
Abstract
The behavior of third gradient materials is analyzed. They possess stress tensor fields of second, third and fourth order. Starting from the principle of virtual power, we derive the admissible boundary conditions. Those on free surfaces can only be obtained by the application of the divergence theorem of surfaces. On the other hand, such an application to fictitious internal cuts makes no sense although it is usually practiced. We prove that some of the boundary conditions on a free surface may be interpreted as the equilibrium conditions of a shell. So a crust shell exists on such a surface and a beam exists where patches of the surface meet. On the other hand, no such shells or beams can be found with fictitious surfaces in the interior of a continuum. Our finding does not depend on any specific constitutive assumption.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
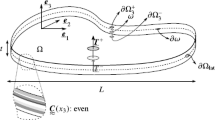
During the last two centuries, the theory of materials of continuum mechanics was to a large extent a synonym of the theory of simple materials [1, 2]. It implies the existence of the Cauchy stress tensor field \({\mathbf{T}}\) within a body. The action on internal surfaces as well as on boundary surfaces is described by the stress vector \({\mathbf{T}}\cdot {\mathbf{n}}\), where \({{\mathbf{n}}}\) denotes the local unit normal vector. It acts as a reaction where kinematical boundary conditions are given and can be prescribed at a free surface. No distinction has to be made between a real boundary surface and the fictitious surface around any subbody.
In the last decades, however, theories of materials with higher gradients received an increasing attention ([5,6,7,8,9] among many others). Their properties are extensively elaborated in a compendium by Bertram [10]. A comprehensive presentation is also given in [11]. Extensive lists of references can be found there and in [12].
Gradient materials imply the existence of stress tensor fields of several orders. We will demonstrate that this property requires a distinction between fictitious cuts in the interior of a continuum and the real boundaries of a body. We prove that there exist a crust shell at free surfaces and edge beams where patches of the surface meet. They contain the typical cutting loads of shells and beams. This seems to have been overlooked so far. Shells and beams with such cutting loads can, of course, not be found on fictitious surfaces within a continuum.
We start from the principle of virtual power and derive the admissible boundary conditions. In the ensuing sections, we recall the basic facts of the theories of shells and beams and show that some of these boundary conditions are nothing but the equilibrium conditions of a shell or a beam.
Notation A dot denotes a contraction. Multiple contractions are written \(\mathbf{a}\otimes \mathbf{b}:\mathbf{e}\otimes \mathbf{f}=\mathbf{a}\cdot \mathbf{e}\,\mathbf{b}\cdot \mathbf{f}\), \(\mathbf{a}\otimes \mathbf{b}\otimes \mathbf{c}:\! \cdot \;\mathbf{e}\otimes \mathbf{f}\otimes \mathbf{g}=\mathbf{a}\cdot \mathbf{e}\,\mathbf{b}\cdot \mathbf{f}\,\mathbf{c}\cdot \mathbf{g}\), \(\mathbf{a}\otimes \mathbf{b}\otimes \mathbf{c}\otimes \mathbf{d}::\mathbf{e}\otimes \mathbf{f}\otimes \mathbf{g}\otimes \mathbf{h}=\mathbf{a}\cdot \mathbf{e}\,\mathbf{b}\cdot \mathbf{f}\,\mathbf{c}\cdot \mathbf{g}\,\mathbf{d}\cdot \mathbf{h}\). We define the vector of a tensor by \(\mathbf{a}\otimes \mathbf{b}|_{\times }=\mathbf{a}\times \mathbf{b}=-\,2\,\mathrm{axi}\,(\mathbf{a}\otimes \mathbf{b})\) and extend this definition to \(\mathbf{a}\otimes \mathbf{b}\otimes \mathbf{c}|_{\times }=\mathbf{a}\times \mathbf{b}\otimes \mathbf{c}\). The transpose of a tensor shall be defined by \(\mathbf{a}\otimes \mathbf{b}^T=\mathbf{b}\otimes \mathbf{a}\) and \(\mathbf{a}\otimes \mathbf{b}\otimes \mathbf{c}^T=\mathbf{b}\otimes \mathbf{a}\otimes \mathbf{c}\).
We will sometimes note the dimension of a quantity. The dimension of force is written [F] and that of length [L].
Definitions We will use a lot of abbreviations in order to reveal the physical content of our formulae. Here we note the numbers of the equations where the definitions of various vectors and tensors can be found.
2 Boundary conditions derived from the principle of virtual power
We discuss materials with up to third gradients. Such materials have been studied, e.g., in [13,14,15].
The (internal) virtual power per unit volume within a body is a linear expression of the first, second, and third gradient of the virtual velocity field.
We identify a second-order stress tensor \({{\mathbf{T}}}\) (dimension [F/L\(^2\)]), a third-order stress tensor \(\mathsf T\) ([FL/L\(^2\)]), and a fourth-order stress tensor \(\mathcal T\) ( [FL\(^2\)/L\(^2\)]). \({{\mathbf{T}}}\) is symmetric due to the principle of invariance under superimposed rigid body motions, while \(\mathsf T\) and \(\mathcal T\) enjoy the same symmetries in the last entries as their conjugate virtual velocity gradients.
The (internal) virtual power of a whole body or of a subbody can be reformulated by multiple application of the divergence theorem with \({{\mathbf{n}}}\) the outer unit normal of the surface
We introduced the effective stress tensors
Let us first consider a subbody cut from some real body under consideration. We observe that the normal components \({\mathcal {T}}\cdot {\mathbf{n}}\) , \(\bar{\mathsf{T}}\cdot {\mathbf{n}}\), and \(\bar{\mathbf{T}}\cdot {\mathbf{n}}\) of the effective stress tensors are transmitted over the cut surfaces. The last contribution is the only one present with simple materials and reduces to the Cauchy stress vector \({\mathbf{T}}\cdot {\mathbf{n}}\). It is important to notice the following facts:
-
Each of the three contributions only depends on the local orientation of the surface and not on its curvature.
-
No additional contributions appear at edges or vertices of the boundary of the subbody if its surface is not smooth.
This finding is contrary to the usual opinion (accentuated e.g. in [16]), that is based on an inappropriate application of the divergence theorem on the boundary of subbodies. The physical content of such a proceeding is generally not realized. This will be detailed later.
Next we want to treat the real surfaces of the body. Therefore we split the spatial derivative into a tangential and a normal part
and obtain
with the local (symmetric) tensor of curvature
We define the following surface tensors
The first integrand of Eq. (2) becomes—if the symmetry of \({\mathcal {T}}\) is taken into account—
The second integrand becomes
After all, we arrive at
with the following dynamic quantities on the surface.
Now imagine an extremely thin layer at the surface. It is loaded from the interior of the body by these dynamic quantities, endowed with a negative sign. Of course, dynamic quantities of exactly the same kind may also be applied from the environment to the layer. Many of them are, however, overlooked until now. The virtual power of these external forces may be written as follows.
It has been supplemented by the contributions of the body force and inertial force within the body and by an additional contribution \(\delta \Pi _\mathrm{add}\) of line tractions and point forces that will be specified later.
The principle of virtual power, dating back to Lagrange, postulates the equality of the internal and external virtual power. So we arrive at the following statement
with the differences
This postulate selects those stress fields of order 2, 3, and 4, that are compatible with the prescribed external actions within the body and on the boundaries. Its evaluation with any virtual velocity field satisfying the kinematical boundary conditions provides the field equation and the dynamic boundary conditions. A unique solution can, of course, only be found, if the constitutive behavior is specified.
Since \(\delta \mathbf{v}\) is arbitrary within the body, we obtain the field equation
Moreover, we are now able to discuss the behavior on boundaries.
Firstly we consider the case that kinematic quantities are prescribed and dynamic quantities appear as reactions. Where the velocity \(\mathbf{v}\) (in case of a fluid or the displacement in case of a solid body) and hence \(\mathbf{v}\otimes \nabla _t\) and \(\mathbf{v}\otimes \nabla _t\otimes \nabla _t\) is given, the reactions are
Where \(\partial \delta \mathbf{v}/\partial n\) and hence \(\partial \delta \mathbf{v}/\partial n\otimes \nabla _t\) is given, the reactions are
Where \(\partial ^2\delta \mathbf{v}/\partial n^2\) is given, the reaction is \(\hat{\mathbf{t}}_\mathrm{ext} =\hat{\mathbf{t}}\).
Secondly we consider the case that kinematical quantities are free. If the field \(\partial ^2\delta \mathbf{v}/\partial n^2\) is arbitrary on a surface then the following boundary condition must hold.
The situation is more complicated where the surface field \(\delta \mathbf{v}\) or the surface field \(\partial \delta \mathbf{v}/\partial n\) is arbitrary. The apparent conclusions (3 boundary conditions: \(\mathbf{t}^{*}={\mathbf{0}}\), \(\mathbf{Z}^{*}={\mathbf{0}}\) , \(\mathsf{Y}^{*}={\mathbf{0}}\)) or (2 boundary conditions: \(\bar{\mathbf{t}}^{*}={\mathbf{0}}\), \(\bar{\mathbf{Z}}^{*}={\mathbf{0}}\)), respectively, are not applicable since the two fields determine also the fields of their tangential derivatives so that only one boundary condition remains in both cases.
This difficulty and the physical meaning of its solution is the main topic of the paper at hand. An analogous problem is well known with the free edges of plates and has been treated by Thomson and Tait 150 years ago.
The remedy is the divergence theorem of the surface. If a field \(\mathbf{a}\) satisfies \(\mathbf{a}\cdot {\mathbf{n}}\equiv 0\) on the whole surface then
We integrate over a smooth patch and introduce the outward unit normal vector \(\mathbf{e}\) of the patch in the tangential plane. So we obtain
and
with the abbreviations
and
If \(\delta \mathbf{v}\) is arbitrary on the surface, then we infer the boundary condition
This is an equilibrium condition of forces.
If \(\partial \delta \mathbf{v}/\partial n\) is arbitrary on the surface, then we infer the boundary condition
The component in the normal direction is a double force and works on the stretching \(\mathbf{n\cdot \partial \delta \mathbf{v}}/\partial n\). This leads to
The part within the tangential plane works on the angular velocity \(\varvec{\psi }={\mathbf{n}}\times \partial \delta \mathbf{v}/\partial n\).
This is an equilibrium condition of moments.
Equations (27) and (28) yield the following information: While the dimensions of \(\mathbf{t}\) and \(\bar{\mathbf{t}}\) are [F/L\(^2\)] and [FL/L\(^2\)], respectively, we infer [F/L] and [FL/L] as the dimensions of \(\mathbf{S}\) and \(\bar{\mathbf{S}}\). Now look at Eq. (26): Although it states the equality of the tensors \(\bar{\mathbf{S}}\) and \(-\bar{\mathbf{Z}}^{*}\), we have to notice the following distinction: \(\bar{\mathbf{Z}}^{*}\) denotes the difference of actions of dimension [FL\(^2\)] per unit area [L\(^2\)] from the outer and inner side of the surface layer whereas the tensor \(\bar{\mathbf{S}}\) describes an action of dimension [FL] per unit length [L] within the surface layer. A similar distinction has to be made with Eq. (25). The dimension of the right-hand side is [FL/L\(^2\)] while that of the left-hand side is [F/L].
Now let us consider an edge line where two patches are in contact. The contributions of the line integrals of Eqs. (23) and (24) have to be augmented by the power of an external line force vector \(\mathbf{g}_\mathrm{ext}\) of dimension [F/L] and a tensor \(\mathbf{G}_\mathrm{ext}\) of dimension [FL/L]. (This is part of the formerly announced additional power \(\delta \Pi _\mathrm{add}\)). If \(\delta \mathbf{v} \) and \( \delta \mathbf{v} \otimes \nabla \) are arbitrary on the edge line then we obtain the following contribution to the virtual power difference.
The sums are to be extended over the two adjacent patches. ( Indices are omitted.) The expression can be reformulated.
We introduce the unit tangent vector \(\mathbf{s}\) of the edge line and split the spatial derivative as follows.
Here \(\nabla _p \) is the derivative in the plane normal to \(\mathbf{s}\). Integration by parts over the arc length s yields
If \(\delta \mathbf{v}\) is arbitrary on the edge line then we obtain an equilibrium condition of forces.
If \(\delta \mathbf{v}\) is arbitrary at a vertex where several edge lines meet then we add an additional external power \(\delta \mathbf{v}\cdot \mathbf{g}_\mathrm{vertex} \) of a force \(\mathbf{g}_\mathrm{vertex}\) of dimension [F] and obtain an equilibrium condition of forces.
We decompose the factor with \(\delta \mathbf{v}\otimes \nabla _p\) into its symmetric and skew part. The symmetric part works on a stretching. If this is arbitrary then we obtain the boundary condition
The skew part works on a spin with the angular velocity \( \varvec{\psi }=-\delta \mathbf{v}\times \nabla _p/2\). If this is arbitrary then we obtain another boundary condition. It is equivalent to the postulate that the negative vector of the skew part vanishes and can be interpreted as an equilibrium condition of moments.
3 The crust shell
We recall the elementary facts of the theory of shells. A shell is a curved or plane surface endowed with mechanical properties. Given a cut normal to a unit vector \(\mathbf{e}\) we encounter a force per unit length \(\mathbf{f}\) [F/L] and a moment per unit length \(\mathbf{m}\) [FL/L]. We can modify the famous tetrahedron argument of Cauchy and find that the equilibrium of a small triangle requires the existence of a force tensor \(\mathbf{F}\) [F/L] and a moment tensor \(\mathbf{M}\) [FL/L] leading to
The equilibrium conditions of forces and moments of a smooth shell segment read
where \(\mathbf{r}\) is a position vector and \( \mathbf{f}_S \) [F/L\(^2]\) and \(\mathbf{m}_S\) [FL/L\(^2\)] are forces and moments per unit area, respectively. Now
The accent indicates on which field \(\nabla _t\) is to be applied. Because of
the equilibrium conditions become
This must be valid for arbitrary shell segments and implies the differential equations
We are now able to prove that some of the boundary conditions of a free surface of a gradient material are nothing else but the equilibrium conditions of the boundary layer which will therefore be called the crust shell.
A comparison of (45) with (27) reveals the force tensor of the crust shell
while the force per unit area is simply the difference of the forces of the outer and inner side of the shell.
Therefore
and
Inserting this into (46) gives
The tangential part of this vector equation can be compared with (30)—note (26)—
We identify the moment tensor
and the tangential part of the moment per unit area
The moment tensor will generally produce moment vectors not only in the tangential plane but also in the direction of \({{\mathbf{n}}}\) as can easily be seen.
The underlined term vanishes. Such moment vectors in the direction of \({{\mathbf{n}}}\) do not occur with the classical shells of the engineers.
Finally we check the equilibrium of moments around the axis \({{\mathbf{n}}}\). We need
where the underlined term vanishes again. The normal component of (51) becomes
and we have altogether
We see that the moment per unit area depends on four difference quantities in a manner that is not immediately evident.
After all, we have to discuss the condition (29) on the surface that can be written
The first two terms describe a double force (dimension [FL]) per unit area [L\(^2\)] while the vector field \({\mathbf{n}}\cdot \bar{\mathbf{Z}}^{*}\) describes a double force ([FL]) per unit length [L] and \({\mathbf{n}}\cdot \bar{\mathbf{Z}}^{*}\cdot \mathbf{e}\) constitutes an additional cutting quantity of the shell that does not enter the conditions of equilibrium. These fields are absent with classical shells.
4 The edge beam
We recall the elementary facts of the theory of beams. A beam is a curved or straight line endowed with mechanical properties. It is oriented and its unit tangent vector is called \(\mathbf{s}\). Given a cut with normal \(\mathbf{s}\) we encounter a force vector \(\mathbf{p}\) [F] and a moment vector \(\mathbf{q}\) [FL]. On the other side of the cut, the normal vector is \(-\mathbf{s}\) and we encounter \(-\mathbf{p}\) and \(-\mathbf{q}\). The equilibrium conditions of forces and moments of a segment of the beam read
and
where \(\mathbf{p}_L\) [F/L] and \(\mathbf{q}_L\) [FL/L] denote a force and a moment per unit length. Since
and \(\mathrm{d}{} \mathbf{r}/\mathrm{d}s = \mathbf{s}\), we arrive at
This must be valid for arbitrary beam segments and implies the differential equations
and
We are now able to prove that some of the edge line conditions of a gradient material are nothing else but the equilibrium conditions of a beam which will therefore be called the edge beam. A comparison of (65) with (35) together with (47) gives the cutting force and the force per unit length
and
The following identity will be needed.
We introduce this and (26) into (38) and obtain
This can be written
because of (53) and (67). We compare this with (66). No derivative with respect to s appears so that no moment is present in the beam.
The moment per unit length is seen to be
The expressions of the line force \(\mathbf{p}_L\) in (68) and the line moment \(\mathbf{q}_L\) in (73) are plausible. They result from the cutting forces and moments of the adjacent surface patches augmented by external line forces and line moments applied to the edge beam.
Finally, we have to discuss the condition (37). The dot product of the tangent vector \(\mathbf{s}\) with this tensor equation yields—note (26)—
while the vector product of \(\mathbf{s}\) with the condition (38) yields
The statements of the two equations are equivalent since \(2\,\mathbf{s}\cdot \mathrm{sym} [ \mathbf{G}_\mathrm{ext}\cdot (\mathbf{1}-\mathbf{s}\otimes \mathbf{s}) ] =-\mathbf{s}\times (\mathbf{G}_\mathrm{ext}\cdot (\mathbf{1}-\mathbf{s}\otimes \mathbf{s}))|_{\times }\). Therefore, if the equilibrium of moments (38) is satisfied, then also (74) is fulfilled and only the part of (37) in the plane normal to \(\mathbf{s}\) remains as an independent boundary condition.
Noting \(\mathbf{1}-\mathbf{s}\otimes \mathbf{s}=\mathbf{e}\otimes \mathbf{e}+{\mathbf{n}}\otimes {\mathbf{n}}\), we arrive at
This tensor equation is equivalent to three scalar equations that are not equilibrium conditions of the beam but describe the action of double forces.
5 Conclusions
We have seen that the free surface of a third gradient continuum has the properties of a crust shell with a force tensor \(\mathbf{F}\) and a moment tensor \(\mathbf{M}\), given in Eqs. (47) and (53). These tensors produce forces and moments per unit length in the surface. The detection of the crust shell was based on the application of the divergence theorem on the free surface, and this was necessary in order to obtain the boundary conditions on such a surface. We saw that part of these boundary conditions are equivalent to the equilibrium conditions of shells. Moreover, an edge beam is present where two patches of the surface meet and a cutting force \(\mathbf{p}\), given by Eq. (67), is identified in this beam but no cutting moment. The beam can be loaded by external forces and moments per unit length. If several beams meet at a vertex, then an external single force may be applied there but no couple. These external actions are not possible with simple materials, but their admissibility with gradient materials is well known ([7, 12]). The mechanical behavior of the crust shell and the edge beam, however, seem to have been concealed until now. But it is this finding that clarifies the cause why line loads and edge forces can be applied to a three-dimensional continuum and why they can only be applied on edges and vertices. They are accepted by a beam that is supported by shell segments on both sides. Finally the shell distributes the load into the body.
If we restrict our attention to second gradient materials then \({\mathcal {T}}\equiv {{\mathbf{0}}}\), \(\mathsf{Y}\equiv {{\mathbf{0}}}\), \(\bar{\mathbf{Z}}\equiv {{\mathbf{0}}}\). The crust shell possesses a force tensor which may be called a surface tension but no moment tensor, and the edge beam has no cutting force. A line force but no line moment may be applied on the beam, and no single force is possible at a vertex. The properties of a fluid of this kind have been discussed in [17].
The following fact is extremely important: The application of the divergence theorem on the free surface was indispensable in order to derive the boundary conditions. On the other hand, the application of the divergence theorem on any surface in the interior makes no sense. It would mean that a shell with its specific cutting forces and moments per unit length is created wherever we imagine a cut through the body. But there are, of course, no such shells inside a body. Only quantities per unit area can be found in the interior of a smooth continuum. This has often been overlooked, e.g. [16].
The situation at a fixed surface needs further attention. We detected the reaction quantities in Eqs. (19) and (20). The corresponding difference quantities with an asterisk vanish so that no crust shell is necessary. If the possibility of the reactions \(\mathbf{Z}_\mathrm{ext}\), \(\mathsf{Y}_\mathrm{ext}\), \(\bar{\mathbf{Z}}_\mathrm{ext}\) is not taken note of, however, then the existence of a crust shell is tacitly assumed. This may actually be the case if the environment is unable to provide such reactions, e.g. because it consists of a simple material.
The occurrence of a crust shell and an edge beam is the consequence of nothing else but the following two conditions.
-
The fact that the constitutive behavior of the continuum requires stress tensor fields of second, third, and fourth order.
-
The absence of kinematical constraints on the free surface.
No constitutive assumption concerning the properties of the surface entered the analysis.
References
Truesdell, C., Noll, W.: The Non-linear Field Theories of Mechanics. Handbuch der Physik III/3. Springer, Berlin (1965)
Krawietz, A.: Materialtheorie. Springer, Berlin (1986)
Toupin, R.: Elastic materials with couple-stresses. Arch. Rational Mech. Anal. 11(1), 385–414 (1962)
Germain, P.: The method of virtual power in the mechanics of continuous media, I: second gradient theory. Math. Mech. Complex Syst. 8(2), 153–190 (2020)
Trostel, R.: Gedanken zur Konstruktion mechanischer Theorien. In: Trostel, R. (ed.) Beiträge zu den Ingenieurwissenschaften, Universitätsbibliothek der Technischen Universität Berlin, pp. 96–134 (1985)
Fried, E., Gurtin, M.E.: Tractions, balances, and boundary conditions for nonsimple materials with application to liquid flow at small-length scales. Arch. Rational Mech. Anal. 182, 513–554 (2006)
Auffray, N., dell’Isola, F., Eremeyev, V.A., Madeo, A., Rosi, G.: Analytical continuum mechanics à la Hamilton-Piola least action principle for second gradient continua and capillary fluids. Math. Mech. Solids 20(4), 375–417 (2015)
dell’Isola, F., Della Corta, A., Giorgio, I.: Higher-gradient continua: the legacy of Piola, Mindlin, Sedov and Toupin and some future research perspectives. Math. Mech. Solids 22(4), 852–872 (2017)
Bertram, A., Forest, S. (eds.): Mechanics of Strain Gradient Materials. Springer, Berlin (2020)
Bertram, A.: Compendium on Gradient Materials, https://www.lkm.tu-berlin.de/fileadmin/fg49/publikationen/bertram/Compendium_on_Gradient_Materials_June_2019.pdf (2019)
Eremeyev, V.A., Cazzani, A., Dell’Isola, F.: On nonlinear dilatational strain gradient elasticity. Continuum Mech. Thermodyn. https://doi.org/10.1007/s00161-021-00993-6 (2021)
Reiher, J.C., Giorgio, I., Bertram, A.: Finite-element analysis of polyhedra under point and line forces in second-strain gradient elasticity. J. Eng. Mech. 5, 04016112 (2016)
Silber, G.: Eine Systematik nichtlokaler kelvinhafter Fluide vom Grade drei auf der Basis eines klassischen Kontinuumsmodelles. VDI Fortschrittsberichte, Reihe 18, Nr. 26 (1986)
Reiher, J.C., Bertram, A.: Finite third-order gradient elasticity and thermoelasticity. J. Elast. 133, 223–252 (2018). https://doi.org/10.1007/s10659-018-9677-2
Reiher, J.C., Bertram, A.: Finite third-order gradient elastoplasticity and thermoplasticity. J. Elast. 138(2), 169–193 (2020)
Dell’Isola, F., Seppecher, P., Madeo, A.: How contact interactions may depend on the shape of Cauchy cuts in N-th gradient continua: approach “à la D’Alembert’’. ZAMP 63(6), 1119–1141 (2012)
Krawietz, A.: Surface tension and reaction stresses of a linear incompressible second gradient fluid. Continuum Mech. Thermodyn. https://doi.org/10.1007/s00161-020-00951-8 (2021)
Acknowledgements
The author is grateful to have had the opportunity to attend lectures of Rudolf Trostel in 1961 where he demonstrated the usefulness of symbolic tensor notation and recommended the excellent text book of Max Lagally (“Vorlesungen über Vektorrechnung”) from 1928. Albrecht Bertram was kind enough to provide access to relevant literature during the lockdown.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Andreas Öchsner.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Krawietz, A. Surface phenomena of gradient materials. Continuum Mech. Thermodyn. 33, 2203–2212 (2021). https://doi.org/10.1007/s00161-021-01022-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00161-021-01022-2