
Abstract
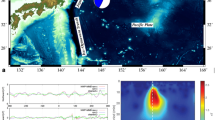
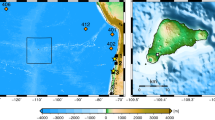
Separating tsunamigenic variations in geomagnetic field measurements in the presence of more dominant magnetic variations by magnetospheric and ionospheric currents is a challenging task. The purpose of this article is to survey the tsunamigenic variations in the vertical component (Z) and the horizontal component (H) of the geomagnetic field using four spatiotemporal methods. Spatiotemporal analysis has shown enormous potential and efficiency in retrieving tsunamigenic contributions from geomagnetic field measurements. We select the Maule (2010) tsunami event on the west coast of Chile and examine the geomagnetic measurements from 13 ground magnetometers scattered in the Pacific Ocean covering a wide area from Chile, crossing the Pacific Ocean to Japan. The tsunamigenic magnetic disturbances are possibly due to two types of contributions, one arising from direct ocean motion and the other from atmospheric motion, both associated with tsunami forcing. Moreover, even though the tsunami waves decrease considerably with increasing epicentral distance, the tsunamigenic contributions are retrieved from a magnetic observatory in Australia (\(\sim\) 13,000 km radial distance from the epicenter). These results suggest that various types of tsunamigenic disturbances can be identified well from the integrated analysis framework presented in this work.









Similar content being viewed by others

Data Availability
The data sets generated and analyzed during the current study are available in the INTERMAGNET program (www.intermagnet.org) and Sea Level Station Monitoring Facility—UNESCO/IOC (www.ioc-sealevelmonitoring.org) sites. The NOAA tsunami travel time map was generated by the MOST (Method of Splitting Tsunami) model and distributed by the NOAA Center for Tsunami Research (http://nctr.pmel.noaa.gov/model.html). The MAGNAMI software is made available to users as supplementary material.
Code Availability
The MAGNAMI software is made available to users as supplementary material.
References
Addison, P. S. (2002). The illustrated wavelet transform handbook: Introductory theory and applications in science, engineering, medicine and finance. CRC Press.
Adhikari, B., Dahal, S., Karki, M., Mishra, R. K., Dahal, R. K., Sasmal, S., et al. (2020). Application of wavelet for seismic wave analysis in Kathmandu Valley after the 2015 Gorkha earthquake, Nepal. Geoenvironmental Disasters, 7, 2. https://doi.org/10.1186/s40677-019-0134-8.
Artru, J., Ducic, V., Kanamori, H., Lognonné, P., & Murakami, M. (2005). Ionospheric detection of gravity waves induced by tsunamis. Geophysical Journal International, 160(3), 840–848. https://doi.org/10.1111/j.1365-246X.2005.02552.x.
Astafyeva, E., Heki, K., Kiryushkin, V., Afraimovich, E., & Shalimov, S. (2009). Two-mode long-distance propagation of coseismic ionosphere disturbances. Journal of Geophysical Research (Space Physics), 114(A10), A10307. https://doi.org/10.1029/2008JA013853.
Balasis, G., & Mandea, M. (2007). Can electromagnetic disturbances related to the recent great earthquakes be detected by satellite magnetometers? Tectonophysics, 431(1–4), 173–195. https://doi.org/10.1016/j.tecto.2006.05.038.
Campbell, W. H. (1989). An introduction to quiet daily geomagnetic fields. Pure and Applied Geophysics, 131(3), 315–331. https://doi.org/10.1007/BF00876831.
Chamoli, A., Swaroopa Rani, V., Srivastava, K., Srinagesh, D., & Dimri, V. P. (2010). Wavelet analysis of the seismograms for tsunami warning. Nonlinear Processes in Geophysics, 17(5), 569–574. https://doi.org/10.5194/npg-17-569-2010.
Galvan, D. A., Komjathy, A., Hickey, M. P., Stephens, P., Snively, J., Tony Song, Y., et al. (2012). Ionospheric signatures of Tohoku-Oki tsunami of March 11, 2011: Model comparisons near the epicenter. Radio Science, 47(4), RS4003. https://doi.org/10.1029/2012RS005023.
Grossmann, A., & Morlet, J. (1984). Decomposition of hardy functions into square integrable wavelets of constant shape. SIAM Journal on Mathematical Analysis, 15(4), 723–736. https://doi.org/10.1137/0515056.
Heidarzadeh, M., & Satake, K. (2015). Source properties of the 1998 July 17 Papua New Guinea tsunami based on tide gauge records. Geophysical Journal International, 202(1), 361–369. https://doi.org/10.1093/gji/ggv145.
Heki, K., & Ping, J. (2005). Directivity and apparent velocity of the coseismic ionospheric disturbances observed with a dense GPS array. Earth and Planetary Science Letters, 236(3–4), 845–855. https://doi.org/10.1016/j.epsl.2005.06.010.
Huang, N., & Shen, S. (2005). Hilbert–Huang transform and its applications, Interdisciplinary mathematical sciences. World Scientific. https://doi.org/10.1142/5862.
Ichihara, H., Hamano, Y., Baba, K., & Kasaya, T. (2013). Tsunami source of the 2011 Tohoku earthquake detected by an ocean-bottom magnetometer. Earth and Planetary Science Letters, 382, 117–124. https://doi.org/10.1016/j.epsl.2013.09.015.
Iyemori, T., Nose, M., Han, D., Gao, Y., Hashizume, M., Choosakul, N., et al. (2005). Geomagnetic pulsations caused by the Sumatra earthquake on December 26, 2004. Geophysical Research Letters, 32, 20. https://doi.org/10.1029/2005GL024083.
Kherani, E. A., Lognonné, P., Hébert, H., Rolland, L., Astafyeva, E., Occhipinti, G., et al. (2012). Modelling of the total electronic content and magnetic field anomalies generated by the 2011 Tohoku-Oki tsunami and associated acoustic-gravity waves. Geophysical Journal International, 191(3), 1049–1066. https://doi.org/10.1111/j.1365-246X.2012.05617.x.
Kherani, E. A., Rolland, L., Lognonné, P., Sladen, A., Klausner, V., & de Paula, E. R. (2016). Traveling ionospheric disturbances propagating ahead of the Tohoku-Oki tsunami: A case study. Geophysical Journal International, 204(2), 1148–1158. https://doi.org/10.1093/gji/ggv500.
Klausner, V., Almeida, T., de Meneses, F. C., Kherani, E. A., Pillat, V. G., & Muella, M. T. A. H. (2016a). Chile 2015: Induced magnetic fields on the Z component by tsunami wave propagation. Pure and Applied Geophysics, 173(5), 1463–1478. https://doi.org/10.1007/s00024-016-1279-y.
Klausner, V., Almeida, T., de Meneses, F. C., Kherani, E. A., Pillat, V. G., Muella, M. T. A. H., et al. (2017). First report on seismogenic magnetic disturbances over Brazilian sector. Pure and Applied Geophysics, 174(3), 737–745. https://doi.org/10.1007/s00024-016-1455-0.
Klausner, V., Domingues, M. O., Mendes, O., da Costa, A. M., Papa, A. R. R., & Ojeda-González, A. (2016b). Latitudinal and longitudinal behavior of the geomagnetic field during a disturbed period: A case study using wavelet techniques. Advances in Space Research, 58(10), 2148–2163. https://doi.org/10.1016/j.asr.2016.01.018.
Klausner, V., Kherani, E. A., & Muella, M. T. A. H. (2016c). Near- and far-field tsunamigenic effects on the Z component of the geomagnetic field during the Japanese event, 2011. Journal of Geophysical Research (Space Physics), 121(2), 1772–1779. https://doi.org/10.1002/2015JA022173.
Klausner, V., Mendes, O., Domingues, M. O., Papa, A. R. R., Tyler, R. H., Frick, P., et al. (2014a). Advantage of wavelet technique to highlight the observed geomagnetic perturbations linked to the Chilean tsunami (2010). Journal of Geophysical Research (Space Physics), 119(4), 3077–3093. https://doi.org/10.1002/2013JA019398.
Klausner, V., Ojeda-González, A., Domingues, M. O., Mendes, O., & Papa, A. R. R. (2014b). Study of local regularities in solar wind data and ground magnetograms. Journal of Atmospheric and Solar-Terrestrial Physics, 112, 10–19. https://doi.org/10.1016/j.jastp.2014.01.013.
Liu, J. Y., Chen, C. H., Lin, C. H., Tsai, H. F., Chen, C. H., & Kamogawa, M. (2011). Ionospheric disturbances triggered by the 11 March 2011 M9.0 Tohoku earthquake. Journal of Geophysical Research (Space Physics), 116(A6), A06319. https://doi.org/10.1029/2011JA016761.
Mallat, S. (2008). A wavelet tour of signal processing: The sparse way (3rd ed.). Academic Press.
Manoj, C., Maus, S., & Chulliat, A. (2011). Observation of magnetic fields generated by tsunamis. EOS Transactions, 92(2), 13–14. https://doi.org/10.1029/2011EO020002.
Minami, T. (2017). Motional induction by tsunamis and ocean tides: 10 years of progress. Surveys in Geophysics, 38(5), 1097–1132. https://doi.org/10.1007/s10712-017-9417-3.
Minami, T., & Toh, H. (2013). Two-dimensional simulations of the tsunami dynamo effect using the finite element method. Geophysical Research Letters, 40(17), 4560–4564. https://doi.org/10.1002/grl.50823.
Morlet, J., Arens, G., Fourgeau, E., & Giard, D. (1982a). Wave propagation and sampling theory—part II: Sampling theory and complex waves. GEOPHYSICS, 47(2), 222–236. https://doi.org/10.1190/1.1441329.
Morlet, J., Arens, G., Fourgeau, E., & Glard, D. (1982b). Wave propagation and sampling theory—part I: Complex signal and scattering in multilayered media. Geophysics, 47(2), 203–221. https://doi.org/10.1190/1.1441328.
Occhipinti, G., Coïsson, P., Makela, J. J., Allgeyer, S., Kherani, A., Hebert, H., et al. (2011). Three-dimensional numerical modeling of tsunami-related internal gravity waves in the Hawaiian atmosphere. Earth Planets and Space, 63(7), 847–851. https://doi.org/10.5047/eps.2011.06.051.
Occhipinti, G., Kherani, E. A., & Lognonné, P. (2008). Geomagnetic dependence of ionospheric disturbances induced by tsunamigenic internal gravity waves. Geophysical Journal International, 173(3), 753–765. https://doi.org/10.1111/j.1365-246X.2008.03760.x.
Occhipinti, G., Lognonné, P., Kherani, E. A., & Hébert, H. (2006). Three-dimensional waveform modeling of ionospheric signature induced by the 2004 Sumatra tsunami. Geophysical Research Letters, 33(20), L20104. https://doi.org/10.1029/2006GL026865.
Rolland, L. M., Lognonné, P., Astafyeva, E., Kherani, E. A., Kobayashi, N., Mann, M., et al. (2011). The resonant response of the ionosphere imaged after the 2011 off the pacific coast of Tohoku earthquake. Earth Planets and Space, 63(7), 853–857. https://doi.org/10.5047/eps.2011.06.020.
Rolland, L. M., Occhipinti, G., Lognonné, P., & Loevenbruck, A. (2010). Ionospheric gravity waves detected offshore Hawaii after tsunamis. Geophysical Research Letters, 37(17), L17101. https://doi.org/10.1029/2010GL044479.
Sanchez-Dulcet, F., Rodríguez-Bouza, M., Silva, H. G., Herraiz, M., Bezzeghoud, M., & Biagi, P. F. (2015). Analysis of observations backing up the existence of VLF and ionospheric TEC anomalies before the Mw6.1 earthquake in Greece, January 26, 2014. Physics and Chemistry of the Earth, 85, 150–166. https://doi.org/10.1016/j.pce.2015.07.002.
Schnepf, N. R., Manoj, C., An, C., Sugioka, H., & Toh, H. (2016). Time-frequency characteristics of tsunami magnetic signals from four Pacific Ocean events. Pure and Applied Geophysics, 173(12), 3935–3953. https://doi.org/10.1007/s00024-016-1345-5.
Soman, K. P., Ramachandran, K. I., & Resmi, N. G. (2004). Insights into wavelets: From theory to practice. Prentice-Hall of India Pvt. Ltd.
Sugioka, H., Hamano, Y., Baba, K., Kasaya, T., Tada, N., & Suetsugu, D. (2014). Tsunami: Ocean dynamo generator. Scientific Reports, 4, 3596. https://doi.org/10.1038/srep03596.
Toh, H., Satake, K., Hamano, Y., Fujii, Y., & Goto, T. (2011). Tsunami signals from the 2006 and 2007 Kuril earthquakes detected at a seafloor geomagnetic observatory. Journal of Geophysical Research (Solid Earth), 116(B2), B02104. https://doi.org/10.1029/2010JB007873.
Toledo, B. A., Chian, A. C. L., Rempel, E. L., Mirand, R. A., Muñoz, P. R., & Valdivia, J. A. (2013). Wavelet-based multifractal analysis of nonlinear time series: The earthquake-driven tsunami of 27 February 2010 in Chile. Physical Review E, 87(2), 022821. https://doi.org/10.1103/PhysRevE.87.022821.
Torres, C. E., Calisto, I., & Figueroa, D. (2019). Magnetic signals at Easter Island during the 2010 and 2015 Chilean tsunamis compared with numerical models. Pure and Applied Geophysics, 176(7), 3167–3183. https://doi.org/10.1007/s00024-018-2047-y.
Tyler, R. H. (2005). A simple formula for estimating the magnetic fields generated by tsunami flow. Geophysical Research Letters, 32(9), L09608. https://doi.org/10.1029/2005GL022429.
Utada, H., Shimizu, H., Ogawa, T., Maeda, T., Furumura, T., Yamamoto, T., et al. (2011). Geomagnetic field changes in response to the 2011 off the Pacific Coast of Tohoku Earthquake and Tsunami. Earth and Planetary Science Letters, 311(1), 11–27. https://doi.org/10.1016/j.epsl.2011.09.036.
Zhang, L., Utada, H., Shimizu, H., Baba, K., & Maeda, T. (2014). Three-dimensional simulation of the electromagnetic fields induced by the 2011 Tohoku tsunami. Journal of Geophysical Research (Solid Earth), 119(1), 150–168. https://doi.org/10.1002/2013JB010264.
Zubizarreta, J. R., Cerdá, M., & Rosenbauma, P. R. (2013). Effect of the 2010 Chilean earthquake on posttraumatic stress reducing sensitivity to unmeasured bias through study design. Epidemiology, 24(1), 79–87. https://doi.org/10.1097/EDE.0b013e318277367e.
Acknowledgements
The authors wish to thank CNPq (process number 165873/2015-9, 300894/2017-1) and FAPESP (process number 11/21903-3 and 15/50541-3). The authors would like to thank the National Oceanic and Atmospheric Administration (NOAA) and the International Real-time Magnetic Observatory Network (INTERMAGNET) and Sea Level Station Monitoring Facility-UNESCO/IOC for the data sets used in this work.
Funding
This research was supported by FAPESP (11/21903-3 and 15/50541-3) and CNPq (147392/2017-9, 118040/2017-0, 305249/2018-5, 431396/2018-3).
Author information
Authors and Affiliations
Contributions
VK and HGM developed the MAGNAMI software; MVC contributed to MAGNAMI validation and data analysis; VK, HGM, and EAK contributed to methodology development, implementation and analysis; and all authors contributed to writing and reviewing the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Ethics approval
Not applicable.
Consent to participate
All authors voluntarily agreed to participate in this research manuscript.
Consent for publication
All authors give their consent to publish this manuscript in the journal Pure and Applied Geophysics.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Mathematical Tools
Appendix: Mathematical Tools
1.1 Continuous Wavelet Transform
A wavelet is an oscillating function of time which has finite energy, and is very suitable for analysis of nonstationary data. This class of functions is well localized in both time and frequency, which allows one to perform simultaneous time and frequency analysis (Morlet et al. 1982a, b; Grossmann and Morlet 1984). Mathematically, a wavelet is a function \(\psi\) in the Hilbert Space \(L^2({\mathbb {R}})\) that satisfies the admissibility condition, that is,
where \({\hat{\psi }}\) denotes the Fourier transform of \(\psi\). To guarantee that the integral in (1) is finite, \(\psi\) must have zero average (\({\hat{\psi }}(0) = 0\)) and \({\hat{\psi }}\) must be a continuously differentiable function (Mallat 2008). The zero average requirement implies that a wavelet must oscillate in such a way that the net area below the curve is zero. There are several types of wavelets that are used for data analysis, and the choice of wavelet depends on the purpose of the analysis. Wavelets equal to the second derivative of a Gaussian occur frequently in applications and are called Mexican hats (Mallat 2008), defined as
where \(\sigma > 0\). Another type of wavelet that appears frequently is the complex Morlet wavelet, commonly defined as
where \(f_{0}\) is the center frequency of the wavelet. As can be seen from Eq. (3), the Morlet wavelet consists of a complex wave within a Gaussian envelope that has unit standard deviation. The factor \(\pi ^{-1/4}\) ensures that the wavelet has unitary energy.
There are two types of operations that one can do over wavelets: translation and dilation. For the first one, the central position of the wavelet along the time axis is shifted, whereas for the second, the wavelet is compressed or dilated. Strictly speaking, if \(\psi\) denotes a wavelet, then it will be called the mother wavelet, and the family of functions \(\psi _{a,b}\) spanned by those operations is known as daughter wavelets and is given by
where \(a > 0\) and \(b \in {\mathbb {R}}\) are called dilation and translation parameters, respectively. It is important to note that the factor \(1/\sqrt{a}\) ensures that all daughter wavelets have the same energy. Thus, relative to every wavelet \(\psi\), the continuous wavelet transform (CWT) of a signal f for an instant of time b and scale a is defined by
where \(\langle \cdot , \cdot \rangle\) denotes the usual inner product of \(L^{2}({\mathbb {R}})\). Equation (5) can be thought of as an analysis equation, since it represents the projection Wf(a, b) of f over a daughter wavelet centered at b with scale a. Since the projections are computed to every value of b and a, at the end of the process one obtains a two-dimensional transform plane with all the projections or wavelet coefficients, which represents the decomposition of the signal f over a family of daughter wavelets. Each of these coefficients has an energy which is given by
and the plot of E(a, b) is called a scalogram. The CWT preserves the total energy of a signal f and can be recovered by integrating (6) for all values of a and b:
The main feature of the CWT is time–frequency localization (Soman et al. 2004). So, to obtain a time–frequency plane it is necessary to convert the scales to so-called pseudo-frequencies, which can be done using the equation
where \(f_{c}\) is the center frequency of the mother wavelet (\(a = 1\)) defined by
as discussed in Addison (2002). Specifically, the CWT measures the local matching between a signal f and the daughter wavelet at a particular instant of time b and scale a. A large coefficient value means that f and \(\psi _{a,b}\) correlate well in the vicinity of b, whereas a low value indicates the opposite. Similarly to the Fourier transform, from the wavelet coefficients one can recover the original signal f with the synthesis equation defined as
which is also called inverse continuous wavelet transform (ICWT) (Mallat 2008).
1.2 Discrete Wavelet Transform
In this work, we use the Daubechies (db2) wavelet function of order 2, and therefore the nonzero low filter values are \(h \approxeq \left[ \frac{1+\sqrt{3}}{4\sqrt{2}}, \frac{3+\sqrt{3}}{4\sqrt{2}}, \frac{3-\sqrt{3}}{4\sqrt{2}}, \frac{1-\sqrt{3}}{4\sqrt{2}} \right]\), and the high-pass are \(g=(-1)^{k+1}h(1-k)\). Also, we only study the discrete scales \(j=1,2,\; {\text{and}}, \,3\) which are associated with the center frequencies of 3, 6, and 12 min, respectively. These center frequency values are obtained due to our analysis wavelet choice and to the data sample rate of 1-min time resolution; see additional details in Klausner et al. (2014b, 2016a, b, 2017).
Moreover, we use the EWC method to narrow the period band by choosing the first three wavelet decomposition levels according to the physical process in which we intend to highlight. Here, the EWC corresponds to the weighted geometric mean of the square wavelet coefficients per 8 min, as shown in the following equation
where N is equal to 8.
1.3 Hilbert–Huang Transform
The Hilbert–Huang transform (HHT) is an empirical method for analyzing nonstationary data that come from nonlinear processes (Huang and Shen 2005). This transform consists of two main parts: empirical mode decomposition (EMD) and Hilbert spectral analysis (HSA). Despite the importance of HSA, only EMD will be discussed in this article. It is important to note that the main difference between HHT and the conventional transforms is that for the former, the signal under analysis is expanded in terms of an adaptive basis (a basis that comes from the data), whereas for the others the expansion occurs in terms of a prior established basis (Huang and Shen 2005), e.g, sines and cosines for Fourier transform and various translated and dilated versions of the mother wavelet for CWT. Moreover, it can be said that HHT is more an algorithm than a transform, due to the absence of an analytical foundation that will require significant time and effort to accomplish (Huang and Shen 2005).
The EMD method assumes that any data consist of intrinsic modes of oscillations, and those intrinsic modes are obtained by an algorithm called the sifting process, which decomposes a given signal in a set of intrinsic mode functions (IMF), which are functions that satisfy the following conditions (Huang and Shen 2005):
-
The number of maxima and minima points and the number of roots must either be equal or differ at most by 1.
-
At any point, the mean value of the envelope defined by the local maxima and the envelope defined by the local minima is zero.
To perform the sifting process over a given signal f, the first step is to find its extrema points (minimum or maximum) and connect them through a cubic spline, conceiving an upper and a lower envelope for the signal. The second step is to calculate an average envelope from those obtained in the first step and subtract it from the original signal. After these two steps, a test is applied to the resulting signal to determine whether it satisfies the IMF conditions or a stoppage criterion. If it does not, then these steps are applied to the resulting signal until an IMF is obtained. Finally, this IMF is subtracted from f, producing a residue. At this point, the steps are applied to the residue until another IMF is obtained, yielding another residue. This process of obtaining successive residues stops when the last one becomes a monotonic function from which no further IMFs can be extracted.
Suppose that the sifting process stops at the n-th iteration. So, for a residue \(r_{j}\) with \(0 \le j \le n-1\), an IMF is extracted by the following recurrence relation
where \(m_{i}\) is the average envelope computed from the upper and lower envelope of \(h_{i - 1}\) and \(r_{0} = f(t)\). Considering that \(h_{i}\) converges to an IMF for some value of i, then the IMF associated with the residue j will be denoted by \(c_{j}\), and the following equation holds
Therefore, from Eq. (13), one can write the original signal f in terms of n IMFs obtained at the end of the sifting process, as follows
1.4 Mean Absolute Percentage Error (MAPE)
The MAPE is a statistical measure, given in percentage terms, of the accuracy of a forecasting model and is defined by
where \(A_{i}\) is the actual value and \(F_{i}\) is the forecast value. Because of the simplicity of Eq. (15), the MAPE is widely used to indicate the accuracy of a forecasting model, but it is scale-sensitive and should not be used with low-volume data.
Rights and permissions
About this article

Cite this article
Klausner, V., Gimenes, H.M., Cezarini, M.V. et al. Geomagnetic Disturbances During the Maule (2010) Tsunami Detected by Four Spatiotemporal Methods. Pure Appl. Geophys. 178, 4815–4835 (2021). https://doi.org/10.1007/s00024-021-02823-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00024-021-02823-x