
Abstract
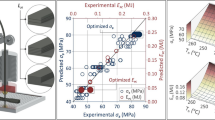
Controlling the contact force on workpieces is a challenging task for industrial deburring operations. To solve this issue, a novel constant force mechanism (CFM) based on the combination of positive and negative stiffness mechanism is proposed by using folding beam and bi-stable beam mechanisms. Without using any additional sensors and control algorithms, the proposed CFM can produce a travel range in constant force manner. In this paper, the design concepts, analytical model, finite element analysis (FEA) simulation and experimental studies are presented and discussed. Firstly, a novel spatial CFM is proposed and the pseudo rigid body (PRB) method is used to establish the mathematical model of the whole mechanism. Then, the FEA simulation is performed to validate the correctness of theoretical analysis. In addition, to eliminate the force variation, particle swarm optimization (PSO) method is utilized to find optimal architectural parameters solutions of the CFM. Finally, the experimental tests are performed to verify the performance of the designed CFM. The configuration design and parameter optimization proposed in this paper can be further applied to the design of other types of CFM mechanisms for polishing operations as well.










Similar content being viewed by others
Abbreviations
- CFM:
-
Constant force mechanism
- FEA:
-
Finite element analysis
- PRB:
-
Pseudo rigid body
- PSO:
-
Particle swarm optimization
- VCM:
-
Voice coil motor
- b :
-
Related to the bistable beam mechanism
- p :
-
Related to the folding beam mechanism
- θ :
-
Inclination angle
- L :
-
Length of a beam
References
Wan S, Zhang X, Wang W et al (2019) Effect of pad wear on tool influence function in robotic polishing of large optics. Int J Adv Manuf Technol 102:2521–2530
Tao B, Zhao X, Ding H (2019) Mobile-robotic machining for large complex components: a review study. Sci China-Technol Sci 62(8):1388–1400
Mohammad AEK, Wang D (2015) A novel mechatronics design of an electrochemical mechanical end-effector for robotic-based surface polishing. In: IEEE/SICE int symposium on sys integration (SII), pp 127–133
Domroes F, Krewet C, Kuhlenkoetter B (2013) Application and analysis of force control strategies to deburring and grinding. Mod Mecha Eng 3(2A):11–18
Zhu DH, Xu XH, Yang ZY et al (2018) Analysis and assessment of robotic belt grinding mechanisms by force modeling and force control experiments. Tribol Int 120:93–98
Khaghani A, Cheng K (2020) Investigation on multi-body dynamics based approach to the toolpath generation for ultraprecision machining of freeform surfaces. Proc Institut Mecha Eng Part B J Eng Manuf 234 (3):571–583
Kim U, Lee DH, Kim YB et al (2017) A novel 6-axis force/torque sensor for robotic applications. IEEE/ASME Trans Mechatron 22(3):1381–91
Budak E (2000) Improving productivity and part quality in milling of litanium based impellers by chatter suppression and force control. Ann ClRP 49(1):31–36
Tian F, Li Z, Lv C et al (2016) Polishing pressure investigations of robot automatic polishing on curved surfaces. Int J Adv Manuf Technol 87:639–646
Lopes A, Almeida F (2008) A force-impedance controlled industrial robot using an active robotic auxiliary device. Robot Comput Integr Manuf 24:299–309
Solanes JE, Gracia L, Benavent PM et al (2018) Adaptive robust control and admittance control for contact-driven robotic surface conditioning. Robot Comput Integr Manuf 54:115–132
Xian JS, Xi Z et al (2018) Fuzzy adaptive hybrid impedance control for mirror milling system. Mechatron 53:20–27
Latifinavid M, Donder A, Konukseven EI (2018) High-performance parallel hexapod-robotic light abrasive grinding using real-time tool deflection compensation and constant resultant force control. Int J Adv Manuf Technol 96(9-12):3403– 3416
Wang QL, Wang W, Zheng YL et al (2021) Force control-based vibration suppression in robotic grinding of large thin-wall shells. Robot Comput Integr Manuf 67:1–12
Xie QL, Zhao H, Wang T et al (2019) Adaptive impedance control for robotic polishing with an intelligent digital compliant grinder. Int Conf Intel Rob App pp 482–484
Xu XH, Zhu DH, Zhang HY et al (2019) Application of novel force control strategies to enhance robotic abrasive belt grinding quality of aero-engine blades. Chin J Aeronaut 32(10):2368–2382
Du H, Sun Y, Feng D et al (2015) Automatic robotic polishing on titanium alloy parts with compliant force/position control. Proc Instit Mech Eng Part B J Eng Manuf 7:1180–1192
Liao L, Xi FF, Liu KF (2008) Modeling and control of automated polishing/deburring process using a dual-purpose compliant toolhead. Int J Mach Tools Manuf 48(12-13):1454–1463
Satake U, Enomoto T, Obayashi Y et al (2018) Reducing edge roll-off during polishing of substrates. Prec Eng 51:97–102
Mohammad AEK, Hong J, Wang DW et al (2018) Design of a force-controlled end-effector with low-inertia effect for robotic polishing using macro-mini robot approach. Robot Comput Integr Manuf 49:54–65
Chen F, Zhao H, Li DW et al (2019) Contact force control and vibration suppression in robotic polishing with a smart end effector. Robot Comput Integr Manuf 57:391–403
Liu X, Zhang T, Li J et al (2018) A novel end-effector for robotic compliant polishing. IEEE Int Conf Rob Biomime pp 1858–1863
Tang J, Wang T, Yan ZQ et al (2016) Design and analysis of the end-effector of the flexible polishing robot. Key Eng Mater 693:58–63
Chaoui MD, Leonard F, Abba G et al (2019) Improving surface roughness in robotic grinding process, ROMANSY 22, Robot Design, Dynamics and Control. Springer, New York, pp 363–369
Holst GL, Teichert GH, Jensen BD (2011) Modeling and experiments of buckling modes and deflection of fixed-guided beams in compliant mechanisms. J Mechan Des 133:051002–1
Zhao J, Jia JY, He XB et al (2008) Post-buckling and snap-through behavior of inclined slender beams. J Appl Mechan 75:041020–1
Chi WW, Azid AA, Majlis BY (2010) Formulation of stiffness constant and effective mass for a folded beam. Arch of Mechan 62(5):405–418
Funding
This work is supported by the Huxiang High Level Talent Project of Hunan Province (Grant No. 2019RS1066), the Education Department of Hunan Province (Grant No. 19C1520), the National Natural Science Foundation of China (Grant No. 51575544), and the General Research Fund of the Research Grants Council(RGC) of Hong Kong, China (Grant No. PolyU 152137/19E).
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Author contribution
Bingxiao Ding wrote this paper and revised designed mechanism. Jiyu Zhao designed mechanism and conducted experimental verification. Bingxiao Ding and Yangmin Li revised this paper.
Availability of data and material
The data of this study are available from the first author or corresponding author upon reasonable request.
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ding, B., Zhao, J. & Li, Y. Design of a spatial constant-force end-effector for polishing/deburring operations. Int J Adv Manuf Technol 116, 3507–3515 (2021). https://doi.org/10.1007/s00170-021-07579-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-021-07579-1