
Abstract
The general scaling underlying the asymptotic derivation of 2D theory for thin shells from the original equations of motion in 3D elasticity fails for cylindrical shells due to the cancellation of the leading-order terms in the geometric relations for the mid-surface deformations corresponding to shear and circumferential extension. As a consequence, a cylindrical shell as an elastic waveguide supports a small cut-off frequency for each circumferential mode. The value of this cut-off tends to zero at the thin shell limit. In this case, the near-cut-off behaviour is strongly affected by the presence of two small parameters associated with the relative thickness and wavenumber. It is not obvious whether it can be treated within the 2D theory. For the first time, a novel special scaling is introduced, in order to derive an asymptotically consistent formulation for a cylindrical shell starting from 3D framework. Comparisons with the previous results obtained using the popular 2D Sanders–Koiter shell theory are made. Asymptotic corrections are deduced for the fourth-order equation of low-frequency motion and some of other relations, including the formulae for tangential shear stress resultants.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The static behaviour of a thin cylindrical shell exhibits remarkable features arising from virtually negligible shear and circumferential extension of its mid-surface. This is especially important for sufficiently long shells, for which the simplest membrane model fails, and some of the moments (stress couples) have to be retained in the equilibrium equations. The associated semi-membrane (semi-momentless) formulation was initially developed in Ref. [1] using an ad hoc engineering approach. Later, it was asymptotically justified within the framework of 2D classical shell theory, see [2]. The semi-membrane theory for cylindrical shells is also mentioned in more recent books, e.g. see [3, 4].
The aforementioned geometric constraints also support the family of lowest cut-off frequencies, e.g. see [5, 6] with their values tending to zero at the thin shell limit. In this case, the near-cut-off behaviour is very peculiar also because of the presence of two small parameters. The first of them is the ratio of the shell thickness and its mid-surface radius, while the second one is given by the ratio of the latter and a typical wavelength. The associated shortened equations of motion are derived in Ref. [6] using a straightforward asymptotic procedure in the framework of the Sanders–Koiter version of 2D shell theory. Earlier, similar ad hoc equations were established in [7], see also [8, 9], inspired by modelling of elongated carbon nanotubes, e.g. see [10, 11]. The results in Ref. [6] were extended to an anisotropic cylindrical shell in Ref. [12], see also [13] dealing with a functionally graded material.
Previously, near-cut-off asymptotic analysis of elastic shells was focussed on the high-frequency domain with the cut-off frequencies corresponding to thickness resonances, e.g. see books [14, 15] and journal publications [16, 17]. We also mention related publications studying high-frequency trapped modes, e.g. see [18, 19]. In contrast to the current context, the effect of the ratio of the radius and wavelength is not that sophisticated for high-frequency near-cut-off behaviour.
Asymptotic validation of the considerations in [6] starting from the 3D set-up seems to be of an obvious interest. The point is that the general asymptotic scaling underlying dynamic behaviour of a shell of arbitrary shape, see [14] and references therein, degenerates for a thin cylinder due to specific constraints on a part of mid-surface deformations. As might be expected, the related cancellation of leading-order terms is especially pronounced near the smallest cut-off frequencies. In the latter case, higher-order terms retained in [6] within the 2D framework may hypothetically be negligible in comparison with the truncation in the equations of motion in 3D elasticity. This motivates the derivation of the low-frequency equations for a cylindrical shell from the original 3D formulation.
Below, we start from the scaling generalising that in [6] to the 3D case, since, as it was already mentioned, the previous considerations for an arbitrary shell cannot be adapted. The developed asymptotic procedure appears to be very technical. For the sake of simplicity, we study only the scenario, in which the ratios of the thickness to the radius and the radius to a typical wavelength are of the same order. Nevertheless, the derivation of a leading-order shortened equation necessitates operating with four-term expansions of 3D equations.
It is surprising, in a sense, that most of the coefficients in the established low-frequency equation are identical to their counterpart in [6]. The exception is the essential correction to the leading-order estimation for the cut-off frequency, which, however, coincides with that obtained in [20, 21] from the related plane strain problem. At the same time, the leading-order expressions for the mid-surface circumferential extension and the tangential shear stress resultants are different from those in [6], whereas the tangential normal stress resultants and mid-plane shear deformation are the same.
The paper is organised as follows. The statement of the problem in terms of 3D elasticity is presented in Sect. 2. A single circumferential mode is studied. The asymptotic scaling is determined in Sect. 3. Special arrangements are made to incorporate the generation of the deformations corresponding to mid-surface shear and circumferential extension. The leading-order estimation for the lowest cut-off frequency is obtained in Sect. 4. Section 5 completes the derivation of the sought-for equation of motion. Section 6 is concerned with comparisons of the established results with previous developments, including the coefficients in the above-mentioned equation, as well as the asymptotic formulae for stress resultants and mid-surface deformations.
2 Statement of the problem
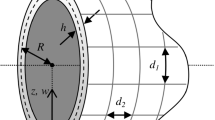
Consider free harmonic vibrations of a thin elastic cylindrical shell of thickness 2h with the mid-surface radius R for which \( \eta = h/R \) is a small geometrical parameter, i.e. \( h \ll R \), see Fig. 1. Take the traditional three orthogonal coordinates along the mid-surface \( \alpha _i\), \( i=1,2,3\), in the form
where \( \xi \) is the longitudinal coordinate (\( -\infty< \xi < \infty \)), \( \theta \) is the circumferential coordinate (\( 0 \le \theta < 2 \pi \)), and \( \zeta \) is the transverse coordinate (\( -1 \le \zeta \le 1 \)). Also, define the dimensionless frequency by
where \( \omega \) is the original frequency, \( \rho \) is the mass density, E is the Young’s modulus and \( \nu \) is the Poisson’s ratio; in what follows, the factor \( e^{i \omega t} \), where t is time, is omitted.

A thin elastic shell
The first formula (1) defines a typical wavelength L of order \( R^2/h \) which is much greater not only than the shell thickness (\( h/L \sim \eta ^2 \ll 1 \) ) but also than the shell radius ( \( R/L \sim \eta \ll 1 \)). Assuming, in addition, \( \Omega \sim 1 \) we restrict ourselves to the lowest vibration modes investigated in [6] within the framework of 2D shell theory.
Let us present the 3D displacement and stress components \( v_i (\xi , \theta , \zeta ) \) and \( \sigma _{ij}(\xi , \theta , \zeta )\) (\(i,j=1,2,3\)) as
and
where \( u_i(\xi ,\zeta ) \), \( \sigma _{ij}(\xi ,\zeta ) \) denote unknown Fourier coefficients and n is the circumferential wavenumber.
Then, equations of motion in 3D elasticity, see, e.g. [14], become
and
together with
where
We also impose homogeneous boundary conditions at traction free faces, i.e.
The aim of the paper is to reduce the equations above to a 1D form over the long-wave, low-frequency domain defined in this section.
3 Scaling of stresses and displacements
Let us introduce the dimensionless displacement and stress components in the form
and
In addition, we set
reflecting the specific behaviour of a cylindrical shell related to its asymptotically small circumferential extension and tangential shear, see [2] for greater detail.
In the formulae above, all starred quantities are assumed to be of order unity. The adapted scaling is motivated by the asymptotic consideration in [6] within the framework of Sanders–Koiter version of 2D classical shell theory.
Inserting the scaled stress and displacement components given by formulae (15) and (16) into Eqs. (5)–(12), we obtain
with
We also have from (13)
In addition, boundary conditions (14) take the form
Now, we expand all the starred stress and displacement components, as well as the deformations in (27), in asymptotic series as
taking into account that \( (1 + \eta \zeta )^{-1} = 1 - \eta \zeta + \eta ^2 \zeta ^2 + \cdots \). In this case, we also have for the dimensionless frequency
corresponding to a near-cut-off expansion around the frequency value \( \Omega \approx \Omega _0 \), earlier adapted within the 2D set-up in [21] and many others.
4 Cut-off frequency
First, at leading order, integrating Eqs. (24), (25) and (23) with respect to thickness variable \(\zeta \), we obtain, respectively,
where \(U^{(0)}\), \(V^{(0)}\) and \(W^{(0)}\) are unknown 1D functions. On account of (27), the latter are related to each other by
from which we also deduce that
Next, integrating Eq. (19) across the thickness, we have
Thus, as it follows from the boundary condition (28) at \( \zeta = -1 \), we have
demonstrating that normal circumferential stress resultant disappears at leading order. As a result, the associated stress couple appears to be more significant. This observation nicely illustrates the basic idea of the semi-membrane shell theory, see [2]
We also have from (20)
The relations above do not allow calculating the leading-order term \( \Omega _0^2 \) in the asymptotic series (30). This necessitates proceeding to the next order approximation.
We now integrate Eqs. (24), (25) and (23) with respect to \( \zeta \) at first order, yielding, respectively
In this case, the relations (27) give
and
Then, we integrate (22) through the thickness, using (38) along with (35), we first obtain
and, hence
Similarly,
Equations (34) and (36), due to (41), become
and
Now, insert (26) with (27)\(_2\) in (18). The solvability of the latter, taking into account homogeneous boundary conditions (28), yields
and, consequently
Integrating, again, (18) with respect to \(\zeta \), and satisfying (28), we finally get
In the same manner, we derive from (19) and (20) together with (28), respectively,
and
As a result, the solvabilities of (19) and (20) with (28) are given by
and
On comparing the latter, we arrive at
At a given n, this is the expression of the lowest cut-off frequency within the classical 2D shell theory, e.g. see [5] and [6] along with the related plane strain set-up in Fig.2. For \( n=0\) and \( n=1 \), we have \( \Omega _0^2= 0\). In this case, the assumptions underlying the asymptotic consideration above are violated. These two modes correspond to the so-called bar (or beam)-type vibration of a cylindrical shell and assume a special treatment.

Cross section of the shell
Although we determined the frequency, we do not yet have the sought-for equation of motion. Therefore, we should proceed to higher orders.
5 Near-cut-off equation of motion
At second order, we have from (24), (25) and (23), respectively,
We also get from (27)
and
Now, integrating (22) with respect to \(\zeta \) over the interval \( -1 \le \zeta \le 1 \) and considering (38), (44), (51) and (54), we obtain
Then, inserting (56) back into (22), we derive
Similarly, (21) becomes
Hence, we obtain from (48) and (49), respectively,
and
This time, the solvability condition for (18), expressed through formulae above, takes the form
whereas (26) results in
Next, integrating (19) and (20) across the thickness and satisfying boundary conditions (28) at \( \zeta = 1 \) we obtain, respectively,
and
The last two equations taken at \( \zeta = -1 \), due to boundary conditions (28), reduce to
and
Therefore,
i.e. there is no first-order correction to the lowest cut-off frequency which is in agreement with [6, 21].
Thus, we need to proceed to the next asymptotic order. First, integrating Eqs. (24), (25) and (23) with respect to \(\zeta \), we obtain
and
Also,
and
Then, integrating (22) and incorporating (66), we have
Next, inserting the latter back into (22), we arrive at
Now, substituting (73) into (63) and (64), we get
and
At this order, the solvability of (19) together with the boundary conditions (28) is given by
Similarly, for (20) and (28) we have
Comparison of the last two formulae leads to
Finally, on using the relations (30), (32) and (56) in the last equation, we arrive at
6 Discussion
Introducing \( W = R W^{(0)} \) and setting \( \omega ^2 W = - \partial ^2 W/ \partial t^2 \), the last equation in the previous section may be rewritten in the original variables as
where
with
and \( \Omega _0^2 \) is given by (52). The graph of the coefficients given by (52), (81) and (82) versus Poisson’s ratio \( \nu \) is displayed in Figs. 3 and 4 for \( n=2, 3, 4 \).

Coefficients \( \gamma \) and \( \delta \) given by (81) versus the Poisson’s ratio \( \nu \) for \(n= 2, 3, 4 \)

The solutions of Eq. (80) can be substituted into the formulae in the previous two sections in order to derive the expressions for stress and strain components. As an example, we present the asymptotic estimations for the quantities e and s, see (13), at the mid-surface \( \zeta = 0\). We stress once more that these quantities are key ones for a cylindrical shell. Starting from formulae (56) and (61), along with other intermediate relations, we readily deduce, at leading order,
and
We also present the expressions for the tangential stress resultants in terms of W. These become
where \( i \ne j = 1,2 \). Let us set, according to (29)
First, insert the latter into the first formula in (85) taking into consideration (41), (42) and (57), (58), together with (32), we obtain at leading order
and
Similarly, substituting equations (46) and (62) into the second equation in (85), we arrive at the following leading-order expressions:
and
Let us compare now the formulae above in this section with the predictions of the 2D Sanders–Koiter theory in [6]. First of all, we note that all coefficients in the equation of motion (80), apart from the correction to the cut-off frequency \( \Omega _2^2 \) given by (82), which is denoted in [6] by \( \Omega _1^2\), see formula (3.6) there, are identical to those arising from the Sanders–Koiter theory. At the same time, the value \( \Omega _2^2 \) in (82) is the same as in the plane strain problem studied in [21] and also [20].
For the quantities e and s, we proceed with the refined formulae (5.1) and (5.2) derived in [6] for mid-surface displacements. In terms of the notation of the current paper, they can be written as
and
These relations are similar but not identical to formulae (56) and (61). First, insert (91) into (13) to have
where only the term with the second-order derivative coincides with its counterpart in (84). However, the last term in the right-hand side of this formula is identical to that in [21]. Next, using (91) and (92) in (13) we arrive at formula (84).
Now, substitute (91) and (92) into the traditional expressions for tangential stress resultants in 2D shell theory, e.g. see [2, 5], given by
and
where e and s are given by (93) and (84), respectively. As a result, the formulae for \( F_i \) are identical to (87) and (88) in spite of the deviation between the expressions for mid-plane circumferential extension e given by (83) and (93). At the same time, the last two formulae for the tangential shear stress resultants \( Q_{ij} \) coincide with (89) and (90) only with respect to the coefficients at the highest-order derivatives taking the form
and
It is worth noting that the deviation between two above-mentioned sets of formulae occurs despite the same expression for the tangential shear s given by (84). This happens due to the presence of the \( \zeta ^2 \) term in (62), see also (85) and (86). Thus, the coincidence of the tangential shear deformations along the mid-surface does not guarantee asymptotic correct expressions for the tangential shear stress resultants calculated from the classical 2D shell theory.
7 Concluding Remarks
Apart from \( \Omega _2^2 \) given (82), all other coefficients in the fourth-order equation (80) coincide with their counterparts in the Sanders–Koiter shell theory, see [6]. At the same time, for the cancellation of the leading-order terms in the formulae for the mid-surface circumferential extension, the refined expression obtained in [6] is not identical to that derived in this paper; cf. (83) and (93). Similarly, the relations for the tangential shear stress resultants are also different; cf. (89)–(90) and (98)–(99). The last observation implies, in particular, that the boundary conditions at the free edge of an elongated cylindrical shell generally cannot be treated within the existing 2D shell theory.
The derivations in the paper are based on the assumption that the ratio of the shell thickness to its radius is of the same order as that of the radius to a typical wavelength. It might be expected, see also the dispersion analysis in [6], that the established asymptotic formulation is also valid over a broader parameter range. In the latter case, the terms with fourth and second derivatives in equation (80) may not be of the same asymptotic order. Moreover, for this scenario, in which the term with a second derivative dominates, the number of boundary conditions is less than that usually adapted for a cylindrical shell. In fact, analysis of a near-cut-off behaviour starting from approximate models may often involve a revisit of the original problems, e.g. the related 3D dynamic problem in elasticity within the current context.
The circumferential modes with \( n=0 \) and \( n=1 \) are not considered in the paper. They correspond to vibrations of a bar with zero cut-off frequencies. In particular, the mode with \( n=1 \) is concerned with bending of a thin-walled beam, e.g. see [2] for greater detail. The higher-order modes (\( n \gg 1\)) also are not explicitly mentioned. The related generalisation is not expected to be particularly sophisticated, e.g. see [5].
References
Vlasov, V.Z.: Krucheniye i ustoychivost tonkostennykh otkrytykh profiley (Torsion and stability of thin-walled opened profile cross-section). Stroit. Prom. 6, 49–53 (1938)
Goldenveizer, A.L.: Theory of Elastic Thin Shells. Herrmann, Mineola (1976)
Calladine, C.R.: Theory of Shell Structures. Cambridge University Press, Cambridge (1989)
Blaauwendraad, J., Hoefakker, J.H.: Structural Shell Analysis: Understanding and Application. Springer Science & Business Media, New York (2013)
Kaplunov, J.D., Kossovich, L.Y., Wilde, M.V.: Free localized vibrations of a semi-infinite cylindrical shell. J. Acoust. Soc. Am. 107(3), 1383–1393 (2000)
Kaplunov, J., Manevitch, L.I., Smirnov, V.V.: Vibrations of an elastic cylindrical shell near the lowest cut-off frequency. Proc. R. Soc. A. 472, 20150753 (2016)
Strozzi, M., Manevitch, L.I., Pellicano, F., Smirnov, V.V., Shepelev, D.S.: Low-frequency linear vibrations of single-walled carbon nanotubes: analytical and numerical models. J. Sound Vib. 333, 2936–2957 (2014). https://doi.org/10.1016/j.jsv.2014.01.016
Smirnov, V.V., Manevitch, L.I., Strozzi, M., Pellicano, F.: Nonlinear optical vibrations of single-walled carbon nanotubes. 1. Energy exchange and localization of low-frequency oscillations. Phys. D Nonlinear Phenom. 325, 113–125 (2016)
Strozzi, M., Pellicano, F.: Linear vibrations of triple-walled carbon nanotubes. Math. Mech. Solids 23(11), 1456–1481 (2018)
Rafiee, R., Moghadam, R.M.: On the modeling of carbon nanotubes: a critical review. Compos. B Eng. 56, 435–449 (2014)
Silvestre, N., Wang, C.M., Zhang, Y.Y., Xiang, Y.: Sanders shell model for buckling of single-walled carbon nanotubes with small aspect ratio. Compos. Struct. 93(7), 1683–1691 (2011)
Kaplunov, J., Nobili, A.A.: robust approach for analysing dispersion of elastic waves in an orthotropic cylindrical shell. J. Sound Vib. 401, 23–35 (2017)
Ege, N., Erbaş, B., Kaplunov, J., Noori, N.: Low-frequency vibrations of a thin-walled functionally graded cylinder (plane strain problem). Mech. Adv. Mater. Struct., 1–9 (2022)
Kaplunov, J.D., Kossovitch, L.Y., Nolde, E.V.: Dynamics of Thin Walled Elastic Bodies. Academic Press, London (1998)
Le, K.C.: Vibrations of Shells and Rods. Springer, Heidelberg (2012)
Kaplunov, J.D.: Long-wave vibrations of a thinwalled body with fixed faces. Q. J. Mech. Appl. 48(3), 311–327 (1995)
Le Khanh, C.: High frequency vibrations and wave propagation in elastic shells: variational-asymptotic approach. Int. J. Solids Struct. 34(30), 3923–3939 (1997)
Gridin, D., Craster, R.V., Adamou, A.T.: Trapped modes in curved elastic plates. Proc. Math. Phys. Eng. Sci. 461(2056), 1181–1197 (2005)
Tovstik, P.E.: Free high-frequency vibrations of anisotropic plates of variable thickness. J. Appl. Math. Mech. 56(3), 390–395 (1992)
Chapman, C.J., Sorokin, S.V.: The deferred limit method for long waves in a curved waveguide. Proc. R. Soc. A. 473, 20160900 (2017)
Ege, N., Erbaş, B., Kaplunov, J.: Asymptotic derivation of refined dynamic equations for a thin elastic annulus. Math. Mech. Solids 26, 118–132 (2021)
Acknowledgements
The work of JK has been supported by Consejo Nacional de Ciencia y Tecnología (Mexico) CF-2019 No. 304005.
Author information
Authors and Affiliations
Corresponding author
Additional information
This paper is dedicated to the memory of late Professor Leonid Manevitch (1938–2020).
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was completed with the support of our TeX-pert.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ege, N., Erbaş, B., Kaplunov, J. et al. Asymptotic corrections to the low-frequency theory for a cylindrical elastic shell. Z. Angew. Math. Phys. 74, 43 (2023). https://doi.org/10.1007/s00033-022-01933-3
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00033-022-01933-3