
Abstract
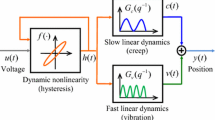
The adaptive identification of the non-linear hysteresis and creep effects in a piezoelectric actuator is proposed in this paper. Model uncertainties related to the hysteresis and creep effects, most prominently in the high frequency zone (to 100 Hz), large operating amplitude and/long operating time, can make a piezoelectric actuator-driven micro-positioning system unstable in the closed loop. Furthermore, these uncertainties may lead to inaccurate open-loop control and frequently cause harmonic distortion when a piezoelectric actuator is driven with a sinusoidal input voltage signal. In order to solve the above issues, it is important to determine an accurate non-linear dynamic model of a piezoelectric actuator. An unscented Kalman filter-based adaptive identification algorithm is presented, which accurately determines the non-linear dynamics of a piezoelectric stack type actuator such that the non-linear hysteresis and creep effects can be accurately predicted. Since hysteresis and creep are dominant in open loop, the actuator is driven in an open-loop mode in this investigation.
Similar content being viewed by others

References
Newcomb CV, Flinn I (1982) Improving the linearity of piezoelectric ceramic actuators. IEEE Electron Lett 18(11):442–442. doi:10.1049/el:19820301
Huang S, Tan K, Lee T (2002) Adaptive motion control using neural network approximations. Automatica 38(2):227–233. doi:10.1016/S0005-1098(01)00192-3
Jan C, Hwang C (2000) Robust control design for a piezoelectric actuator system with dominant hysteresis. IEEE Int Conf Ind Electron Instrum 3:1515–1520
Goldfarb M, Celanovic N (1997) A lumped parameter electromechanical model for describing the nonlinear behaviour of piezoelectric actuators. J Dyn Syst Meas Control 119:478–485. doi:10.1115/1.2801282
Mayhan P, Srinivasan K, Watechagit S, Washington G (2000) Dynamic modelling and controller design for a piezoelectric actuation system used for machine tool control. J Intell Mater Syst Struct 11(10):771–780
Handley D, Lu T-F, Yong YK, Eales C (2004) Workspace investigation of a 3DOF compliant micro-motion stage. The 8th International Conference on Control, Automation, Robotics and Vision, ICARCV
Stroscio J, Kaiser W (1993) Scanning tunneling microscopy. Academic, San Diego
Palazzolo A, Jagannathan S, Kascak A, Montague G, Kiraly L (1993) Hybrid active vibration control of rotor bearing systems using piezoelectric actuators. J Vib Acoust 115:111–119. doi:10.1115/1.2930303
Okazaki Y (1990) A micro positioning tool post using a piezoelectric actuator for diamond turning machines. Precis Eng 12(3):151–156. doi:10.1016/0141-6359(90)90087-F
Yong YK, Lu T-F, Minase JL (2006) Trajectory following with a three-DOF micro-motion stage. Australasian Conference on Robotics and Automation, ACRA, December 6–8, Auckland, New Zealand
Huang L, Tiersten H (1998) An analytical description of slow hysteresis in polarized ferroelectric ceramic actuators. J Intell Mater Syst Struct 9:417–426
Arafa M, Baz A (2004) On the nonlinear behaviour of piezoelectric actuator. J Vib Control 10(3):387–398. doi:10.1177/1077546304033365
Ge P, Jouaneh M (1995) Modelling hysteresis in piezoceramic actuators. Precis Eng 17(3):211–221. doi:10.1016/0141-6359(95)00002-U
Minase J, Lu T, Wornle F (2007) State estimation of non-linear piezoelectric stack actuator hysteresis model. Proc SPIE Int Soc Opt Eng 6414:1–10
Adriaens H, De Koning W, Banning R (2000) Modelling piezoelectric actuators. IEEE/ASME Trans Mechatron 5(4):331–341. doi:10.1109/3516.891044
Tokin (2000) Multilayer piezoelectric actuators (product guide), 1 (1)
Ru C, Sun L (2005) Hysteresis and creep compensation for piezoelectric actuator in open-loop operation. Sens Actuators A 122(1):124–130. doi:10.1016/j.sna.2005.03.056
Fett T, Thun G (1998) Determination of room-temperature tensile creep of PZT. J Mater Sci Lett 17:1929–1931. doi:10.1023/A:1006608509876
Barrett R, Quate C (1991) Optical scan-correction system applied to atomic force microscopy. Rev Sci Instrum 62(6):1393–1399. doi:10.1063/1.1142506
Mayergoyz I (1986) Mathematical models of hysteresis. Phys Rev Lett 56:1518–1521. doi:10.1103/PhysRevLett.56.1518
Krasnosekl'skii M, Pokrovskii A (1983) Systems with hysteresis. Nauka, Moscow
Tong Z, Sui S, Du C (2006) A novel neural network model of hysteresis nonlinearities. Proceedings of the 6th International Conference on Intelligent Systems Design and Applications, 84–89
Kalman R (1965) A new approach to linear filtering and prediction problems. J Basic Eng Ser D 82:35–45
Julier S, Uhlmann J (1997) A new extension of the Kalman filters to nonlinear systems. In Proceedings of Aerosense: The 11th International Symposium on Aerospace/Defence Sensing, Simulation and Controls, pp 182–193
Wan E, Merve R (2001) Chapter 7: Unscented Kalman filter. Kalman filtering and neural networks. Wiley, New York
Julier S, Uhlmann J (1996) A general method for approximating non-linear transformations of probability distributions. Technical Report, Robotics Research Group, Department of Engineering Science, University of Oxford
Tse S, Gao Y (2007) Modelling of piezoelectric actuator based nano positioning system using multi polynomial regression with CI continuity. Key Eng Mater 339:434–441. doi:10.4028/www.scientific.net/KEM.339.434
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Minase, J., Lu, TF., Cazzolato, B. et al. Adaptive identification of hysteresis and creep in piezoelectric stack actuators. Int J Adv Manuf Technol 46, 913–921 (2010). https://doi.org/10.1007/s00170-009-2033-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-009-2033-8