
Abstract
We prove that Ceva’s and Menelaus’ theorems are valid in a projective-metric space if and only if the space is any of the elliptic geometry, the hyperbolic geometry, or the Minkowski geometries.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In this short note, first we give appropriately unified versions of the known theorems of Menelaus, resp. Ceva for constant curvature planes.
Then we prove that these unified versions are not valid for other projective-metric spaces. Eventually, we conclude in Theorems 4.1 and 4.2 that among the projective-metric spaces the unified versions of Ceva’s and Meneleus’ theorems are valid only in the elliptic geometry, the hyperbolic geometry, and the Minkowski geometries.
2 Notations and preliminaries
Points of \({\mathbb {R}}^n\) are denoted as \(A,B,\ldots \), vectors are \(\overrightarrow{AB}\) or \({{\varvec{a}}} , {{\varvec{b}}} , \ldots \). Latter notations are also used for points if the origin is fixed. Open segment with endpoints A and B is denoted by \({\overline{AB}}\), \({\overline{A}}B\) is the ray starting from A passing through B, and the line through A and B is denoted by AB. The Euclidean scalar product is \(\langle \cdot ,\cdot \rangle \).
We interpret the ratio of two directional vectors of a straight line as the constant needed to multiply the denominator to get the nominator. The affine ratio (A, B; C) of the collinear points A, B and \(C\ne B\) is therefore \((A,B;C)=\overrightarrow{AC}/\overrightarrow{CB}\). The affine cross ratio of the collinear points A, B, \(C\ne B\), and \(D\ne A\) is \((A,B;C,D)=(A,B;C)/(A,B;D)\) [1, p. 243].
Let \(({\mathcal {M}},d)\) be a metric space given in a set \({\mathcal {M}}\) with the metric d. If \({\mathcal {M}}\) is a projective space \(\mathbb P^n\) or an affine space \({\mathbb {R}}^n\subset \mathbb P^n\) or a proper open convex subset of \({\mathbb {R}}^n\) for some \(n\in \mathbb N\), and the metric d is complete, continuous with respect to the standard topology of \(\mathbb P^n\), and the geodesic lines of d are exactly the non-empty intersection of \({\mathcal {M}}\) with the straight lines, then the metric d is called projective.
If \({\mathcal {M}}=\mathbb P^n\), and the geodesic lines of d are isometric with a Euclidean circle; or \({\mathcal {M}}\subseteq {\mathbb {R}}^n\), and the geodesic lines of d are isometric with a Euclidean straight line, then \(({\mathcal {M}},d)\) is called a projective-metric space of dimension n (see [1, p. 115] and [6, p. 188]). Such projective-metric spaces are called of elliptic, parabolic or hyperbolic type according to whether \({\mathcal {M}}\) is \(\mathbb P^n\), \({\mathbb {R}}^n\), or a proper convex subset of \({\mathbb {R}}^n\). The projective-metric spaces of the latter two types are called straight [2, p. 1].
The geodesics of a projective-metric space of elliptic type have equal lengths, so we can set their length to \(\pi \) by simply multiplying the projective metric with an appropriate positive constant. Therefore we assume from now on that
If A, B are different points in \({\mathcal {M}}\), and \(C\in (AB\cap {\mathcal {M}})\setminus \{B\}\), then the real number
is called the metric ratio of the triple (A, B, C). In Minkowski geometries this coincides with the affine ratio.
To find and prove an appropriate unified version of Ceva’s and Menelaus’ theorems in constant curvature spaces, we use the projector map \(\tilde{\mu }\) which projects a point given in polar coordinates \(({{\varvec{u}}},r)\) at a point O in the constant curvature space \(\mathbb K^n\) to the point \(({{\varvec{u}}},\mu (r))\) given in polar coordinates of the tangent space \(T_O\mathbb K^n\). The projector function \(\mu \) is given in the table

where \(\kappa \) is the curvature, \(\nu \) is the so-called size function giving the isometry factor between the geodesic sphere of radius r and the Euclidean sphere of radius \(\nu (r)\) (see [3]).
Let A, B be different points in a projective-metric space \(({\mathcal {M}},d)\), and let \(C\in (AB\cap {\mathcal {M}})\setminus \{B\}\). Then the real number
is called the size-ratio of the triplet (A, B, C), where \(\nu \) is the size function of the hyperbolic, Euclidean, or elliptic space according to the type of \(({\mathcal {M}},d)\).
Observe that for constant curvature spaces a size-ratio \(\langle A,B;C\rangle _{d}^\circ \) is nothing else but the affine ratio of the orthogonal projections of the points into the tangent space \(T_C\mathbb K^n\).
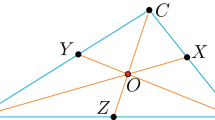
Notation \(ABC\triangle \) means the triangle with vertices A, B, C. Non-degenerate triangles are called trigons,
By a triplet (Z, X, Y) of the trigon \(ABC\triangle \) we mean three points Z, X and Y being respectively on the straight lines AB, BC and CA [4]. A triplet (Z, X, Y) of the trigon \(ABC\triangle \) is
-
(p1)
of Menelaus type if the points Z, X and Y are collinear, and
-
(p2)
f Ceva type if the lines AX, BY and CZ are concurrent.
A triple \((\alpha ,\beta ,\gamma )\) of real numbers is
-
(n1)
of Menelaus type if \(\alpha \cdot \beta \cdot \gamma =-1\), and
-
(n2)
of Ceva type if \(\alpha \cdot \beta \cdot \gamma =+1\).
We say that a projective-metric space has the Menelaus property or the Ceva property if for every triplet (Z, X, Y) of every trigon \(ABC\triangle \) is of Menelaus type or of Ceva type, respectively, if and only if the triple \((\langle A ,B ;Z \rangle _{d}^\circ , \langle B ,C ;X \rangle _{d}^\circ , \langle C ,A ;Y \rangle _{d}^\circ )\) is of Menelaus type or of Ceva type, respectively.
With these terms, we can reformulate the known results [5].
Theorem 2.1
Constant curvature spaces have the Menelaus and Ceva properties.
It is known [4] that non-hyperbolic Hilbert geometries do not have even quite weak versions of the Ceva or Menelaus properties.
3 The Ceva and Menelaus properties
Lemma 3.1
If a projective-metric space \(({\mathcal {M}},d)\) has the Ceva property, then for any four collinear points A, R, Z, Q, B in order \(A\prec R\prec Z\prec Q\prec B\) that satisfies \((Z,A;R)(B,Z;Q)(A,B;Z)=1\) we have
Proof
Let \(\nu \) be the appropriate size function of \(({\mathcal {M}},d)\).
If \(({\mathcal {M}},d)\) is of elliptic type, then let us cut out a projective line and consider the remaining part with the inherited metric (this is a restriction of d so we denote it with the same letter d). This way we can consider the trigons in an affine plane independently of the type of \(({\mathcal {M}},d)\).
Let us take a segment \({\overline{AZ}}\) and a point C out of line AZ. Let the point \(B\in {\overline{AZ}}\) be such that \((A,B;Z)=(Z,A;R)\), let \(X\in {\overline{BC}}\) be such that \((B,C;X)=(B,Z;Q)\), and let \(Y\in {\overline{CA}}\) be such that \((C,A;Y)=(Z,A;R)\).
Then the affine Ceva theorem proves that segments \({\overline{AX}}\), \({\overline{BY}}\) and \({\overline{CZ}}\) intersect each other in a common point, say M. As \(({\mathcal {M}},d)\) has the Ceva property, this means

Map trigon \(ABC\triangle \) continuously into the degenerate triangle \(AZB\triangle \) via the axial affinity with axis CZ and moving point C along the segment \({\overline{CZ}}\). That is, \(C\rightarrow Z\), \(X\rightarrow Q\), and \(Y\rightarrow R\). Then, as d and \(\nu \) are continuous functions, we obtain (3.1) from (3.2). \(\square \)
Using the additivity of metric d, Lemma 3.1 can be written in the equivalent form
for collinear points \(A\!\prec R\!\prec Z\!\prec Q\!\prec B\).
Lemma 3.2
If a projective-metric space \(({\mathcal {M}},d)\) has the Menelaus property, then for any four collinear points Q, Y, X, R, Z in order \(Q\prec Y\prec X\prec R\prec Z\) that satisfies \((X,R;Z)(R,Q;X)(Q,X;Y)=-1\) we have
Proof
Let \(\nu \) be the appropriate size function of \(({\mathcal {M}},d)\).
If \(({\mathcal {M}},d)\) is of elliptic type, then let us cut out a projective line and consider the remaining part with the inherited metric (this is a restriction of d so we denote it with the same letter d). This way we can consider the trigons in an affine plane independently of the type of \(({\mathcal {M}},d)\).
Let us take a segment \({\overline{AZ}}\) and a point C out of line AZ. Let the point \(B\in {\overline{AZ}}\) be such that \((A,B;Z)=(X,R;Z)\), let \(X\in {\overline{BC}}\) be such that \((B,C;X)=(R,Q;X)\), and let \(Y\in {\overline{CA}}\) be such that \((C,A;Y)=(Q,X;Y)\).
Then the affine Menelaus theorem proves that points X, Y and Z lay on a common straight line, say m. As \(({\mathcal {M}},d)\) has the Menelaus property, this means

Map trigon \(ABC\triangle \) continuously into the degenerate triangle \(XRQ\triangle \) via the axial affinity with axis XY and moving point A along the segment \({\overline{AX}}\). That is, \(C\rightarrow Q\), \(B\rightarrow R\), and \(A\rightarrow X\). Then, as d and \(\nu \) are continuous functions, we obtain (3.4) from (3.5). \(\square \)
Using the additivity of metric d, Lemma 3.2 can be written in the equivalent form
for collinear points \(Q\prec Y\prec X\prec R\prec Z\).
Relabeling the points \(Q\prec Y\prec X\prec R\prec Z\) as \(Q\mapsto B\), \(Y\mapsto Q\), \(X\mapsto Z\), \(R\mapsto R\), and \(Z\mapsto A\) shows that (3.6) is equivalent to (3.3).
Theorem 3.3
A projective-metric space of elliptic type satisfies (3.3) if and only if it is the elliptic geometry.
Proof
We have \(\nu (\cdot )=\sin (\cdot )\). Let the linear function \(P:{\mathbb {R}}\rightarrow RQ\) be such that \(Z=P(0)\), \(A=P(a)\), \(R=P(r)\), \(Q=P(q)\), \(B=P(b)\), and \(a<r<0<q<b\). Further, let \(\ell :RQ\rightarrow {\mathbb {R}}\) be such that \(\ell (s)=\sin (d(P(s),Z))\).
Using the coordinates in function P, the addition formulas for functions sine and \(\ell \), (3.3) give
After some easy simplifications this shows
Fixing points R and Z, and letting \(b\rightarrow \infty \) and \(a\rightarrow -\infty \), implies that \(q\rightarrow -r\) by the left-hand equation of (3.7). From the right-hand equation of (3.7) we get that \(\cot (d(Z,Q))=\cot (d(R,Z))\), hence \(d(Z,Q)=d(R,Z)\). Thus, \(q=-r\) is equivalent to \(d(Z,Q)=d(R,Z)\), hence \(\ell \) is an even function.
Let function \(f:{\mathbb {R}}\rightarrow {\mathbb {R}}_+\) be defined by \(f(x):=\cot (d(Z,P(x)))\). Then (3.7) reads as
Putting \(r=-b\) (hence accepting \(a<-b\) too!), this gives \( f\big (\frac{ab}{2a+b}\big ) =2f(b)-f(a), \) because f is an even function due to the evenness of \(\ell \). Define
which is an odd function. Then, as \(2a+b<a<0<b\), we get
For the moment let \(b=-a/2\). Then (3.8) gives \(g\big (\frac{-3}{a}\big ) =2g\big (\frac{-2}{a}\big )+g\big (\frac{1}{a}\big )\). So \(g(0)=0\) follows from \(a\rightarrow -\infty \) by the continuity of g. Now, \(a\rightarrow -\infty \) in (3.8) gives by the continuity of g that \(g({2}/{b})=2g({1}/{b})\). Substituting this into (3.8) we arrive at Cauchy’s functional equation [7] for the continuous function g, so we obtain that \(g(x)=cx\) for some \(c>0\) and every x. By the definition of g and f this gives \(d(P(s),P(0))=|\arctan (cs)|\) which implies \(c=1\), and so the theorem. \(\square \)
Theorem 3.4
A projective-metric space of parabolic type satisfies (3.3) if and only if it is a Minkowski geometry.
Proof
Now, we have \(\nu (\cdot )=\cdot \). Let the linear function \(P:{\mathbb {R}}\rightarrow RQ\) be such that \(Z=P(0)\), \(A=P(a)\), \(R=P(r)\), \(Q=P(q)\), \(B=P(b)\), and \(a<r<0<q<b\). Further, let \(\ell :RQ\rightarrow {\mathbb {R}}\) be such that \(\ell (s)=d(P(s),Z)\).
Using the coordinates in function P, (3.3) gives
After some easy simplifications this shows
Fix R and Z, and let \(a\rightarrow -\infty \) and \(b\rightarrow \infty \). Then (3.9) gives
hence the affine and the d-metric midpoint of any segment coincide. So, according to Busemann [2, page 94], d is a Minkowski metric. \(\square \)
Theorem 3.5
A projective-metric space of hyperbolic type satisfies (3.3) if and only if it is a Hilbert geometry.
Proof
This time, we have \(\nu (\cdot )=\sinh (\cdot )\). Let the linear function \(P:{\mathbb {R}}\rightarrow RQ\) be such that \(Z=P(0)\), \(A=P(a)\), \(R=P(r)\), \(Q=P(q)\), \(B=P(b)\), and \(a<r<0<q<b\). Further, let \(\ell :RQ\rightarrow {\mathbb {R}}\) be such that \(\ell (s)=\sinh (d(P(s),Z))\).
Using the coordinates in function P, the addition formulas for functions hyperbolic sine and \(\ell \), (3.3) gives
After some easy simplifications this shows
The intersection of a straight line and the domain \({\mathcal {M}}\) can be of three types: a whole affine line AB, a ray \(\overline{A_\infty }B\), or a segment \(\overline{A_\infty B_\infty }\). Now we consider these cases one after another.
Fixing points R and Z on the affine line AB, and letting \(b\rightarrow \infty \) and \(a\rightarrow -\infty \), implies that \(q\rightarrow -r\) by the left-hand equation of (3.7). From the right-hand equation of (3.7) we get that \(\coth (d(Z,Q))=\coth (d(R,Z))\), hence \(d(Z,Q)=d(R,Z)\). Thus, \(q=-r\) is equivalent to \(d(Z,Q)=d(R,Z)\), hence \(\ell \) is an even function. Moreover, the map \(\rho _{d;e;z}:P(z-x)\leftrightarrow P(z+x)\) is a d-isometric point reflection of e for every \(P(z)\in e\), hence
is a d-isometric translation. So \(d(P(x),P(y))=d(P(0),P(y-x))\), hence
Thus the continuous function \(f(x)=d(P(0),P(x))\) satisfies Cauchy’s functional equation [7], hence a constant \(c_e>0\) exists such that \(d(P(x),P(y))=c_e|x-y|\) for every \(x,y\in {\mathbb {R}}\).
Fixing points R and Z on the ray \(e=\overline{A_\infty }B\), where \(A_\infty =P(a_\infty )\), and letting \(b\rightarrow \infty \) and \(a\rightarrow a_\infty \), implies that
by (3.10). Reparameterizing ray e by the linear map \({\bar{P}}:{\mathbb {R}}\rightarrow RQ\) such that \(A_\infty ={\bar{P}}(0)\), \(R={\bar{P}}(r)\), \(Z={\bar{P}}(z)\), \(Q={\bar{P}}(q)\), we can reformulate the equivalence in (3.11) to
where \(0<r<z<q\). Thus, the map \(\rho _{d;e;z}:\bar{P}(r)\leftrightarrow \bar{P}(z^2/r)\) is a d-isometric point reflection on ray e for every \(\bar{P}(z)\in e\), hence
is a d-isometric translation. So \(d(\bar{P}(r),\tau _{d;e;z,t}(\bar{P}(r)))\) does not depend on r, hence it is a real function \(\delta \) of t / z. As d is additive, this implies \(\delta (x)+\delta (y)=\delta (xy)\), so by the solution of Cauchy’s functional equation [7] we have a constant \({\bar{c}}_e>0\) such that \(\delta (x)=2c_e|\ln (x)|\), hence for every \(x,y\in {\mathbb {R}}\) we have
This is the Hilbert metric \(d(\bar{P}(x),\bar{P}(y))={\bar{c}}_e|\ln (A_\infty ,\infty ;\bar{P}(y),\bar{P}(x))|\) on ray e.
Fixing points R and Z on the segment \(e=\overline{A_\infty B_\infty }\), where \(A_\infty =P(a_\infty )\) and \(B_\infty =P(b_\infty )\), and letting \(b\rightarrow b_\infty \) and \(a\rightarrow a_\infty \), implies that
by (3.10). Reparameterizing segment e by the linear map \({\bar{P}}:{\mathbb {R}}\rightarrow RQ\) such that \({A}_\infty ={\bar{P}}(0)\), \(R={\bar{P}}(r)\), \(Z={\bar{P}}(z)\), \(Q={\bar{P}}(q)\), and \({B}_\infty =\overline{P}(1)\) we can reformulate the equivalence in (3.11) to
where \(0<r<z<q<1\). Thus, the map \(\rho _{d;e;z}:\bar{P}(r)\leftrightarrow \bar{P}\big (\frac{z^2(1-r)}{z^2-r(2z-1)}\big )\) is a d-isometric point reflection on segment e for every \(\bar{P}(z)\in e\), hence
is a d-isometric translation. So \(d(\bar{P}(r),\tau _{d;e;z,t}(\bar{P}(r)))\) does not depend on r, hence it is a real function \(\delta \) of \(\frac{z^2}{(1-z)^2}\frac{(1-t)^2}{t^2}\). As d is additive, this implies \(\delta (x)+\delta (y)=\delta (xy)\) so by the solution of Cauchy’s functional equation [7] we have a constant \({\bar{c}}_e>0\) such that \(\delta (x)=2{\bar{c}}_e|\ln (x)|\), hence
This is \(d(\bar{P}(x),\bar{P}(y))={\bar{c}}_e|\ln (A_\infty ,B_\infty ;\bar{P}(y),\bar{P}(x))|\), i.e. a Hilbert metric on segment e.
Having the metric for every possible domain of a projective-metric space of hyperbolic type, we are ready to step forward by considering the properties of the domain \({\mathcal {M}}\).
If \({\mathcal {M}}\) contains a whole affine line, then by [1], Exercise [17.8]] it is either a half plane or a strip bounded by two parallel lines, because it is not the whole plane. Thus, \({\mathcal {M}}\) is either \({\mathcal {P}}_{(0,\infty )}:=\{(x,y)\in {\mathbb {R}}^2: 0<x\}\) or \({\mathcal {P}}_{(0,b)}:=\{(x,y)\in {\mathbb {R}}^2: 0<x<b\}\) in suitable linear coordinates. As the perspective projectivity \(\varpi :(x,y)\mapsto \big (\frac{x}{x+1},\frac{y}{x+1}\big )\) maps \({\mathcal {P}}_{(0,\infty )}\) onto \({\mathcal {P}}_{(0,1)}\) bijectively, it is enough to consider the case \({\mathcal {M}}={\mathcal {P}}_{(0,1)}\).
By the above, we know about the metric that \( d((x,y),(x,z))=c(x)|z-y| \) for a continuous function \(c:(0,1)\rightarrow {\mathbb {R}}_+\), and
where \({\bar{c}}:{\mathbb {R}}\times {\mathbb {R}}_+\rightarrow {\mathbb {R}}_+\) is also a continuous function. Putting these together gives
for every \(x,s\in (0,1)\) and \(y\in {\mathbb {R}}\). For \(y=k(s-x)>0\), where \(k\ge 0\), this gives
Thus \(0\!=\!\lim _{k\rightarrow 0}{\bar{c}}(-kx,k) \), hence continuity implies \({\bar{c}}(0,0)=0\), a contradiction.
Thus \({\mathcal {M}}\) does not contain a whole affine line, hence it is either bounded or contains some rays. Then the metric on every chord \(\ell \cap {\mathcal {M}}\) is of the form \(c_\ell \delta \), where \(\delta \) is the Hilbert metric on \({\mathcal {M}}\). Multiplier \(c_\ell \) depends from \(\ell \) continuously, because d and \(\delta \) are continuous. Given non-collinear points \(A,B,C\in {\mathcal {M}}\) the strict triangle inequality gives that \(|\delta (A,C)-\delta (B,C)|<\delta (A,B)\) and
These imply
If C tends to a point \(\infty \) on the boundary \(\partial {\mathcal {M}}\) of \({\mathcal {M}}\), then the first inequality implies \(\frac{\delta (A,C)}{\delta (B,C)}\rightarrow 1\), so from the second inequality \(c^{}_{A\infty }=c^{}_{B\infty }\) follows. Thus \(c_\ell \) is the same for every line with common point on \(\partial {\mathcal {M}}\). This clearly implies that \(c_\ell \) does not depend on \(\ell \), i.e. constant, hence \(({\mathcal {M}},d)\) is a Hilbert geometry.\(\square \)
4 The Ceva and Menelaus properties are characteristic
In sum, the results in the previous section prove the following main result of this paper.
Theorem 4.1
A projective-metric space has the Ceva property if and only if it is a Minkowski geometry, or the hyperbolic geometry, or the elliptic geometry.
Proof
Lemma 3.1 and the theorems in the previous section imply that a projective-metric space which has the Ceva property can only be either the elliptic geometry, or a Minkowski geometry, or a Hilbert geometry. However, [4, Theorem 3.1] proves that a Hilbert geometry which has the Ceva property is hyperbolic. \(\square \)
Theorem 4.2
A projective-metric space has the Menelaus property if and only if it is either a Minkowski geometry, or the hyperbolic geometry, or the elliptic geometry.
Proof
Lemma 3.2 and the theorems in the previous section imply that a projective-metric space that has the Meneleus property can only be either the elliptic geometry, or a Minkowski geometry, or a Hilbert geometry. However, [4, Theorem 3.2] proves that a Hilbert geometry which has the Menelaus property is hyperbolic. \(\square \)
5 Discussion
The results of Sect. 4 show that neither Ceva’s nor Menelaus’ theorems can have common forms for projective-metric spaces except the elliptic geometry, the hyperbolic geometry, and the Minkowski geometries. Therefore to keep versions of Ceva’s or Menelaus’ theorems valid in more projective-metric spaces one needs to allow more freedom for the ratios.
Let A, B be different points in a projective-metric space \(({\mathcal {M}},d)\), and let \(C\in (AB\cap {\mathcal {M}})\setminus \{B\}\). Then the real number
is called the \(\lambda \)-ratio of the triplet (A, B, C), where \(\lambda \) is a non-negative strictly increasing function of the positive real numbers.
The question arises whether a projective-metric space exists on which Ceva’s or Menelaus’ theorems are valid with a \(\lambda \)-ratio. We show that the answer to this question for the Hilbert geometries \(({\mathcal {M}},d)\) is negative. For, just choose five points on \(\partial {\mathcal {M}}\), and fit an ellipse \({\mathcal {E}}\) through these points. Then \({\mathcal {E}}\) intersects \(\partial {\mathcal {M}}\) in at least six points in a circumcise order \(M_1,M_2,M_3,M_4,M_5,M_6\). The chords \(\overline{M_1M_4}\), \(\overline{M_2M_5}\), and \(\overline{M_3M_6}\) in general intersect each other in three points, say in A, B, and C. Now, on the side-lines of trigon \(ABC\triangle \) the hyperbolic metric is given, hence Ceva’s and Menelaus’ theorems are valid with \(\lambda (\cdot )\equiv \sinh (\cdot )\). For the hyperbolic geometry only the hyperbolic sine function is a good choice, and we know from the results of the previous section that it just does not work for more general Hilbert geometries.
References
Busemann, H., Kelly, P.J.: Projective Geometries and Projective Metrics. Academic Press, New York (1953)
Busemann, H.: The Geometry of Geodesics. Academic Press, New York (1955)
Kurusa, Á.: Support theorems for totally geodesic radon transforms on constant curvature spaces. Proc. Am. Math. Soc. 122(2), 429–435 (1994). https://doi.org/10.2307/2161033
Kozma, J., Kurusa, Á.: Ceva’s and Menelaus’ theorems characterize the hyperbolic geometry among Hilbert geometries. J. Geom. 106(3), 465–470 (2015). https://doi.org/10.1007/s00022-014-0258-7
Masal’tsev, L.A.: Incidence theorems in spaces of constant curvature. J. Math. Sci. 72(4), 3201–3206 (1994). https://doi.org/10.1007/BF01249519
Szabó, Z.I.: Hilbert’s fourth problem. I. Adv. Math. 59(3), 185–301 (1986). https://doi.org/10.1016/0001-8708(86)90056-3
Wikipedia: https://en.wikipedia.org/wiki/Cauchy’s_functional_equation. Accessed 01 Feb 2019
Acknowledgements
This research was supported by NFSR of Hungary (NKFIH) under Grant numbers K 116451 and KH_18 129630, and by the Ministry of Human Capacities of Hungary grant 20391-3/2018/FEKUSTRAT. Open access funding provided by University of Szeged Open Access Fund under grant number 4322.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Kurusa, Á. Ceva’s and Menelaus’ theorems in projective-metric spaces. J. Geom. 110, 39 (2019). https://doi.org/10.1007/s00022-019-0495-x
Received:
Revised:
Published:
DOI: https://doi.org/10.1007/s00022-019-0495-x