
Abstract
In this paper we study some curves of a trans-Sasakian manifold that generalize magnetic curves.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
It is a well-known fact that a charged particle in a static uniform magnetic field in Euclidean space \(\mathbb R^3\) moves along a circular helix (i.e., a curve of constant curvature and torsion) around the line flow of the magnetic field. If B is a magnetic field, and v(t) is the velocity of a charged particle, with charge q, the Lorentz force is \(\mathcal {F}=qv(t)\times B(t)\). The Newton equation describes the motion of the particle: \(m\dot{v}(t)=qv(t)\times B(t)\).
This situation is generalized to Riemannian manifolds (M, g). There a closed 2-form \(\mathcal {F}\) is called a magnetic field, since it can be regarded as a generalization of a static magnetic field. The Lorentz force \(\phi \) is the 1-form associated to \(\mathcal {F}\) by g: \(\mathcal {F}(X,Y)=g(\phi X,Y)\). A curve \(\gamma \) that describes the trajectory of a charged particle is called a magnetic curve, and it is given by the Lorentz equation (also Newton equation)
where \(\nabla \) is the Levi Civita connection, and q is a constant called the strength. And it is called normal magnetic curve if the curve is arc-lenght parameterized.
In [1] Adachi proved that in a Kaehler manifold constant multiples of the Kaehler form define natural uniform magnetic fields, and studied the corresponding trajectories. Also Cabrerizo et al. [6], studied magnetic curves in contact metric manifolds. More precisely, if \((M^{2n+1},\varphi ,\xi ,\eta ,g)\) is a contact metric manifold, the fundamental 2-form of the almost contact metric structure is the 2-form \(\mathcal {F}\) given by \(\mathcal {F}(X, Y ) = g(\varphi X,Y)\). It satisfies \(\mathcal {F}=d\eta \), so it is a closed form, and it can be considered as a magnetic field. Magnetic curves in a three dimensional contact manifold are geodesic or slant curves which make a constant angle with the structure vector field \(\xi \).
Ates and Munteanu studied curves with \(\nabla _TT=q JT\) for certain constant q in \(R\times S^3\), [4]. As the ambient space is not Kaehler, the corresponding 2-form is not closed; therefore they called them J-trajectories, avoiding the name magnetic. Magnetic curves of Sasakian manifolds of arbitrary dimension were studied in [8]. Also in [13], curves satisfying \(\nabla _TT=q\varphi T\) in \(R^{2n+1}\) with a quasi-Sasakian structure were studied and called magnetic trajectories. It has also been studied the cases of cosymplectic [9] and Kenmotsu manifolds [11, 19]. More recently the problem has been traslated to s-manifolds, [10], and to semi-Riemannian geometry, [18]. However, as long as we know, if the 2-form is not closed, there is no physical interpretation.
In [5], Bejan and Druta-Romaniuc considered a triple \((M,F,\nabla )\), a manifold, a (1, 1)-tensor field and a linear connection. They said that a smooth curve \(\gamma \) on M is a F-geodesic if
Using another parameter, this equation turns to
for some functions a(t), b(t).
Curves satisfying this last equation are called F-planar curves in [15]. It implies that the parallel transport of the tangent vector field belongs to \(span\{T,FT\}\). Let us notice that the curve is not parametrized with unit speed. It is particularly interesting the case of a Kaehler manifold (M, J, g), and \(F=J\); in this case curves are called J-planar curves.
In the present paper, for an almost contact manifold \((M,\phi ,\xi ,\eta ,g)\), we introduce a new type of curves satisfying the similar equation
with \(\gamma \) unit speed parametrized and both p, q constants. They generalize both geodesic and magnetic curves, and they could be considered F-geodesic with \(FX=q\varphi X+p(\xi -\eta (X)X).\)
The paper is organized as follows: after a Preliminaries section, we motivate this definition. In Sect. 4, we study these curves in a trans-Sasakian manifold, and some examples in three dimensional manifolds are given. In Sect. 5 we give a general construction for curves in a \(\beta \)-Kenmotsu manifold. In the last section we focus on the cosymplectic case proving that these curves are of osculating order three. During the whole paper we relate our results to the ones known for magnetic curves.
No much is known about curves in proper three dimensional trans-Sasakian manifolds, neither for slant nor magnetic curves. Actually, the complete classification of p, q-curves in that environment remains as an open problem.
2 Preliminaries
An odd-dimensional Riemannian manifold (M, g) is said to be an almost contact metric manifold if there exist on M a (1, 1) tensor field \(\varphi \), a vector field \(\xi \) (called the structure vector field) and a 1-form \(\eta \) such that \(\eta (\xi )=1\), \(\varphi ^{2}(X)=-X+\eta (X)\xi \) and \(g(\varphi X,\varphi Y)=g(X,Y)-\eta (X)\eta (Y)\), for any vector fields X, Y on M. In particular, in an almost contact metric manifold we also have \(\varphi \xi =0\) and \( \eta \circ \varphi =0\).
Such a manifold is said to be a contact metric manifold if \(d \eta =\Phi \), were \(\Phi (X,Y)=g(X,\varphi Y)\) is called the fundamental 2-form of M. If, in addition, \(\xi \) is a Killing vector field, then M is said to be a K-contact manifold. It is well-known that a contact metric manifold is a K-contact manifold if and only if \(\nabla _X\xi =-\varphi X\), for any vector field X on M.
A normal contact metric manifold is called a Sasakian manifold. It can be proved that an almost contact metric manifold is Sasakian if and only if
for any X, Y.
In [17], Oubiña introduced the notion of a trans-Sasakian manifold. An almost contact metric manifold M is a trans-Sasakian manifold if there exist two functions \(\alpha \) and \(\beta \) on M such that
for any X, Y on M. If \(\beta =0\), M is said to be an \(\alpha \)-Sasakian manifold. Sasakian manifolds appear as examples of \(\alpha \)-Sasakian manifolds, with \(\alpha =1\). If \(\alpha =0\), M is said to be a \(\beta \)-Kenmotsu manifold. Kenmotsu manifolds are particular examples with \(\beta =1\). If both \(\alpha \) and \(\beta \) vanish, then M is a cosymplectic manifold. In particular, from (2.2) it is easy to see that the following equation holds for a trans-Sasakian manifold:
Actually, in [14], Marrero showed that a trans-Sasakian manifold of dimension greater than or equal to 5 is either \(\alpha \)-Sasakian, \(\beta \)-Kenmotsu or cosymplectic.
3 Definition of p, q-curves
In a 3-dimensional almost contact metric manifold, there is defined a vector product:
For any unit vector field X, non-proportional to \(\xi \), we can consider the orthogonal basis \(\{X,\varphi X, X\times \varphi X\}\), but
For a unit speed curve, if T is the tangent vector field, then \(\nabla _TT \in \text{ span }\{\varphi T, T\times \varphi T\}=\text{ span }\{\varphi T, \xi -\eta (T)T\}\).
This aim us to study those curves when \(\nabla _TT\) has a constant expression on this reference. Note that the considered basis is orthogonal but not orthonormal. The definition could be given for any dimension, although there is no vector product.
Definition 3.1
A unit speed smooth curve \(\gamma \) on an almost contact metric manifold, \((M,\varphi ,\xi ,\eta ,g)\), is called a p, q-curve if its tangent vector field T satisfies
for certain constants p and q.
These curves generalize both geodesic (\(p=q=0\)) and contact magnetic curves (\(p=0\)). We point out that if the curve is not unit speed parametrized, we write \(\gamma '=|\gamma '|\dot{\gamma }\) and so
Taking into account the equation (1.3) for F-geodesics, it could be possible to study curves satisfying \(\nabla _TT=q(t)\varphi T+p(t)(\xi -\eta (T)T)\) for certain functions p(t), q(t). However, on dimension three every curve admits such an expression; therefore the only interesting case is the constant one. Moreover, as it has been said at the Introduction, many authors have studied the magnetic case, \(\nabla _TT=\varphi T\), independly of the physical interpretations.
There is another reason to study these curves. One of the main procedures to obtain a trans-Sasakian manifold is to make a D-conformal deformation of a Sasakian manifold. However the magnetical character of a curve is not preserved for such a transformation. In Sect. 4 we will prove that, under certain conditions, a D-conformal deformation transforms a magnetic curve into a p, q-curve.
From now on, we call \(\theta \) the angle between the tangent vector field, T, and the structure vector field \(\xi \), that is the contact angle.
4 p, q-curves in 3 Dimensional Trans-Sasakian Manifolds
In the three dimensional case and with a specific structure on the environment we can characterize these curves:
Theorem 4.1
Let \((M,\varphi ,\xi ,\eta ,g)\) be an oriented, 3-dimensional \((\alpha ,\beta )\) trans-Sasakian manifold. Let \(\gamma \) be a curve satisfying \(\nabla _TT=q\varphi T+p(\xi -\eta (T)T)\). If \(\theta =0\), then it is a geodesic, and if \(\theta \ne 0\), then
where \(\theta '=T(\theta )\).
Proof
Given a p, q-curve, let \(\{T,N,B\}\) be the Frenet reference over the curve:
Taking the derivative it and taking into account (3.1), we have
Therefore,
and if \(\theta \ne 0\)
By using (3.1), the curvature is obtained from \(\kappa ^2=g(\nabla _TT,\nabla _TT)=(p^2+q^2)\sin ^2\theta \), that is
And the normal vector field is
The binormal vector field is given by
Then we obtain the torsion from
where we have used (2.2, 2.3, 3.1, 4.1, 4.2). Properly joining, we arrive to
Substituting (4.3) in this equation we get
and we deduce the value of the torsion \(\tau =\alpha +q\cos \theta \).\(\square \)
Actually, we have checked that, on the opposite to magnetic curves of a Sasakian manifold [6], the angle between T and \(\xi \) is not constant. In general, p, q-curves are not slant curves.
In the particular case of magnetic trajectories, this theorem gives:
Corollary 4.2
Let \((M,\varphi ,\xi ,\eta ,g)\) be an oriented, 3-dimensional \((\alpha ,\beta )\) trans-Sasakian manifold. And let \(\gamma \) be a curve satisfying \(\nabla _TT=q\varphi T\). If \(\theta =0\) it is a geodesic, and if \(\theta \ne 0\), then
Proof
It can be directly deduced from Theorem 4.1 for a magnetic trajectory, that is a p, q-curve with \(p=0\). \(\square \)
The case of magnetic trajectories in a \(\beta \)-Kenmotsu manifold was first studied in [19]. It was said that a magnetic trajectory was a slant curve, that is the angle between the tangent vector field and the structure vector field was constant. But this is not true as it was proved in [11] and could be deduced for \(\alpha =0\) in the first equation of (4.4).
4.1 Examples in a Non-trivial 3-Dimensional Trans-Sasakian Manifold
Marrero proved in [14] that, for dimensions greater than or equal to 5, all trans-Sasakian manifolds reduce to \(\alpha \)-Sasakian and \(\beta \)-Kenmotsu ones. Moreover, in [14] and [3] non-trivial examples were built in dimension 3, making D-conformal deformations of a Sasakian manifold. Consider \((M,\varphi ,\xi ,\eta ,g)\) a three dimensional \((\alpha ,\beta )\)-trans-Sasakian manifold, and the D-conformal deformation given by
where \(\sigma \) is a positive function on M, which changes M into a \((\alpha /\sigma ,\xi (\ln \sigma )+2\beta )\) trans-Sasakian manifold. In particular, from a Sasakian manifold we would obtain a \((1/\sigma ,\xi (\ln \sigma ))\) trans-Sasakian manifold, [14].
We are looking for an example of p, q-curve in a non trivial trans-Sasakian manifold.
Let \((M,\varphi ,\xi ,\eta ,g)\) a Sasakian manifold. Applying Koszul’s formula to (4.5)
Taking into account the Sasakian structure and writing \(Z(f)=g(\text{ grad } f,Z)\)
Consider \(\gamma (s)\) a unit speed-parameterized curve in (M, g). Then:
In general, if \(\gamma (s)\) is a p, q-curve in (M, g), it is not such a curve in \((M,g^*)\). But if we consider a Legendre curve, that is a curve whose tangent vector field is orthogonal to the structure vector \(\xi \), then \(\{\dot{\gamma },\varphi \dot{\gamma },\xi \}\) is an orthonormal basis, so we can write
and (4.6) turns to
Cho et al. have studied slant curves in Sasakian 3-manifolds in [7]. They proved a Lancret theorem: non geodesic curves are slant if and only if the ratio of \(\tau \pm 1\) and \(\kappa \) is constant.
In our case it holds:
Note that \(\gamma \) is not arch-length parameterized curve in \((M,g^*)\), so we are looking for an expression like (3.2):
Thefore \(\sigma \) should be obtained as the solution of the following system of partial differential equations:
which are the partial derivatives of \(\sigma \). This construction could be summarized in the next theorem:
Theorem 4.3
Let \(\gamma \) be a non-geodesic Legendre curve in a 3-dimensional Sasakian manifold. Making a D-conformal deformation with \(\sigma \) satisfying (4.7) a p, q-curve is obtained in a \((1/\sigma ,-2p)\) 3-dimensional trans-Sasakian manifold.
4.2 The Case of \(R^3\) with its Usual Sasakian Structure
We are going to solve the differential equation (3.1) in a Sasakian manifold; the techniques are similar to the ones used by Inoguchi and Lee [11]. Consider \((\mathbb {R}^3,\varphi _0,\xi ,\eta ,g)\) with its natural Sasakian structure, which is often identified with the Heisenberg group,
A \(\varphi _0\)-basis is given by
Let \(\gamma (s)=(x(s),y(s),z(s))\) be a unit speed curve in \(\mathbb R^3\). The tangent vector field is
Taking \(T_1(s)=\frac{1}{2}y'(s), T_2(s)=\frac{1}{2}x'(s), T_3(s)=\frac{1}{2}(z'(s)-x'(s)y(s))\), we write \(T(s)=T_1e_1+T_2e_2+T_3e_3\). And \(T_3=\eta (T)=\cos \theta \).
The acceleration vector field is
Therefore, the p, q-curve equation (3.1) can be seen as:
Together with the unit speed condition, \(T_1^2+T_2^2+T_3^2=1.\)
Multipliying the first equation by \(T_1\), the second by \(T_2\) and adding both equations, we have:
Taking the derivative in the unit speed condition, \(2T_1T'_1+2T_2T'_2+2T_3T'_3=0\), and combining both equations, we get:
And therefore \(T_3(s)=\tanh (ps+c)\), for certain constant c. Since \(T_3=\cos \theta \), by using the unit speed condition, we can write
for certain function \(\psi \). Therefore, \({\displaystyle \left( \frac{T_2}{T_1}\right) '=\frac{\psi '}{\cos ^2\psi }}\). But, using the first and second equations,
That implies \(\psi '=q\), that is, \(\psi (s)=qs+k\) for certain constant k.
We must take into account the third equation, that gives
From Theorem 4.1, \(\theta '=-p\sin \theta \), so we arrive to the following condition that relates \(\theta \) and \(\psi \):
This implies
which is not possible for \(p,q\ne 0\), with a variable s. Therefore, we conclude that there are no proper p, q-curves, only geodesic and magnetic ones.
4.3 A Concrete Example in \(H^3(-1)\) with its Kenmotsu Structure
Now, we are going to solve the differential equation (3.1) in a Kenmotsu manifold, using again similar techniques to those from [11].
Consider \(\mathbb H^3(-1)\) the hyperbolic space as the warped product \(\mathbb R(z)\times _{e^{-z}}\mathbb E^2(x,y)\), which is a Kenmotsu manifold, [11]. Its metric is given by
And consider the orthonormal \(\varphi \)-basis:
The Levi-Civita connection is described as:
Let \(\gamma (s)=(x(s),y(s),z(s))\) be a unit speed curve in \(\mathbb H^3(-1)\). The tangent vector field is
Taking \(T_1(s)=e^{z(s)}x'(s), T_2(s)=e^{z(s)}y'(s), T_3(s)=z'(s)\), we write \(T(s)=T_1e_1+T_2e_2+T_3e_3\). And \(T_3=\eta (T)=\cos \theta \).
The acceleration vector field is
Therefore, the p, q-curve equation (3.1) can be seen as:
Together with the unit speed condition, \(T_1^2+T_2^2+T_3^2=1.\)
From the third equation, \(T_3(s)=\tanh (ps+c)\), for certain constant c. Since \(\mathbb H^3(-1)\) is a homogeneous manifold, it is enough to determinate p, q-curves starting at the origin. So we set the initial conditions \(x(0)=y(0)=z(0)=0\) and \(x'(0),y'(0),z'(0)\). From the initial conditions we get
Using \(T_3=\cos \theta \) and the unit speed condition, we can write
Again, \({\displaystyle \left( \frac{T_2}{T_1}\right) '=\frac{\psi '}{\cos ^2\psi }}\), and proceeding as in the previous section, \(\psi '=q\). Then
Again from \(T_3=\cos \theta =\tanh (ps+c)\), it holds:
Then,
with \({\displaystyle k=\tan ^{-1}\frac{y'(0)}{x'(0)}\quad \text{ and }\quad c=\tanh ^{-1}z'(0).}\) We can integrate to obtain x(s) and y(s).
Therefore, we have proved the following result:
Theorem 4.4
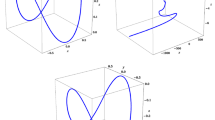
A non-geodesic p, q-curve \(\gamma (s)=(x(s),y(s),z(s))\) in the hyperbolic 3-space \(\mathbb H^3(-1)\), starting at the origin, with initial condition \(x'(0),y'(0),z'(0)\) is parameterized as
where \({\displaystyle k=\tan ^{-1}\frac{y'(0)}{x'(0)}}\) and \(c=\tanh ^{-1}z'(0)\).
5 (p, q)-Curves on \(\beta \)-Kenmotsu Manifolds
Warped product spaces are natural examples of \(\beta \)-Kenmotsu manifolds; in fact such a manifold is locally a warped product. Our idea is to star with a specific curve in an almost complex manifold, and make a proper election of the warping function and rise up the curve to the warped product, to obtain a p, q-curve on a \(\beta \)-Kenmotsu manifold.
Given an almost Hermitian manifold (N, J, G), the warped product \(M=\mathbb R\times _{f}N\), where \(f>0\) is a function on \(\mathbb R\), can be endowed with an almost contact metric structure \((\varphi ,\xi ,\eta , g_f)\). In fact,
is the warped product metric, where \(\pi \) and \(\sigma \) are the projections from \(\mathbb R\times N\) on \(\mathbb R\) and N, respectively; \(\varphi (X)=(J\sigma _{*}X)^{*}\), for any vector field X on M, and \(\xi =\frac{\partial }{\partial t},\) where t denotes the coordinate of \(\mathbb R\).
We need the following lemma from [16]:
Lemma 5.1
Let us consider \(M=B\times _{f} F\) and denote by \(\nabla \), \(\nabla ^{B}\) and \(\nabla ^{F}\) the Riemannian connections on M, B and F. If X, Y are vector fields on B and V, W are vector fields on F, then:
-
(1)
\(\nabla _{X}Y\) is the lift of \(\nabla ^{B}_{X}Y\).
-
(2)
\(\nabla _{X}V=\nabla _{V}X=(Xf/f)V.\)
-
(3)
The component of \(\nabla _{V}W\) normal to the fibers is \(-(g_{f}(V,W)/f) \text{ grad } f\).
-
(4)
The component of \(\nabla _{V}W\) tangent to the fibers is the lift of \(\nabla ^{F} _{V}W\).
Then, if (N, J, g) is a Kaehler manifold, \((M=\mathbb R\times N,\varphi ,\xi ,\eta ,g_f)\) is a \(\beta \)-Kenmotsu manifold with \(\beta =f'/f\); see for example [2].
A unit vector field on \(M=\mathbb R\times _{f}N\) can be decomposed as \(\tilde{X}=U+X=U+\eta (X)\xi \), with U on TN and X the component on \(\mathbb R\):
Using the previous lemma:
Taking into account that U is not unitary for g, and considering U the tangent vector field of a magnetic curve on N, it is clear that, in general, X does not satisfy the p, q-curve equation. But it seems that a proper election of U, f and \(\eta (X)\) would make
and \(\nabla _UU\) would be related with \(JU=q\varphi \tilde{X}\).
We change the writing to \(\tilde{X}=U+\eta (X)\xi =\frac{\sin \theta }{f} V+\cos \theta \xi \), unitary with respect to \(g_f\) and V unitary for g. And suppose that \(\theta \) depends only on \(\xi \). Then the last component is
We take \(\gamma \) a curve in a Kaehler manifold (N, J, g), and consider the rising of that curve \(\bar{\gamma }=(\gamma ,z)\) in \(M=\mathbb R\times _{f}N\), \(z\in \mathbb R\) and \(\gamma \in N\), with tangent vector field \(X=\dot{\bar{\gamma }}=(\sin \theta /f \dot{\gamma }, \cos \theta )\).
Our first attempt is to choose a magnetic curve [1]. Its tangent vector field, \(V=\dot{\gamma }\), satisfies \(\nabla _VV=q_1JV\) for certain constant \(q_1\). We notice that there is no possible election of f and z to obtain a p, q-curve. From (3.1) and (5.1), these two equations should be satisfied:
From (5.2) it should be \(f^2=\frac{q_1}{q}\sin ^2\theta \). Then from (5.3) we would obtain
which is not possible.
Our second attempt is to begin with a geodesic \(\gamma (s)\) on N. Then \(\nabla _VV=0\), \(\bar{\nabla }_UU=0\) and q would be zero. It is only necessary to impose the condition (5.3):
This take to
whose integration gives
that is
for certain constants k and K. Together with \(-2f'(s)/f(s)=p\), that gives
for certain constants c and C.
Therefore we have proved the following result:
Proposition 5.2
Let \(\gamma \) be a geodesic in a Kaehler manifold (N, J, g). For any constants C, K, take \(f(t)=C e^{-1/2pt}\), \(\theta \) with \(3+\cos ^2\theta (t)=Kf(t)^2\) and consider the curve \(\bar{\gamma }(t)=(\gamma (t),\int \cos \theta (t)dt)\) in the warped product manifold \(\mathbb R\times _{f}N\). Then \(\bar{\gamma }\) is a p, 0-curve in a \(\beta \)-Kenmotsu manifold, with \(\beta =-p/2\).
6 (p, q)-Curves in Cosymplectic Manifolds
Let us recall the notion of Frenet curve of osculating order r, \(r\ge 1\). It means that there exists an orthonormal basis of dimension r along \(\gamma (s)\), \(\{T=\dot{\gamma },e_1,...,e_{r-1}\}\), such that
where \(\kappa _j\), \(j=1,...,r-1\) are positive \(\mathbb C^\infty \) functions of s; they are called j-th curvature of \(\gamma \).
Then, a geodesic is a Frenet curve of osculating order 1 and a circle has osculating order 2. Also a curve is called a r-helix if it has osculating order r with constant curvatures.
In [9] it was proved that magnetic curves of a cosymplectic manifold have osculating order 3 (geodesics as integral curves of \(\xi \), Legendre circles or helices). Now, we prove the corresponding result for p, q curves:
Theorem 6.1
Let \((M^{2n+1},\varphi ,\xi ,\eta ,g)\) be a cosymplectic manifold and \(\gamma \) a p, q-curve on M. Then, if \(q\ne 0\), \(\gamma \) is one of the following:
-
(i)
a geodesic, as integral curve of \(\xi \),
-
(ii)
a curve of order 2, with \(\kappa _1=\sqrt{p^2+q^2}\sin \theta \),
-
(iii)
a curve of order 3, with curvatures \(\kappa _1=\sqrt{p^2+q^2}\sin \theta \) and \(\kappa _2=\pm q\cos \theta \).
Proof
In a p, q-curve
In the first case, if \(\kappa _1=0\), \(\gamma \) is a geodesic. As \(q\ne 0\), it implies \(\varphi T=0\), that is T is paralell to \(\xi \), and \(\gamma \) is a integral curve of \(\xi \).
But if \(\kappa _1\ne 0\), \(\kappa _1=\sqrt{p^2+q^2}\sin \theta \) and \(\eta (\kappa _1e_1)=p\sin ^2\theta \). If \(\kappa _2=0\), this gives the second case.
For the last case, remember that, in a cosymplectic manifold,
But from (6.2):
From these two equations, we can isolate \(\nabla _Te_1\), and using (6.2) we substitute \(\varphi T\):
Multiplying by \(e_1\)
But \(T(\kappa _1)=\sqrt{p^2+q^2}\cos \theta \theta '=\sqrt{p^2+q^2}\eta (T)\theta '\), so we arrive to
Writing in (6.3) \(\nabla _Te_1=-\kappa _1T+\kappa _2e_2\), we deduce that \(\xi \) is a combination of \(\{T,e_1,e_2\}\). And multiplying by \(e_2\),
Finally if \(\kappa _2\ne 0\), from (6.4), we can write
But \(\xi \) is a unit vector field so
If \(\kappa _2\ne 0\), from (6.5) \(e_2\) could be written as \(a\xi +bT+ce_1\) for certain functions a(s), b(s), c(s), and
from (6.1) and (6.5) could be written as a combination of \(T,e_1,e_2\), which proves that \(\gamma \) is of osculating order 3. \(\square \)
Note that, opposite to magnetic curves, p, q-curves are neither circles nor helices but osculating curves of osculating order 2 or 3 with non constant curvature and torsion. For cosymplectic manifolds, this result generalizes Theorem 4.1 from 3 to any dimension, taking into account that there the torsion could be negative and now \(\kappa _2\) is positive.
Data Availability
Not applicable.
References
Adachi, T.: Kähler magnetic fields on Kähler manifolds of negative curvature. Differ. Geom. Appl. 29, 52–58 (2011)
Alegre, P., Carriazo, A.: Generalized Sasakian space forms and conformal changes of metric. Results Math. 59(3–4), 485–493 (2011)
Olszak, Z.: Normal almost contact metric manifolds of dimension three. Ann. Polon. Math. 47(1), 41–50 (1986)
Ates, O., Munteanu, M.I.: Periodic \(J\)-trajectories on \(R\times S^3\). J. Geo. Phys. 133, 141–152 (2018)
Bejan, C.L., Druta-Romaniuc, S.L.: F-geodesic on manifolds. Filomat 29, 2367–2379 (2015)
Cabrerizo, J.L., Fernandez, M., Gomez, J.S.: On the existence of almost contact structure and the contact magnetic field. Acta Math. Hungar. 125(1–29), 191–199 (2009)
Cho, J.T., Inoguchi, J., Lee, J.E.: On slant curves in Sasakian 3-manifolds. Bull. Austra. Math. Soc. 74, 359–367 (2006)
Druta-Romaniuc, S.L., Inoguchi, J., Munteanu, M.I.: Magnetic curves in Sasakian manifolds. J. Nonlinear Math. Phys. 22(3), 428–447 (2015)
Druta-Romaniuc, S.L., Inoguchi, J., Munteanu, M.I., Nistor, A.I.: Magnetic curves in cosymplectic manifolds. Rep. Math. Phys. 78, 33–48 (2016)
Guvenc, S., Ozgur, C.: On slant magnetic curves in S-manifolds. J. Nonlinar Math. Phys. 26(4), 536–554 (2019)
Inoguchi, J., Lee, J.-E.: \(\varphi \)-trajectories in Kenmotsu manifolds. J. Geom. 113, 8 (2022). https://doi.org/10.1007/s00022-021-00624-0
Inoguchi, J., Munteanu, M.I., Nistor, A.I.: Magnetic curves in quasi-Sasakian 3-manifolds. Anal. Math. Phys. 9, 43–61 (2019)
Jleli, M., Munteanu, M.I., Nistor, A.I.: Magnetic trajectories in an almost contact metric manifold \(R^{2n+1}\). Results Math. 67, 125–134 (2015)
Marrero, J.C.: The local structure of trans-Sasakian manifolds. Ann. Mat. Pura Appl. 162, 77–86 (1992)
Nistor, A.I.: New examples of F-planar curves in 3-dimensional warped product manifolds. Kragujevac J. Math. 43(2), 247–257 (2019)
B. O’Neill. Semi-Riemannian Geometry with Applications to Relativity. Pure and Applied Mathematics 103. Academic Press, New York (1983)
Oubiña, J.A.: New classes of almost contact metric structures. Publ. Math. Debrecen 32, 187–193 (1985)
Ozdemir, Z., Gok, I., Yayli, Y., Ekmekci, F.N.: Notes on magnetic curves in 3D semi-Riemannian manifolds. Turkish J. Math. 39, 412–426 (2015)
Pandey, P.K., Mohammad, S.: Magnetic and slant curves in Kenmotsu manifolds. Surv. Math. Appl. 15, 139–151 (2020)
Funding
Funding for open access publishing: Universidad de Sevilla/CBUA. Not applicable.
Author information
Authors and Affiliations
Contributions
All the authors have equally contributed to the present paper, both obtaining the results and writing it.
Corresponding author
Ethics declarations
Conflict of interest
P. Alegre and A. Carriazo are members of the PAIDI group FQM 327 (Junta de Andalucía, Spain) and A. Carriazo is member of the Institute of Mathematics of the University of Seville (IMUS).
Ethical Approval
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Pablo Alegre and Alfonso Carriazo partially supported by the PAIDI group FQM-327 (Junta de Andalucía, Spain) and Alfonso Carriazo by PDE-based geometric modeling, image processing, and shape reconstruction (PDE-GIR) (H2020-778035) and is member of IMUS.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Alegre, P., Barrera, J., Carriazo, A. et al. A Generalization of Magnetic Curves in Contact Metric Geometry. Results Math 79, 141 (2024). https://doi.org/10.1007/s00025-024-02169-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00025-024-02169-5