
Abstract
The attitude control of a rotating satellite with two control jets leads to a system of four controlled ordinary differential equations of the form
Our goal is to derive feedback controlsu 1,u 2 which automatically stabilize the system (S), i.e., drive the solution to the (uncontrolled) rest solution zero. Let
the Lie product of the vector fieldsX, Y, and inductively
It is known that, if
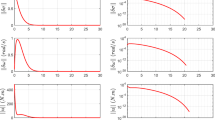
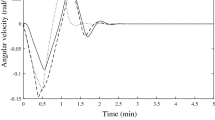
then all points in some neighborhood of zero can be controlled to zero with just the controlu 1, i.e.,u 2≡0. In this problem,Y 1(0), ..., (ad 3 X, Y 1)(0) are linearly independent. We give a formula for generating the directions (ad i X, Y i)(0) as endpoints of admissible trajectories. Our modified feedback control is then formed as follows. Given an ε>0, if the state of system (S) is measured to beq 1 ∈ ℝ4, we write
and choose a controlu(t,q 1) on the interval 0≤t≤ε to drive the solution in the direction
Thus, we assume that the state is measured (say) at time intervals 0, ε, 2ε, ..., while the control depends on the measured state, but then is open loop during a time interval ε until a new state is measured; hence, the terminologymodified feedback control. Numerical results are included for both the case of one control component and the case of two control components.
Similar content being viewed by others

References
Hermes, H.,On Local and Global Controllability, SIAM Journal on Control, Vol. 12, pp. 252–261, 1974.
Hermes, H.,On the Synthesis of a Stabilizing Feedback Control Via Lie Algebraic Methods, SIAM Journal on Control and Optimization (to appear).
Author information
Authors and Affiliations
Additional information
Communicated by L. D. Berkovitz
This research was supported by the National Science Foundation under Grant No. MCS-76-04419-A01.
Rights and permissions
About this article
Cite this article
Hermes, H. On a stabilizing feedback attitude control. J Optim Theory Appl 31, 373–384 (1980). https://doi.org/10.1007/BF01262979
Issue Date:
DOI: https://doi.org/10.1007/BF01262979