
Abstract
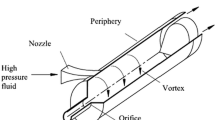
A new air bearing element called as vortex bearing is introduced and investigated in this study. In comparison to the conventional orifice bearing, the new bearing is characterized by blowing air through tangential nozzles to form a vortex flow. The study focuses on one vortex-bearing element to investigate its basic characteristics (flow rate characteristics, pressure and velocity distributions, load capacity, and static stiffness). We show that the vortex bearing uses vortex flow to form a sunken negative pressure distribution at the central area, so that it can narrow the gap clearance between the workpiece and the bearing and thereby improve the flotation stiffness. Moreover, blowing air tangentially instead of emitting onto the workpiece directly can avoid the formation of intense pressure distribution on the workpiece’s surface, which would reduce the partial stress concentration acting on the workpiece. For these reasons, the new vortex bearing is applicable in air conveyors that float and transport workpieces such as glass substrates and silicon wafers.
Similar content being viewed by others


References
Laurent GJ, Delettre A, Le FN (2011) A new aerodynamic-traction principle for handling products on an air cushion. IEEE Trans Robot 27:379–384
He X, Chen X (2007) The dynamic analysis of the gas lubricated stage in optical lithography. Int J Adv Manuf Technol 32:978–984
Paivanas JA, Hassan JK (1979) Air film system for handling semiconductor wafer. IBM J Res Develop 23(4):361–375
CoreFlow, www.coreflow.com/
New way air bearings, www.newwayairbearings.com/
Daiichi Institution Industry: http://www.daiichi-shisetsu.co.jp
Oiles corporation, http://www.oiles.co.jp/
Srinivas YL, Seetharamu KN, Parameswaran MA (1990) Investigation of air film conveyor pressurized through multiple holes. Finite Elem Anal Des 6:235–243
Lee HG, Lee DG (2006) Design of a large LCD panel handling air conveyor with minimum air consumption. Mech Mach Theory 41:790–806
Amano K, Yoshimoto S, Miyatake M (2011) Basic investigation of noncontact transportation system for large TFT-LCD glass sheet used in CCD inspection section. Precis Eng 35(1):58–64
Majumdar BC (1980) Externally pressurized gas bearings: a review. Wear 62:299–314
Gross WA (1963) Gas bearings: a survey. Wear 6:423–443
Devitt D (2009) The physics of glass flotation. Semicond Int Jpn 5:20–25
Stout KJ (1985) Design of aerostatic flat pad bearings using annular orifice restrictors. Tribol Int 18(4):209–214
Talukder HM, Stowell TB (2003) Pneumatic hammer in an externally pressurized orifice-compensated air journal bearing. Tribol Int 36(8):585–591
Ye YX, Chen XD, Hu YT, Luo X (2010) Effects of recess shapes on pneumatic hammering in aerostatic bearings. Proc Inst Mech Eng Part J-J Eng Tribol 224(3):231–237
Tomoo S, Shinichi T (1992) Improvement of the gas bearing stiffness by higher supply pressure (1st report). J Jpn Soc Precis Eng 58(4):621–627 (in Japanese)
Tomoo S, Shinichi T, Kunihiko U, Atsushi O (1992) Improvement of the gas bearing stiffness by higher supply pressure (2nd report). Journal of the Japan Society for Precision Engineering 58(12):1995–2000 (in Japanese)
Ozawa, Kakuda, Yasuda (2010) “Noncontact air conveyor”, Japan Patent, P2010-92724, April (in Japanese)
Li X, Horie M, Kagawa T (2011) ‘An Experimental Investigation on Vortex Bearing’. Proceedings of 2011 International Conference on Fluid Power and Mechatronics 697–702
Li X, Kawashima K, Kagawa T (2011) Computational fluid dynamics study of a noncontact handling device using air-swirling flow. J Eng Mech–ASCE 137(6):400–409
Karagoz I, Kya F (2007) CFD investigation of the flow and heat transfer characteristics in a tangential inlet cyclone. Int Commun Heat Mass Transf 34:1119–1126
Cortes C, Gil A (2007) Modeling the gas and particle flow inside cyclone separators. Prog Energy Combust Sci 33:409–452
Li X, Kawashima K, Kagawa T (2008) Analysis on vortex levitation. Exp Therm Fluid Sci 32:1448–1454
Kumar R, Conover T (1993) Flow visualization studies of a swirling flow in a cylinder. Exp Therm Fluid Sci 7:254–262
Possamai FC, Ferreira RTS, Prata AT (2001) Pressure distribution in laminar radial flow through inclined disks. Int J Heat Fluid Flow 22:440–449
Paivanas JA, Hassan JK (1981) Attraction force characteristics engendered by bounded, radially diverging air flow. IBM J Res Develop 25(3):176–186
Ervin JS, Suryanarayana NV, Hon CN (1989) Radial, turbulent flow of a fluid between two coaxial disks. J Fluids Eng-Trans ASME 111:378–383
Wark CE, Foss JF (1984) Forces caused by the radial out-flow between parallel disks. J Fluids Eng-Trans ASME 106:292–297
Currie IG (1993) Fundamental mechanics of fluids (2nd). McGraw-Hill
Bell S (2001) “A beginner’s Guide to Uncertainty of Measurement”. Good Measurement Practice Guide No.11, ISSN 1368-6550
Moffat RJ (1988) Describing the uncertainties in experimental results. Exp Therm Fluid Sci 1:3–17
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Uncertainty in the pressure distribution measurement experiment
In order to calculate the uncertainty in the pressure distribution measurement experiment (see Section 3.1), first we list the following factors that may cause measurement errors:
-
(1)
The pressure sensor has been calibrated and the calibration uncertainty is estimated to be 0.1 % of the maximum reading. Given that the pressure sensor is analogue, the resolution is usually 0.1 % of the full range. Moreover, the analog noise signal has been experimentally confirmed as being around 35 Pa.
-
(2)
The wire-type position encoder (digital) is used to record the position of the pressure value. The position error due to its calibration uncertainty and resolution affect the pressure measurement. Figure 10 shows that the intensively distributed region (e.g., around r = D 1/2) is very sensitive to the position error, while the sunken pressure distribution in the central region is hardly affected. Therefore, when converting the position error to pressure, the sensitivity coefficient is variable in a range of 0–680 Pa/mm, which can be calculated by differentiating the pressure versus position from the experimental pressure result of Fig. 10.
-
(3)
The supply flow rate is set as the experimental condition and measured by the thermal flow rate sensor. The flow rate error due to the calibration uncertainty and resolution would affect the pressure measurement. According to the experimental result shown in Fig. 10, we know that increasing the supply flow rate from 2 to 3 L/min lowers the central pressure by 550 Pa. In addition, the pressure at r = D 2/2 is atmospheric and thereby does not change in spite of the flow rate change. Therefore, the sensitivity coefficient is variable in a range of 0–550 Pa/mm.
-
(4)
The gap clearance is an experimental condition and measured by a dial meter. The gap clearance error, which is mainly caused by the calibration uncertainty and resolution of the dial meter, would affect the pressure measurement. Based on the experimental data of Fig. 13, we know that the 1-μm gap clearance change would lead to 70 Pa pressure change at the central region. However, there is little pressure change at r = D 2/2, where the pressure is atmospheric. Therefore, the sensitivity coefficient of the gap clearance error is variable in a range of 0–70 Pa/μm.
Because the measurement values are read and recorded by a computer, the error from reading and recording is disregarded. Further detailed information on the above possible error sources, e.g., specific values, probability distribution, and divisor, are listed in Table 4. Next, we convert these individual errors to the standard uncertainty in pascals and calculate the combined standard uncertainty by squaring the individual uncertainties, adding them, and then taking the square root of the total. Finally, we multiplied the result by a coverage factor (=2) to obtain the expanded uncertainty [31, 32].
The uncertainty of the pressure measurement is 40.0–74.8 Pa. This is based on the standard uncertainty multiplied by the coverage factor of 2, providing a level of confidence of approximately 95 %. Based on the above analysis, we also know that large uncertainty would be expected at around r = D 1/2 where the pressure distribution is intensive, while small uncertainty would appear at the peripheral region where the pressure is close to atmospheric pressure.
Appendix 2: Uncertainty in the bearing force measurement experiment
In order to calculate the uncertainty of the bearing force measurement (see Section 3.2), first, we list the following factors that may cause measurement errors:
-
(1)
The calibration uncertainty of the force sensor is estimated to be 0.1 % of the maximum reading. Given that the force sensor is analog, the resolution is usually 0.1 % of the full range. Moreover, the analog noise signal has been experimentally confirmed as being around 5 mN.
-
(2)
A laser displacement meter is used to record the position of the force value. Its calibration uncertainty, resolution, and noise signal would cause errors of gap clearance. According to the stiffness data of Fig. 15, we can easily determine the sensitivity coefficient that is variable in a range of 0–12 mN/μm.
-
(3)
As mentioned in Appendix 1, the flow rate sensor introduces a measurement error. Figure 14 shows that a flow rate change of 1 L/min would cause force changes of 0.125 N at the large clearance region. In addition, the bearing force is the same at the intersection position (h = h i ) despite the flow rate change. Therefore, the sensitivity coefficient is variable in a range of 0–0.125 N/(L/min).
-
(4)
The plate and shaft used for force measurement are supported by the air guide so that we can disregard the effect of the friction force.
Because the measurement values are read and recorded by a computer, the error from reading and recording is disregarded. Further detailed information on the above possible error sources are listed in Table 5. Next, we convert these individual errors to the standard uncertainty in newtons and calculate the combined standard uncertainty by squaring the individual uncertainties, adding them, and then taking the square root of the total. Finally, we multiplied the result by a coverage factor (=2) to obtain the expanded uncertainty [31, 32].
The uncertainty of the bearing force measurement is 6.24–10.54 mN. It is based on the standard uncertainty multiplied by the coverage factor of 2, providing a level of confidence of approximately 95 %. Based on the above analysis, we also know that large uncertainty would be expected where the stiffness is high, while the measured force value of the region around h = h i would have small uncertainty.
Rights and permissions
About this article
Cite this article
Li, X., Horie, M. & Kagawa, T. Study on the basic characteristics of a vortex bearing element. Int J Adv Manuf Technol 64, 1–12 (2013). https://doi.org/10.1007/s00170-012-4372-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-012-4372-0