:
where \(\sigma \) is the standard deviation of white noise w, \(f_{s}\) is the sampling frequency, and \(\phi \) is the coefficient of AR(1) noise. Using this nomenclature, the AR(1) model is defined in the time domain as follows:
For the GGM model, the PSD is estimated from:
where \(d=-{\kappa }/2\).
We tested the effectiveness of each model to be applied to the stochastic part of the DORIS time series by comparing the BIC values. Based on the lowest BIC value, we decided which process should be employed to model the stochastic part for any individual DORIS station. A decision was also made separately for the North, East and Up components. With every change in the stochastic model, the C \(_{unit}\) covariance matrix of observations was recreated based on the assumed noise model, similarly to the idea demonstrated by Williams and Willis (2006):
The noise models we tested have already been used in numerous studies of position time series from space techniques (e.g. Williams and Willis 2006; Teferle et al. 2009), sea-level uncertainties (e.g. Bos et al. 2013b) or zenith wet delay time series.
3.4 Maximum likelihood estimation (MLE)
The computations were performed with the fast maximum likelihood estimation (MLE) approach which accommodates missing data (Bos et al. 2013a). It allows the simultaneous deliverance of all parameters of the deterministic part along with the noise level. The parameters being estimated at the same time with MLE prevent the bias that results from sequential and separate estimates.
4 Deterministic part
In this section, we present the results estimated with MLE for both deterministic and stochastic parts of the DORIS position time series. First, amplitudes of seasonal signals are analysed and compared with environmental loading, which are supposed to contribute to seasonal curves. Then, the long-term nonlinearities estimated with polynomials are presented. The stochastic part and different noise models are presented at the end of this section.

Amplitudes of annual oscillation (period of 365.25 days) in the North, East and Up directions. The phase is counted clockwise from North, meaning all months from January till December. The colours indicate the time that the data were collected. The errors of amplitudes were no higher than \(\pm \,0.60\, \hbox {mm}\)
4.1 Seasonal signals
Figure 2 and Table 2 present the amplitudes of annual oscillation estimated with MLE for the IDS contribution to the ITRF2014. In all three directions, North, East and Up, the greatest values of amplitudes of the annual signal were obtained for stations situated between \(30^{\circ }\hbox {N}\) and \(30^\circ \hbox {S}\). The smallest amplitudes were estimated for latitudes higher than \(60^\circ \) for both Northern and Southern Hemispheres. Looking at the individual components, the largest amplitudes were found in the East direction. Consistent results for amplitude and phase shift of the annual signal were found for the nearby stations; especially, KRAB–KRBB and BADA–BADB in the North and Up directions should be mentioned. This shows that, for some stations, the annual signal might have originated from geophysical-driven processes. A clear shift in phase was noticed for different stations operating at the same site, but classified to different groups, revealing an impact of additional satellites and an improvement in the quality of observations with time. Until the launch of SPOT-5 in the middle of 2002, the DORIS constellation included only satellites with the first generation of DORIS receivers on-board. At that time, the satellite was able to track only one beacon at a given epoch. Then, with the second generation (SPOT-2, Envisat and Jason-1), the system was able to receive two beacons simultaneously. Since Jason-2 (mid-2008), the new satellites with the third generation of DORIS receivers on-board can track up to seven beacons simultaneously. As a consequence, the number of observations per beacon increased, and also, the quality of the positioning improved, as shown by Moreaux et al. (2016a, Figs. 19–21). For the North component, the largest amplitudes of annual signal were found for station KRAB (observations in group 1): 7.20 mm, which was followed by station HEMB with an amplitude of 7.15 mm (observations in group 2). In the East direction, the greatest amplitude was noticed for station LIBA (observations in group 1): 11.33 mm, which was followed by station CACB (observations in group 1) with an amplitude of 9.74 mm. The vertical direction was characterised by the highest annual amplitude of 16.22 mm estimated for station FAIA (group 1), which was followed by an amplitude of 11.03 mm for station DIJA (group 1). However, if all stations operating in the 1990s were excluded from the analysis (group 1), the greatest amplitudes of annual oscillations of 9.59 and 7.98 mm would have been found for station ASDB (group 2) and station KRBB (group 3) in the Up direction. If we consider stations FAIB and DJIB from group 2, which correspond to stations FAIA and DIJA from group 1, the amplitude of annual sinusoid fell from 16.22 and 11.03 to 2.07 and 2.85 mm, respectively. This means that the large amplitudes noticed in the early 1990s might not have originated from real geophysical changes. Having compared the individual and median amplitudes of observations collected in different periods for North, East and Up, we noticed that the amplitudes were at least 1.5 times larger for early DORIS observations than they were in the 2000s and at present. Not only were the amplitudes of tropical signals overestimated, but also the draconitic period and its overtones decreased by up to 3 times as well as a period of 20.3 days for the East component comparing groups 1 and 2.
No clear seasonal regional pattern was found for amplitudes and phases of annual sinusoids estimated for observations before 2003. However, for the latest observations, a few regional patterns may be noticed. In the North direction, most of the stations situated in the Southern Hemisphere show a clear pattern of annual maxima falling between January and March. The amplitudes are smaller for stations situated on the islands in the Indian and Pacific Oceans. Stations around Europe have the maxima falling between May and August with amplitudes of around 1–2 mm. Also, Asian stations show similar amplitudes and phases. In the East direction, a few clusters of similar seasonal pattern may be distinguished. Stations SPJB, REZB and THUB are characterised by maxima of annual sinusoid falling in January. The phases for Asian stations fall between July and August. Also, stations AMVB, KETB and CRQB show similar annual curves with phases falling in January and amplitudes falling between 1 and 3 mm. In the vertical direction, the amplitudes and phases are much more varied than they are for the horizontal components. Although varied in amplitudes, the high-latitude stations from the Northern Hemisphere show a similar pattern of maxima falling in August/September. Curves estimated for stations BADB and KRBB are almost identical in phase and amplitude. Also, the maxima estimated for three stations situated in the Indian Ocean, CRQB, AMVB and KETB, fall in February.

Amplitudes of TOPEX/Poseidon and Jason draconitic oscillation (\(T=117.3\) days) in the North, East and Up directions. The length of the arrow in the legend denotes 3 mm in amplitude; the phase is counted clockwise from the North. The colours indicate the time the data were collected at each station. The uncertainties in the amplitudes were no higher than \(\pm 0.60\) mm
The amplitudes of the consecutive overtones of annual oscillation (\(T=365.25\) days) remain not smaller than the annual sinusoid itself (Table 2). Even the fourth overtone (\(T=73.05\) days) is almost as powerful as the annual signal for the maximum value in the East component. However, the median value decreased. The period of \(T=60.88\) days (the fifth overtone) has a maximum amplitude of 4.2 mm, 6.7 and 6.2 mm, respectively, for the North, East and Up components. Such a high amplitude of the consecutive overtones may evidence that the annual curve is not necessarily of real geophysical origin, but is a joint effect of phenomena with periods of around 1 year. The maximum, minimum and median amplitudes for periods of \(T=117.3\), 58.65, 39.1, 29.33 and 20.3 days for North, East and Up components are also juxtaposed in Table 2. These values are the greatest for the East component, followed by the Up component. The smaller amplitudes were found in the North direction. Again, all overtones of draconitic oscillation (\(T=117.3\) days) are almost as powerful as the main oscillation for the East component and half as powerful as the main oscillation for North and Up.
For the East component, the amplitude of the period of \(T=20.3\) days is as high as that for \(T=117.3\) days. Blewitt and Lavallée (2002) stated that the higher harmonics of the periodic signals always have smaller amplitudes. For the DORIS data, the second and third harmonics of the draconitic signal are much more significant than the main signal itself, especially for the East component. Also, the harmonics of the tropical year (\(T=365.25\) days) do not differ much from the annual signal. This means that they might not have fully resulted from real geophysical changes, but might have also arisen from artificial changes.
Figure 3 presents the amplitudes of draconitic oscillation. The amplitudes are much higher for the equatorial area than they are for high latitudes. They were also greater for observations collected in the 1990s than they were for the 2000s and for recent times. This can be clearly observed for all components. This can arise from either the higher noise of the data included in group 1 (i.e. leakage) or true mismodelling of TOPEX/Poseidon at the draconitic period in the orbits computed by the DORIS analysis centres (more so than on Jason-1 and Jason-2). Again, a shift in phase between stations collecting observations in different periods was noticed. Stations BADA–BADB and KRAB–KRBB are very good examples of similar behaviour of consecutive periods of observations. For both East and Up components, the amplitudes remain at the same level. Also, a shift in phase between observations collected between 1993 and 2003 and the latest observations remains similar for all examined stations. These are shifted in phase of almost a quarter and a half of the year for East and Up, respectively.
To give an overview of the origin of the oscillations, we examined the possible impact the environmental loading may have on the position time series of the DORIS stations. We estimated the correlation coefficients between each individual model and their superposition with the coordinate time series (North, East and Up components). The maximum correlation between the DORIS data and the environmental loading was found for the hydrological model (MERRA) for the latest observations (group 3). These values were equal to 47% for BADB in the North direction, 71% for YEMB in the East direction and 55% for DIOB in the Up direction. If the previous observations were considered (groups 1 and 2), the correlation between DORIS and MERRA was not so obvious. The BADA station was correlated with MERRA at the level of \(-\,9\)% for the North component, the YELA and YEMB stations were correlated with MERRA, respectively, at the level of \(-\,34\) and 30% for the East component, while the DIOA station was correlated with MERRA at the level of 19% in the Up direction. The correlations between the DORIS position time series and the ECCO oceanic model were the highest for the MSPB station: 57% for the North component, and for the BEMB station: 83 and 44%, respectively, in the East and Up directions. For the ERAIN atmospheric loading model, the highest correlations were noticed for the KRBB station: 31 and 55%, respectively, in the North and Up directions, and for the MORB station: 21% in the East direction. The previous station at the KRBB site, KRAB, was correlated with the ERAIN model at the level of 36% in the Up direction. BADA and BADB, situated close to KRBB, were correlated with the ERAIN atmospheric model at the level of 20 and 45% in the vertical direction. The hydrological and oceanic loadings contributed the most to the joint effect of loadings. The atmospheric loading contributed the most to the superposition of loading models for only a few stations. These are DJIA, DJIB, HBKB, HBMB, HEMB, JIUB, KRAB, KRBB and YELA. When environmental loading models were subtracted directly from the DORIS data, we found no significant improvement in RMS values. Moreover, for most of the stations, an increase in the RMS position values was observed when the loading models were subtracted. Also, the relative change in the amplitude of the annual oscillation is not clear (Fig. 4). This denotes that the annual signal we observe in the DORIS data is not entirely of geophysical origin. We suppose that another pattern may be observed when environmental loading models were applied at the SINEX level, as applied in the newest DTRF2014 reference frame computed by the Deutsches Geodätisches Forschungsinstitut der Technischen Universität München (DGFI-TUM), see Seitz et al. (2016). However, this analysis falls outside the scope of this paper.

A relative change in amplitude of the annual oscillation in the vertical direction when environmental loading models were removed. A positive relative change means an increase in the RMS value of the DORIS data when the environmental model was removed directly from the data
4.2 Nonlinearities
In this research, we employed polynomials up to the fourth degree to describe the long-term nonlinearity present in the DORIS data. Also, we tested higher degrees of polynomials, but the coefficients were proved to be insignificant (i.e. smaller than their \(1-\sigma \) error). The preferred degree was chosen based on the BIC. The coefficients of polynomials are the highest in the Up direction, meaning that the Up component shows the greatest nonlinearities. It has to be noted that a traditional linear trend is still employed and included in the \(a_j t_i ^{j}\) sum in our model as the first degree of polynomial, please see Eq. (1). If this long-term nonlinear part was not included in the deterministic model, it would be transferred to the stochastic part, changing its character towards more correlated flicker noise. In this way, it would overestimate the uncertainties of the parameters we determined.

Time series for station KRVB. Original data are plotted in grey, and the full deterministic model (seasonal signals plus polynomials) is plotted in red. The obvious nonlinearity may be observed. The following orders of polynomials: \(2{\mathrm{nd}}\), \(3{\mathrm{rd}}\) and \(2{\mathrm{nd}}\) were assumed in the North, East and Up components, respectively
When coloured noise model was taken into consideration (see “Noise analysis” section), a set of 22, 15 and 42 series out of 90 show significant long-term behaviour in, respectively, the North, East and Up directions, meaning that the coefficients of polynomials are significantly greater than their 1-\(\sigma \) error bars. Figure 5 presents the time series for station KRVB with the full deterministic model applied. From Fig. 5 we also see that the DORIS single solution is not of the same precision, which was also previously reported by Willis (2007).
We found that the observations collected in the 1990s were characterised by the highest coefficients. This directly denotes that these large nonlinearities were caused by a deficiency in the DORIS constellation rather than real geophysical changes. To prove that, we examined whether the long-term nonlinearities originate from real geophysical (i.e. tectonic) effects and compared the DORIS-derived coefficients of polynomials to the ones obtained from the co-located (or closely located) GPS stations. It has been previously shown that GPS has the ability to reveal nonlinear tectonic changes (e.g. Caporali et al. 2013; Erdoğan et al. 2009; Bogusz 2015 or Altamimi et al. 2016). We used the GPS position time series processed by IGS (International GNNS Service) in the network solution, which contributed to the ITRF2014 (Rebischung et al. 2016). A detailed description of the processing may be found at http://acc.igs.org/reprocess2.html. We selected a time series longer than 5 years to properly capture long-term nonlinear changes. Then, we compared the GPS and DORIS position time series. We found a few similarities between the nonlinear long-term trends estimated for both techniques. The KRVB DORIS station shown in Fig. 5 is co-located with the KOUG GPS station. The GPS station is characterised by the nonlinearity similar to the DORIS stations; however, no comment can be given on that, as both series do not overlap. In the Up direction, the following pairs of co-located stations are characterised by long-term nonlinearity: the GPS FAIV station co-located with the DORIS FAIB site, GPS station STJ2 co-located with the DORIS STJB station, GPS station YAR1 collocated with the DORIS station YASB and GPS station ROTH with the corresponding ROTA DORIS station. Based on the small number of DORIS nonlinearities confirmed by GPS, we claim that the nonlinear secular trend in the DORIS time series is probably due to the numerical artefacts of the system or because GPS and DORIS stations are quite far from each other, situated on areas with different geological characteristics.
For a few sites, the nonlinearities change between different groups of observations. There are two possible reasons for that. The first is the increase in the number of satellites in the DORIS constellation. Another is the improvement in the monumentation, which might have changed, depending on the station.
After we subtracted the deterministic model, we obtained the median root-mean-squares (RMS) of residuals of 9.5, 12.3 and 10.8 mm for the North, East and Up components, respectively.
5 Noise analysis
Up until now, the WD, Allan variance or MLE methods were employed to deliver the level of noise in the DORIS data. The WD and Allan variance were applied to residuals when the deterministic model was removed. In this study, we modelled the deterministic model presented before along with different noise models to deliver the preferred stochastic model to be fitted into residuals (Fig. 6). We assumed that the spectrum of noise may have the form of five different noise models:
-
1.
a pure white noise (WN),
-
2.
a combination of white and power-law noise (WNPL),
-
3.
a power-law noise (PL),
-
4.
a generalised Gauss–Markov model (GGM), and
-
5.
an autoregressive process of the first order (AR(1)).
The full covariance matrix of the unknowns (including the secular trend) was reformulated to be analysed using MLE any time the noise model was changed, according to Eq. (2). Bayesian information criterion (BIC) was used to decide on the preferred noise model.

PSD for residuals of the RIDA station. (Polynomial trend and oscillations were subtracted.) North, East and Up components are presented, respectively, in blue, red and green. Spectral indices describing the power-law noise model are placed in the chart with the line representing the graphical interpretation of this noise model

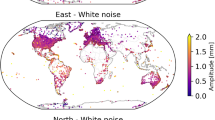
Standard deviation of driving noise in the East direction in relation to the latitude with a polynomial of second degree fitted illustrating spatial dependencies. Observations included in group 1 were marked by orange circles. Also, stations possibly affected by the South Atlantic Anomaly (SAA) were marked by red squares
We showed that the level of noise, i.e. noise amplitudes, was greater for observations collected in the 1990s (group 1) than it was for the latest data (group 3) (Fig. 7, Table 3). For the North component, the median standard deviation (STD) of driving noise, meaning a dominant noise, changed from 13.6 to 6.3 mm when different groups of observations (groups 1, 2 and 3) were considered. For the Up component, a median STD was equal to 18.1 mm for observations recorded in the 1990s. Observations collected in the 2000s are characterised by a median STD of noise of 9.9 mm, while the latest data STD of noise are equal to 7.2 mm. The East component, described before as the one estimated to be the worst (Khelifa et al. 2012), is characterised by a median STDs of noise of 23.3, 11.9 and 9.8 mm for the first, second and third groups, respectively. The medians of the STDs of noise are the highest in the East direction, probably due to the high inclination of satellite orbits (Le Bail 2006). Also, for a few stations, in the East direction, individual STDs of noise are strictly outlying from the others, as, for example, AREA with an STD equal to 44.1 mm, CACB with an STD equal to 45.7 mm and WALA with an STD equal to 33.2 mm. Station Arequipa was also found by Moreaux et al. (2016b) to outlie from others in terms of its horizontal velocity value. The authors emphasised that this may arise from a period of time with no beacon longer than 3 years. We also examined the impact that the South Atlantic Anomaly (SAA; Willis et al. 2016; Belli et al. 2016) may have on the increase in equatorial noise in the DORIS data (Fig. 7). We have to bear in mind that, so far, over the ITRF2014 time span (1993.0-2015.0), the SAA effect was identified for the Jason-1, Jason-2 and SPOT-5 satellites. We examined the following stations situated in the equatorial area: AFRB, ASDB, CADB, HEMB, KRVB and LICB. All of these stations may be affected by SSA, as their observations were collected after November 2004. For previous observations, SPOT-5 was insensitive to the SAA and Jason-1 was not included in the DORIS station coordinate estimations we employed. No possible impact of SAA on STD of noise was found in this research. Note that the Jason-1 and SPOT-5 data used for the ITRF2014 processing took the benefit of two SAA corrective models. Moreover, the SAA sensitivity of the three DORIS satellites is not at the same order.
An incredible improvement in the noise level can be observed when individual sites with few consecutive stations are analysed. As an example, stations YELA, YELB and YEMB, all operating at the same site in Canada, can be cited. These observations included the first, second and third groups. The STDs of noise in the vertical direction were equal to 13.9, 7.5 and 5.4 mm for the first, second and third groups, respectively. Similarly, the horizontal components were characterised by a decrease in STDs from 11.2 to 4.2 mm for the North and from 16.6 to 5.8 mm for the East component when different time spans of observations were considered. Other stations operating at one site show a comparable decrease in the noise level as the time span of observations is closer to 2010–2014.

Preferred noise models estimated separately for each individual station. The colours indicate the time when observations were collected and divide a set of 90 stations into the three main groups which we describe in this paper
We used a BIC to decide on the preferred noise model individually for each station and each component (Fig. 8, Table 4). In the North direction, a WN model was preferred for only 1 station. For 72 stations out of 90, the PL noise model was chosen. The GGM model was preferred for none of the stations, while a set of 8 stations followed the AR(1) noise process. Nine stations were qualified as the WNPL noise model. In the East direction, a set of 60 stations out of 90 were chosen to follow the PL noise model. For 22 stations, the AR(1) was chosen as the preferred model. Only one station followed the GGM model, and seven, the WNPL noise model. No station was classified as the WN model. In the vertical direction, 64 stations were classified to fit the PL noise model, while a set of 15 stations followed the AR(1) process. Ten stations were selected to be characterised as the WNPL noise model, one station as the WN model, and none as the GGM noise model. On the basis of all of this, we might conclude that the PL process can be chosen as the preferred one for DORIS data, as most of the geophysical processes follow the power-law noise model (Agnew 1992). Having chosen the PL noise model, we estimated the spectral indices to deliver the medians that the stochastic part of the DORIS data might be described by. These are equal to \(-\,0.27\), \(-\,0.21\) and \(-\,0.27\) for the North, East and Up, respectively. This means that the PL noise model is quite close to the white one. Figure 6 presents the power spectral densities of the RIDA station with the PL model fitted to the spectra which was found to be preferred for this station.
Unlike Williams and Willis (2006), but similarly to Le Bail (2006), we found a spatial pattern for STDs of noise, but only in the East direction (Fig. 7) with a maximum occurring for stations located in the equatorial areas due to the increased cross-track ground sampling. Spatial patterns were also found for the preferred noise model estimated separately for each individual station (Fig. 8), especially when the preferred noise models are considered to correspond to the time that the data were collected over. For the North component, few stations followed the AR(1) noise models for the data collected in the 1990s. Then, the noise models started to switch from AR(1) into PL noise. Finally, the majority of sites followed the PL model for the latest observations. For the East component, the majority of previous observations followed the AR(1) noise model, while now most of them have switched into the PL model. In the vertical direction, the majority of the latest observations were characterised by the PL noise model. For only three stations, for the latest observations, the AR(1) process was chosen as the preferred noise model.
If we consider the data collected at the same site, but from different stations, for which the PL noise is the preferred noise model, we observe an obvious increase in spectral indices from negative values to white noise and a huge decrease in the amplitudes of PL noise. Stations KRAB–KRBB and BADA–BADB constitute a representative sample of this phenomenon. For these stations, for both the older and the newest observations, the PL noise model was chosen. Stations BADA–BADB differ in the North direction of 0.5 in the spectral index and of \(11 \hbox { mm}/\hbox {yr}^{-\kappa /4}\) in the amplitude of PL noise. In the Up direction, the difference in the spectral index is equal to 0.6 and in the amplitude to \(20 \hbox { mm}/\hbox {yr}^{-\kappa /4}\). Similar results were obtained for KRAB and KRBB, meaning that there is strong evidence that the DORIS observations became much less noisy than they were at the beginning.
We also examined the impact that the type of DORIS monumentation may have on the noise level. Table S1 in Supplementary Materials shows statistics related to the 90 DORIS stations based on the type of monumentation, stability assessed from 1 to 10, preferred noise model and STD of driving noise (mm). The monumentation type and stability index were adopted directly from Saunier (2016). For some stations, no monumentation is given as the exact monumentation type will be assessed by IGN in early 2018 (personal communication with IGN on 25 September 2017). Looking at the table, we noticed a relation between the ‘stability’ coefficient and the standard deviation of noise. The higher the ‘stability’ coefficient is, the lower the standard deviation of noise is, meaning less noisier series. However, deep research on this topic is indispensable to come to the right conclusions based on all stability types for DORIS sites.
6 Velocities and ratio of velocity error
Table 4 presents the velocities along with their uncertainties estimated for the 90 stations that we studied. Both velocities and their errors differ when different groups of observations are considered. A difference in velocity may arise from the fact that the deterministic model changed through the years (from group 1 through 3). Also, the nonlinear part and seasonal signals varied between different groups. A difference in velocity error depends mainly on the noise model which was chosen as the preferred one for each considered station. Also, beyond the noise model, the STD of noise is what plays a significant role in estimated velocity error.

Uncertainties of velocities delivered for DORIS stations with coloured noise being taken into consideration. From the top: North, East and Up components
We estimated the velocity uncertainty individually for each station based on the preferred noise model determined for the observations. The median uncertainties estimated for the first group of data were equal to 0.4, 0.7 and 0.8 mm/year for the North, East and Up components, respectively. For the observations in the 2000s, the median uncertainties were equal to 0.5, 0.5 and 0.4 mm/year in the North, East and Up directions, respectively. For the latest observations, the medians we delivered were equal to 0.3, 0.3 and 0.4 mm/year. For almost all stations, the uncertainties significantly decreased for the latest observations compared to the previous ones. The only exception is the Up component for YELA, YELB and YEMB stations. For this site, due to the change in the preferred model, the uncertainty of velocity significantly increased from 0.3 mm/year delivered for AR(1) model in the 1990s, through 0.5 mm/year delivered for the PL model in the 2000s to 1.3 mm/year delivered for the latest observations for the PL model. Figure 9 presents the uncertainties of velocities separately for each component and each group. From this figure we can conclude that, by omitting some outliers, it is possible to determine velocity from DORIS-derived time series with a reliability slightly above 1 mm and in the best cases even 0.5 mm/year while taking the preferred noise model into consideration. Again, the lowest uncertainties were obtained for the third group of observations. For the East component, station SODB was found as an outlier. For this station, the WNPL model was found to be preferred. However, the spectral index of the noise was estimated to be almost equal to flicker noise (a spectral index of \(-\,1\)). In the vertical direction, two stations—CADB and BETB—were found to outlie from others. Both are characterised by PL noise with the spectral index close to flicker noise.
Following Blewitt and Lavallée (2002) and Bos et al. (2010), we estimated a ratio of velocity uncertainties delivered for the preferred noise model (PREF) and assuming a pure white noise (WN) in residuals:
Due to the approach we applied to model seasonal signals and nonlinearities, which differed from the one employed within ITRF2014 and IDS, we took our own estimates with the white-noise-only model instead of those officially released. Figure 10 presents ratios estimated for all stations in all three directions. Following the uncertainties of velocities, which decreased over the time the data were collected, the values of ratios were also lower for the latest observations, compared to the previous ones. In general, all ratios of uncertainties are greater than 1, reaching 8 at maximum. However, a few ratios fell below 1, meaning that the uncertainty estimated with WN was greater than the one delivered with the preferred noise model. This is true for stations where the PL noise model with a positive spectral index is the preferred one.

Ratio of velocity uncertainty estimated for the preferred noise model delivered for each component and station individually
7 Discussion and conclusions
In the present research, we studied a set of 90 DORIS stations which operated at 64 sites. The stations were divided into three groups of observations according to the time span when the data were collected. On the basis of that we found an agreement in amplitudes of seasonal oscillation within each group of data and also the evident differences between them due to improvements in the DORIS system. The number of satellites plays an important role in the DORIS geodetic accuracy (e.g. Williams and Willis 2006); however, the long-term effort to improve the DORIS monumentation which began in the 1990s and continued to the 2000s was also very important. It was described in detail by Fagard (2006) and Saunier (2016). Beyond the monumentation type and deficiencies in the DORIS constellation, there are also other issues which may affect the accuracy of DORIS positions through an increase in the level of noise. As an example, the DORIS signals from certain orientations can be masked out by the topography or nearby structures, e.g. stations located in Everest, St-Helena, Tristan Da Cunha or Ascension may be affected. Another reason is that some stations suffer from large environmental effects. Yaya and Tourain (2010) showed that Fairbanks station has an annual signal in residuals versus elevation which is higher during the summer than during the winter.
We assumed a set of 11 periods: \(T=365.25\), 182.63, 121.75, 91.31, 73.05, 60.88, 117.3, 58.65, 39.10, 29.33, 20.30 days to be present in the DORIS data we used. We did not confirm the hypothesis posed by Williams and Willis (2006) that the period of 20.3 days may be of atmospheric or hydrological origin. The maximal reduction of 20.3 days amplitude due to the environmental loading which were employed in this study reached 4.3, 6.2 and 23.2% for North, East and Up components, respectively. For nine stations, this reduction originated mainly from the atmospheric loading model and reached values between 2 and 11%. We also did not find an agreement with Le Bail (2006) who found amplitudes of up to 19.3, 23.7, and 13.3 mm for North, East and Up components, respectively, for the 117.3-day term in the East component associated with the TOPEX/Poseidon, Jason-1 and Jason-2 draconitics. Williams and Willis (2006) assumed an oscillation of 118.4 days and found amplitudes of 4.2, 2.9 and 3.5 mm. These values differ from what we found in this research. These differences may arise from the different data that we analysed and also from the standards used to generate the series.
We modelled the nonlinearity in the form of a polynomial function of fourth degree. We found that the polynomial coefficients are most significant in the vertical direction. The coefficients of polynomials we implemented were divided into three groups. We found that the observations collected in the 1990s were characterised by highest coefficients, which means that the large nonlinearities were caused by a deficiency in the DORIS constellation at that time rather than real geophysical changes. The nonlinearities observed in the DORIS time series have the shape of polynomials. No obvious multitrends (a few trends present in series constituting the shape of letters V or W) were found. In other techniques, such as GPS, the multitrends mostly originate from post-seismic relaxation of the ground (Wang et al. 2013; King and Santamaría-Gómez 2016) or may be caused by silent earthquakes or slow-slip events (Holtkamp and Brudzinski 2010; Tanaka and Yabe 2017). In the DORIS time series, we did not find any obvious post-relaxation curve, since no close (less than 30 km) earthquake was reported in the log files. The 2010 Chile earthquake which occurred off the coast of central Chile on 27 February 2010 at 06:34 UTC (magnitude of 8.8 according to the NEIC (National Earthquake Information Centre)) was the only strong earthquake which affected the co-located DORIS-GPS station. A significant shift of 25 cm in the North and 14 cm in the East direction with consecutive post-seismic relaxation of the exponential type is clearly visible at the SANT IGS station. For the SANB IDS station, the shifts were recorded as 27 and 13 cm for the North and East components, respectively. However, those numbers cannot be directly compared to the official ITRF2014 values due to the different assumptions of the deterministic models (different seasonal signals assumed as well as a different approach to the nonlinearities applied). The 2001 earthquake in southern Peru, 23 June 2001 at 20:33 UTC (magnitude of 8.3 according to the NEIC), strongly affected Arequipa and all three geodetic techniques which are co-located at this site: GNSS, SLR and DORIS. This DORIS station was excluded from analysis in the present research, as it was strongly affected by this earthquake.
Due to the constant growth of the DORIS constellation, the position time series are characterised by a short-term scatter which varies when comparing different time spans. However, the research described in this paper was not oriented towards describing the potential ability of the DORIS system to capture long-term changes. We aimed at a proper description of the stochastic character of the DORIS data to model the linear velocity together with its most reliable error. It is in some ways a continuation of the studies presented by Moreaux et al. (2016), who estimated the velocity along with its statistics, but a pure white noise was employed. Our statistics refer to a covariance matrix of observations being described as in Eq. (2). We changed the noise model which was fitted into the residuals from pure white noise into the preferred one, being chosen from a set of four noise models: PL, WNPL, AR(1) and GGM. Williams and Willis (2006) found that a combination of flicker noise and a variable white (FN+VW) noise model is the optimal one to use for the DORIS series. Khelifa et al. (2013) stated that white noise is more frequent in all three components of the DORIS data, but this could be the result of the application of wavelets prior to the noise analysis. From our study, it arises that the PL process may be chosen as the preferred one for most of the DORIS data. Moreover, the preferred noise model has changed through the years from AR(1) to pure PL with a few stations characterised by a positive spectral index. The ADEA station is the only one which was characterised by a pure WN noise model. This was also previously found by King and Santamaría-Gómez (2016).
Similarly to Williams and Willis (2006), we found a latitude dependence of amplitudes of noise for the East component. They can be approximated using a quadratic function with the maximum towards the equator. No possible impact of SSA was noticed.
The standard deviation of the driving noise we found in our research agreed with Khelifa et al. (2012), who stated that the noise level is the highest in the East direction. This is probably due to the high orbit inclination of some DORIS satellites. However, they also concluded that the noise level they found was relatively low in the high-latitude stations due to more satellite orbits occurring within visibility of a ground station. Also, the level of noise in our research was higher for the East component than for the North and Up components with median amplitudes of 23.3, 11.9 and 9.8 mm for the first, second and third groups, respectively.
Having chosen the preferred noise model, we estimated the errors of velocities. For the latest observations, the medians of uncertainties we delivered in this research were equal to 0.3, 0.3 and 0.4 mm/year, respectively, for the North, East and Up components. Finally, we can conclude that (by omitting some outliers) it is possible to determine the velocity from the DORIS-derived time series with a reliability of c.a. 0.5 mm. Moreover, in the best cases, even 0.1 mm/year is achievable when the appropriate coloured noise model is taken into consideration.
References
Agnew DC (1992) The time-domain behaviour of power-law noises. Geophys Res Lett 19(4):333–336
Altamimi Z, Rebischung P, Métivier L, Collilieux X (2016) ITRF2014: a new release of the international terrestrial reference frame modeling nonlinear station motions. J Geophys Res Solid Earth 121(8):6109–6131. https://doi.org/10.1002/2016JB013098
Angermann D, Seitz M, Drewes H (2010) Analysis of the DORIS contributions to ITRF2008. Adv Space Res 46(12):1633–1647. https://doi.org/10.1016/j.asr.2010.07.018
Belli A, Exertier P, Samain E, Courde C, Vernotte F, Jayles C, Auriol A (2016) Temperature, radiation and aging analysis of the DORIS ultra stable oscillator by means of the time transfer by laser link experiment on Jason-2. Adv Space Res 58(12):2589–2600. https://doi.org/10.1016/j.asr.2015.11.025
Bessissi Z, Terbeche M, Ghezali B (2009) Wavelet application to the time series analysis of DORIS station coordinates. C R Geosci 341(6):446–461. https://doi.org/10.1016/j.crte.2009.03.010
Bevis M, Brown A (2014) Trajectory models and reference frames for crustal motion geodesy. J Geod 88(3):283–311. https://doi.org/10.1007/s00190-013-0685-5
Blewitt G, Lavallée D (2002) Effect of annual signals on geodetic velocity. J Geophys Res 107(B7):ETG9-1–ETG9-11. https://doi.org/10.1029/2001JB000570
Bloßfeld M, Seitz M, Angermann D, Moreaux G (2016) Quality assessment of IDS contribution to ITRF2014 performed by DGFI-TUM. Adv Space Res 58(12):2505–2519. https://doi.org/10.1016/j.asr.2015.12.016
Bogusz J (2015) Geodetic aspects of GPS permanent stations non-linearity studies. Acta Geodyn Geomater 12(4):323–333. https://doi.org/10.13168/AGG.2015.0033
Bogusz J, Klos A (2016) On the significance of periodic signals in noise analysis of GPS station coordinates time series. GPS Solut 20(4):655–664. https://doi.org/10.1007/s10291-015-0478-9
Bos M, Bastos L, Fernandes RMS (2010) The influence of seasonal signals on the estimation of the tectonic motion in short continuous GPS time-series. J Geodyn 49(3–4):205–209. https://doi.org/10.1016/j.jog.2009.10.005
Bos MS, Fernandes RMS, Williams SDP, Bastos L (2013a) Fast error analysis of continuous GNSS Observations with missing data. J Geod 87(4):351–360. https://doi.org/10.1007/s00190-012-0605-0
Bos MS, Williams SDP, Araujo IB, Bastos L (2013b) The effect of temporal correlated noise on the sea level rate and acceleration uncertainty. Geophys J Int 196(3):1423–1430. https://doi.org/10.1093/gji/ggt481
Caporali A, Neubauer F, Ostini L, Stangl G, Zuliani D (2013) Modeling surface GPS velocities in the Southern and Eastern Alps by finite dislocations at crustal depths. Tectonophys 590:136–150. https://doi.org/10.1016/j.tecto.2013.01.016
Collilieux X, Altamimi Z, Coulot D, Ray J, Sillard P (2007) Comparison of very long baseline interferometry, GPS, and satellite laser ranging height residuals from ITRF2005 using spectral and correlation methods. J Geophys Res 112(B12):403. https://doi.org/10.1029/2007JB004933
Crétaux JF, Soudarin L, Cazenave A, Bouille F (1998) Present-day tectonic plate motions and crustal deformations from the DORIS space system. J Geophys Res 103(B12):30167–30181
Erdoğan S, Şahin M, Tiryakioğlu İ, Gülal E, Telli AK (2009) GPS velocity and strain rate fields in Southwest Anatolia from repeated GPS measurements. Sensors 9(3):2017–2034. https://doi.org/10.3390/s90302017
Fagard H (2006) Twenty years of evolution for the DORIS permanent network: from its initial deployment to its renovation. J Geod 80(8):429–456. https://doi.org/10.1007/s00190-006-0084-2
Feissel-Vernier M, de Viron O, Le Bail K (2007) Stability of VLBI, SLR, DORIS and GPS positioning. Earth Planets Space 59(6):475–497
Gobinddass ML, Willis P, Sibthorpe AJ, Zelensky NP, Lemoine FG, Ries JC, Ferland R, Bar-Sever YE, de Viron O, Diament M (2009) Improving DORIS geocenter time series using an empirical rescaling of solar radiation pressure models. Adv Space Res 44(11):1279–1287. https://doi.org/10.1016/j.asr.2009.08.004
Holtkamp S, Brudzinski MR (2010) Determination of slow slip episodes and strain accumulation along the Cascadia margin. J Geophys Res 115(B4). https://doi.org/10.1029/2008JB006058
Khelifa S (2016) Noise in DORIS station position time series provided by IGN-JPL, INASAN and CNES-CLS analysis centres for the ITRF2014 realization. Adv Space Res 58(12):2572–2588. https://doi.org/10.1016/j.asr.2016.06.004
Khelifa S, Kahlouche S, Belbachir MF (2012) Signal and noise separation in time series of DORIS station coordinates using wavelet and singular spectrum analysis. C R Geosci 344(6–7):334–348. https://doi.org/10.1016/j.crte.2012.05.003
Khelifa S, Kahlouche S, Belbachir MF (2013) Analysis of position time series of GPS-DORIS co-located stations. Int J Appl Earth Obs 20:67–76. https://doi.org/10.1016/j.jag.2011.12.011
King MA, Santamaría-Gómez A (2016) Ongoing deformation of Antarctica following recent Great Earthquakes. Geophys Res Lett 43(5):1918–1927. https://doi.org/10.1002/2016GL067773
Klos A, Bogusz J, Figurski M, Kosek W (2016) Noise analysis of continuous GPS time series of selected EPN stations to investigate variations in stability of monument types. In: Springer IAG symposium series, 142, proceedings of the VIII Hotine Marussi symposium, 19–26. https://doi.org/10.1007/1345
Klos A, Gruszczynska M, Bos MS, Boy J-P, Bogusz J (2017) Estimates of vertical velocity errors for IGS ITRF2014 stations by applying the improved singular spectrum analysis method and environmental loading models. Pure Appl Geophys. https://doi.org/10.1007/s00024-017-1494-1
Langbein J, Bock Y (2004) High-rate real-time GPS network at Parkfield: Utility for detecting fault slip and seismic displacements. Geophys Res Lett 31(15). https://doi.org/10.1029/2003GL019408
Le Bail K (2006) Estimating the noise in space-geodetic positioning: the case of DORIS. J Geodesy 80:541–565
Moreaux G, Lemoine FG, Capdeville H, Kuzin S, Otten M, Stepanek P, Willis P, Ferrage P (2016a) The International DORIS Service contribution to the 2014 realization of the international terrestrial reference frame. Adv Space Res 58:2479–2504. https://doi.org/10.1016/j.asr.2015.12.021
Moreaux G, Lemoine FG, Argus DF, Santamaría-Gómez A, Willis P, Soudarin L, Gravelle M, Ferrage P (2016b) Horizontal and vertical velocities derived from the IDS contribution to ITRF2014, and comparisons with geophysical models. Geophys J Int 207(1):209–227. https://doi.org/10.1093/gji/ggw265
Rebischung P, Altamimi Z, Ray J, Garayt B (2016) The IGS contribution to ITRF2014. J Geod 90(7):611–630. https://doi.org/10.1007/s00190-016-0897-6
Tavernier G, Fagard H, Feissel-Vernier M, Lemoine F, Noll C, Ries J, Soudarin L, Willis P (2005) The international DORIS service (IDS). Adv Space Res 36(3):333–341. https://doi.org/10.1016/j.asr.2005.03.102
Saunier J (2016) Assessment of the DORIS network monumentation. Adv Space Res 58:2725–2741. https://doi.org/10.1016/j.asr.2016.02.026
Schwarz GE (1978) Estimating the dimension of a model. Ann Stat 6(2):461–464. https://doi.org/10.1214/aos/1176344136
Seitz M, Bloßfeld M, Angermann D, Schmid R, Gerstl M, Seitz F (2016) The new DGFI-TUM realization of the ITRS: DTRF2014 (data). PANGAEA. https://doi.org/10.1594/PANGAEA.864046
Soudarin L, Crétaux JF, Cazenave A (1999) Vertical crustal motions from the DORIS space-geodesy system. Geophys Res Lett 26(9):1207–1210
Stepanek P, Dousa J, Filler V (2013) SPOT-5 DORIS oscillator instability due to South Atlantic anomaly: mapping the effect and application of data corrective model. Adv Space Res 52(7):1355–1365. https://doi.org/10.1016/j.asr.2013.07.010
Tanaka Y, Yabe S (2017) Two long-term slow slip events around Tokyo Bay found by GNSS observation during 1996–2011. Earth Planets Space 69(43). https://doi.org/10.1186/s40623-017-0628-0
Teferle FN, Bingley RM, Orliac EJ, Williams SDP, Woodworth PL, McLaughlin D, Baker TF, Shennan I, Milne GA, Bradley SL, Hansen DN (2009) Crustal motions in Great Britain: evidence from continuous GPS, absolute gravity and Holocene sea level data. Geophys J Int 178:23–46. https://doi.org/10.1111/j.1365-246X.2009.04185.x
Tornatore V, Tanır Kayıkçı E, Roggero M (2016) Comparison of ITRF2014 station coordinate input time series of DORIS. VLBI and GNSS. Adv Space Res 58(12):2742–2757. https://doi.org/10.1016/j.asr.2016.07.016
van Dam T, Wahr JM (1987) Displacements of the Earth’s surface due to atmospheric loading: effects on gravity and baseline measurements. J Geophys Res: Solid Earth 92(B2):1281–1286. https://doi.org/10.1029/JB092iB02p01281
van Dam T, Wahr J, Chao Y, Leuliette E (1997) Predictions of crustal deformations and of geoid and sea-level variability caused by oceanic and atmospheric loading. Geophys J Int 129(3):507–517. https://doi.org/10.1111/j.1365-246X.1997.tb04490.x
van Dam T, Wahr J, Milly PCD, Shmakin AB, Blewitt G, Lavallée D, Larson KM (2001) Crustal displacements due to continental water loading. Geophys Res Lett 28(4):651–654. https://doi.org/10.1029/2000GL012120
Wang R, Parolai S, Ge M, Ji M, Walter TR, Zschau J (2013) The 2011 Mw 9.0 Tohoku earthquake: comparison of GPS and strong-motion data. Bull Seismol Soc Am 103:1336–1347. https://doi.org/10.1785/0120110264
Wessel P, Smith WHF, Scharroo R, Luis J, Wobbe F (2013) Generic mapping tools: improved version released. Eos Trans AGU 94(45):409–410. https://doi.org/10.1002/2013EO450001
Williams SDP (2003) The effect of coloured noise on the uncertainties of rates estimated from geodetic time series. J Geod 76:483–494. https://doi.org/10.1007/s00190-002-0283-4
Williams SDP, Bock Y, Fang P, Jamason P, Nikolaidis RM, Prawirodirdjo L, Miller M, Johnson DJ (2004) Error analysis of continuous GPS position time series. J Geophys Res 109(B3):B03412. https://doi.org/10.1029/2003JB002741
Williams SDP, Willis P (2006) Error analysis of weekly station coordinates in the DORIS network. J Geod 80:525–539. https://doi.org/10.1007/s00190-006-0056-6
Willis P (2007) Analysis of a possible future degradation of the DORIS results related to changes in the satellite constellation. Adv Space Res 39(10):1582–1588. https://doi.org/10.1016/j.asr.2006.11.018
Willis P, Fagard H, Ferrage P, Lemoine FG, Noll CE, Noomen R, Otten M, Ries JC, Rothacher M, Soudarin L, Tavernier G, Valette J-J (2010) The international DORIS service (IDS): toward maturity. Adv Space Res 45(12):1408–1420. https://doi.org/10.1016/j.asr.2009.11.018
Willis P, Heflin MB, Haines BJ, Bar-Sever YE, Bertiger WI, Mandea M (2016) Is the Jason-2 DORIS oscillator also affected by the South Atlantic Anomaly? Adv Space Res 58(12):2617–2627. https://doi.org/10.1016/j.asr.2016.09.015.s
Xu C, Yue D (2015) Monte Carlo SSA to detect time-variable seasonal oscillations from GPS-derived site position time series. Tectonophys 665:118–126. https://doi.org/10.1016/j.tecto.2015.09.029
Yaya P, Tourain C (2010) Impact of DORIS ground antennas environment on their radio signal quality. Adv Space Res 45(12):1455–1469. https://doi.org/10.1016/j.asr.2010.01.031
Zerbini S, Raicich F, Errico M, Cappello G (2013) An EOF and SVD analysis of interannual variability of GPS coordinates, environmental parameters and space gravity data. J Geodyn 67:111–124. https://doi.org/10.1016/j.jog.2012.04.006
Acknowledgements
Anna Klos and Janusz Bogusz are financed from the Faculty of Civil Engineering and Geodesy MUT statutory research funds. Guilhem Moreaux’ contribution was performed at CLS under contract with the Centre National d’Etudes Spatiales (CNES). Loading time series were downloaded from the EOST/IPGS loading service (http://loading.u-strasbg.fr). Maps and charts were plotted in the Generic Mapping Tool (Wessel et al. 2013). The time series analysis was performed in the Hector Software using the reformulated MLE (Bos et al. 2013a).
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Klos, A., Bogusz, J. & Moreaux, G. Stochastic models in the DORIS position time series: estimates for IDS contribution to ITRF2014. J Geod 92, 743–763 (2018). https://doi.org/10.1007/s00190-017-1092-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00190-017-1092-0