
Abstract
In this article, we study stochastic homogenization of non-homogeneous Gaussian free fields \(\Xi ^{g,\textbf{a}} \) and bi-Laplacian fields \(\Xi ^{b,\textbf{a}}\). They can be characterized as follows: for \(f=\delta \) the solution u of \(\nabla \cdot \textbf{a} \nabla u =f\), \(\textbf{a}\) is a uniformly elliptic random environment, is the covariance of \(\Xi ^{g,\textbf{a}}\). When f is the white noise, the field \(\Xi ^{b,\textbf{a}}\) can be viewed as the distributional solution of the same elliptic equation. Our results characterize the scaling limit of such fields on both, a sufficiently regular domain \(D\subset \mathbb {R}^d\), or on the discrete torus. Based on stochastic homogenization techniques applied to the eigenfunction basis of the Laplace operator \(\Delta \), we will show that such families of fields converge to an appropriate multiple of the GFF resp. bi-Laplacian. The limiting fields are determined by their respective homogenized operator \({{\,\mathrm{\bar{\textbf{a}}}\,}}\Delta \), with constant \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) depending on the law of the environment \(\textbf{a}\). The proofs are based on the results found in Armstrong et al. (in: Grundlehren der mathematischen Wissenschaften, Springer International Publishing, Cham, 2019) and Gloria et al. (ESAIM Math Model Numer Anal 48(2):325-346, 2014).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Heat flow through materials with randomly placed impurities (porous media) is typically modelled using parabolic or elliptic equations in divergence form and diffusion matrices \(\textbf{a}\) modelling the environment, [11, 31, 36].
The steady-state solution u of some corresponding parabolic PDE satisfies:
on D and \(u=0\) on \(\partial D\), where \(\textbf{a}: {\mathbb R}^d \rightarrow {\mathbb R}^{d \times d}\) is a matrix valued function of the random environment. Provided that certain hypotheses over \(\textbf{a}\) are true, e.g. that \(\textbf{a}\) is stationary, there exists a matrix \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) such that the solution u of the equation above can be well approximated by the solution \(\bar{u}\) with constant coefficients \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) given by
on D and \(\bar{u}=0\) on \(\partial D\). In all cases that we consider in this article, \({{\,\mathrm{\bar{\textbf{a}}}\,}}= c {{\,\textrm{Id}\,}}\), where \({{\,\textrm{Id}\,}}\) is the \(d\times d\) identity matrix and \(c \in {\mathbb R}_{+}\) is deterministic constant that only depends on the law of the environment. We abuse notation by denoting the constant c by the same symbol \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) to simplify notation.
Stochastic homogenization aims at identifying \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) and quantifying the convergence of the solution u of the heterogeneous equation to the solution of an appropriate deterministic constant-coefficient equation \(\bar{u}\).
To define the approach formally, we fix the domain D and introduce a parameter \(0 < \varepsilon \ll 1\) that represents the ratio of microscopic and macroscopic scales. The physical intuition behind this approach is the assumption that the coefficients modelling the porous medium vary on a microscopic scale, whereas on a macroscale the random environment shows effective behaviour.
Then, we rescale the coefficient field \(\textbf{a}\) in Eq. (1.1) by defining
where \(\textbf{a}_{\varepsilon }(\cdot ) = \textbf{a}(\cdot /\varepsilon )\).
One can then prove that in fact, under certain conditions on the law of the field \(\textbf{a}\), \(u^{\varepsilon }\) converges to \(\bar{u}\) as \(\varepsilon \rightarrow 0\) in some appropriate functional space.
There is a rich mathematical theory developed on stochastic homogenisation, [1, 2, 4, 18, 23, 25, 26, 30, 34] just to mention a few. In particular, in the last few years, quantitative results about the convergences as \(\varepsilon \rightarrow 0\) were developed.
In this article, we want to use tools of quantitative stochastic homogenization in order to understand large-scale behaviour of the non-homogeneous Gaussian free field (GFF) and bi-Laplacian field, whose covariance structure is related to non-homogeneous differential operator \({{\,\mathrm{\nabla \cdot \textbf{a} \nabla }\,}}\), in a domain \(D\subset \mathbb {R}^d\) and on the discrete torus. Those fields appear as distributional solutions of the equation (1.1) for different choices of f, i.e. \(f=\delta \) Dirac delta resp. \(f=\xi \) white noise.
Their homogeneous counterparts, that is, the (homogeneous) GFF \(\Xi ^g_D\) and bi-Laplacian field \(\Xi ^b_D\), are the two most prominent examples of the family of fractional Gaussian fields, [29]. The GFF has a wide range of connections to, for example, scaling limits of observables of interacting particle systems [24], quantum field theory [3], and invariant measures of Allan–Cahn-type stochastic partial differential equations [22]. The bi-Laplacian field or membrane model is related to scaling limits of uniform spanning trees [32], odometer functions of sandpile models [9, 28] and general interface models [16].
In our main result, Theorem 3.1 states that the non-homogeneous GFF and bi-Laplacian field (see Definition 2.6 and 2.7) converge
and
as \(\varepsilon \rightarrow 0\), respectively, in some appropriate Sobolev space. In the second result, Theorem 3.2, we will prove the equivalent of (1.4) and (1.5) starting in a discretized torus.
To the best of the authors knowledge, the results presented in this work are novel and have not been previously published in the literature. In particular, our work extends the techniques outlined in previous papers such as [1, 18] for the stochastic homogenization analysis of the bi-Laplacian. This extension involves not only accounting for the randomness resulting from \(f=\xi \), but also accommodating the lack of a point-wise definition of the white-noise by viewing it to be a fixed distribution with a predetermined negative Sobolev regularity.
The reader familiar with the GFF and bi-Laplacian field will notice that we prove convergence in a Sobolev space with regularity strictly weaker than the optimal regularity of the GFF and the bi-Laplacian field, due to the existence of the random environment. In fact, we do not expect that convergence of these fields would hold in such topologies, as analogue effects are also found in [1, 19].
The main novelty of our proof is a convenient expansion of \(G^\varepsilon \), the Green’s function of the operator \({{\,\mathrm{\nabla \cdot \textbf{a}_\varepsilon \nabla }\,}}\), in terms of \(\{\phi _k\}_{k\in {\mathbb N}}\), the orthonormal eigenfunction basis of \(\Delta \). Using the fact that the operator \({{\,\mathrm{\nabla \cdot \textbf{a}_\varepsilon \nabla }\,}}\) in (1.3) is self-adjoint, we have that
where \({{\,\mathrm{\nabla \cdot \textbf{a}_\varepsilon \nabla }\,}}\varphi ^\varepsilon _k = -\lambda _k {{\,\mathrm{\bar{\textbf{a}}}\,}}\phi _k\), \(\lambda _k\) is the eigenvalue of \(\Delta \) associated with \(\phi _k\). With this expansion, we are able to push results from quantitative stochastic homogenization of continuous functions to convergence of the Green’s function, resulting in the convergence of the non-homogeneous random fields.
The manuscript is organized as follows: In Sect. 2, we will introduce the notation and define non-homogeneous Gaussian free fields and bi-Laplacian fields in regular domains and on the torus. Our main results are presented in Sect. 3, and their proofs are postponed to Sect. 4. Finally, in Sect. 5, we discuss some possible extensions and cite-related results regarding large-scale behaviour of Gaussian fields in random environments.
2 Notation and Preliminaries
2.1 Function Spaces
2.1.1 Continuous Spaces
First, we need to define the types of domains for which our results hold
Definition 2.1
(Regular domains). Let \(d \ge 2\) and \(D \subset {\mathbb R}^d\) be a domain. We say that D is a regular domain if it is bounded and at least one assumption of the two holds:
-
The domain D is convex; or
-
Every point of \(\partial D\) (topological boundary of D) has a neighbourhood \(\mathcal {N}\) such that \(\partial D \cap \mathcal {N}\) can be represented, up to a change of variables, as the graph of a \(C^{1, 1}(\mathbb {R}^{d-1})\).
We will always assume that a domain is regular, according to the above definition. For a domain D, consider \(\{ \phi _k \}_{k \in \mathbb {N}}\) be an orthonormal basis of \(L^2(D)\) composed of eigenfunctions
which are enumerated so that \(\lambda _k\) is non-decreasing in k. Notice that by classical regularity theory, we have that \(\phi _k\) are all \(C_c^\infty (D)\). Remember that for all \(k \ge 1\), \(\lambda _k >0\).
In the case of \(D={\mathbb T}^d\), besides requiring periodicity, we also require \(\int _{D} \phi _k(x) dx =0\) rather than the boundary condition in (2.1). In this case, it will be more convenient to index the eigenfunctions and eigenvalues by \(k \in {\mathbb Z}^d {\setminus } \{0\}\). This is because the Fourier basis given by \(\{\phi _k\}_{k \in {\mathbb Z}^d}\), where \(\phi _k:= \exp (2\pi \iota k \cdot x)\) is also an orthonormal basis of eigenvectors of the Laplacian in \({\mathbb T}^d\) with periodic boundary conditions. Again, because of the mean-zero condition, we exclude the 0-th Fourier term and therefore \(\lambda _k >0\).
Due to this different indexing, in what follows, we will often write \(\sum _{k \ne 0}(\dots )\) to denote either \(\sum _{k = 1}^\infty (\dots )\) or \(\sum _{k \in {\mathbb Z}^d {\setminus } \{0\}} (\dots )\) depending on whether we are working on a domain or in the torus.
We will denote by \(\langle f,g \rangle \) the \(L^2(D)\) inner product if \(f, g \in L^2(D)\) and (by abuse of notation) the pairing between a distribution f and a smooth function g.
Definition 2.2
For every dimension \(d \ge 1\), and \(\beta >0\), consider
-
For \(D \subset {\mathbb R}^d\) a regular domain, we define the Hilbert space \(H^\beta _0(D)\) as the closure of \(C^\infty _c(D)\) functions with the norm
$$\begin{aligned} ||f||^2_{H^\beta _0(D)}:= \sum _{k=1}^{\infty } |\langle f,\phi _k \rangle |^2 \lambda _k^{2\beta }. \end{aligned}$$(2.2) -
For \(D ={\mathbb T}^d\), we define the Hilbert space \(H^\beta _0({\mathbb T}^d)\) as
$$\begin{aligned} H^\beta _0({\mathbb T}^d):= \left\{ f \in L^2({\mathbb T}^d): \int _{{\mathbb T}^d} f(x) dx =0 \text { and }||f||_{H^\beta _0({\mathbb T}^d)} < \infty \right\} \end{aligned}$$(2.3)where
$$\begin{aligned} ||f||^2_{H^\beta _0({\mathbb T}^d)}:= \sum _{k \in {\mathbb Z}^d \setminus \{0\}} |\langle f,\phi _k \rangle |^2 \lambda _k^{2\beta }. \end{aligned}$$(2.4)
We can also easily characterize the dual space of \(H^\beta _0(D)\). For \(\beta >0\), the space \(H^{-\beta }_0(D)\) is given by the continuous linear functionals on \(H^\beta _0(D)\). The weak-\(*\) topology in this space induces the norm given by (2.2), but with \(\beta \) substituted by \(-\beta \). To highlight whether we are talking about a space of functions or a space of distributions, unless stated otherwise, we take \(\beta \) to be positive.
For strictly technical reasons, we will need to introduce another type of fractional Sobolev spaces denoted by \(W^{\alpha ,p}(D)\). We will use these spaces in the proof of Lemma 4.2 where we rely on the bounds provided by Theorem 4.1 from [1]. We refer to Remark 1 for a comment on the relation between the two types of Sobolev spaces.
For \(m \in {\mathbb N}_0:={\mathbb N} \cup \{0\}\) and \(p \ge 1\), we will consider the Sobolev space \(W^{m,p}(D)\)
where for a given multi-index \(\alpha \), we denote \(\partial ^\alpha f = \partial ^{\alpha _1}\dots \partial ^{\alpha _d} f\) and \(|\alpha |=\alpha _1+\cdots +\alpha _d\). The general \(m\in \mathbb {R}_+\) case will be defined as follows.
Definition 2.3
The fractional Sobolev space \(W^{\beta ,p}(D)\) for any \(\beta > 0\), \(p\ge 1\) and \(d\ge 2\) is defined by
where
\(\lfloor \cdot \rfloor \) stands for the floor function and
is called the Gagliardo semi-norm for \(\delta \in (0,1)\).
Remark 1
(Comparison between \(H^{\beta }_0(D)\) and \(W^{\beta ,p}(D)\) spaces). For the purpose of this article, we are interested in the \(W^{\beta ,p}(D)\) topology in order to apply Theorem 4.1, for which the results are only valid for \(p >2\). Notice that in this case \(W^{p,\beta }(D)\) is not a Hilbert space, therefore, we will not directly compare the topologies \(W^{\beta ,p}(D)\) and \(H^{\beta }_0(D)\).
However, the \(W^{\beta ,2}(D)\)-norm of a mean zero function f can be written in terms of the \(L^2(D)\)-norm of the singular integral definition of the fractional Laplacian operator restricted to D. On the other hand, the \(H^{\beta }_0(D)\)-norm of f is the \(L^2(D)\)-norm of the spectral definition of fractional Laplacian. These spaces do not coincide in for general domains, unless \(\beta \in {\mathbb N}\). For more information on this matter, we suggest [15].
Finally, for two nonnegative functions f, g we write
if there exists a positive constant \(C=C(\gamma _1, \gamma _2, \dots ,\gamma _k)>0\) and we want to emphasize its dependence of the parameters such that for all x
If we do not want to emphasize the dependence we simply will write \(f\lesssim g\).
2.1.2 Discrete Spaces
Let \({\mathbb T}^d_N:= \frac{1}{N} {\mathbb Z}^d_N\), where \({\mathbb Z}^d_N:= [-\frac{N}{2},\frac{N}{2})^d \cap \mathbb {Z}^d\) is to be understood as a discretized torus, i.e. a graph with a periodic boundary. In this context, we use \(E^d_N\) to denote the edges of the graph \({\mathbb Z}^d_N\).
For a function \(f: {\mathbb T}^d_N \longrightarrow {\mathbb C}\), we will denote its restriction by \({\mathbb T}^d_N\) as \(f^N = f|_{{\mathbb T}^d_N}\). Notice that \(\{\phi ^N_k\}_{k \in {\mathbb Z}^d_N}\) is an orthonormal basis of the space \(\ell ^2({\mathbb T}^d_N):={\mathbb C}^{{\mathbb T}^d_N}\) with respect to the inner product
When discussing scaling limits of discrete models, we will always use x, y to denote points of \({\mathbb Z}^d\) or \({\mathbb Z}^d_N\), and use \(\hat{x}\), \(\hat{y}\) to denote points in \({\mathbb T}^d_N\).
2.2 Gaussian Fields
In this section, we will introduce the Gaussian free field and bi-Laplacian field in continuous domains, \(D\subset \mathbb {R}^d\). First we will consider the homogeneous and then the non-homogeneous setting. Throughout this article, we distinguish between two scenarios for D, in which we either take D to be a regular domain (cf. Definition 2.1), or \(D={\mathbb T}^d\).
2.2.1 Gaussian Fields in the Continuum
2.2.2 Homogeneous Fields
Definition 2.4
The Gaussian free field \(\Xi _D^g\) on D is a random distribution defined by:
for \(f\in C^{\infty }_0({\mathbb R}^d)\) with covariance given by
where \(f,g \in C^{\infty }_0({\mathbb R}^d)\). The Green’s function \(G_D(x,y)\) is given by the distributional solution of
where \(x \in D\), \(\Delta \) is the Laplacian operator and \(\delta \) is the Dirac delta function. For \(D={\mathbb T}^d\), we substitute the assumption on the boundary condition in (2.6) by \(\int _{{\mathbb T}^d} G_{{\mathbb T}^d}(x,y)dy=0\).
A common representation of the Green’s function in spectral terms is the following:
Let us remark again that, in the case \(D={\mathbb T}^d\), we can ignore the atom at 0-th Fourier coefficient because we only consider mean-zero test functions. We will use a similar representation for the non-homogeneous case, as it will allow to quantify the distance between the fields we are interested in. Note that for any given test function f, we can write
where \(\widehat{\Xi }^g_D(k):= \langle \Xi ^g_D,\phi _k\rangle \). Therefore, we can reduce \(\Xi ^{g}_D\) to the infinite-dimensional Gaussian vector \(\{\hat{\Xi }^g_D(k)\}_{k\ge 1}\), which has the covariance function
with \(\delta _{k,k^\prime }\) representing the Kronecker delta function, and \(k, k'\in \mathbb {N}\). Let \(\xi \) denote the (spatial) white noise in \(L^2({\mathbb R}^d)\):
In the following definition we follow the approach in [29].
Definition 2.5
The bi-Laplacian field \(\Xi ^b_D\) in \(D\subset {\mathbb R}^d\) is the random distribution, solution of
where \(\xi \) denotes the white noise defined in (2.9).
The definition above can be related to the so-called eigenvalue bi-Laplacian field, see [29]. In Sect. 5, we discuss the another definition of bi-Laplacian field in a domain and how to obtain similar results.
Let us remark that, for \(\widehat{\xi }(k):= \langle \xi ,\phi _k\rangle \), we have that
satisfies the distributional equation (2.10). Moreover, if \(D \subset {\mathbb R}^d\) is a domain due to Weyl’s law which states that \(\lambda _k \asymp _{D,d} k^{2/d}\) (see [27, Appendix B] for a proof), we have that \(\Xi ^{b}_D\) belongs to \(H^{\beta }_0(D)\) for all \(\beta < -\frac{d}{4}+1\). Similarly, we can prove that \(\Xi ^{g}_D\) belongs to \(H^\beta _0(D)\) for all \(\beta < -\frac{d}{4}+\frac{1}{2}\). Notice that for sufficiently small dimensions, the fields can be interpreted as functions in positive Sobolev spaces.
Remark 2
Using the definition of the bi-Laplacian field above, one can show that its covariance function is given by:
which, for each fixed \(x \in D\), solves the equation
Notice that, as \(\Delta ^2\) is a differential operator of order 4, we need to define additional boundary conditions when compared to partial differential equations driven by the Laplacian operator, in order to make \(G_D\) well-defined. This is the so-called Green’s function of the bi-Laplacian operator with Navier boundary conditions. There are other sensible choices for the boundary conditions for the bi-Laplacian operator on a regular domain D.
One can then define the bi-Laplacian field by setting its covariance to be the Green’s function of a bi-Laplacian operator with a given boundary condition (similar to Definition 2.8). However, one needs to consider that this choice leads to different fields.
In contrast, on the torus, periodic boundary conditions are the only natural choice for the Green’s function of the bi-Laplacian field (and therefore for associated field).
Gaussian Fields in Random Media
Let us introduce the random environment a and present some assumptions. We will follow the approach in [1]. The probability space of the environment will be denoted by \((\Omega (\Lambda ), \tilde{{\mathcal F}}, \textbf{P})\), which we will define in the sequel.
Call \({\mathbb R}^{d\times d}_{{{\,\textrm{sym}\,}}}\) the set of real valued symmetric matrices. We will be interested in maps \(\textbf{a}: {\mathbb R}^d \rightarrow {\mathbb R}^{d \times d}_{{{\,\textrm{sym}\,}}}\) for which there is a constant \(\Lambda >1\) such that
We then define the space
Fix \(U \subset {\mathbb R}^d\), we will consider \({\mathcal F}_U\), the \(\sigma \)-algebra generated by the maps
for \(i,j \in \{1,\dots ,d\}\) and \(f \in C^\infty _c(U)\) a test function. Moreover, we define \(\tilde{\mathcal {F}} ={\mathcal F}_{{\mathbb R}^d}:= \sigma \left( \bigcup _{U \subset {\mathbb R}^d} {\mathcal F}_U \right) \). Let \(\textbf{P}\) be a probability distribution on \((\Omega (\Lambda ),\tilde{{\mathcal F}})\) with the following properties:
-
(A1)
Translation invariance: For each \(z \in {\mathbb R}^d\), we have \(\textbf{P} \circ (\tau _z)^{-1}= \textbf{P}\) where \(\tau _z \textbf{a}(x):=\textbf{a}(x+z)\) is a translation.
-
(A2)
Unit range of dependence: \({\mathcal F}_U\) and \({\mathcal F}_V\) are \({ \textbf{P}}\)-independent for each pair \(U,V \subset {\mathbb R}^d\) such that \(d(U,V)\ge 1\), \(d(\cdot ,\cdot )\) is the Hausdorff distance.
-
(A3)
Isotropic in law: For each \(I: {\mathbb R}^d \longrightarrow {\mathbb R}^d\) isometry such that I maps each of the coordinate axes to another, we have that \(\textbf{P} \circ I^{-1} = \textbf{P}\).
Let us remark that Assumptions (A1) and (A2) are standard in [1], but (A2) can be relaxed to sufficiently fast decaying covariances. Assumption (A3) is a matter of convenience. In this case, the homogenized operator is given by a multiple of the Laplacian (instead of \({{\,\mathrm{\nabla \cdot {{\,\mathrm{\bar{\textbf{a}}}\,}}\nabla }\,}}\) where \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) is a matrix). In this case, the asymptotic behaviour of the \(L^p(\mathbb {R}^d)\)-norms of the eigenvectors of the limiting operator, \(\phi _k\)’s, are well understood.
Definition 2.6
Let \((\Omega (\Lambda ) \otimes \Omega , \tilde{\mathcal {F}}\otimes {\mathcal F}, \textbf{P} \otimes {{\mathbb P}})\), \(D \subset {\mathbb R}^d\) a regular domain, and \(\textbf{a} \in \Omega (\Lambda )\) fixed. Furthermore, let \(G_D^{\textbf{a}}(\cdot ,\cdot )\) be the solution of
for each \(x \in D\). We define \(\Xi ^{g,\textbf{a}}_{D}\) a non-homogeneous Gaussian free field as the Gaussian random field with mean 0 and covariance given by
where \(f,g\in C^{\infty }_c({\mathbb R}^d)\).
Definition 2.7
Let \((\Omega (\Lambda ) \otimes \Omega , \tilde{\mathcal {F}}\otimes {\mathcal F}, \textbf{P} \otimes {{\mathbb P}})\), \(D \subset {\mathbb R}^d\) a regular domain, and \(\textbf{a} \in \Omega (\Lambda )\) fixed. We define \(\Xi ^{b, \textbf{a}}_D\) a non-homogeneous bi-Laplacian as the distributional solution to
For a given random environment \(\textbf{a} \in \Omega (\Lambda )\), stochastic homogenization techniques will allow determining limiting fields of \(\Xi ^{g, {\varepsilon }}_D:=\Xi ^{g, \textbf{a}_{\varepsilon }}_D\) resp. \(\Xi ^{b, {\varepsilon }}_D:=\Xi ^{b, \textbf{a}_{\varepsilon }}_D\) where \(\textbf{a}_{\varepsilon }(x):=\textbf{a}(x/\varepsilon )\) and \(x \in D\).
The main idea of this article is to obtain a good representation for the non-homogeneous fields not in terms of the eigenfunctions of \({{\,\mathrm{\nabla \cdot \textbf{a}_\varepsilon \nabla }\,}}\) but instead, in terms of the eigenfunctions of the liming operator. For this, we will need to introduce a sequence of functions that we call the pseudo-eigenfunctions \(\{\varphi _k^{\varepsilon }\}_{k\in \mathbb {N}}\), solutions of
The deterministic constant \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) is positive and has a special meaning in stochastic homogenization where it is referred to as effective/homogenized coefficient, see Remark 3 for more details.
In particular, we will show that the non-homogeneous GFF \(\Xi _D^{g, \varepsilon }\) can be written as a mean-zero infinite Gaussian vector
where \(\hat{\Xi }_D^{g,{\varepsilon }}(k):=\langle \Xi _D^{g},\varphi ^{\varepsilon }_k\rangle \), and has covariance structure
for \(k,k^\prime \ne 0\). Notice that as \(\nabla \cdot \textbf{a}_{\varepsilon } \nabla \) is self-adjoint, we have for all \(k,k' \ne 0\)
Similarly, for the non-homogeneous bi-Laplacian field
where \(\hat{\xi }^{\varepsilon }(k)=\langle \xi , \varphi ^{\varepsilon }_k\rangle \) and \(\varphi _k^{\varepsilon }\) is defined in (2.16).
Remark 3
(The effective coefficient \({{\,\mathrm{\bar{\textbf{a}}}\,}}\)) The effective coefficient \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) only depends on the law of the environment \(\textbf{P}\). In particular in [1, Equation 3.92], the authors provide an explicit formula for \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) in terms of the expected energy and flux of the first-order correctors \(\Phi \). That is, for any unit vector \(e\in \mathbb {R}^d\):
and the first-order corrector \(\Phi _e\) is the difference between the solution of the Dirichlet problem and an affine function defined in [1, Section 3.4]. A similar characterisation holds in the discrete setting (which we introduce in the next section). For more information, see for instance [19].
2.2.3 Gaussian Fields in Discrete Spaces
2.2.4 Homogeneous Fields
Let \(\Delta _N\) be the normalized graph Laplacian of \({\mathbb T}^d_N\) (the discrete torus defined in Sect. 2.1.2), that is
where \(\hat{y}\sim \hat{x}\) denotes that \(\hat{x}\) and \(\hat{y}\) are nearest neighbours in \({\mathbb T}^d_N\). Note that we will use the same definition of the normalized discrete Laplacian as [18]. In this case, we take the Green’s function as the solution of
It will be particularly useful for us that \(\{\phi _k^N\}_{k \in {\mathbb Z}^d_N}\) is also a basis of eigenfunctions of \(\Delta _N\), remember that \(f^N:=f|_{{\mathbb T}^d_N}\). Moreover, we have that the Green’s function of the discrete torus \({\mathbb T}^d_N\) can be written as
where \(\lambda ^{(N)}_k\) is the eigenvalue of \(\Delta _N\) associated with \(\phi ^N_k\).
Before defining the discrete versions of Gaussian fields in random environments, we remind the reader of the definitions of the discrete GFF and the discrete bi-Laplacian field in a discrete torus.
Definition 2.8
The discrete Gaussian free field on the torus is a multivariate Gaussian vector \((\Xi ^g_N(\hat{x}))_{\hat{x} \in {\mathbb T}^d_N}\) with mean zero and covariance \({{\mathbb E}}[\Xi ^g_N(\hat{x})\Xi ^g_N(\hat{y})]=G^N(\hat{x},\hat{y})\), where \(G^N\) is defined in (2.23).
Definition 2.9
Let \((\xi _N(\hat{x}))_{\hat{x} \in {\mathbb T}^d_N}\) be a collection of i.i.d random variables with distribution N(0, 1). The discrete bi-Laplacian field \((\Xi ^b_N(\hat{x}))_{\hat{x} \in {\mathbb T}^d_N}\) is the solution of the finite difference equation
where \((\xi )_N:=\frac{1}{N^d}\sum _{\hat{x}\in {\mathbb T}^d_N} \xi _N(\hat{x})\) is the spatial average of \(\xi _N\) on \({\mathbb T}^d_N\).
2.2.5 Gaussian Fields with Random Conductances
In this context, we will use the stochastic homogenization bounds from [18] instead of [1]. We will keep some of the same notation used in the continuous case in order to make a clear analogy between the two. The underlying probability space will be denoted by \((\Omega ^{{{\,\textrm{dis}\,}}}(\Lambda ), \tilde{{\mathcal F}}, \textbf{P})\).
Consider the Euclidean lattice graph given by \(({\mathbb Z}^d, E^d)\), where \(\{x,y\} \in E^d\) if \(\Vert x-y\Vert _1=1\). Denote the measurable space given by \((\Omega ^{{{\,\textrm{dis}\,}}}(\Lambda ), \tilde{{\mathcal F}})\), where
for some arbitrary constant \(\Lambda >1\), and \(\tilde{{\mathcal F}}\) is the product \(\sigma \)-field indexed by the edges.
Remark 4
Notice that in this discrete context, we are associating the random environment \(\textbf{a}\) to each individual edge \(e \in E^d\), rather than defining a matrix-valued function (as in the continuous case).
Given an element \(\textbf{a} \in \Omega ^{{{\,\textrm{dis}\,}}}(\Lambda )\), we can recover a \(2d \times 2d\) matrix-valued function that gives weights to each of the 2d discrete differences of a function f. However, it is more convenient to simply index the environment \(\textbf{a}\) via the edges, particularly when we want to define the projections \(\Pi _{N}\) below.
Notice that because edges \(e \in E^d\) are always parallel to the axes, we never see mixed derivatives—which are allowed in continuous stochastic homogenization. The hypothesis \(\textbf{a}_e \in (1,\Lambda ]\) is a discrete version of uniform ellipticity and continuity assumption, cf. (2.12).
Product measures on \(\Omega ^{{{\,\textrm{dis}\,}}}(\Lambda )\) should be seen as natural examples of measures satisfying assumptions (A1)-(A3) from the continuous case. In fact, we believe our results should also hold when substituting the product measures with measures which are invariant by translations and rotations, provided that their covariances decay fast enough.
Similarly to the infinite case, we define \((\Omega ^{{{\,\textrm{dis}\,}}}_N(\Lambda ),\tilde{{\mathcal F}}_N)\) by substituting \({\mathbb Z}^d\) with \({\mathbb Z}^d_N\) and \(E^d\) with \(E_N\). Let \(\textbf{P}\) be any product probability measure on \(\Omega ^{{{\,\textrm{dis}\,}}}(\Lambda )\).
We define a projection operator \(\Pi _N: \Omega ^{{{\,\textrm{dis}\,}}}(\Lambda ) \longrightarrow \Omega ^{{{\,\textrm{dis}\,}}}_N(\Lambda )\) by
where \((e_i)_{i=1}^d\) is the canonical basis of \({\mathbb R}^d\), \(\textbf{a} \in \Omega ^{{{\,\textrm{dis}\,}}}(\Lambda )\) and \(e \in E^d_N\).
On the other hand, we define an extension operator from \(\Omega ^{{{\,\textrm{dis}\,}}}_N(\Lambda )\) to \(\Omega ^{{{\,\textrm{dis}\,}}}(\Lambda )\) for \(\textbf{a}\in \Omega _N^{{{\,\textrm{dis}\,}}}(\Lambda )\) and \(e = \{x,y\} \in E^d\) as
where \(e^*\) is the only edge in \(E^d_N\) such that \(e^* = \{x^*,y^*\}\) with \(x^* \equiv x \mod {\mathbb Z}^d_N\) and \(y^* \equiv y \mod {\mathbb Z}^d_N\). For \(\textbf{a} \in \Omega ^{{{\,\textrm{dis}\,}}}(\Lambda )\), we write \(\textbf{a}_N:= {{\,\textrm{Ext}\,}}_N \circ \Pi _N(\textbf{a})\). Notice that, \(\Pi _N \circ {{\,\textrm{Ext}\,}}_N\) is the identity in \(\Omega ^{{{\,\textrm{dis}\,}}}_N(\Lambda )\) and \({{\,\textrm{Ext}\,}}_N \circ \Pi _N(\textbf{a})_e = \textbf{a}_e\) for all \(\textbf{a} \in \Omega ^{{{\,\textrm{dis}\,}}}(\Lambda )\) whenever \(e = \{x,y\}\) with \(x,y \in {\mathbb Z}^d_N\). Let \(\textbf{P}_N\) be an abbreviation for \(\textbf{P}(\Pi _N^{-1} \cdot )\), which is a product measure in \({\mathbb Z}^d_N\).
Finally, for any \(f: {\mathbb T}^d_N \longrightarrow {\mathbb R}\) and any \(\textbf{a} \in \Omega ^{{{\,\textrm{dis}\,}}}(\Lambda )\), we can write
Definition 2.10
Let \((\Omega ^{{{\,\textrm{dis}\,}}}(\Lambda ) \otimes \Omega , \tilde{\mathcal {F}}\otimes {\mathcal F}, \textbf{P}\otimes {{\mathbb P}})\). We define the discrete non-homogeneous Gaussian free field to be the Gaussian vector \((\Xi _N^{g,\textbf{a}}(\hat{x}))_{\hat{x} \in {\mathbb T}^d_N}\) with mean 0 and covariance
where \(G^{N,\textbf{a}}: {\mathbb T}^d_N \times {\mathbb T}^d_N \longrightarrow {\mathbb R}\) is the unique solution of
and \(\delta ^N_{\hat{x},\hat{y}}= \sum _{{z} \in {\mathbb Z}^d} \delta _{N\hat{x},N\hat{y}+z}\), with \(\delta _{\hat{x},\hat{y}}\) being the standard Kronecker delta function.
Call \((\xi _N(\hat{x}))_{\hat{x}\in {\mathbb T}^d_N}\) the i.i.d collection of standard normal random variables.
Definition 2.11
Let \((\Omega ^{{{\,\textrm{dis}\,}}}(\Lambda ) \otimes \Omega , \tilde{\mathcal {F}}\otimes {\mathcal F}, \textbf{P}\otimes {{\mathbb P}})\). The collection of Gaussian random variables \((\Xi _N^{b,\textbf{a}}(\hat{x}))_{\hat{x} \in {\mathbb T}^d_N}\) satisfying
is called discrete non-homogeneous bi-Laplacian field. Again, we are using the notation \((\xi )_N:=\frac{1}{N^d}\sum _{\hat{x}\in {\mathbb T}^d_N} \xi _N(\hat{x})\).
The formal field on \(D={\mathbb T}^d\) as for \(i\in \{b,g\}\) is defined by
where \(\Xi ^{g, \textbf{a}}_N\) is defined in Definition 2.10 and \(\Xi ^{b, \textbf{a}}_N\) in Definition 2.11 and \(c_g=(2d)^{-1/2}\) resp. \(c_b=(2d)^{-1}\).
Remark 5
In (2.28), there is a clear abuse of notation as we are using \(\Xi ^{i,\textbf{a}}_N(\cdot )\) to denote both a random vector (which has well-defined values for every choice of \(\hat{z}\)) and a distribution given by the sum of delta functions (and therefore has no well-defined notion of value at a given point). We chose to do so to simplify the notation.

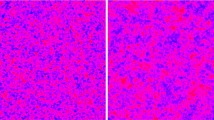
Heat map simulations of the discrete bi-Laplacian fields for \(N=150\) samples with the same noise but different environments \(\textbf{a}_N\). There is a significant change in local features across the different simulations, even between (c) and (d), which are sampled according to the same law. However, the location of the maxima and minima is consistent throughout all samples
3 Main Results
Theorem 3.1
Let \(D \subset {\mathbb R}^d\) be a regular domain, \((\Omega (\Lambda ) \otimes \Omega , \tilde{\mathcal {F}}\otimes {\mathcal F}, \textbf{P}\otimes {{\mathbb P}})\) the underlying probability space, where \(\textbf{P}\) satisfies Assumptions (A1)–(A3). Then, there exists a positive deterministic constant \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) such that the following statements hold.
-
(1)
The non-homogeneous GFF defined in (2.17) converges
$$\begin{aligned} \Xi ^{g,\varepsilon }_D \overset{d}{\longrightarrow }\bar{\textbf{a}}^{-1/2} \Xi ^g_D, \end{aligned}$$as \(\varepsilon \rightarrow 0\) in \(H^{-\beta }_0(D)\), with \(\beta >\frac{d}{4}\).
-
(2)
The non-homogeneous bi-Laplacian field defined in (2.20) converges
$$\begin{aligned} \Xi ^{b,\varepsilon }_D \overset{\textbf{P}\otimes {{\mathbb P}}}{\longrightarrow }\bar{\textbf{a}}^{-1} \Xi ^b_D, \end{aligned}$$as \(\varepsilon \rightarrow 0\) in \(H^{-\beta }_0(D)\), with \(\beta >\frac{d}{4}-\frac{1}{2}\).
Theorem 3.2
Let \((\Omega (\Lambda ) \otimes \Omega , \tilde{\mathcal {F}}\otimes {\mathcal F}, \textbf{P}\otimes {{\mathbb P}})\) where \(\textbf{P}\) is a product measure. Then, there exists a positive deterministic constant \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) such that (1) and (2) hold.
-
(1)
The discrete non-homogeneous GFF defined in (2.28) satisfies
$$\begin{aligned} \Xi ^{g, \textbf{a}}_{D,N} \overset{d}{\longrightarrow }\bar{\textbf{a}}^{-1/2} \Xi ^g_{{\mathbb T}^d} \end{aligned}$$as \(N \rightarrow \infty \). The convergence holds in \(H^{-\beta }_0(D)\), \(\beta >\frac{d}{4}\).
-
(2)
There exists a coupling between \(\xi \) and the sequence \(\xi _N\), such that the discrete non-homogeneous bi-Laplacian field defined in (2.28) satisfies
$$\begin{aligned} \Xi ^{b, \textbf{a}}_{D,N} \overset{\textbf{P} \otimes {{\mathbb P}}}{\longrightarrow }\bar{\textbf{a}}^{-1} \Xi ^b_{{\mathbb T}^d}, \end{aligned}$$as \(N \rightarrow \infty \). The convergence holds in \(H^{-\beta }_0(D)\), \(\beta > \frac{d}{4}-\frac{1}{2}\).
For more details on \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) in both contexts, see Remark 3. Recall that, by abuse of notation, we use \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) simultaneously for \({{\,\mathrm{\bar{\textbf{a}}}\,}}= c {{\,\textrm{Id}\,}}\), where \({{\,\textrm{Id}\,}}\) is the \(d \times d\) identity matrix and \(c={{\,\mathrm{\bar{\textbf{a}}}\,}}\in {\mathbb R}_{+}\) the deterministic constant that only depends on the law of the environment.
Note that in Theorem 3.2 we only take the limit in \(N\rightarrow \infty \) to obtain the homogenized limiting field. This is due to the translation invariant nature of the environment \(\textbf{a}\).
Finally, let us mention that one could easily prove that non-homogeneous bi-Laplacian fields converge almost surely (in more irregular Sobolev spaces than the ones stated above) to their homogeneous counterpart by a simple Borel–Cantelli argument.
4 Proofs
4.1 Proof of Theorem 3.1
We start this section by stating some necessary results regarding stochastic homogenization. Then, we proceed to prove some useful lemmata necessary to recover our representation of the Green’s functions before finally proving the main theorems.
Under the Assumptions (A1)–(A3), there are good bounds for stochastic homogenization of the solutions of elliptic partial differential equations. Indeed, one can prove that there is a positive constant \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) (see Remark 3), such that for u, any sufficiently regular function, we can estimate its \(L^2(D)\) distance to the function \(u^\varepsilon \) given by
We will state a simplified version of a result from [1], which will be one of the main ingredients for our proofs.
For this, we use the stochastic integrability notation \({\mathcal O}_s(\cdot )\) according to the law \(\textbf{P}\). Given a random variable X and parameters \(s,\theta \in (0,\infty )\), we say that \(X={\mathcal O}_s(\theta )\) if
where \(a_+:=\max \{0,a\}\).
Theorem 4.1
(Theorem 6.17 in [1]) Under Assumptions \((A1)--(A3)\), fix \(s \in (0,2)\), \(\alpha \in (0,1], p \in (2, \infty ],\) a regular domain \(D \subseteq \mathbb {R}^{d}\) and \(\varepsilon \in (0, \frac{1}{2}]\). There exists \(\delta =\delta (d,\Lambda )\in (0,\infty )\), \(C=C(s,\alpha ,p,D,d,\Lambda ) \in (0,\infty )\) and a nonnegative random variable \({\mathcal X}_{\varepsilon }\) satisfying the following estimate
such that the following holds: for every \(u \in W^{1+\alpha , p}(D),\) and \(u^{\varepsilon } \in H^{1}_0(D)\) be the solution of (4.1) then we have that
The theorem above implies that for each fixed k, as \(\varepsilon \rightarrow 0\), the function \(\varphi ^\varepsilon _k\) defined in (2.16) converges to \(\phi _k\) in \(L^2(D)\) in probability. In the next lemma, we will quantify such convergence in terms of k and \(\varepsilon \).
Lemma 4.2
On \((\Omega , \mathcal {F}, \mathbb {P})\), we have that for all \(\alpha \in (0,1]\), and \(\kappa >0\)
where \({\mathcal X}_\varepsilon \) satisfies the bound (4.3) for a suitable choice of parameters.
Proof
Fix \(\alpha \in (0,1], \kappa >0\) and let \(p = 2 +\delta \) with \(\delta >0\) to be defined later to be sufficiently small. By applying Theorem 4.1 to \(u=\phi _k\), where \(\phi _k\) is the eigenfunction associated with \(\lambda _k\) the k-th eigenvalue of \((-\Delta )\) we have that for \(p \in (2,\infty )\),
By [7, Theorem 6.4.5], for any given a function \(f \in C^\infty _c({\mathbb R}^d)\), \(s_1,s_2 \in {\mathbb R}\), \(p_1,p_2 > 1\) and \(\theta \in (0,1)\), we have
as long as
This can also be extended to any such function \(f \in W^{s_\theta ,p_\theta }(D)\). Now, if we choose \(s_\theta = 1+\alpha \), \(p_\theta = 2+\delta \), \(s_1=p_1=2\) and \(s_2=0\), we have that \(\theta = (1-\alpha )/2\) and
Notice that as \(\delta \longrightarrow 0^+\), we have that \(p_2 \longrightarrow 2^+\) for any \(\alpha \in (0,1]\). Furthermore, by classical results any \(f \in C_c^\infty (\bar{D})\), such that \(f\mid _{\partial D}\equiv 0\) can be naturally extended to
so that \(\Vert {{\,\textrm{Ext}\,}}f\Vert _{L^{p_2}(\mathbb {R}^d)}=\Vert f\Vert _{L^{p_2}(D)}\) and \(\Vert {{\,\textrm{Ext}\,}}f\Vert _{W^{2,2}(\mathbb {R}^d)}=\Vert f\Vert _{W^{2,2}(D)}\).
As each of the \(\phi _k\) are in \(C_c^\infty (D)\cap H^{2,2}_0(D)\), we can use (4.7), and the isometry properties above to get
where in the last inequality we estimated the \(W^{2,2}(D)\)-norm of \(\phi _k\) by the \(L^2(D)\)-norm of \(\Delta \phi _k = -\lambda _k \phi _k\) and that \(||\phi _k||_{L^2(D)}=1\). Now, we use [20, Theorem 1], which states that
Using the interpolation version of Hölder inequality, the bound (4.9), and the fact that \(\Vert \phi _k\Vert _{L^2(D)}=1\), we have that
The proof is completed by choosing \(\delta \) small enough so that \(\frac{(1-\alpha )(d-1)(1-2/p_2)}{8}\le \kappa \). \(\square \)
Consider \(G^\varepsilon _D\), the fundamental solution of \({{\,\mathrm{\nabla \cdot \textbf{a}_\varepsilon \nabla }\,}}\), that is
Classical results of partial differential equations provide some useful properties for \(G^\varepsilon \), for instance, the symmetry of Green’s function, that is \(G_D(x,y)=G_D(y,x)\), see [21, Theorem 1.3] for the case \(d \ge 3 \) and [14, Section 6] for the case \(d=2\).
The following lemma provides a representation for \( G^\varepsilon _D\). It introduces a natural way of comparing it to the Green’s function of \({{\,\mathrm{\bar{\textbf{a}}}\,}}\Delta \) and gives the main intuition behind our results. Remark that this lemma justifies the representation (2.20) of the non-homogeneous bi-Laplacian fields.
Lemma 4.3
Let \(\textbf{a} \in \Omega (\Lambda )\), and \(\varepsilon \in (0,1]\). Then, we have that the following representation
where \({{\,\mathrm{\bar{\textbf{a}}}\,}}>0\) is the same constant defined in (2.21). For Lebesgue almost all fixed \(x \in D\), for each \(\beta > \frac{d}{4}-\frac{1}{2}\) the series above converges \(\textbf{P}\)-a.s. in the space \(H^{-\beta }_0(D)\).
Proof
Remember that for any \(\textbf{a}\in \Omega (\Lambda )\), the Green’s function is point-wise well-defined on \(D^\prime :=D\times D {\setminus } \{ (x,x):x \in D \}\). Call for simplicity \(G^{\varepsilon }_x:=G^{\varepsilon }_D(x,\cdot )\) for some fixed \(x\in D\). We have that for \(d \ge 3\), \(G^\varepsilon _x \in W^{1,1}_0(D)\) (see [21]) and for \(d=2\) we have that \(G^\varepsilon _x \in L^1(D)\) (see [35]). In either case, we can see \(G^\varepsilon _x\) as a tempered distribution and since \(\phi _k \in C^\infty _c(D)\), we get that \( \langle G^\varepsilon _x, \phi _k \rangle \) is well-defined.
In order to calculate \(\hat{G}^\varepsilon _x(k):=\langle G^\varepsilon _x,\phi _k\rangle \), note that as \(G^\varepsilon \) is the Green’s function of \({{\,\mathrm{\nabla \cdot \textbf{a}_\varepsilon \nabla }\,}}\) and the operator \({{\,\mathrm{\nabla \cdot \textbf{a}_\varepsilon \nabla }\,}}\) is self-adjoint. Therefore, we have that
Hence,
Finally, by integrating in x, we have that
as long as \(\beta > \frac{d}{4}-\frac{1}{2}\), using that \(\alpha \) and \(\kappa \) can be made arbitrarily small and Weyl’s law. This also implies that \(\textbf{P}\)-a.s and almost all x according to the Lebesgue measure, \(\Vert G^\varepsilon _x\Vert _{H^{-\beta }_0(D)}\) is finite. \(\square \)
4.2 Stochastic Homogenization of the GFF
For this proof, we will use a truncation argument and apply the following theorem.
Theorem 4.4
(Theorem 3.2 in [6]). Let S be a metric space with metric \(\rho \). Suppose that \((X_{n, K}, X_{n})\) are elements of \(S \times S\). If
for all \(\tau >0,\) and \(X_{n, K} {\mathop {\longrightarrow }\limits ^{d}}_{n} Z_{K} {\mathop {\longrightarrow }\limits ^{d}}_{K} X\), then \(X_{n} {\mathop {\longrightarrow }\limits ^{d}}_{n} X\).
We will apply the theorem by choosing \(S=H^{-\beta }_0(D)\), \(X = \Xi ^{g}_D\), \(X_n=\Xi _D^{g,\varepsilon }\) and \(\mu =\textbf{P} \otimes {{\mathbb P}}\). Define the following truncations \(X_{n,K}:=\Xi ^{g,\varepsilon }_K\) and \(Z_K:= \Xi ^{g}_K\), centred Gaussian fields such that
and
By truncating the covariance of \(Z_K\) and \(X_{n,K}\), we essentially reduce the problem to convergence of finite-dimensional Gaussian vectors. Since \(\Xi ^{g,\varepsilon }_K\) and \(\Xi ^g_K\) are determined by their covariance structure, the convergence in distribution result will follow from proving that their covariance matrices converge. This will follow from Lemma 4.2 since we truncated for the k’s to be in the set \(\{1,\dots ,K\}\).
In the remainder, we demonstrate that (4.13) holds. Define the error field by
Using the definition of the norm \(H^{-\beta }_0(D)\) and the monotone convergence theorem, we have
Using the triangular inequality first and then Lemma 4.2, we get that the sum above is bounded above (up to a multiplicative constant) by
which is finite as long as \(\beta > \frac{d}{4}\), as we can choose \(\kappa ,\alpha \) to be arbitrarily small together with Weyl’s law. We can then use Markov’s inequality with the product measure \(\textbf{P}\otimes {{\mathbb P}}\), to get that
Applying Theorem 4.4, we conclude the proof.
4.3 Stochastic Homogenization of the bi-Laplacian Field
Let \(\beta > \frac{d}{4}-\frac{1}{2}\), \(\tau >0\), by Markov’s inequality
Let \(\alpha ,\kappa >0\) be small enough so that \(\beta - \frac{\alpha +\kappa }{2} >\frac{d}{4}-\frac{1}{2}\). From the representations (2.11), (2.20), and Lemma 4.2, we conclude that
where in the last inequality, we used Weyl’s law. Again by using Markov’s inequality, we get
taking \(\varepsilon \rightarrow 0\) concludes the proof.
4.4 Proof of Theorem 3.2
The strategy to prove the convergence result on the discrete torus will follow similar ideas as in the continuum. Indeed, we can expand the Green’s function for \({{\,\mathrm{\nabla _N \cdot \textbf{a}_N \nabla _N}\,}}\) in terms of the eigenfunctions of the discrete Laplacian. The advantage, in this case, is that the eigenfunctions are precisely the Fourier basis of \(\ell ^2({\mathbb T}^d_N)\).
Discrete Fourier analysis was also the main tool of previous works on scaling limits of odometer fields, see [8, 10]. In the case of random environments, note that the Fourier basis ceases to be a basis of eigenfunctions for the operator \({{\,\mathrm{\nabla _N \cdot \textbf{a}_N \nabla _N}\,}}\). Again, the key idea is to show that, for large N, the Fourier basis will be close to the basis of eigenvectors.
Let \(g_N \in \ell ^2({\mathbb T}^d_N)\) with \(\sum _{\hat{x}\in {\mathbb T}^d_N} g_N(\hat{x})=0\). Consider \(f_N\) the solution of the equation
The next theorem states good bounds for the difference between \(f_N\) and \(\tilde{f}_N\), the function in \(\ell ^2({\mathbb T}^d_N)\) solving the finite difference equation
where \({{\,\mathrm{\bar{\textbf{a}}}\,}}\) is a positive constant that only depends on the law of \(\textbf{a}\). The next theorem is going to serve as the equivalent of Theorem 4.1 for the discrete context and is a simple adaptation of [18, Corollary 1.2].
Theorem 4.5
(Corollary 1.2, [18]) There exists a deterministic positive constant \( {{\,\mathrm{\bar{\textbf{a}}}\,}}\) only depending on the law of \(\textbf{a}\) and d with the following property. Given \(N \ge 1\) with \(f \in C^\infty ({\mathbb T}^d)\), let \(f_N\) be the solution of (4.18) and \(\tilde{f}_N\) be the solution of (4.19). We have
where \(c_2(N)=\log (N)\) and equal to \(c_d(N)=1\) for \(d \ge 3\).
We will be interested in the case \(g_N=-{{\,\mathrm{\bar{\textbf{a}}}\,}}\lambda ^{(N)}_k \phi ^N_k\), where
are the eigenvalues of the normalized discrete Laplacian operator. Very conveniently, in this case, \(\tilde{f}_N=\phi ^N_k\). In the following lemma, we will denote by \(\varphi ^N_k\) the solution to (4.18).
Now, let us state the representation of the Green’s functions \(G^{N,\textbf{a}}\) defined in (2.26).
Lemma 4.6
For all \(\textbf{a} \in \Omega (\Lambda )\) and any \(N \ge 1\), we have
for all \(\hat{x}, \hat{y}\in {\mathbb T}^d_N\).
This proof is similar to the proof of Lemma 4.3 and will be therefore omitted. It is much simpler as the sum only has a finite number of terms. The next lemma is just an application of Theorem 4.5.
Lemma 4.7
We have that
where \(c_2(N):= \log (N)\) for \(d=2\) and \(c_d(N):=1\) for \(d \ge 3\).
4.5 Stochastic Homogenization of the Discrete Non-homogeneous GFF
The proof is very similar to the proof of Theorem 3.1 (1); hence, we will point out the main differences. We use Theorem 4.4 with \(S=H^{-\beta }_0({\mathbb T}^d)\), with \(\beta > d/4\) and \(X:=\Xi ^g_D\), \(X_{N,K}:=\Xi _{N,K}^{g,\textbf{a}}\) and \(Z_K:= {{\,\mathrm{\bar{\textbf{a}}}\,}}^{-1/2}\Xi ^g_K\), where
and \(a \wedge b:= \min \{a,b\}\), \(\Xi ^{g,\textbf{a}}_{D,N}\) was defined in (2.28) and
The proof of the argument follows similarly but using Lemma 4.7 instead of Lemma 4.2 to prove the convergence of \(\Xi _{N,K}^{g,\textbf{a}}\) to \({{\,\mathrm{\bar{\textbf{a}}}\,}}^{-1/2}\Xi ^{g}_{D,K}\).
4.6 Stochastic Homogenization of the Discrete Non-homogeneous bi-Laplacian Field
Let \(\tau >0\), we want to prove that
Note the trivial identity
For the discrete case, we compare the non-homogeneous field to a discrete homogeneous one. That is, we will first show that \(\Xi ^{b}_{D, N}\) (the homogeneous formal field) converges to \(\Xi _D^{b}\) in probability according to an appropriate Sobolev norm, as long as we choose a suitable coupling between \(\xi \) and \(\xi _N\) in (2.24). For this, we will take \(\xi _N(\hat{x})=N^{d/2}\xi ({{\,\mathrm{\textbf{1}}\,}}_{B_N(\hat{x})})\), where \(\xi \) is the same sample of the noise used in the definition of (2.10), \({{\,\mathrm{\textbf{1}}\,}}_A\) denotes the indicator function of the set A and \(B_N(\hat{x}):=\hat{x}+[-\frac{1}{2N},-\frac{1}{2N}]^d\). Secondly, we prove that \(\Xi _{{{\,\textrm{Err}\,}}}^{b, N}:=\Xi _{D,N}^{b, \textbf{a}}-{{\,\mathrm{\bar{\textbf{a}}}\,}}^{-1}\Xi ^{b}_{D}\) vanishes in this same Sobolev space using estimates given in [18].
We will prove the first point described above in the next proposition.
Proposition 4.8
For all \(\beta >\frac{d}{4}-1\), \(D=\mathbb {T}^d\), we have that
Proof
Again, it will be convenient to study the action of the field on the basis of eigenfunctions of the Laplacian. Remember that, as we are on the torus (both in the discrete and the continuous cases), such basis of eigenfunctions is given by the Fourier basis \(\phi _{k}:= \exp ( 2\pi \iota k\cdot x )\). Let us start by calculating explicitly \(\Xi ^b_{N}(\phi _k)\) for \(k \in {\mathbb Z}^d_N\),
where in the first identity we used that \(\sum _{\hat{z} \in \mathbb {T}^d_N} G^N(\hat{z},\hat{y})=0\) for any \(\hat{y}\). A simple computation shows that (see [9, Lemma 7])
On the other hand, using the expansion of the Green’s function \(G_{{\mathbb T}^d}\) on the torus, we get that \( \Xi ^b_D(\phi _k)= {\lambda _k}^{-1} \xi (\phi _k)\). Notice that we can estimate \(\Vert \phi _k - \tilde{\phi }_k^N\Vert ^2_{L^2({\mathbb T}^d)} \lesssim \frac{\Vert k\Vert ^2}{ N^2}\). Therefore, for \(k \in {\mathbb Z}^d_N{\setminus }\{0\}\), we have
As \(\Xi ^{b}_{D,N}(\phi _k)=0\) if \(k \not \in {\mathbb Z}^d_N\), we get that for any \(\beta \), we have
proving (4.24). \(\square \)
We now proceed to show that \(\Xi _{{{\,\textrm{Err}\,}}}^{b, N}\) converges in probability to 0 in the space \(H^{-\beta }_0(D)\) for \(\beta >\frac{d}{4}-\frac{1}{2}\).
Proposition 4.9
For \(d \ge 2\), as \(N \longrightarrow \infty \), we have
where \(c_d(N)=\log (N)\) for \(d=2\) and \(c_d(N)=1\) otherwise.
Proof
Define a Gaussian vector \((\Xi _{{{\,\textrm{Err}\,}}}^{b, N}(\hat{x}))_{\hat{x} \in {\mathbb T}^d_N}\) by
Call
and remark that here we are committing the same abuse of notation as described in Remark 5.
Let us start by computing \(\Xi _{{{\,\textrm{Err}\,}}}^{b,N} (\phi _k)\), for fixed \(k \in {\mathbb Z}^d\).
Expanding the previous expression, we get
By using Lemma 4.7, we get
\(\square \)
Finally, let \(\beta > \frac{d}{4} - \frac{1}{2}\) and choose \(\kappa >0\) sufficiently small so that \(\beta > \frac{d}{4}- \frac{1}{2} + \frac{\kappa }{2}\), then we have
which vanishes as N goes to infinity.
5 Discussion
In this section, we provide a few remarks regarding possible generalizations and comparison to other results.
5.1 Other Results on Large-Scale Behaviour of Gaussian Fields in Random Environments
In this article, we focused on random environments that took the form of random uniformly elliptic differential operators. Results regarding the maxima of such fields inside of a percolation cluster in dimension 2 were obtained in [33]. On the other hand, the thermodynamic limit and the height fluctuation of (possibly Gaussian) random fields associated to Gibbs measures with random masses are studied in [12, 13].
5.2 Convergence in Probability of the Non-homogeneous GFF
A natural question is whether the convergence of the (non-homogeneous) GFF can be improved to a convergence in probability. For this, we need a coupling in terms of a elliptic PDE which allows us to employ stochastic homogenization techniques. Indeed, there is a natural coupling by writing the desired fields as the solution to PDEs similar to the one found in [17], in which the authors define the notion of generalized Gaussian free field.
Unfortunately, to be able to extract results from such coupling, we would need to obtain a bound similar to the one found in Lemma 4.2 but for the quantity \(\Vert b_{\varepsilon }\nabla \varphi ^\varepsilon _k - \bar{b} \nabla \phi _k\Vert _{L^2(D)}\) where \(b_\varepsilon := \sqrt{\textbf{a}_{\varepsilon }}\) and \(\bar{b}:= \sqrt{\bar{\textbf{a}}}\). This is not expected to converge as \(\varepsilon \) vanishes. Indeed, one can see in [1, 18] that \(\varphi ^\varepsilon _k\) needs the so called first-order correctors in order to converge to its homogenized counter part in \(H^{1}_0(D)\).
5.3 Discretized Domains
In this article, we derive scaling limits in the continuous setting in a domain and for the discrete setting on a torus. However, we do believe that such results could be extended to discretized domains. The proof would require both adapting the techniques of quantitative discrete stochastic homogenization near the boundary. One would also need to account for the fact that the discretized eigenfunctions of the Laplacian cease to be the same as the eigenfunctions of the discretized Laplacian. One should be able to bound such deterministic errors in such context, similarly to [5] where they bound such error for manifolds without boundary.
5.4 General Fractional Fields
We focused in the case of the GFF and bi-Laplacian fields, one could wonder what happens for general fractional Gaussian fields, see [29]. This seem much harder, as one would need to deal with stochastic homogenization for non-local operators, which seems far from the scope of the current available theory of quantitative stochastic homogenization.
5.5 Restricted bi-Laplacian Field
In this article, we used the eigenvalue fractional field definition for the bi-Laplacian field on a domain D. This was particularly important in order to use stochastic homogenization techniques to couple both the homogenized and non-homogeneous versions of the bi-Laplacian field.
One can, however, wonder if it is possible to use the so-called zero-boundary definition of fractional Gaussian fields which is more similar in spirit to our definition of the GFF, i.e, based on covariance functions. However, in this setting, the covariance of the bi-Laplacian field is the Green’s function of the bi-Laplacian operator with Neumann instead of Navier boundary conditions, see Remark 2.
We believe a notion of non-homogeneous bi-Laplacian field would also converge in law (instead of in probability) to a homogeneous one via stochastic homogenization techniques. To do so, one would just need to prove the results we used from [1, 18] in the context of differential operators of order 4.
References
Armstrong, S., Kuusi, T., Mourrat, J.-C.: Quantitative stochastic homogenization and large-scale regularity. Grundlehren der mathematischen Wissenschaften, vol. 352. Springer International Publishing, Cham (2019)
Braides, A., Defranceschi, A.: Homogenization of multiple integrals. Oxford Lecture Series in Mathematics and its Applications, vol. 112. The Clarendon Press, Oxford University Press, New York (1998)
Berestycki, N.: Introduction to the gaussian free field and Liouville quantum gravity. Lecture notes (2016)
Bella, P., Fehrman, B.J., Fischer, J., Otto, F.: Stochastic homogenization of linear elliptic equations: higher-order error estimates in weak norms via second-order correctors. SIAM J. Math. Anal. 49, 4658–4703 (2017)
Burago, D., Ivanov, S., Kurylev, Y.: A graph discretization of the Laplace–Beltrami operator. J. Spectr. Theory 4(4), 675–714 (2015)
Billingsley, P.: Convergence of Probability Measures. John Wiley & Sons, Hoboken (2013)
Bergh, J., Löfström, J.: Interpolation Spaces: An Introduction, vol. 223. Springer Science & Business Media, Berlin (2012)
Cipriani, A., de Graaff, J., Ruszel, W.M.: Scaling limits in divisible sandpiles: a Fourier multiplier approach. J. Theor. Probab. 33, 1–28 (2019)
Cipriani, A., Hazra, R.S., Ruszel, W.M.: Scaling limit of the odometer in divisible sandpiles. Probab. Theory Relat. Fields 172(3), 829–868 (2018)
Chiarini, L., Jara, M., Ruszel, W.M.: Constructing fractional gaussian fields from long-range divisible sandpiles on the torus. Stoch. Process. Appl. 140, 147–182 (2021)
Carbonell, R.G., Whitaker, S.: Heat and mass transfer in porous media. In: Fundamentals of Transport Phenomena in Porous Media, pp. 121–198 (1984)
Dario, Paul: Convergence to the thermodynamic limit for random-field random surfaces (2021). arXiv preprint arXiv:2105.03940
Dario, P., Harel, M., Peled, R.: Random-field random surfaces (2021). arXiv preprint arXiv:2101.02199
Dolzmann, G., Müller, S.: Estimates for green’s matrices of elliptic systems by \(l^p\) theory. Manuscr. Math. 88(1), 261–273 (1995)
Di Nezza, Eleonora, Palatucci, Giampiero, Valdinoci, Enrico: Hitchhiker’s guide to the fractional Sobolev spaces. Bull. des Sci. Math. 136(5), 521–573 (2012)
Funaki, T.: Stochastic interface models. Lectures on probability theory and statistics. Lect. Notes in Math. (2005)
Gu, Y., Mourrat, J.-C.: On generalized gaussian free fields and stochastic homogenization. Electron. J. Probab. 22 (2017)
Gloria, A., Neukamm, S., Otto, F.: An optimal quantitative two-scale expansion in stochastic homogenization of discrete elliptic equations. ESAIM Math. Model. Numer. Anal. 48(2), 325–346 (2014)
Gloria, A., Otto, F.: An optimal variance estimate in stochastic homogenization of discrete elliptic equations. Ann. Probab. 39(3), 779–856 (2011)
Grieser, D.: Uniform bounds for eigenfunctions of the Laplacian on manifolds with boundary. Comm. Partial Differ. Equ. 27(7–8), 1283–1299 (2002)
Grüter, M., Widman, K.-O.: The green function for uniformly elliptic equations. Manuscr. Math. 37(3), 303–342 (1982)
Hairer, M.: Introduction to regularity structures. Braz. J. Probab. Stat. 29(2), 175–210 (2015)
Jurinskii, V.V.: On a dirichlet problem with random coefficients. In: Stochastic Differential Systems Filtering and Control, pp. 344–353. Springer, (1980)
Kenyon, R.: Dominos and the Gaussian free field. Ann. Probab. 29(3), 1128–1137 (2001)
Komorowski, T., Landim, C., Olla, S.: Fluctuations in Markov Processes. In: Grundlehren der Mathematischen Wissenschaften, vol. 345. Springer, Heidelberg (2012)
Kozlov, S.M.: Averaging of random operators. Mat. Sb. 151(2), 188–202 (1979)
Lax, P.D.: Functional Analysis. John Wiley &Sons Inc., Hoboken (2002)
Levine, L., Murugan, M., Peres, Y., Ugurcan, B.E.: The divisible sandpile at critical density. In: Annales Henri Poincaré, pp. 1677–1711 (2016)
Lodhia, A., Sheffield, S., Sun, X., Watson, S.S.: Fractional Gaussian fields: a survey. Probab. Surv. 13, 1–56 (2016)
Papanicolau, G., Varadhan, S.: Boundary value problems with rapidly oscillating random coefficients. vol. 2, pp. 835–873 (1979)
Sapin, P., Gourbil, A., Duru, P., Fichot, F., Prat, M., Quintard, M.: Reflooding with internal boiling of a heating model porous medium with mm-scale pores. Int. J. Heat Mass Transf. 99, 512–520 (2016)
Sun, X., Wu, W.: Uniform spanning forests and the bi-Laplacian gaussian field. arXiv: 1312.0059v1, (2013)
Schweiger, F., Zeitouni, O.: The maximum of log-correlated gaussian fields in random environments. arXiv preprint arXiv:2205.07210, (2022)
Tartar, L.: The General Theory of Homogenization: A Personalized Introduction, vol. 7. Springer-Verlag, Berlin. Lecture Notes of the Unione Matematica Italiana (2009)
Taylor, J.L., Kim, S., Brown, R.M.: The green function for elliptic systems in two dimensions. Comm. Partial Differ. Equ. 38(9), 1574–1600 (2013)
Vazquez, J.L.: The Porous Medium Equation: Mathematical theory. Oxford University Press, Oxford (2007)
Acknowledgements
The authors would like to thank Jean-Christophe Mourrat, Alessandra Cipriani and Rajat Hazra for fruitful conversations and for providing useful references for this article.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Christian Maes.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Chiarini, L., Ruszel, W.M. Stochastic Homogenization of Gaussian Fields on Random Media. Ann. Henri Poincaré 25, 1869–1895 (2024). https://doi.org/10.1007/s00023-023-01347-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00023-023-01347-5