
Abstract
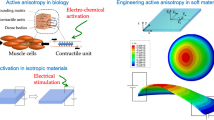
With recent advances in both responsive materials and fabrication techniques, it is now possible to construct integrated functional structures, composed of both structural and active materials. We investigate the robust design of such structures through topology optimization. By applying a typical interpolation scheme and filtering technique, we prove existence of an optimal design to a class of objective functions which depend on the compliances of the stimulated and unstimulated states. In particular, we consider the actuation work and the blocking load as objectives, both of which may be written in terms of compliances. We study numerical results for the design of a 2D rectangular lifting actuator for both of these objectives, and discuss some intuition behind the features of the converged designs. We formulate the optimal design of these integrated responsive structures with the introduction of voids or holes in the domain, and show that our existence result holds in this setting. We again consider the design of the 2D lifting actuator now with voids. Finally, we investigate the optimal design of an integrated 3D torsional actuator for maximum blocking torque.







Similar content being viewed by others
Notes
Precisely, it is bounded by a constant that depends on \(\rho _{min}\) and becomes unbounded as \(\rho _{min} \rightarrow 0\)
References
Allaire G (2002) Shape optimization by the homogenization method. Springer, New York
Allaire G, Aubry S (1999) On optimal microstructures for a plane shape optimization problem. Struct Optim 17:86–94
Allaire G, Bogosel B (2018) Optimizing supports for additive manufacturing. Struct Multidisc Optim 58(6):2493–2515
Allaire G, Bonnetier É, Francfort G, Jouve F (1997) Shape optimization by the homogenization method. Numer Math 76:27–68
Allaire G, Jouve F, Michailidis G (2016) Variational analysis and aerospace engineering, volume 116 of Springer optimization and its applications book series, chapter molding direction constraints in structural optimization via a level-set method. Springer, Berlin, pp 1–39
Allaire G, Dapogny C, Estevez R, Faure A, Michailidis G (2017a) Structural optimization under overhang constraints imposed by additive manufacturing technologies. J Comput Phys 351:295–328
Allaire G, Dapogny C, Faure A, Michailidis G (2017b) Shape optimization of a layer by layer mechanical constraint for additive manufacturing. C R Math 355(6):699–717
Ambrosio L, Buttazzo G (1993) An optimal design problem with perimeter penalization. Calc Var Partial Differ Equ 1:55–69
Ambulo CP, Burroughs JJ, Boothby JM, Kim H, Shankar MR, Ware TH (2017) Four-dimensional printing of liquid crystal elastomers. ACS Appl Mater Interfaces 9:37332–37339
Bangerth W, Hartmann R, Kanschat G (2007) deal.I —a general purpose object oriented finite element library. ACM Trans Math Softw 33(4):24/1–24/27
Bendsøe M, Sigmund O (1999) Material interpolation schemes in topology optimization. Arch Appl Mech 69:635–654
Bendsøe M, Sigmund O (2003) Topology optimization: theory, methods and applications, 2nd edn. Springer, Berlin
Bhattacharya K (2003) Microstructure of martensite: how it forms and how it gives rise to the shape-memory effect. Oxford University Press, Oxford
Bourdin B (2001) Filters in topology optimization. Int J Numer Methods Eng 50:2143–2158
Bourdin B, Chambolle A (2003) Design-dependent loads in topology optimization. ESAIM Control Optimd Calc Var 9:19–48
Bourdin B, Kohn RV (2008) Optimization of structural topology in the high-porosity regime. J Mech Phys Solids 56:1043–1064
Cesana P, De Simone A (2011) Quasiconvex envelopes of energies for nematic elastomers in the small strain regime and applications. J Mech Phys Solids 59:787–803
Cherkaev A (2000) Variational methods for structural optimization. Springer, New York
Elahinia M, Moghaddam NS, Andani MT, Amerinatanzi A, Bimber BA, Hamilton RF (2016) Fabrication of NiTi through additive manufacturing: a review. Prog Mater Sci 83:630–663
Francfort GA, Murat F (1986) Homogenization and optimal bounds in linear elasticity. Arch Ration Mech Anal 94:307–334
Geoffroy-Donders P, Allaire G, Michailidis G, Pantz O (2020) Coupled optimization of macroscopic structures and lattice infill. Int J Numer Methods Eng 61:2253–2269
Haber R, Jog C, Bendsøe M (1996) A new approach to variable-topology shape design using a constraint on the perimeter. Struct Optim 11:1–12
Kotikian A, Truby RL, Boley JW, White TJ, Lewis JA (2018) 3D printing of liquid crystal elastomeric actuators with spatially programed nematic order. Adv Mater 30:1706164
Lazarov BS, Sigmund O (2011) Filters in topology optimization based on Helmholtz-type differential equations. Int J Numer Methods Eng 86(6):765–781
Milton GW (1986) Homogenization and effective moduli of materials and media, volume 1 of the IMA volumes in mathematics and its applications. Chapter Modelling the properties of composite by laminates. Springer, Berlin, pp 150–174
Milton GW (2002) The theory of composite. Cambridge University Press, Cambridge
Nematollahi M, Toker G, Saghaian SE, Salazar J, Mahtabi M, Benafan O, Karaca H, Elahinia M (2019) Additive manufacturing of Ni-Rich NiTiHf20: manufacturability, composition, density, and transformation behavior. Shape Mem Superelast 5:113–124
Panetta J, Zhou Q, Malomo L, Pietroni N, Cignoni P, Zorin D (2015) Elastic textures for additive fabrication. ACM Trans Gr 34:1–12
Park S, Yoo J (2012) Structural optimization of a multi-physics problem considering thermal and magnetic effects. IEEE Trans Magn 48(11):3883–3886
Phillips BT, Becker KP, Kuruyama S, Galloway KC, Whittredge G, Vogt DM, Clark BT, Rosen MH, Pieribone VA, Gruber DF, Wood RJ (2018) A dexterous, glove-based teleoperable low-power soft robotic arm for delicate deep-sea biological exploration. Sci Rep 8:14779
Qian X (2017) Undercut and overhang angle control in topology optimization: a density gradient based integral approach. Int J Numer Methods Eng 111(3):247–272
Rodrigue H, Wei W, Bhandari B, Ahn S-H (2015) Fabrication of wrist-like SMA-based actuator by double smart soft composite casting. Smart Mater Struct 24:125003
Rodrigues H, Fernandes P (1995) A material based model for topology optimization of thermoelastic structures. Int J Numer Methods Eng 38(12):1951–1965
Rosental T, Magdassi S (2019) A new approach to 3D printing dense ceramics by ceramic precursor binders. Adv Eng Mater 21:1900604
Ruiz D, Sigmund O (2018) Optimal design of robust piezoelectric microgrippers undergoing large displacements. Struct Multidisc Optim 57(1):71–82
Schumacher C, Bickel B, Rys J, Marschner S, Daraio C, Gross M (2015) Microstructures to control elasticity in 3D printing. ACM Trans Gr 34:136:1-136:13
Sigmund O (1997) On the design of compliant mechanisms using topology optimization. Mech Struct Mach 25:495–526
Sigmund O (1998) Systematic design of microactuators using topology optimization. In: Varadan VK, McWhorter PJ, Singer RA, Vellekoop MJ (eds) Smart structures and materials 1998: smart electronics and MEMS, vol 3328. International Society for Optics and Photonics, SPIE, Bellingham pp 23–31
Sigmund O (2001a) Design of multiphysics actuators using topology optimization—part i: one-material structures. Comput Methods Appl Mech Eng 190(49):6577–6604
Sigmund O (2001b) Design of multiphysics actuators using topology optimization—part ii: two-material structures. Comput Methods Appl Mech Eng 190(49):6605–6627
Svanberg K (1987) The method of moving asymptotes–a new method for structural optimization. Int J Numer Methods Eng 24(2):359–373
Tabrizi M, Ware TH, Shankar MR (2019) Voxelated molecular patterning in three-dimensional freeforms. ACS Appl Mater Interfaces 11:28236
Wang Y, Kang Z (2017) Structural shape and topology optimization of cast parts using level set method. Int J Numer Methods Eng 111(13):1252–1273
Yoon GH (2012) Topological layout design of electro-fluid-thermal-compliant actuator. Comput Methods Appl Mech Eng 209–212:28–44
York PA, Wood RJ (2019) Nitinol living hinges for millimeter-sized robots and medical devices. In: International Conference on Robotics and Automation, pp 889–893
Acknowledgements
We are grateful for the financial support of the U.S. National Science Foundation through “Collaborative Research: Optimal Design of Responsive Materials and Structures” (DMS:2009289 at Caltech and DMS:2009303 at LSU and McMaster University). Part of this work was performed while BB was the A.K. & Shirley Barton Professor of Mathematics at Louisiana State University (USA).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no financial or personal relationship with a third party whose interests could be positively or negatively influenced by the article’s content.
Replication of results
The authors are willing to share the code on request. The data for the figures are available through GitHub (https://github.com/akers049/responsive_structure_data).
Additional information
Responsible Editor: Ole Sigmund
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1: A proof of Lemma 3.2
Here, we provide the proof of Lemma 3.2.
Proof
We will first show by compactness that there exists a \(u^{\infty } \in \mathcal {U}\) such that \(u_k \rightharpoonup u^{\infty }\) in \(W^{1,2}(\Omega )\). Then, we will show that we must have \(u^{\infty } = \bar{u}\).
Since \(u_k\) is the equillibrium solution corresponding to \(\phi _k\) for some fixed S, it satisfies
and for any \(\tilde{u} \in \mathcal {U}\), we have
Furthermore,
where M is some constant, independent of k. So,
Now, expanding the energy functional
and using the ellipticity from Remark 1
for some constants \(m,c > 0\), independent of k. Additionally,
for some constant \(a > 0\). Then,
for some constant \(b > 0\), where \(d > 0\) is a constant independent of k. Thus, \(u_k\) is a bounded sequence in \(W^{1,2}(\Omega )\), and there exists a \(u^\infty \in \mathcal {U}\) such that
up to a subsequence. Next, consider \(\bar{u} \in \mathcal {U}\) such that
Then
Similarly,
or
Then taking limits, and using the strong convergence of the convolution gives
The convexity of the energy integrand in \(\nabla u\) and u for a given \(\phi\) and S gives lower semi-continuity of our energy function
so
Then from (75),
From the uniqueness of the minimizer of \(\mathcal {E}_f(\bar{\phi }, \times , S)\) we have
Then, as desired,
\(\square\)
Appendix 2: Workpiece objective as force in spring
Here we show the workpiece objective is equivalent to maximizing the load of a point spring. This is equivalent to the objective used by Sigmund in an earlier work to study thermal actuators (Sigmund 1998). However, we include the derivation here for completeness. Consider a linear spring in direction \(\hat{n}\) of spring constant \(\kappa > 0\) connected to the boundary of the domain at some point of interest \(x_0 \in \partial _f \Omega\). The aim is to maximize the load carried by this spring upon actuation. Thus, we look to maximize the load in the spring:
where u is the equilibrium solution corresponding to \(S = 1\) and \(f = f_0 \delta (x - x_0) \hat{n}\). Assuming homogeneous Dirichlet conditions \(u_0 = 0\) on \(\partial _u \Omega\), it is easy to see using the linearity of the Euler-Lagrange equations
where \(u_{S = 0, f_0 \hat{n}}\) minimizes the elastic energy (4) with \(S = 0\) and \(f = f_0 \delta (x - x_0) \hat{n}\). Invoking linearity again gives \(u_{S = 0, f_0 \hat{n}} = f_0 u_{S = 0, \hat{n}}\). The displacement can then be written as
Evaluating at \(x = x_0\), taking an inner product with \(\hat{n}\), and using the constraint that \(f_0 = - \kappa u(x_0) \cdot \hat{n}\) gives
Rearranging gives
or
We recognize \(u_{S = 0, \hat{n}}(x_0) \cdot \hat{n}\) and \(u_{S = 1, \hat{n}}(x_0) \cdot \hat{n}\) as the unactuated and actuated compliances under loading \(f = \delta (x - x_0) \hat{n}\). Thus, the workpiece objective can then be written as a function of compliancies,
Rights and permissions
About this article

Cite this article
Akerson, A., Bourdin, B. & Bhattacharya, K. Optimal design of responsive structures. Struct Multidisc Optim 65, 111 (2022). https://doi.org/10.1007/s00158-022-03200-5
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00158-022-03200-5