
Abstract
Topology optimization is a technique to solve the material distribution problem. However, to consider manufacturing constraints within this technique can be challenging. A type of manufacturing constraint that has not been thoroughly addressed is the ability to optimally select among a set of design subdomains. Examples of situations that may require such constraint in their design process are: the design and optimal location of a bridge pier, and the design and location of an outrigger system for a high-rise building, to name a few. This paper presents a novel formulation to address the simultaneous optimal subdomain selection and topology design problem which is based on the well-known SIMP formulation. The proposed method optimally selects the design subdomains in (2D and 3D) structures, and topology optimizes these with the remainder of the design domain which does not belong to any subdomain.














Similar content being viewed by others

Notes
Solid Isotropic Material with Penalization.
Evolutionary Structural Optimization and Bi-directional Evolutionary Structural Optimization.
Topology optimization with self-weight has a tendency to exhibit numerical issues which fall outside the scope of the present work.
An asymmetric building footprint will cause the center of mass and the center of stiffness to be relatively far from each other. This results in an accidental torsion on the building when subjected to a transverse seismic acceleration.
It is quite common for the roof to have a different live load. Moreover, the roof live load has different characteristics (e.g. live load reduction criteria) which reinforce the idea of treating it separately by means of a different variable called \(L_r\).
For the sake of simplicity, no superimposed dead load (SDL) or cladding load was considered in this example.
Abbreviations
- \(E^{{(i)}}\) :
-
Elastic modulus of the i-th element
- \(E_{min}\) :
-
Elastic modulus associated with Ersatz material
- \(E_{0}\) :
-
Elastic modulus of the solid phase
- \(\textbf{f}_i\) :
-
Nodal force vector of the i-th load case
- \(f_0\) :
-
Volume fraction of complete domain
- \(f_1\) :
-
Volume fraction of complete domain minus subdomains
- \(f_2\) :
-
Volume fraction of subdomains
- \(\textbf{H}\) :
-
Filter matrix
- \(J_i\) :
-
Objective function of the i-th load case
- \(\textbf{K}_0^{(i)}\) :
-
Stiffness matrix of the i-th element using \(E=1\)
- \(\textbf{K}\) :
-
Global stiffness matrix
- \(N_\text {dof}\) :
-
Number of degrees of freedom
- N :
-
Number of elements in the complete domain
- \(N_s\) :
-
Number of selectable subdomains
- \(N_0\) :
-
Maximum number of design subdomains
- \(N_1\) :
-
Number of elements in the complete domain minus the subdomains
- \(N_2\) :
-
Number of elements in subdomains
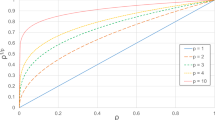
- p :
-
Density penalization parameter
- q :
-
Subdomain penalization parameter
- \(r_{min}\) :
-
Filter size
- \(\textbf{u}_i\) :
-
Nodal displacement vector of the i-th load case
- \(v_0\) :
-
Volume of complete domain
- \(v_1\) :
-
Volume of complete domain minus the subdomains
- \(v_2\) :
-
Volume of subdomains
- \(\textbf{x}\) :
-
Vector of the N element-wise design variables
- \(\alpha _i\) :
-
Relative sensitivity of i-th load case
- \(\beta\) :
-
P-norm constant
- \(\varepsilon\) :
-
Relaxation parameter
- \(\varvec{\lambda }\) :
-
Adjoint vector
- \(\varvec{\mu }\) :
-
Vector of \(N_s\) subdomains design variables
- \(\varvec{\rho }\) :
-
Vector of the N element-wise densities
References
ACI Committee 318: Building Code Requirements for Structural Concrete (ACI 318-19): An ACI Standard; Commentary on Building Code Requirements for Structural Concrete (ACI 318R-19). American Concrete Institute (2019)
Allaire G, Jouve F, Toader A (2004) Structural optimization using sensitivity analysis and a level-set method. J Comput Phys 194(1):363–393. https://doi.org/10.1016/j.jcp.2003.09.032
Almeida SRM, Paulino GH, Silva ECN (2010) Layout and material gradation in topology optimization of functionally graded structures: a global-local approach. Struct Multidisc Optim 42(6):855–868. https://doi.org/10.1007/s00158-010-0514-x
Andreassen E, Clausen A, Schevenels M, Lazarov BS, Sigmund O (2011) Efficient topology optimization in MATLAB using 88 lines of code. Struct Multidisc Optim 43(1):1–16. https://doi.org/10.1007/s00158-010-0594-7
ASCE: (ASCE 7-22) Minimum design loads and associated criteria for buildings and other structures. American Society of Civil Engineers (ASCE) (2022)
Bendsøe MP (1989) Optimal shape design as a material distribution problem. Struct Optim 1(4):193–202. https://doi.org/10.1021/jm1000584
Bendsøe MP, Kikuchi N (1988) Generating optimal topologies in structural design using a homogenization method. Comput Methods Appl Mech Eng 71(2):197–224. https://doi.org/10.1016/0045-7825(88)90086-2
Bendsøe MP, Sigmund O (2003) Topology optimization: theory, methods and applications, 2 edn. Engineering Online Library. Springer, Berlin
Bourdin B (2001) Filters in topology optimization. Int J Num Methods Eng 50(9):2143–2158
Bruns TE, Tortorelli DA (1998) Topology optimization of geometrically nonlinear structures and compliant mechanisms. In: \(7^\text{ th }\) AIAA/USAF/NASA/ISSMO Symposium on Multidisciplinary Analysis and Optimization, pp. 1874–1882. https://doi.org/10.2514/6.1998-4950
Choi HS, Ho G, Joseph L, Mathias N (2017) Outrigger design for high-rise buildings, 2nd edn. Council on Tall Buildings and Urban Habitat (CTBUH), Chicago
Christensen P, Klarbring A (2009) An introduction to structural optimization. Springer, Berlin
Craig RR, Kurdila AJ (2006) Fundamentals of structural dynamics, 2nd edn. Wiley, Hoboken
Díaz A, Sigmund O (1995) Checkerboard patterns in layout optimization. Struct Optim 10(1):40–45
Ferreira AJM, Fantuzzi N (2020) MATLAB Codes for finite element analysis, 2nd edn. Springer, Cham
Fu J, Huang J, Liu J (2019) Topology optimization with selective problem setups. IEEE Access 7:180846–180855. https://doi.org/10.1109/ACCESS.2019.2958645
Gain AL, Paulino GH (2012) Phase-field based topology optimization with polygonal elements: a finite volume approach for the evolution equation. Struct Multidisc Optim 46(3):327–342. https://doi.org/10.1007/s00158-012-0781-9
Guest JK, Zhu, M (2012) Casting and milling restrictions in topology optimization via projection-based algorithms. In: \(38^\text{ th }\) Design Automation Conference, vol. 3, Parts A and B, pp. 913–920 https://doi.org/10.1115/DETC2012-71507
Huang J, Qin Q, Wang J (2020) A review of stereolithography: processes and systems. Processes. https://doi.org/10.3390/PR8091138
Huang X, Xie YM (2007) Convergent and mesh-independent solutions for the bi-directional evolutionary structural optimization method. Finite Elem Anal Des 43(14):1039–1049. https://doi.org/10.1016/j.finel.2007.06.006
International Organization for Standardization (2009) ISO 4354:2009(E) Wind actions on structures. Geneva
Jog CS, Haber RB (1996) Stability of finite element models for distributed-parameter optimization and topology design. Comput Methods Appl Mech Eng 130(3–4):203–226. https://doi.org/10.1016/0045-7825(95)00928-0
Kumar S (2003) Selective laser sintering: a qualitative and objective approach. Jom 55(10):43–47. https://doi.org/10.1007/s11837-003-0175-y
Leary M, Babaee M, Brandt M, Subic A (2013) Feasible build orientations for self-supporting fused deposition manufacture: a novel approach to space-filling tesselated geometries. Adv Mater Res 633:148–168. https://doi.org/10.4028/www.scientific.net/AMR.633.148
Leary M, Merli L, Torti F, Mazur M, Brandt M (2014) Optimal topology for additive manufacture: a method for enabling additive manufacture of support-free optimal structures. Mater Des 63:678–690. https://doi.org/10.1016/j.matdes.2014.06.015
Melchels FP, Feijen J, Grijpma DW (2010) A review on stereolithography and its applications in biomedical engineering. Biomaterials 31(24):6121–6130. https://doi.org/10.1016/j.biomaterials.2010.04.050
Mlejnek HP (1992) Some aspects of the genesis of structures. Struct Optim 5:64–69. https://doi.org/10.1007/BF01744697
Oñate E (2013) Structural analysis with the finite element method. Volume 2: Beams, Plates and Shells. Springer Dordrecht, Barcelona
Petersson J (1999) A finite element analysis of optimal variable thickness sheets. SIAM J Num Anal 36(6):1759–1778. https://doi.org/10.1137/S0036142996313968
Sigmund O (2001) A 99 line topology optimization code written in matlab. Struct Multidisc Optim 21(2):120–127. https://doi.org/10.1007/s001580050176
Sigmund O (2007) Morphology-based black and white filters for topology optimization. Struct Multidisc Optim 33(4–5):401–424. https://doi.org/10.1007/s00158-006-0087-x
Sigmund O, Maute K (2013) Topology optimization approaches. Struct Multidisc Optim 48:1031–1055. https://doi.org/10.1007/s00158-013-0978-6
Stolpe M, Svanberg K (2001) On the trajectories of the epsilon-relaxation approach for stress-constrained truss topology optimization. Struct Multidisc Optim 21:140–151. https://doi.org/10.1007/s001580050178
Stromberg LL, Beghini A, Baker WF, Paulino GH (2011) Application of layout and topology optimization using pattern gradation for the conceptual design of buildings. Struct Multidisc Optim 43(2):165–180. https://doi.org/10.1007/s00158-010-0563-1
Stromberg LL, Beghini A, Baker WF, Paulino GH (2012) Topology optimization for braced frames: combining continuum and beam/column elements. Eng Struct 37:106–124. https://doi.org/10.1016/j.engstruct.2011.12.034
Suzuki K, Kikuchi N (1991) A homogenization method for shape and topology optimization. Comput Methods Appl Mech Eng 93(3):291–318. https://doi.org/10.1016/0045-7825(91)90245-2
Svanberg K (1987) The method of moving asymptotes - a new method for structural optimization. Int J Num Methods Eng 24(2):359–373. https://doi.org/10.1002/nme.1620240207
Tang PS, Chang KH (2001) Integration of topology and shape optimization for design of structural components. Struct Multidisc Optim 22(1):65–82. https://doi.org/10.1007/PL00013282
Taranath BS (2016) Tall building design: steel, concrete, and composite systems. CRC Press, Boca Raton
Tortorelli DA, Michaleris P (1994) Design sensitivity analysis: overview and review. Inverse Probl Eng 1(1):71–105. https://doi.org/10.1080/174159794088027573
Vatanabe SL, Lippi TN, Lima CR, Paulino GH, Silva EC (2016) Topology optimization with manufacturing constraints: a unified projection-based approach. Adv Eng Softw 100:97–112. https://doi.org/10.1016/j.advengsoft.2016.07.002
Wang MY, Wang X, Guo D (2003) A level set method for structural topology optimization. Comput Methods Appl Mech Eng 192(1–2):227–246
Wang MY, Zhou S (2004) Phase field: a variational method for structural topology optimization. CMES - Comput Model Eng Sci 6(6):547–566
Xie YM, Steven GP (1997) Evolutionary structural optimization. Springer, London
Zegard T, Baker WF, Mazurek A, Paulino GH (2014) Geometrical aspects of lateral bracing systems: where should the optimal bracing point be? J Struct Eng 140(9):04014063. https://doi.org/10.1061/(ASCE)ST.1943-541X.0000956
Zegard T, Paulino GH (2016) Bridging topology optimization and additive manufacturing. Struct Multidisc Optim 53(1):175–192. https://doi.org/10.1007/s00158-015-1274-4
Zhou M, Rozvany G (1991) The COC algorithm, part II: topological, geometrical and generalized shape optimization. Comput Methods Appl Mech Eng 89:309–336. https://doi.org/10.1016/0045-7825(91)90046-9
Zhu M, Yang Y, Guest JK, Shields MD (2017) Topology optimization for linear stationary stochastic dynamics: applications to frame structures. Struct Saf 67:116–131. https://doi.org/10.1016/j.strusafe.2017.04.004
Acknowledgements
The authors would like to thank Dr. Arek Mazurek for his insightful comments on an earlier version of this work. The authors also are very grateful of the comments, ideas, and feedback given by Diego Salinas throughout the entire development of this work.
Funding
Nothing to declare.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Replication of results
The numerical results presented in this document can be replicated using the methodology and formulations described here. The problem data and results used in the examples are available upon request to the authors.
Additional information
Responsible Editor: Emilio Carlos Nelli Silva
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix
A. High-rise building with outriggers: load calculation
This section describes the loading used in the high-rise building with outriggers example. The dead (D) and live (L) loads are assumed to be design-independent by ignoring the self-weight of the outrigger. The wind load (W) does depend on the global dynamic properties of the structure. Nonetheless, the variation of the load with the design is relatively low. Because of this, the algorithm is shown to successfully converge to a solution recalculating the wind load at iterations where a relatively significant variation of the design has occurred (or assumed to have occurred). The following subsections provide details in the calculation of each of these loads.
2.1 A.1 Dead and live loads
The dead (D) load depends directly on the materials, whereas the live (L) load is dependant on the building use. The material used for the core and slabs is reinforced concrete, which has a self-weight of \(\gamma _c=24.5\;\text {kN}/\text {m}^3\). Also, the building is meant to be an office building with a live load equal to \(L=2.4\;\text {kN}/\text {m}^2\), and with a roof live load of \(L_r = 0.96\; \text {kN}/\text {m}^2\) in accordance with the recommendations of ASCE7-22 (ASCE 2022). These loads are applied directly on the quadrilateral (finite) elements of the slab. Figure 16b illustrates how the gravitational loads are applied on the structural model.
2.2 A.2 Wind load
The wind load is applied on the exterior nodes of the slabs. The wind load acts as a pressure load on the exterior envelope of the building, which is distributed to the slab edges by the cladding system.
The velocity pressure evaluated at height z above ground \((q_z)\) using Equation 26.10-1.SI from ASCE7-22 (ASCE 2022), which is reproduced here:
The value of the topographic factor \(K_{zt}\) was taken as \(K_{zt}=1\). The directionality factor \(K_d\) was taken as \(K_d=0.85\) for buildings where the wind is applied on the main wind force resisting system (MWFRS). The ground elevation factor \(K_e\) was taken as \(K_e=1\). The exposure for the building was taken as a “category B”. Finally, the basic wind speed V was taken as \(V=40\;\text {m}/\text {s}\), which is associated to the 50-year MRI (annual probability of 0.02).
The design wind pressures p acting the MWFRS also requires the values of the gust-effect factor G, the external pressure coefficient \(C_p\) and the internal pressure coefficient \(GCP_i\). To determine the value of the gust-effect factor, we need to know the natural frequency of the building. This is obtained using the (global) stiffness matrix \(\textbf{K}\) and the mass matrix \(\textbf{M}\) of the structure. The stiffness matrix is already calculated at each optimization iteration. The mass matrix was not required in the previous examples, yet it only needs to be calculated once if the outrigger is assumed not to contribute towards a design-dependent load (self-weight). The mass matrix is defined as the seismic weight of the structure, which is taken as \(D + 0.25L\), where the dead and live loads are calculated in accordance to Section B1. In the event that the design domain self-weight is considered, this will only result in an additional computation time since the mass matrix needs to be recalculated at every iteration.
The mass matrix used in this example corresponds to the mass matrix of a flat S4 shell element: a superposition of a Q4D4 (membrane with drilling degrees of freedom) and a P4 (plate) element. The interpolation scheme used in a Q8 element (parent of a Q4D4) is:
The mass matrix \(\textbf{M}_{Q8}\) of the Q8 element is known to be:
To obtain the mass matrix of a Q4D4 element, we use the transformation matrix \(\textbf{T}_\text {Q4D4}\) on \(\textbf{M}_\text {Q8}\):
On the other hand, the interpolation scheme of a P4 element is Ferreira and Fantuzzi (2020):
, where \(\textbf{N}_w\) corresponds to the shape functions for the transverse displacement w of the plate, and \(\textbf{N}_{\theta _x}\) and \(\textbf{N}_{\theta _y}\) correspond to the shape functions for the rotations \(\theta _x\) and \(\theta _y\), respectively. The mass matrix \(\textbf{M}_\text {P4}\) can be calculated as:
where t is the thickness of the plate and \(\frac{t^3}{12}\) is the rotary inertia. We then assemble the mass matrix \(\textbf{M}_\text {S4}^\text {(local)}\) using both mass matrices \(\textbf{M}_\text {Q4D4}\) and \(\textbf{M}_\text {P4}\) and adding their contributions on the corresponding degree-of-freedom. Finally, a transformation is required to change from the local (flattened) coordinate systems into the structure’s global coordinate system:
The \(\textbf{M}\) matrix of the building has to also consider the contribution of the columns. The mass matrix of columns corresponds to that of an Euler-Bernoulli beam (Craig and Kurdila 2006). This global mass matrix \(\textbf{M}\) has associated mass for all degrees of freedom of the structure. To solve the eigenvalue problem towards obtaining the natural frequency of the building, we need to obtain \(\textbf{M}\) and \(\textbf{K}\) associated with the unsupported (free) degrees of freedom.
Once the building’s natural frequency \(n_1\) is known, we can define wether the structure is rigid \(\left( n_1\ge 1\right)\) or flexible \(\left( n_1< 1\right)\). If the structure is rigid, the value of the gust effect constant G is calculated following Section 26.11.4 of ASCE7-22 (ASCE 2022), whereas if it is flexible Section 26.11.5 is followed instead. If the structure is flexible, its damping ratio is also necessary to calculate the wind load. Since the structure is made of composite material, the damping ratio (\(\zeta\)) used in this case is \(\zeta =0.015\) ( International Organization for Standardization 2009). The value of the internal pressure coefficient is taken from Table 26.13-1 in ASCE7-22 (ASCE 2022), where for a completely enclosed building a value of \(GC_{pi}=\pm 0.18\) is taken. The sign depends on the face of the building in which the wind pressure is being calculated. Finally, the values of external pressure coefficient are taken from Figure 27.3-1 in ASCE7-22 (ASCE 2022), which also depends on the slenderness of the building in the direction of the wind. When the wind acts in the \(\hat{\textbf{x}}\) direction the slenderness is 1.5, resulting in \(C_p=0.8\) for the windward wall and \(C_p=0.4\) for the leeward wall. On the other hand, for the wind acting in the \(\hat{\textbf{y}}\) direction the slenderness is 0.67, so for the windward wall \(C_p=0.8\) and for the leeward wall \(C_p=0.5\). With these parameters, the design wind pressure p for the MWFRS of the building is calculated using Equation 27.3-1 in ASCE7-22 (ASCE 2022), which is reproduced here:
The value of q for windward walls is \(q_z\), while for leeward walls is \(q_h\), which is the velocity pressure evaluated at height \(z=h\), where h is the mean roof height of the building.
The wind load, as mentioned before, is applied directly on the perimeter nodes of each slab. The resulting force is obtained assuming the cladding is simply supported between two consecutive slabs. This results in a slightly higher contribution towards to top slab which is most significant near the ground level; because the wind profile varies more near the ground. This process is repeated for every story height and direction in which the wind force is applied. The wind pressure p is applied over the building envelope following cases 1 and 3 of Figure 27.3-8 in ASCE7-22 (ASCE 2022). These load cases are here illustrated in Fig. 15a and b for completeness.

Design wind load cases according to ASCE7-22: a design load case 1; and b design load case 3
A floor-plan view of the tower can be seen in Fig. 16a, with section cuts A-A and B-B also shown in Fig. 16b and c, respectively. These section cuts also illustrate how all loads, gravitational and wind loads, are applied on the structure.

High-rise building with outriggers: a typical floor-plan; b section along A–A illustrating the application of the gravity and wind loads along the \(\hat{\textbf{x}}\) direction.; and c section along B–B illustrating the application of the gravity and wind loads along the \(\hat{\textbf{y}}\) direction
The fundamental natural frequency of the building is calculated using Ritz vectors. For this calculation, we use the natural vibration modes as the corresponding Ritz vectors, both, for the \(\hat{\textbf{x}}\) and \(\hat{\textbf{y}}\) directions. Since the matrix \(\textbf{K}\) changes with every iteration, the fundamental natural frequency of the structure also changes. Therefore, the wind loads in the \(\hat{\textbf{x}}\) and \(\hat{\textbf{y}}\) directions should be recalculated in every iteration. That said, the variations on this frequency variation is relatively small and decreasing as the solution converges (iterations advance). Because of this, the natural frequency, and therefore the wind load, is only recalculated at iterations following a Fibonacci sequence (i.e. iterations 1, 2, 3, 5, 8, 13...). This captures the rapid variations on the topology at the initial iterations, while saving computations towards the end, but still ensuring an accurate calculation of the wind load throughout the optimization process.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Suau, M., Zegard, T. Topology optimization with optimal design subdomain selection. Struct Multidisc Optim 66, 246 (2023). https://doi.org/10.1007/s00158-023-03696-5
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00158-023-03696-5