
Abstract
We revisit the Pseudo-Bayesian approach to the problem of estimating density matrix in quantum state tomography in this paper. Pseudo-Bayesian inference has been shown to offer a powerful paradigm for quantum tomography with attractive theoretical and empirical results. However, the computation of (Pseudo-)Bayesian estimators, due to sampling from complex and high-dimensional distribution, pose significant challenges that hamper their usages in practical settings. To overcome this problem, we present an efficient adaptive MCMC sampling method for the Pseudo-Bayesian estimator by exploring an adaptive proposal scheme together with subsampling method. We show in simulations that our approach is substantially computationally faster than the previous implementation by at least two orders of magnitude which is significant for practical quantum tomography.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Quantum state tomography is a fundamental important step in quantum information processing (Nielsen and Chuang 2000; Paris and Řeháček 2004). In general, it aims at finding the underlying density matrix which describes the given state of a physical quantum system. This task is done by utilizing the results of measurements performed on repeated state preparations (Nielsen and Chuang 2000).
Bayesian methods have been recognized as a powerful paradigm for quantum state tomography (Blume-Kohout 2010), that deal with uncertainty in meaningful and informative ways and are the most accurate approach with respect to the expected error (operational divergence) even with finite samples. Several studies have been conducted: for example, the papers Bužek et al. (1998) and Baier et al. (2007) performed numerical comparisons between Bayesian estimations with other methods on simulated data; algorithms for computing Bayesian estimators have been discussed in Kravtsov et al. (2013), Ferrie (2014), Kueng and Ferrie (2015), Schmied (2016) and Lukens et al. (2020).
Pseudo-Bayesian method for quantum tomography, introduced in Mai and Alquier (2017), proposes novel approaches for this problem with several attractive features. Importantly, a novel prior distribution for quantum density matrix is introduced based on spectral decomposition parameterization (inspired by the priors used for low-rank matrix estimation, e.g., Mai and Alquier (2015) and Cottet and Alquier (2018)). This prior can be easily used in any dimension and is found to be significantly more efficient to sample from and evaluate than the Cholesky approach in Struchalin et al. (2016), Zyczkowski et al. (2011) and Seah et al. (2015), see Lukens et al. (2020) for more details. By replacing the likelihood with a loss function between a proposed density matrix and experimental data, the paper Mai and Alquier (2017) presents two different estimators: the prob-estimator and the dens-estimator.
However, the reference Mai and Alquier (2017) proposed simply to compute approximately these two Pseudo-Bayesian estimators by naive Metropolis-Hastings (MH) algorithms which are computationally very slow for high-dimensional systems. Recently, a faster and more efficient sampling method has been proposed for the dens-estimator, see Lukens et al. (2020). However, we would like to note that the prob-estimator is shown in Mai and Alquier (2017) to reach the best known up-to-date rate of convergence (Butucea et al. 2015) while the theoretical guarantee for the dens-estimator is far less satisfactory. Moreover, it is also shown in their simulations that the prob-estimator yields better results compared to the dens-estimator.
In this paper, we present a novel efficient adaptive Metropolis-Hastings implementation for the prob-estimator. This adaptive implementation is based on considering the whole density matrix as a parameter that needs to be sampled at a time. Moreover, an adaptive proposal is explored based on the “preconditioned Crank-Nicolson” (Cotter et al. 2013) sampling procedure that can eliminate the “curse of dimensionality”, which is the case for quantum state tomography where the dimension increases exponentially. Further speeding up by using subsampling MCMC approach is also explored in our work.
Through simulations, it is shown that our implementation is computationally significantly faster than the naive MH algorithm in Mai and Alquier (2017). More specifically, for example as in a system of 6 qubits, our algorithm is around 115 times faster than the naive MH algorithm in Mai and Alquier (2017). While in term of accuracy, we show that our algorithms returns similar results with less variation.
The rest of the paper is organized as follow. In Sect. 2, we provide the necessary background and the statistical model for the problem of quantum state tomography. In Sect. 3, we recall the Pseudo-Bayesian approach and the prior distribution. Section 4 presents our novel adaptive MCMC implementation for the Pseudo-Bayesian estimator. Simulation studies are presented in Sect. 5. Conclusions are given in Sect. 6.
2 Background
2.1 The quantum state tomography problem
Hereafter, we only provide the necessary background on quantum state tomography (QST) required for the paper. We would like to remind that a very nice introduction to this problem, from a statistical perspective, can be found in Artiles et al. (2005). Here, we have opted for the notations used in reference Mai and Alquier (2017).
Mathematically speaking, a two-level quantum system of n-qubits is characterized by a \( 2^{n}\times 2^{n} \) density matrix \(\rho \) whose entries are complex, i.e. \( \rho \in {\mathbb {C}}^{2^{n}\times 2^{n} } \). For the sake of simplicity, put \(d=2^n\), so \(\rho \) is a \(d\times d\) matrix. This density matrix must be
-
Hermitian: \(\rho ^\dagger =\rho \) (i.e. self-adjoint),
-
positive semi-definite: \(\rho \succcurlyeq 0\),
-
normalized: \(\mathrm{Trace}(\rho )=1\).
In addition, physicists are especially interested in pure states and that a pure state \( \rho \) can be defined in addition by \(\mathrm{rank}(\rho )=1\). In practice, it often makes sense to assume that the rank of \(\rho \) is small (Gross et al. 2010; Gross 2011; Butucea et al. 2015).
The goal of quantum tomography is to estimate the underlying density matrix \( \rho \) using measurement outcomes of many independent and identically systems prepared in the state \( \rho \) by the same experimental devices.
For a qubit, it is a standard procedure to measure one of the three Pauli observables \(\sigma _x, \, \sigma _y, \, \sigma _z\). The outcome for each will be 1 or \( -1 \), randomly (the corresponding probability is given in (1) below). As a consequence, with a n-qubits system, there are \(3^n\) possible experimental observables. The set of all possible performed observables is
where vector \({\mathbf {a}} \) identifies the experiment. The outcome for each fixed observable setting will be a random vector \( {\mathbf {s}} = (s_1, \ldots , s_n) \in \{-1,1\}^{n} \), thus there are \( 2^n \) outcomes in total.
Denote \(R^{{\mathbf {a}}}\) a random vector that is the outcome of an experiment indexed by \({\mathbf {a}}\). From the Born’s rule (Nielsen and Chuang 2000), its probability distribution is given by
where \( P_{{\mathbf {s}}}^{{\mathbf {a}}} := P_{s_1}^{a_{1}}\otimes \dots \otimes P_{s_n}^{a_n}\) and \(P_{s_i}^{a_i}\) is the orthogonal projection associated to the eigenvalues \( s_i\in \{ \pm 1 \} \) in the diagonalization of \( \sigma _{a_i ; , a_i\in \{x,y,z\} } \) – that is \( \sigma _{a_i} = P^{a_i}_{+1} -P^{a_i}_{-1} \).
Statistically, for each experiment \( {\mathbf {a}}\in {\mathcal {E}}^n\), the experimenter repeats m times the experiment corresponding to \({\mathbf {a}}\) and thus collects m independent random copies of \(R^{\mathbf {a}}\), say \(R^{\mathbf {a}}_1,\dots ,R^{\mathbf {a}}_m\). As there are \(3^n\) possible experimental settings \( {\mathbf {a}}\), we define the quantum sample size as \( N:=m\cdot 3^n \). We will refer to \((R^{\mathbf {a}}_i)_{i\in \{1,\dots ,m\},{\mathbf {a}}\in {\mathcal {E}}^n}\) as \({\mathcal {D}}\) (for data). Therefore, quantum state tomography is aiming at estimating the density matrix \( \rho \) based on the data \({\mathcal {D}}\).
2.2 Popular estimation methods
Here, we briefly recall three classical major approaches that have been adopted to estimate \( \rho \), which are: linear inversion, maximum likelihood and Bayesian inference.
2.2.1 Linear inversion
The first and simplest method considered in quantum information processing is the ’tomographic’ method, also known as linear/direct inversion (Vogel and Risken 1989; Řeháček et al. 2010). It is actually the analogue of the least-square estimator in the quantum setting. This method relies on the fact that measurement outcome probabilities are linear functions of the density matrix.
More specifically, let us consider the empirical frequencies
It is noted that \( {\hat{p}}_{{\mathbf {a}},{\mathbf {s}}}\) is an unbiased estimator of the underlying probability \( p_{{\mathbf {a}},{\mathbf {s}}} \) in (1). Therefore, the inversion method is based on solving the linear system of equations
As mentioned above, the computation of \({\hat{\rho }}\) is quite clear and explicit formulas are classical that can be found for example in Alquier et al. (2013). While straightforward and providing unbiased estimate (Schwemmer et al. 2015), it tends to generate a non-physical density matrix as an output (Shang et al. 2014): positive semi-definiteness cannot easily be satisfied and enforced.
2.2.2 Maximum likelihood
A popular approach in QST in recent years is the maximum likelihood estimation (MLE). MLE aims at finding the density matrix which is most likely to have produced the observed data \({\mathcal {D}}\):
where \( L(\rho ;{\mathcal {D}}) \) is likelihood, the probability of observing the outcomes given state \( \rho \), as defined by some models (Hradil et al. 2004; James et al. 2001; Gonçalves et al. 2018). However, it has some critical problems, detailed in Blume-Kohout (2010), including a huge computational cost. Moreover, it is a point estimate which does not account the level of uncertainty in the result.
Furthermore, these two methods (Linear inversion and MLE) can not take advantage of a prior knowledge where a system is in a state \(\rho \) for which some additional information is available. More particularly, it is noted that physicists usually focus on so-called pure states, for which \(\mathrm{rank}(\rho )=1\).
2.2.3 Bayesian inference
Starting receiving attention in recent years, Bayesian QST had been shown as a promising method in this problem (Blume-Kohout 2010; Bužek et al. 1998; Baier et al. 2007; Lukens et al. 2020). Through Bayes’ theorem, experimental uncertainty is explicitly accounted in Bayesian estimation. More specifically, suppose a density matrix \( \rho \) is parameterized by \( \rho (x) \) for some x, Bayesian inference is carried out via the posterior distribution
where \( L(\rho (x);{\mathcal {D}}) \) is the likelihood (as in MLE) and \( \pi (x) \) is the prior distribution. Using the posterior distribution \( \pi (\rho ( x) | {\mathcal {D}} ) \), the expectation value of any function of \( \rho \) can be inferred, e.g. the Bayesian mean estimator as \( \int \rho (x) \pi (\rho ( x) | {\mathcal {D}}) dx \).
Although recognized as a powerful approach, the numerical challenge of sampling from a high-dimensional probability distribution prevents the widespread use of Bayesian methods in the physical problem.
2.2.4 Other approaches
Several other methods have also recently introduced and studied. The reference Cai et al. (2016) proposed a method based on the expansion of the density matrix \( \rho \) in the Pauli basic. Some rank-penalized approaches were studied in Guţă et al. (2012) and Alquier et al. (2013). A thresholding method is introduced in Butucea et al. (2015).
3 Pseudo-Bayesian quantum state tomography
3.1 Pseudo-Bayesian estimation
Let us consider the pseudo-posterior, studied in Mai and Alquier (2017), defined by
where \(\exp \left[ -\lambda \ell (\nu ,{\mathcal {D}}) \right] \) is the pseudo-likelihood that plays the role of the empirical evidence to give more weight to the density \(\nu \) when it fits the data well; \(\pi (\mathrm{d}\nu )\) is the prior given in Sect. 3.2; and \(\lambda >0\) is a tuning parameter that balances between evidence from the data and prior information.
Taking, with \( {\hat{p}}_{{\mathbf {a}},{\mathbf {s}}} \) given in (2),
the “prob-estimator” in Mai and Alquier (2017) is defined as the mean estimator of the pseudo-posterior:
This estimator also referred to, in statistical machine learning, as Gibbs estimator, PAC-Bayesian estimator or EWA (exponentially weighted aggregate) (Catoni 2007; Dalalyan and Tsybakov 2008).
For the sake of simplicity, we use the shortened notation \( p_\nu := [\mathrm{Tr}(\nu P_{\mathbf {s}}^ {\mathbf {a}})]_{{\mathbf {a}},{\mathbf {s}}} \) and \( {\hat{p}} := [{\hat{p}}_{{\mathbf {a}}, {\mathbf {s}}}]_{{\mathbf {a}},{\mathbf {s}}} \) then
(\( \Vert \cdot \Vert _F \) is the Frobenius norm). Clearly, we can see that this distance measures the difference between the probabilities given by a density \( \nu \) and the empirical frequencies in the sample. Here, the readers could see that the tuning parameter \( \lambda \) is used to control the difference between the empirical frequencies and the hypothetical one from the prior distribution. We remind the reader that the matrix \( [{\hat{p}}_{{\mathbf {a}}, {\mathbf {s}}}]_{{\mathbf {a}},{\mathbf {s}}} \) is of dimension \( 3^n \times 2^n \).
Remark 1
This kind of pseudo-posterior is an increasingly popular approach in Bayesian statistics and machine learning, see for example Bissiri et al. (2016), Mai (2021b), Grünwald and Van Ommen (2017), Catoni (2007), Mai (2022), Alquier et al. (2016b), Mai (2021a) and Bégin et al. (2016), for models with intractable likelihood or for misspecification models.
3.2 Prior distribution for quantum density matrix
The prior distribution employed in Mai and Alquier (2017) can be expressed as follow: the \( d\times d \) density matrix \( \rho \) can be parameterized by d non-negative real numbers \(y_i \) and d complex column vectors of length d, \(z_i \). Put \(x = \left\{ y_1, \ldots , y_d, z_1 , \ldots , z_d \right\} \), then the density matrix is
with the prior distribution for x as
where the weights are being treated as Gamma-distributed random variables \( Y_i \overset{i.i.d.}{\sim } \Gamma (\alpha ,1) \), and the vectors \( z_i \) are standard-normal complex Gaussian distributed \( Z_i \overset{i.i.d.}{\sim } {{\mathcal {C}}}{{\mathcal {N}}} (0, I_d) \).
The tuning parameter \( \alpha \) in (6) allows the user to favor low-rank or high-rank density matrices which are corresponding to pure or mixed states, respectively. More particularly, the normalized random variables \( Y_i /(\sum Y_j) \) with \( Y_i \overset{i.i.d.}{\sim } \Gamma (\alpha ,1) \) follows a Dirichlet distribution \( \mathrm{Dir} (\alpha ) \) which ensures both normalization and non-negativity. An \( \alpha <1 \) promotes sparse draws and thus purer states, while \( \alpha =1 \) returns a fully uniform prior on all physically realizable states.
Remark 2
It is noted that this parameterization satisfies all physical conditions for the density matrix, details can be found in Mai and Alquier (2017). Moreover, this parameterization have been shown to be significantly more efficient to sample from and to evaluate than the Cholesky approach in references Struchalin et al. (2016), Zyczkowski et al. (2011) and Seah et al. (2015), see Lukens et al. (2020) for details.
Remark 3
The theoretical guarantees for the “prob-estimator" in (4) are validated only for \(0< \alpha \le 1\). More specifically, the prob-estimator satisfies (up to a multiplicative logarithmic factor) that \( \Vert {\tilde{\rho }}^{prob}_{\lambda ^*} - \rho ^0 \Vert _F^2 \le c 3^n \mathrm{rank}(\rho ^0)/N \) which is the best known up-to-date rate in the problem of quantum state estimation (Butucea et al. 2015), where c is a numerical constant and \(\lambda ^* = m/2\).
4 A novel efficient adaptive MCMC implementation
Appropriately, the prob-estimator requires an evaluation of the integral (4) which is numerically challenging due to its sophisticated features and high dimensionality. A first attempt has been done in Mai and Alquier (2017) is to use a naive Metropolis-Hastings (MH) algorithm where the authors iterate between a random walk MH for \( \log (y_i)\) and an independent MH for \(z_i\). Typically, the approach is designed to obtain T samples \( x^{(1)}, \ldots , x^{(T)} \) as a consequence the integral (4) can be approximated as
However, as also noted in the reference Mai and Alquier (2017), their proposed algorithm can run into slow convergence and can be arbitrarily slow as the system dimensionality increases. In this paper, we propose a novel efficient MCMC algorithm for the prob-estimator through exploring the adaptive proposal and subsampling scheme.
4.1 A preconditioned Crank-Nicolson adaptive proposal
Borrowing motivation from the recent work in Lukens et al. (2020) that proposes an efficient sampling procedure for Bayesian quantum state estimation (which improve the computation of the “dens-estimator” in Mai and Alquier (2017) only), we introduce an efficient adaptive Metropolis-Hastings implementation for the prob-estimator in Mai and Alquier (2017). We remind that the prob-estimator shows better performance than the dens-estimator both in theory and simulations.
Specifically, we propose to use a modification of random-walk MH by scaling the previous step before adding a random move and generating the proposal \( z' \). Following Cotter et al. (2013) who introduced an efficient MCMC approach eliminating the “curse of dimensionality”, termed as “preconditioned Crank-Nicolson”, we use the proposal for \(z_j\) as
where \( \beta _z \in (0,1) \) is a tuning parameter. This proposal is a scaled, by the factor \( \sqrt{1-\beta _z^2} \), random walk that results in a slightly simpler acceptance probability. Unlike the independent proposal in Mai and Alquier (2017) (with \( \beta _z=1 \)) where the acceptance probability can vary substantially, this kind of adaptive proposal allows one to control the acceptance rate efficiently. For \( \beta _y \in (0,1) \), we slightly modify the proposal for y from Mai and Alquier (2017) (with \( \beta _y =1 \)) as
The acceptance ratio \( \min \{1, A(x' | x^{(k)}) \} \) are followed from the standard form for MH (Robert and Casella 2013). Let \( p(x' | x^{(k)} ) \) denote the proposal density, we have
where
4.2 Speeding up by subsampling
We remind that the log (pseudo-)likelihood, \( \log L_D(x) = - \lambda \Vert p_\nu - {\hat{p}} \Vert ^2_F \), is the Frobenius norm of a matrix of dimension \( 3^n \times 2^n \) and thus for large n it will be very costly to evaluate at each iteration. For example, with \( n=7 \), this matrix is of dimension \( 2187\times 128 \). Therefore, we propose to evaluate a random subset of this matrix at each iteration. More precisely, at each iteration, we draw uniformly at random a subset \( \Omega \) of indices of the \( 3^n \times 2^n \) matrix. Then, the log pseudo-likelihood, \( \log L_D(x) \), is approximated by
As a consequence, the acceptance rate corresponding with this subsampling is denoted by \( A_\Omega ( x^\prime | x^{(k)}) \). It is noted that this kind of using subsampling to speeding up MCMC algorithms is becoming popular in the computational statistics community, see for example Quiroz et al. (2018b), Maire et al. (2019), Quiroz et al. (2018a) and Alquier et al. (2016a).
The details of our novel adaptive MH is given in Algorithm 1.

5 Numerical studies
5.1 Simulations setups and details
To assess the performance of our new proposed algorithm, a series of experiments were conducted with simulated tomographic data. More particularly, we consider the following setting for choosing the true density matrix, with \( n=2,3,4, \) (\(d=4,8,16 \)):
-
Setting 1: we consider the ideal entangled state which is characterized by a rank-2 density matrix that
$$\begin{aligned} \rho _{rank-2} = \frac{1}{2}\psi _1 \psi _1^{\dagger } + \frac{1}{2}\psi _2 \psi _2^{\dagger } \end{aligned}$$with \( \psi _1 = u /\Vert u\Vert \) and \( u = (u_1, \ldots , u_{d/2}, 0,\ldots ,0 ), u_1 = \ldots = u_{d/2} =1 \); \( \psi _2 = v /\Vert v\Vert \) and \( v = (0,\ldots ,0, v_{d/2 +1}, \ldots , v_d ), v_{d/2} = \ldots = v_d = 1 \).
-
Setting 2: a maximal mixed state (rank-d) that is
$$\begin{aligned} \rho _{mixed} = \sum _{i=1}^d \frac{1}{d}\psi _i \psi _i^{\dagger }, \end{aligned}$$with \( \psi _i \) are normalized vectors and independently simulated from \( {{\mathcal {C}}}{{\mathcal {N}}}(0,I_d) \).
The experiments are done following Sect. 2 for \( m=1000 \). The prob-estimator is employed with \( \lambda = m/2 \) and a prior with \( \alpha =1 \) which are theoretically guaranteed from Theorem 1 in reference Mai and Alquier (2017). We compare our adaptive MH implementation, denoted by “a-MH”, against the (random-walk) in Mai and Alquier (2017), denoted by “MH”; where all algorithms are run with 1000 iterations and 200 burnin steps. We run 50 independent samplers for each algorithm, and compute the mean of the square error (MSE),
for each method, together with their standard deviations. We also measure the mean absolute error of eigen values (MAEE) by
where \( \lambda _i (A) \) are the eigen values of the matrix A.
5.2 Significantly speeding up

Plot to compare the running times (s) in log-scale for 10 steps of two algorithms in the setup of Setting 1, for the qubits \( n =2,4,6,7 \) (\( d= 4, 16, 64, 128 \)). “MH” is from reference Mai and Alquier (2017); “a-MH” is the Algorithm 1 without subsampling; “a-MH-30%” is the Algorithm 1 with subsampling 30%; “a-MH-60%” is the Algorithm 1 with subsampling 60%
From Fig. 1, it is clear to see that our adaptive MH implementation is greatly faster than the previous implementation from Mai and Alquier (2017) by at least two orders of magnitude as the number of qubits increase. The data are simulated as in Setting 1 for \(n=2,4,6,7\) for which the dimensions of the density matrix are \( d= 4, 16, 64, 128 \) and of the empirical frequencies matrices \( [{\hat{p}}_{{\mathbf {a}}, {\mathbf {s}}}] \) are \( 9\times 4, 81 \times 16, 729\times 64, 2187\times 128 \). More specifically, for \(n = 6 \), our adaptive MH gives \(\sim \)115.9 times speedup comparing to the naive “MH” algorithm in Mai and Alquier (2017) and for \( n=7 \) the speedup is \(\sim \)251.1 times.
In addition, subsampling approaches also save the computational times respectively with the volume of the subsets, for example “a-MH-30%” will save the computational time by 2/3 while “a-MH-60%” will save the computational time by 1/3 of the full data approach “a-MH”. We note that these improvements are quite significant for practical quantum tomography where computational time is a precious resource.
5.3 Tuning parameters via acceptance rate
The tuning parameters \( \beta _y , \beta _z \) are chosen such that the acceptance rate of Algorithm 1 is between 0.15 and 0.3. This interval is chosen to enclose 0.234, the optimum acceptance probability for random-walk Metropolis-Hastings (under assumptions) (Gelman et al. 1997). For example, as in our experiments, for \( n=2 \) qubits: \( \beta _y = 0.33 , \beta _z = 0.2 \); for \( n=3 \) qubits: \( \beta _y = 0.03 , \beta _z = 0.03 \) and for \( n=4 \) qubits: \( \beta _y = 0.03 , \beta _z = 0.02 \) (all are run with \(\alpha =1, \lambda = m/2\)). We note that as the number of qubits n increase, these tuning parameters tend to be smaller and smaller to assure that the acceptance rate is between 0.15 and 0.3.
As an illustration, we conduct some simulations with \(n = 4 \) qubits in Setting 2. It can be seen from Fig. 2 that the acceptance rate between 0.2 and 0.3 would be optimal, as in Gelman et al. (1997). Where as high acceptance rate like 0.7 could make the algorithm be trapped at local points, and very small acceptance rate as 0.1 could make the algorithm converge slower.

Boxplots to examine the effect of the acceptance rate to MSE. The simulations are run within Setting 2 for \(n=4 \)

Plots to compare the errors of two algorithms in different settings and with varying the number of qubits \( n =2,3,4, 5 \). The top 2 boxplots from left to right are in Setting 1, the bottom 2 boxplots from left to right are in Setting 2. “MH” is from reference Mai and Alquier (2017); “a-MH” is the Algorithm 1 with full data
5.4 Similar accuracy with less variation
In term of accuracy performance, Fig. 3 compares the performance of our “a-MH” algorithm with the “MH” algorithm in various settings and varying the number of qubits \( n=2,3,4,5 \). The results show that both algorithms share similar accuracy in term of both considered errors (MSE and MAEE). However, it shows a clear improvement that our proposed adaptive algorithm yields much stable results (with less variation) compared to the naive MH approach as expected.
Results on subsampling are given in Fig. 4, where we further examine the performance of the “a-MH” algorithm with full data against subsampling the data by 60% and 30%. The outputs show that the subsampling approaches return comparable results. More specifically, in the cae of low-rankness (Setting 1), the subsampling approaches share similar accuracy (with higher variation) with the full data approach. In the case of mixed state (Setting 2), the subsampling approaches seem to return smaller error in term of mean squared errors, however their mean absolute error of eigen values (MAEE) are slightly higher than the full data approach. This can be explained as the target distribution of the subsampling algorithm is just an approximation of the target distribution in the full setting, thus the mean posterior could be well approximated but higher variation, (Quiroz et al. 2018b; Maire et al. 2019; Quiroz et al. 2018a; Alquier et al. 2016a).
Additional simulation regarding sensitivity analysis for different values of \( \lambda \) and \( \alpha \) are given in Fig. 5 in the Appendix.

Plots to compare the error of two algorithms in different settings and with \( n =4\). The top 2 boxplots from left to right are in Setting 1, the bottom 2 boxplots from left to right are in Setting 2. “adMH” is the Algorithm 1 with full data; “sub30adMH" is “adMH” with subsampling 30% the data; “sub60adMH" is “adMH” with subsampling 60% the data
6 Discussion and conclusion
We have introduced an efficient sampling algorithm for Pseudo-Bayesian quantum tomography, especially for the prob-estimator. Our approach use a preconditioned proposal and subsampling Metropolis-Hasting implementation which shows a clear improvement in convergence, computation and computational time comparing with a naive MH implementation. We would like to mention that such an improvement is significantly important for practical quantum state tomography.
As suggested by one of the anonymous reviewer, in practice, one could change the tuning parameters \( \beta _y , \beta _z \) in Algorithm 1 dynamically adaptively. For example, one could change the values of these parameter every fixed steps (say 500 or 1000 steps) so that the acceptance rate is between 0.15 and 0.3. This could be an important step to obtain a better mixing rate in the chain.
Last but not least, faster algorithms based on optimization, such as Variational inference (Alquier et al. 2016b), for Bayesian quantum tomography would be an interesting research problem. However, it should be noted that the analysis of the uncertainty quantification when using Variational inference is not known up to present, while this matter is an important aspect in the problem of quantum state estimation.
Data availibility statement
The R codes and data used in the numerical experiments are available at: https://github.com/tienmt/bqst.
References
Alquier P, Butucea C, Hebiri M, Meziani K, Morimae T (2013) Rank-penalized estimation of a quantum system. Phys Rev A 88(3):032113
Alquier P, Friel N, Everitt R, Boland A (2016a) Noisy monte carlo: convergence of markov chains with approximate transition kernels. Stat Comput 26(1–2):29–47
Alquier P, Ridgway J, Chopin N (2016b) On the properties of variational approximations of gibbs posteriors. J Mach Learn Res 17(1):8374–8414
Artiles L, Gill R, Guţă M (2005) An invitation to quantum tomography. J R Stat Soc Ser B 67:109–134
Baier T, Petz D, Hangos KM, Magyar A (2007) Comparison of some methods of quantum state estimation. In: Quantum probability and infinite dimensional analysis, QP–PQ: Quantum Probab. White Noise Anal., vol 20, World Sci. Publ., Hackensack, pp 64–78, https://doi.org/10.1142/9789812770271_0007
Bégin L, Germain P, Laviolette F, Roy JF (2016) Pac-bayesian bounds based on the rényi divergence. In: Proceedings of the 19th international conference on artificial intelligence and statistics, pp 435–444
Bissiri PG, Holmes CC, Walker SG (2016) A general framework for updating belief distributions. J R Stat Soc Ser B (Stat Methodol). https://doi.org/10.1111/rssb.12158
Blume-Kohout R (2010) Optimal, reliable estimation of quantum states. N J Phys 12(4):043034
Butucea C, Guţă M, Kypraios T (2015) Spectral thresholding quantum tomography for low rank states. N J Phys 17(11):113050. http://stacks.iop.org/1367-2630/17/i=11/a=113050
Bužek V, Derka R, Adam G, Knight P (1998) Reconstruction of quantum states of spin systems: from quantum bayesian inference to quantum tomography. Ann Phys 266(2):454–496
Cai T, Kim D, Wang Y, Yuan M, Zhou HH (2016) Optimal large-scale quantum state tomography with pauli measurements. Ann Statist 44(2):682–712. https://doi.org/10.1214/15-AOS1382
Catoni O (2007) PAC-Bayesian supervised classification: the thermodynamics of statistical learning. IMS Lecture Notes—Monograph Series, 56, Institute of Mathematical Statistics, Beachwood
Cotter SL, Roberts GO, Stuart AM, White D (2013) MCMC methods for functions: modifying old algorithms to make them faster. Stat Sci 28:424–446
Cottet V, Alquier P (2018) 1-bit matrix completion: Pac-bayesian analysis of a variational approximation. Mach Learn 107(3):579–603
Dalalyan A, Tsybakov AB (2008) Aggregation by exponential weighting, sharp pac-bayesian bounds and sparsity. Mach Learn 72(1–2):39–61
Ferrie C (2014) Quantum model averaging. N J Phys 16(9):093035
Gelman A, Gilks WR, Roberts GO (1997) Weak convergence and optimal scaling of random walk metropolis algorithms. Ann Appl Probab 7(1):110–120
Gonçalves D, Azevedo C, Lavor C, Gomes-Ruggiero M (2018) Bayesian inference for quantum state tomography. J Appl Stat 45(10):1846–1871
Gross D (2011) Recovering low-rank matrices from few coefficients in any basis. IEEE Trans Inf Theory 57(3):1548–1566. https://doi.org/10.1109/TIT.2011.2104999
Gross D, Liu YK, Flammia ST, Becker S, Eisert J (2010) Quantum state tomography via compressed sensing. Phys Rev Lett 105(15):150401
Grünwald P, Van Ommen T et al (2017) Inconsistency of bayesian inference for misspecified linear models, and a proposal for repairing it. Bayesian Anal 12(4):1069–1103
Guţă M, Kypraios T, Dryden I (2012) Rank-based model selection for multiple ions quantum tomography. N J Phys 14(10):105002
Hradil Z, Řeháček J, Fiurášek J, Ježek M (2004) 3 maximum-likelihood methodsin quantum mechanics. In: Quantum state estimation, Springer, pp 59–112
James DFV, Kwiat PG, Munro WJ, White AG (2001) Measurement of qubits. Phys Rev A 64:052312. https://doi.org/10.1103/PhysRevA.64.052312
Kravtsov K, Straupe S, Radchenko I, Houlsby N, Huszár F, Kulik S (2013) Experimental adaptive bayesian tomography. Phys Rev A 87(6):062122
Kueng R, Ferrie C (2015) Near-optimal quantum tomography: estimators and bounds. N J Phys 17(12):123013. http://stacks.iop.org/1367-2630/17/i=12/a=123013
Lukens JM, Law KJ, Jasra A, Lougovski P (2020) A practical and efficient approach for bayesian quantum state estimation. N J Phys 22(6):063038
Mai TT (2021a) Efficient bayesian reduced rank regression using langevin monte carlo approach. arXiv preprint arXiv:2102.07579
Mai TT (2021b) Numerical comparisons between bayesian and frequentist low-rank matrix completion: estimation accuracy and uncertainty quantification. arXiv preprint arXiv:2103.11749
Mai TT (2022) Pac-bayesian matrix completion with a spectral scaled student prior. In: The 4th symposium on advances in approximate bayesian inference
Mai TT, Alquier P (2015) A bayesian approach for noisy matrix completion: optimal rate under general sampling distribution. Electron J Stat 9:823–841. https://doi.org/10.1214/15-EJS1020
Mai TT, Alquier P (2017) Pseudo-bayesian quantum tomography with rank-adaptation. J Stat Plan Inference 184:62–76
Maire F, Friel N, Alquier P (2019) Informed sub-sampling mcmc: approximate bayesian inference for large datasets. Stat Comput 29(3):449–482
Nielsen MA, Chuang IL (2000) Quantum Comput Quantum Inf. Cambridge University Press, Cambridge
Paris M, Řeháček J (2004) Quantum state estimation, Lecture Notes in Physics, vol 649. Springer-Verlag, Berlin. https://doi.org/10.1007/b98673
Quiroz M, Kohn R, Villani M, Tran MN (2018a) Speeding up mcmc by efficient data subsampling. J Am Stat Assoc 11(526)
Quiroz M, Villani M, Kohn R, Tran MN, Dang KD (2018b) Subsampling mcmc—an introduction for the survey statistician. Sankhya A 80(1):33–69
Řeháček J, Mogilevtsev D, Hradil Z (2010) Operational tomography: fitting of data patterns. Phys Rev Lett 105(1):010402
Robert C, Casella G (2013) Monte Carlo statistical methods. Springer, New York
Schmied R (2016) Quantum state tomography of a single qubit: comparison of methods. J Mod Opt 1142018:1–15. https://doi.org/10.1080/09500340.2016.1142018
Schwemmer C, Knips L, Richart D, Weinfurter H, Moroder T, Kleinmann M, Gühne O (2015) Systematic errors in current quantum state tomography tools. Phys Rev Lett 114:080403. https://doi.org/10.1103/PhysRevLett.114.080403
Seah YL, Shang J, Ng HK, Nott DJ, Englert BG (2015) Monte carlo sampling from the quantum state space. ii. N J Phys 17(4):043018
Shang J, Ng HK, Englert BG (2014) Quantum state tomography: Mean squared error matters, bias does not. arXiv preprint arXiv:1405.5350
Struchalin G, Pogorelov I, Straupe S, Kravtsov K, Radchenko I, Kulik S (2016) Experimental adaptive quantum tomography of two-qubit states. Phys Rev A 93(1):012103
Vogel K, Risken H (1989) Determination of quasiprobability distributions in terms of probability distributions for the rotated quadrature phase. Phys Rev A 40(5):2847
Zyczkowski K, Penson K, Nechita I, Collins B (2011) Generating random density matrices. J Math Phys 52(6):062201
Acknowledgements
TTM is supported by the Norwegian Research Council grant number 309960 through the Centre for Geophysical Forecasting at NTNU. I would like to warmly thank the anonymous referees who kindly reviewed the earlier version of this manuscript and provided valuable suggestions and enlightening comments that significantly improve the current version of the manuscript.
Funding
Open access funding provided by NTNU Norwegian University of Science and Technology (incl St. Olavs Hospital - Trondheim University Hospital).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Additional simulations for changing \( \lambda \) and \( \alpha \)
Appendix: Additional simulations for changing \( \lambda \) and \( \alpha \)
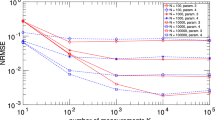
Here we further present some additional simulations for different values of \( \lambda \) and \( \alpha \). The simulations are carried out as in Setting 2 for 3 qubits. The results are given in Fig. 5. These results show that \( \lambda =m/2 \) would be an optimal choice while the effect of \( \alpha \) is not clearly determined.

Plots to compare the errors of Algorithm 1 in Setting 1 and with \( n =3 \)
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mai, T.T. An efficient adaptive MCMC algorithm for Pseudo-Bayesian quantum tomography. Comput Stat 38, 827–843 (2023). https://doi.org/10.1007/s00180-022-01264-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00180-022-01264-x