
Abstract
The utilization of materials with high strength to density ratio enables efficiency improvements and is therefore demanded for many applications, particularly in the aerospace and other mobility sectors. However, the machining of these typically difficult-to-cut materials poses a challenge for conventional manufacturing technologies due to the high tool wear. Abrasive water jet (AWJ) machining is a promising alternative manufacturing technology for machining difficult-to-cut materials, since the tool wear is low and material independent. However, AWJ machining is limited regarding the producible geometries when conducting cuts through a material. This limitation can be resolved with AWJ milling operations which on the other hand are time-consuming. To approach this challenge, an enhanced AWJ milling operation is presented and investigated in this paper with the aim to expand the producible geometries. This operation consists of two kerfs, inserted from different sides of the workpiece, which intersect at their kerf ground. Consequently, a piece of material is separated without the cut material being entirely chipped. Thus, the operation possesses a high aggregated material removal rate. The investigations presented in this paper show and evaluate the effects that occur during the milling of kerfs with variable depths on titanium aluminide TNM-B1. Furthermore, a method to compensate these effects is introduced and thus the producible geometries for effective AWJ milling could be enhanced.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The AWJ technology inheres some desirable advantages over the conventional cutting processes milling, drilling and turning. These are, for example, the independence of the tool wear from the workpiece material, the absence of repercussions of the material surface on the cutting ability of the AWJ and the possibility to cut almost all kinds of materials brittle [1] and ductile [2]. Thus, AWJ is a promising technology, particularly to manufacture difficult-to-cut materials such as metal matrix composites (MMC), nickel base alloys [3], titanium aluminides [4], ceramics, ceramic matrix composites (CMC) [5] or carbon fibre-reinforced polymers (CFRP) [6]. Since the application of such materials is continuously increasing due to the demands of light weight design and efficiency requirements, the AWJ technology has attracted further attention and the market is continuously growing over the last years. However, the attainable surface quality of AWJ machining is limited. If a very high surface roughness is required for example for aerodynamic parts, AWJ machining might not fulfil these requirements. Consequently, a finishing operation, e.g. grinding, is required [7]. Therefore, the investigated AWJ technology is considered to be a near-net-shape fabrication technology.
Conventionally, the AWJ technology is a cutting process for sheet metal and other flat materials (Fig. 1a) [1]. However, since the producible geometries of this process are limited, further AWJ operations have been proposed and studied. Turning, milling and drilling [8] are some of the processes that can be adopted with the AWJ and are applied today. Milling without masks, shown in Fig. 1b, is a process of particular interest since this operation enables further geometrical design leeways [9]. AWJ milling operations have been tested and qualified for a number of materials including titanium aluminides [10]. To apply AWJ milling, the process parameters are usually changed. The water pressure p is reduced, the feed speed vf and the number of passes z are increased. These parameter settings generate a better surface quality but reduce the material removal rate. Because of the high feed speed acceleration and deceleration procedures of the manufacturing machine have to be considered for this operation [11]. To quickly design AWJ milling operations, van Bui et al. [12] have suggested the use of the Gaussian curve and its superposition to describe the material removal of the operation. Although a lot of fundamental and application knowledge about AWJ milling operations has been achieved [13], the application of the technology for industrial purposes is limited. The low use of the technology might be due to the decreased material removal rate and thus the long manufacturing time [9]. In order to increase the efficiency of the AWJ milling process, the superposition of two kerfs, cut from different sides of the workpiece (Fig. 1c), was suggested [14] and studied in detail by Faltin [15] and in previous investigations regarding the modelling possibilities [4], the implementation [16] and the cost-effectiveness [17] of the approach.

AWJ process variations: a cutting; b controlled depth milling; c segment removal by controlled depth cutting; d machining of a turbine blade using segment removal by controlled depth cutting
Faltin [15] demonstrated the feasibility of the approach and provided fundamental knowledge for its application. Furthermore, a model has been introduced to effectively design these AWJ milling operations in a previous work [4]. Following this approach, the AWJ milling operations can be designed and predicted by the use of a power coefficient cp and three coefficients c1 to c3 for the development of a kerf over the number of passes z. The formulae can be converted to formula 1, which calculates the feed speed vf(dK) necessary to attain a certain kerf depth for a given water pressure p and the number of passes z.
Both the modelling study [4] and the analysis by Faltin [15] consider only the cutting of constant kerfs depths (Fig. 1c). In order to further increase the producible geometries and to enhance the effectiveness of the presented efficient AWJ milling operation, it is necessary to adjust the kerf depth depending on the part design. Consequently, kerfs with variable kerf depths are investigated in this paper. Kerfs with variable kerf depths are necessary, e.g. for the manufacturing of a turbine blade. The operations of interest are cuts A and B (Fig. 1d). Once all cuts can be designed, the entire turbine blade including the blade and the fir tree connection can be manufactured by the efficient AWJ milling operation. In this study, titanium aluminide is considered workpiece material. This material is one of the above-described high-performance but difficult-to-cut materials. This material resists high stresses as well as high temperatures while offering a better strength to density ratio than nickel base alloys and thus promises further improvements in light weight design. Furthermore, titanium aluminides are partly used in gas turbines already. However, the manufacturing of titanium aluminides using conventional cutting remains a challenge [15]. Hence, the application of titanium aluminides might be promoted by a more efficient manufacturing technology.
To achieve variable kerf depths dK(x), the number of passes z, the water pressure p or the feed speed vf can be adjusted. Since the feed speed vf(dK) can be adjusted very precisely, this parameter is tested to ensure a homogeneous jet at all times. In the previous investigations [4], the use of an angle of cut αc for a milling operation has shown a distinct influence on the kerf parameters. Comparable effects must be expected for kerfs with variable kerf depths dK(x) as well.
2 Experimental setup
In order to investigate the possibility of cutting kerfs with variable kerf depths dK(x), a series of experiments were carried out. The investigation comprised a detailed analysis of the water jet’s behaviour and its deflection when cutting the desired concave and convex shapes. First, the general behaviour of the water jet was examined and visualized with a high-speed camera to better understand the fundamental effects occurring during the cutting. Secondly, an analogy test was performed in order to evaluate the strength of these effects. Third, a test plan was carried out cutting the desired kerfs with variable depths.
All experiments were performed by a robot-guided water jet machine type HRX 160 L by StM Stein-Moser GmbH, Schweinfurt, Germany (Fig. 2c). The cutting head was equipped with an orifice with a diameter of do = 0.25 mm, and a focus tube with a length of lf = 76.2 mm and a diameter of df = 0.76 mm. A stand of distance of ls = 2 mm was applied for all tests (Fig. 2a). Garnet mesh size 120 of GMA Garnet (Europe) GmbH, Hamburg, Germany, was used to cut the test material titanium aluminide, type Gamma-TiAl Ti-43,5Al-4Nb-1Mo 0,1B (TNM-B1). All kerf depths dK were measured using an optical measurement device MicroProf MPR 100 by FRT GmbH, Bergisch Gladbach, Germany. Three measurements were conducted per run.

Experimental setup: a input and target values of the high-speed recording and application tests; b setup of the high-speed recording tests; c water jet machine HRX 160 L by STM STEIN-MOSER GMBH, Schweinfurt, Germany; d input and target values of the analogy test
For the high-speed recording experiments, the camera was placed in front of the specimens, which were prepared in convex and concave shapes with a radius of r = 30 mm and a depth of ld = 1 mm. The length of the specimen was lW = 60 mm (Fig. 2a). The specimens were fixed in between two acrylic glass panes which had a squared shape. Thus, a convex and concave kerf was constructed which enables the recording of the AWJ effects in the kerf with the high-speed camera. Each video showed one specimen being machined once, number of passes z = 1, by the AWJ from one edge to the other for all parameter combination given in Table 1, except the given angle of cut αc. Every video was analysed in regard to the opening angle of the jetlag as well as the opening angle of the jet forerun at several workpiece positions pW. Additionally, the ratio of the intensity of the jetlag and the jet forerun was evaluated. The analysed positions were set in 5-mm steps between the specimen’s edges. Thus, 176 samples of the AWJ’s distributions were collected. The high-speed camera used to perform recordings of these first cutting experiments was a FASTCAM SA1.1 by Photron Deutschland GmbH, Reutlingen. The FASTCAM SA1.1 records video data which allowed frame-by-frame analysis. This provided the possibility to select valid image data by manually choosing an appropriate frame. The video was recorded with 10,000 frames per second (fps) and a resolution of 512 × 512 pixels. For the lighting of the experimental setup, spotlights from the front and from the back were used to obtain sufficient brightness in the imagery (Fig. 2b).
The analogy tests were conducted applying the same test plan from the high-speed recording test regarding the parameters water pressure p, feed speed vf and abrasive flow rate ṁA. The setup was modified in a way that the angle of cut αc remains constant for one cut (Fig. 2d). Hence, the factor “Shape” (Table 1) was replaced by the constant angles of cut αc(y). The setup comprised a primary target part (PTP) installed beneath the jet under the angles of cut αc(y). The jet moved along the x-axis causing a kerf and a jet deflection towards a secondary target part (STP). To investigate the intensity of the jet and the strength of its deflection, the resulting kerf depths on the primary dK,p and the secondary dK,s target parts were measured for 32 parameter settings.
The application tests comprise the milling of kerfs with variable kerf depth dK(x). The tests were carried out by the adaption of the feed speed vf(dK). The application tests were set up to mill the shapes described in the high-speed recording experiments with a radius of r = 30 mm, a maximum kerf depth of \({d}_{\mathrm {K}, \max \limits }\) = 30 mm and a minimum kerf depth of \(d_{\mathrm {K}, \min \limits }\) = 15 mm (Fig. 2a). The values for the feed speed vf(dK) were derived using formula 1 with the coefficients and parameters given in Table 2. These parameters predict the kerf depth dK of constant kerfs. The milling of variable kerf depths dK(x) is likely to influence the kerf depth beyond the effects described by formula 1. This influence can be expected since the cutting conditions are changed compared with the cutting of constant kerf depth. Therefore, a test plan (Table 2) was performed to find suitable parameters. The tests were preformed twice to ensure repeatability. In order to measure the kerf depths, the specimens were separated along the kerf using EDM. Afterwards, the kerf depth was measured on the remaining kerf profiles every 2 mm.
3 Results
The main effects of the opening angles observed during the high-speed recording investigations are shown in Fig. 3. The diagram shows that in average the opening angles are approximately two times higher for the concave geometries. In addition, the opening angle of the jet forerun for concave shapes αjf,a is higher for high angles of cut (αc > 90°) at the beginning of the workpiece. The jetlag of the concave geometry αjl,a shows a reversed behaviour and has higher opening angles for lower angles of cut (αc < 90°) at the end of the workpiece. The convex geometry shows an opposite behaviour compared with the concave geometry, considering the position on the workpiece pW. If the angle of cut αc is considered, the opening angle of the jet forerun αjf,x is as well higher for high angles of cut αc > 90°. In addition, the opening angle of the jetlag αjl,x is higher for lower angles of cut αc > 90°.

Main effects of the jetlag and the jet forerun opening angles
Besides the opening angles, the intensity of the jetlag and the jet forerun have been analysed. This observation resulted in a linear increase of the jetlag’s intensity. The increase was found for the concave geometry between the position of the workpiece pW = 15 to 45 mm. Correspondingly, the effects are reversed for the convex geometry and the jet forerun.
The main effects of the kerf depth of the analogy test are depicted in Fig. 4. The diagram shows that the primary kerf depth dK,p increases with increasing angle of cut αc, starting at αc = 22.5° until the kerf depth reaches a peak at αc = 67.5°. For the angle of cut αc = 90°, the kerf depth is reduced. The secondary kerf depth dK,s continuously decreases with increasing angle of cut αc until dK,s = 0 mm at an angle of cut of αc = 90°. Considering the setup of the tests, the results can be mirrored by αc = 90° to higher angles. Thus, the value of the angle of cut of αc = 67.5° also applies for the angle of cut of αc = 112.5° and the angle of cut of αc = 45° for the angle of cut of αc = 135°, and the angle of cut of αc = 157.5° equals the angle of cut of αc = 22.5°. In Fig. 4, only the values of the angle of cut of αc = 67.5° are mirrored towards the angle of cut of αc = 112.5°.

Main effects of the kerf depth caused by the primary and the secondary jet
Figure 5 shows the results of the convex kerfs of the application experiments. The black line marks the target kerf. The arrow bars indicate the standard deviation s of the kerf depth. The diagram shows that the results are well distributed around the target kerf. All kerfs seem to fit the target kerf in a sufficient manner. The difference caused by the parameter settings does not change the shape of the kerf and the average difference between lowest and the deepest kerf depth is dK,diff = 10.7 mm. The best kerf regarding the convex shape seems to be the parameter with high feed speed and high water pressure p.

Results of the application test: kerf depth dK of the convex kerfs with variable kerf depth
The kerf depth results of the concave shape are more diversified (Fig. 6). In comparison with the convex shape, the kerf depths of the different parameter combinations are much further apart, with an average difference of the kerf depth of dK,diff = 20.4 mm. Furthermore, none of the parameter settings was able to fit the concave shape flawless regardless of the depth. Notably, most of the curves seem to have a flattened beginning and end.

Results of the application test: kerf depth dK of the concave kerfs with variable kerf depth
4 Discussion
The results of the high-speed recording investigations demonstrated that there is a general difference regarding the opening angles between convex and concave geometries. Furthermore, the test reveals that all opening angles are low at very high αc = 146° and very low αc = 34° angles of cut. The cutting intensity of the jetlag or the jet forerun is likely to depend on the opening angles and the intensity of the jet deflection. If a point on the workpiece outside the primary jet is observed, high opening angles of the secondary jet have little impact on this point since the intensity is spread out. However, small opening angles might have a strong effect on this point. Consequently, the highest cutting potential of the secondary jet can be expected for convex geometries at very low angles of cut αc due to the jetlag and at very high angles of cut αc due to the jet forerun. High cutting potential can also be expected for concave geometries at very high angles due to the jet forerun and at very low angles due to the jetlag.
The results of the analogy test confirm this assumption and make this effect appraisable. The test reveals that the kerf depth created by the secondary jet increases with a highly increased or highly decreased angle of cut αc. However, the test shows that the combined kerf depth does not increase due to the decreasing primary kerf depth.
The application test in Fig. 6 shows very different results compared with Fig. 5, although only the shape of the radius r was changed from convex to concave. Consequently, the effects described above must interact with the cutting of variable kerf depths. The convex geometry is in average well reproduced by the approach. However, if the model [4] would be applicable, the parameter setting with p = 100 MPa and \({v}_{\mathrm {f}, \max \limits }\) = 6000 mm/min should have reproduced the shape accurately. The offset between the measured kerf depth dK,m and the target value can be explained by the fact that neither jetlag nor the jet forerun effects the kerf ground at any moment. Considering that even at constant kerf depths the jetlag clearly contributes to the deepening of the kerf [15], it seems that this effect is not present, or strongly reduced, for convex shapes. Hence, a factor needs to be considered which quantifies the difference between kerfs with constant kerf depths and kerfs with convex geometry. This convex geometry factor fx(r) is most likely to depend on the radius r of the convex geometry. For the given results, a convex geometry factor fx(r = 30 mm) = 1.6 is calculated with a standard deviation of s = 0.1. This factor can be expected to decrease for increasing radii until fx = 1 and increase for even smaller radii.
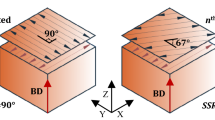
In order to understand the large deviations of the kerf depths dK for the concave geometry, it is necessary to consider the cutting effects of the jet at every point during the cutting for every stage of the kerf depth dK (Fig. 7a). Firstly, the cutting of a constant kerf depth, angle of cut αc = 90°, needs to be analysed. Since the shape of the kerf changes during the pass of the water jet an actual cutting angle αc,real occurs and can be estimated from the geometrical conditions. Figure 7b demonstrates that the real cutting angle can be calculated to be αc,real = 84, if a jet diameter of dJ = 0.8 mm and a kerf depth of dK1 = 0.086 mm is assumed for an angle of cut of αc = 90° and the number of passes z = 1. Consequently, the results shown in Fig. 4 should be reduced by αc − αc,real = 6° in order to correlate with the results of the variable kerf depths dK(x). Following this idea, the expected kerf depth dK is depicted in Fig. 7. Figure 7 shows the expected kerf depth dK starting from an adjusted angle of cut of \({\alpha ^{\prime }}_{\mathrm {c}} = 90^{\circ }\) (αc = 84°). In the diagram, the kerf depth for one pass dK1, taken from Fig. 4, is shown in percent. This 100% value is linked to the calculation of formula 1. The diagram in Fig. 7c shows that if a higher angle is strived, the kerf depth for a pass dK1 is lower than the expectation by formula 1 at first. Once an adjusted angle of cut of \({\alpha ^{\prime }}_{\mathrm {c}} = 103\) is reached, the kerf depth for a pass dK1 reaches again its target value given by formula 1. Afterwards, the kerf depth per pass dK1 is higher than the calculation with a peak at the angle of cut of \({\alpha ^{\prime }}_{c} = 120^{\circ }\). In addition to the kerf depth per pass dK1, the average cumulated kerf depth dK,c is introduced. This value represents the expected deviation of the kerf depth dK from the kerf depth given by formula 1 representing 100%. Consequently, also the average cumulated kerf depth dK,c is lower than the expected value for the first passes z. The average cumulated kerf depth dK,c fits with the expectation at an adjusted angle of cut of \({\alpha ^{\prime }}_{\mathrm {c}} = 112^{\circ }\). From this point forward, every additional pass increases the kerf depth dK disproportionately. Thus, the kerf becomes deeper than expected by the prediction.

Effects during the cutting of concave kerfs: a kerf formation; b real cutting angle αc,real; c kerf depth for a pass dK1, average cumulated kerf depth dK,c, concave geometry factor fa
In conclusion, the model for constant kerf depths dK [4] only fits for the adjusted angle of cut of \({\alpha ^{\prime }}_{\mathrm {c}} = 90^{\circ }\) and \({\alpha ^{\prime }}_{\mathrm {c}} = 112^{\circ }\). Between these values, the kerfs are too low. For higher adjusted angle of cut of \({\alpha ^{\prime }}_{\mathrm {c}}\), the kerfs are too high. Thus, the results of Fig. 6 can be explained. Lower AWJ parameter settings, e.g. a water pressure of p = 100 MPa and a feed speed of vf = 6000 mm/min, cause a slower growth. Consequently, most of the cutting happens in the area below the adjusted angle of cut of \({\alpha ^{\prime }}_{\mathrm {c}}\) = 103° resulting in a reduced kerf depth dK. On the other hand, AWJ parameter settings with a higher water pressure p allow a quick transition to the adjusted angle of cut of \({\alpha ^{\prime }}_{\mathrm {c}} = 103^{\circ }\) and above causing a kerf deeper than predicted. This deliberation provides a reasonable explanation for the large deviation of the kerf depth dK for concave geometries.
In order to predict these effects, a concave geometry factor \({f}_{\mathrm {a}}({\alpha ^{\prime }}_{\mathrm {c}})\) can be implemented. This concave geometry factor \({f}_{\mathrm {a}}({\alpha ^{\prime }}_{\mathrm {c}})\) depends on the desired angle of cut αc. Since the radius r of the concave geometry effects the angle of cut αc, the concave geometry factor fa also depends on the radius r. As a first approximation the factor \({f}_{\mathrm {a}}({\alpha ^{\prime }}_{\mathrm {c}})\) can be derived from the average cumulated kerf depth dK,c. The factor is given in Fig. 7.
A final test was conducted to validate the ability of the concave geometry factor fa and the convex geometry factor fx. Therefore, the shape of a turbine blade was implemented using a convex geometry factor fx = 1.15 (Fig. 8). In addition, the concave geometry factor fa was calculated and implemented for every point on the workpiece pW. The relative velocities rvf calculated by both geometry factors are given in Fig. 8, along with all other parameters applied. The cuts along the turbine blade Cb were as well conducted by the AWJ. Since there is no kerf depth variation, the formula 1 has been applied without further adjustments. This test reveals that the deviation e of the kerf depth to the target kerf is less than e = 0.5 mm. Hence, the application of the geometry factors allows the manufacturing of precise variable kerf depths using the feed speed vf as control parameter.

Validation test of the geometry factors
5 Conclusion
The objective of this investigation was to identify and evaluate the effects that occur during the cutting of variable kerf depths dK(x) using abrasive water jet machining. Three investigations, including a cutting observation using a high-speed camera, an analogy test and an application test, have been conducted, measured and analysed. The paper presents and discusses the effects observed in the high-speed recording tests and the interactions of the effects during the cutting of the kerfs. The main results can be summarized as follows:
-
A concave geometry factor fa and a convex geometry factor fx have been introduced to describe the difference between the constant and variable kerf depths
-
The convex geometry factor adjusts the decreased effects of the jet deflection and jet forerun for convex shapes. Consequently, the convex geometry factor depends on the radius r and increases with decreasing radii.
-
The more complex relation of convex shapes are compensated by the concave geometry factor \({f}_{\mathrm {a}}({\alpha ^{\prime }}_{\mathrm {c}})\). This factor accounts for the variations of the adjusted angle of cut \({\alpha ^{\prime }}_{\mathrm {c}}\) and thus depends on the angle of cut αc and consequently on the radius r. Compared with the convex geometry factor, the concave geometry factor varies for every point over a concave kerf.
-
In combination, both factors allow the adjustment of the parameters of a constant kerf depth for variable kerf depths. As a result, the geometric possibilities for near-net-shape fabrication with the AWJ are extended allowing the manufacturing of the shape of a turbine blade.
-
Thus, this AWJ milling operation can help to efficiently machine difficult-to-cut materials such as titanium aluminides and foster the efficiency improvements associated with these materials.
Abbreviations
- ṁ A :
-
Abrasive flow rate
- \({\alpha ^{\prime }}_{\mathrm {c}}\) :
-
Adjusted angle of cut
- α c(y) :
-
Constant angles of cut
- α c,real :
-
Actual cutting angle
- α c :
-
Angle of cut
- α jf,a :
-
Opening angle of the jet forerun for concave shapes
- α jf,x :
-
Opening angle of the jet forerun for convex shapes
- α jl,a :
-
Opening angle of the jetlag for concave shapes
- α jl,x :
-
Opening angle of the jetlag for convex shapes
- AWJ:
-
Abrasive water jet
- c 1 :
-
Kerf development coefficient 1
- c 2 :
-
Kerf development coefficient 2
- c 3 :
-
Kerf development coefficient 3
- c p :
-
Power coefficient
- CFRP:
-
Carbon fibre-reinforced polymers
- CMC:
-
Ceramic matrix composites
- d f :
-
Focus tube diameter
- d J :
-
Jet diameter
- d K,c :
-
Average cumulated kerf depth
- d K,diff :
-
Difference between lowest and the deepest kerf depth
- \(d_{\mathrm {K}, \max \limits }\) :
-
Maximum kerf depth
- \(d_{\mathrm {K}, \min \limits }\) :
-
Minimum kerf depth
- d K,m :
-
Measured kerf depth
- d K,p :
-
Kerf depths on the primary target part
- d K,s :
-
Kerf depths on the secondary target part
- d K1 :
-
Kerf depth for one pass
- d K :
-
Kerf depth
- d o :
-
Orifice diameter
- e :
-
Deviation of the kerf depth to the target kerf
- EDM:
-
Electrical discharge machining
- f a :
-
Concave geometry factor
- f x :
-
Convex geometry factor
- fps:
-
Frames per second
- l d :
-
Depth of specimen
- l f :
-
Focus tube length
- l s :
-
Stand of distance
- l W :
-
Length of specimen
- MMC:
-
Metal matrix composites
- p :
-
Water pressure
- p W :
-
Workpiece position
- PTP:
-
Primary target part
- r :
-
Radius of shape
- r vf :
-
Relative velocity
- s :
-
Standard deviation
- STP:
-
Secondary target part
- TNM-B1:
-
Gamma-TiAl Ti-43,5Al-4Nb-1Mo 0,1B
- v f :
-
Feed speed
- z :
-
Number of passes
References
Hashish M (1984) A modeling study of metal cutting with abrasive waterjets. J Eng Mater Technol 1984:88–100
Zeng J, Kim TJ (1992) Development of an abrasive waterjet kerf cutting model for brittle materials. Jet Cutting Technol 13:483–501. https://doi.org/10.1007/978-94-011-2678-6_33
Liu X, Liang Z, Wen G, Yuan X (2019) Waterjet machining and research developments: a review. Int J Adv Manuf Tech 102:1257–1335. https://doi.org/10.1007/s00170-018-3094-3
Uhlmann E, Männel C (2019) Modelling of abrasive water jet cutting with controlled depth for near-net-shape fabrication. Procedia CIRP 81:920–925. https://doi.org/10.1016/j.procir.2019.03.228
Putz M, Dix M, Morczinek F, Dittrich M (2018) Suspension technology for abrasive waterjet (AWJ) cutting of ceramics. Procedia CIRP 77:367–370. https://doi.org/10.1016/j.procir.2018.09.037
El-Hofy M, Helmy MO, Escobar-Palafox G, Kerrigan K, Scaife R, El-Hofy H (2018) Abrasive water jet machining of multidirectional CFRP laminates. Procedia CIRP 68:535–540. https://doi.org/10.1016/j.procir.2017.12.109
Klocke F, Schmitt R, Zeis M, Heidemanns L, Kerkhoff J, Heinen D, Klink A (2015) Technological and economical assessment of alternative process chains for blisk manufacture. Procedia CIRP 35:67–72. https://doi.org/10.1016/j.procir.2015.08.052
Hashish M (1988) Turning, milling and drilling with abrasive-waterjets, 9th, International Symposium on Jet Cutting Technology 113–131
Fowler G, Shipway P, Pashby I (2005) Abrasive water-jet controlled depth milling of Ti6Al4V alloy − an investigation of the role of jet-workpiece traverse speed and abrasive grit size on. J Mater Process Technol 161:407–414
Kong MC, Axinte D, Voice W (2010) Aspects of material removal mechanism in plain waterjet milling on gamma titanium aluminide. J Mater Process Technol 210:573–584
Klocke F, Schreiner T, Schüler M, Zeis M (2018) Material removal simulation for abrasive water jet milling. Procedia CIRP 68:541–546. https://doi.org/10.1016/j.procir.2017.12.110
van Bui H, Gilles P, Sultan T, Cohen G, Rubio W (2017) A new cutting depth model with rapid calibration in abrasive water jet machining of titanium alloy. Int J Adv Manuf Tech 93:1499–1512. https://doi.org/10.1007/s00170-017-0581-x
Axinte DA, Karpuschewski B, Kong MC, Beaucamp AT, Anwar S, Miller D, Petzel M (2014) High energy fluid jet machining (HEFJet-mach): from scientific and technological advances to niche industrial applications. CIRP Ann Manuf Technol 63: 751–771. https://doi.org/10.1016/j.cirp.2014.05.001
Laurinat A (1994) Abtragen mit Wasserabrasivinjektorstrahlen. Dissertation, Universität Hannover
Faltin F (2018) Endkonturnahe Schruppbearbeitung von Titanaluminid mittels Wasserabrasivstrahlen mit kontrollierter Schnitttiefe. Dissertation, Technische Universität Berlin
Uhlmann E, Männel C, Flögel K, Faltin F (2017) Case study on possible productivity improvements of waterjet turning operations. WaterJet Technology Association, 2017 WJTA-IMCA Conference: A1
Uhlmann E, Männel C (2018) 3D-Vorkonturierung mittels Wasserabrasivstrahl. ZWF Zeitschrift für wirtschaftlichen Fabrikbetrieb 113:479–483. https://doi.org/10.3139/104.111950
Funding
Open Access funding enabled and organized by Projekt DEAL. This paper is based on results acquired in the project DFG UH 100/165-3, which is kindly supported by the Deutsche Forschungsgemeinschaft (DFG).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Uhlmann, E., Männel, C. & Braun, T. Efficient abrasive water jet milling for near-net-shape fabrication of difficult-to-cut materials. Int J Adv Manuf Technol 111, 685–693 (2020). https://doi.org/10.1007/s00170-020-06074-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-020-06074-3