
Abstract
I develop a framework to analyze the robust emissions tax policy for a stock pollutant when the environmental authority is not fully confident about its estimated model of pollution dynamics and, in contrast to previous research, the degree of model mistrust may change over time. I characterize the effect of time-varying model mistrust on emission taxes, pollution stocks and welfare. The general results of this paper show that introducing the possibility of a time-varying degree of model mistrust produces different emission taxes, abatement and welfare compared to the traditional assumption of a time-fixed model mistrust. This result holds even if the probability that the model mistrust may change in the future is small. If the environmental authority expects that the model uncertainty may decrease in the future then current emissions taxes should also decrease. Conversely, if the model mistrust may increase in the future then an active approach compatible with the Precautionary Principle is optimal and current emissions taxes should also increase.



Similar content being viewed by others

Notes
The model and the solution method can be extended to a N number of regimes.
Hansen and Sargent (2008) show that the timing of the protocols does not change the solution. That is, the solution of the sequential game is equivalent to solving a simultaneous game. Moreover, the sequence of the moves between the nature and the environmental authority do not affect the solution.
\(\underline{\theta }\) is also known as the breakdown down point in \(H_{\infty }\).
In the case of \(i,j=1\ldots N\), the policy maker problem is expressed as solving N intertwined Bellman equations. When a regime is absorbing the Bellman equation and solution for that regime (presented in the next section) is unrelated to the other regime.
In this case, extremizing (ext) refers to minimizing the welfare losses with respect to emissions taxes, \(M_{t, {i}}\), and maximizing it with respect to \(\omega _{t+1, {i}}\).
The constraint given by Eq. (10) is already incorporated in the criterion function.
This discount factor corresponds to a continuous discount rate of 3 % (\(\delta =0.97=e^{-0.03}\)), which is commonly used in policy analysis. For example, the EPA (2010) recommends the use of 2–3 % annual discount rates. A different discount factor will affect the level of the steady state solutions but the main findings of this paper will not be affected.
The choice of \(\theta _1\) as adjustment is arbitrary but does not affect any of the conclusions in the paper. Similar results for the same \(\pi \) are obtained if \(\theta _2\) is adjusted and \(\theta _1\) is kept constant or if both of \(\theta _1\) and \(\theta _2\) are adjusted. Keeping one \(\theta \) constant across all solutions is done for computational ease.
The contour graphs for \(\pi =20\,\%\) follow the same pattern as those in Fig. 1 for the respective variable. These graphs can be obtained from the author upon request.
Overall model uncertainty is constant within each figure and between the rows of the table.
Zampolli’s (2006) analysis of the losses differs in that he computes the sum of the losses from a specific value of p in a given range of \(\hat{p}\). The main result does not change under this methodology: the environmental authority always obtains lower losses by choosing the highest transition probability to the pessimistic regime in the \(\hat{p}\) range. The step-by-step procedure, matlab implementation and full set of numerical results can be obtained from the author upon request.
The Matlab implementation can be obtained form the author upon request.
References
Anderson, E., William, B., Hansen, L. P., & Sanstad, A. H. (2014). Robust analytical and computational explorations of coupled economic-climate model with carbon-climate response. The Center for Robust Decision Making on Climate and Energy Policy, working paper 13-05.
Athanassoglou, S., & Xepapadeas, A. (2012). Pollution control with uncertain stock dynamics: When, and how, to be precautious. Journal of Environmental Economics and Management, 63, 304–320.
Crepin, A. S., Biggs, R., Polasky, S., Troell, M., & de Zeeuw, A. (2012). Regime shifts and management. Ecological Economics, 84(15), 22.
de Zeeuw, A., & Zemel, A. (2012). Regime shifts and uncertainty in pollution control. Journal of Economic Dynamics and Control, 36, 939–950.
Environmental Protection Agency (EPA). (2010). Guidelines for preparing economic analysis. Washington, DC: National Center for Environmental Economics, Office of Policy.
Funke, M., & Paetz, M. (2011). Environmental policy under model uncertainty: A robust optimal control approach. Climatic Change, 107, 225–239.
Gilboa, I., & Schmeidler, D. (1989). Maxmin expected utility with non-unique prior. Journal of Mathematical Economics, 18, 141–153.
Gollier, C., Jullien, B., & Treich, N. (2000). Scientific progress and irreversibility: An economic interpretation of the precautionary principle. Journal of Public Economics, 75, 229–253.
Gonzalez, F. (2008). Precautionary principle, robustness and optimal taxes for a stock pollutant with multiplicative risk. Environmental and Resource Economics, 41(1), 25–46.
Gonzalez, F., & Rodriguez, A. (2013). Monetary policy under time-varying uncertainty aversion. Computational Economics, 41(1), 125–150.
Herrnstadt, E., & Muehlegger, E. (2014). Weather, salience of climate change and congressional voting. Journal of Environmental Economics and Management, 68, 435–448.
Hansen, L. P., & Sargent, T. J. (2008). Robustness. Princeton: Princeton University Press.
Hoel, M., & Karp, L. (2001). Taxes versus quotas for a stock pollutant with multiplicative uncertainty. Journal of Public Economics, 82, 91–114.
Kendrick, D. (1981). Stochastic control for economic models. New York: McGraw-Hill.
Klibanoff, P., Marinacci, M., & Mukerji, S. (2005). A smooth model of decision making under ambiguity. Econometrica, 73, 1849–1892.
Klibanoff, P., Marinacci, M., & Rustichini, F. (2006). Ambiguity aversion, robustness, and the variational representation of preferences. Econometrica, 74, 1447–1498.
Lang, C. (2014). Do weather fluctuations cause people to seek information about climate change? Climatic Change, 125(3), 291–303.
Millner, A., Dietz, S., & Heal, G. (2013). Scientific ambiguity and climate policy. Environmental and Resource Economics, 55(1), 21–46.
Polasky, S., de Zeeuw, A., & Wagener, F. (2011). Optimal management with potential regime shifts. Journal of Environmental Economics and Management, 62, 229–240.
Roseta-Palma, C., & Xepapadeas, A. (2004). Robust control in water management. Journal of Risk and Uncertainty, 29, 21–34.
Vardas, G., & Xepapadeas, A. (2010). Model uncertainty, ambiguity and the precautionary principle: Implications for biodiversity management. Environmental and Resource Economics, 45, 379–404.
Zampolli, F. (2006). Optimal monetary policy in a regime-switching economy: The response to abrupt shifts in exchange rate dynamics. Journal of Economic Dynamics and Control, 30, 1527–1567.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Choice of \(\theta _1\) and \(\theta _2\)
As mentioned in the main text, the environmental authority’s degree of mistrust about its own model has to come from outside the model in each regime. In Eq. (11) I narrow down the possible values of \(\theta _{t+1, 1}\) and \(\theta _{t+1, 2}\). The goal of this Appendix is to satisfy Eq. (11) by simultaneously finding numerical values of \(\theta _{t+1, 1}\) and \(\theta _{t+1, 2}\) that represent an environmental authority that is optimistic about its estimated model of pollution concentration dynamics in regime 1 and pessimistic in regime 2.
I follow with some differences the procedure outlined in Gonzalez and Rodriguez (2013) that adapts Hansen and Sargent’s (2008) detection error probability approach to include Markov switching and simultaneously choose \(\theta _{t+1, 1}\) and \(\theta _{t+1, 2}\).Footnote 13 I consider two models: the original non-robust model without model uncertainty (given by Eqs. 6–7) and the time-varying model uncertainty model at the end of Sect. 2.4. The procedure consists of finding values of \(\theta _{{t+1, 1}}\) and \(\theta _{{t+1, 2}}\) for which it is statistically difficult to distinguish between the original and the time-varying model in regime 1 and that also satisfy Eq. (11).
First, I obtain the solution for the pollution stock in the original non-robust model:
where \(\ddot{k}=(\alpha + \beta \ddot{F})\) and \(\ddot{H}= \beta \ddot{f} + \bar{x}\). Similarly, I obtain the solution for the pollution stock in the time-varying model:
where \(k_i=(\alpha + { \widetilde{\mathbf{B}}} \mathbf{F}_i)\) and \(H_i=({ \widetilde{\mathbf{B}} }f _i + \bar{x}) \). Next, I define the time-varying model in regime 1 as follows:
The worst-case shock assuming that the pollution stock was generated by the original model is given by:
The worst-case shock assuming that the pollution stock was generated by the time-varying model is then:
The log-likelihood ratio under the original model is then:
The log-likelihood ratio under the time-varying model is then:
I produce 200 random draws over \(\ddot{\varepsilon }_{t+1}\) and \(\breve{\varepsilon }_{t+1}\) and use Eqns. (35) and (37) above to simulate 200 years (\(T=200\)) of the pollution stock, which is roughly the amount of recorded CO\(_2\) emissions data. Next, using Eqns. (38) and (41), I compute \(\ddot{w}\), \(\breve{w}\), \(\ddot{r}\), and \(\breve{r}\).
I perform 1000 simulations of this procedure and obtain the frequency, over all the 1000 simulations, for which \(\ddot{r}\) and \(\breve{r}\) are less than zero:
The error detection probability is then defined as follows:
In this paper, I use the error detection probability as the measure of model uncertainty and set \(\pi = prob(\theta _1, \theta _2, p, q) \). The environmental authority will pick the correct model with probability of one when \(\pi =0\) and it is equally likely to pick either model when \(\pi =0.5\). Therefore, when \(\pi \rightarrow 0.5 \) overall time-varying model uncertainty is small and consequently it is difficult for the environmental to distinguish between the two models. When \(\pi \rightarrow 0\) the overall time-varying model uncertainty is large and it is easy for the environmental authority to distinguish between the two model. Following Hansen and Sargent (2008), I choose values of \(\theta _{{t+1, 1}}\) and \(\theta _{{t+1, 2}}\) associated with \(\pi \) of 0.1 and 0.2 because they correspond to commonly used confidence intervals of 95 and 90 %, respectively.
A drawback of the error detection probability algorithm in this context is that it does not generate a unique set of values of \(\theta _{{t+1, 1}}\) and \(\theta _{{t+1, 2}}\) for each \(\pi \). Therefore, in each of the simulations, I include additional restrictions on the possible parameters of \(\theta _i\). In particular, I select a combination of \(\theta _{1}\) and \(\theta _2\) for each pair (p, q) that satisfies Eq. (11) and produces the desired value of \(\pi \) (0.1 or 0.2) for which: (i) \(\theta _{1}\) is large enough that the results in regime 1 are close to those of the original non-robust model, (ii) increases of \(\theta _2\) produce almost no changes in the results of regime 2 and (iii) \(\theta _1>> \theta _2\).
One last clarification is pertinent. I do not claim that the error detection probability is the only measure of overall model uncertainty. Rather, I use the error detection probability associated with the time-varying model along with a set of restrictions outlined above to find values of \((\theta _1, \theta _2)\) that generate reasonable levels of robustness.
Appendix 2: Worst-Case Shock Numerical Results
In this Appendix, I present the solution for the worst-case shock. To keep the exposition succinct I only show the contour graphs.

Regime 1 and 2 worst-case emissions shocks for \(\pi \) = 10, 20 %
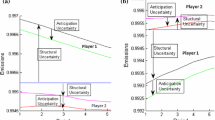
The two graphs in the first row of Fig. 4 show the worst-case shock (\(\omega \)) for all the different combinations of the transition probabilities for regime 1 and regime 2 when \(\pi =10\,\%\). The second row show the results when \(\pi =20\,\%\).
Appendix 3: Emission Taxes for Uncompensated Changes in p and q
In this Appendix, I show the effect of uncompensated changes in the transition probabilities. That is, changes in p and q without the corresponding change in \(\theta _2\) to keep the time-varying model uncertainty the same. Figure 5 shows the contour graph of emission taxes in each regime. The degree of overall model uncertainty varies across the graph but it is \(10\,\%\) at \(p=q=0.1\). Uncompensated increases in p produce a higher overall model uncertainty and generate lower emissions taxes in both regimes, although emission taxes are mostly insensitive to changes in p in regime 1. Uncompensated increases in q produce a lower overall model uncertainty and generate higher emissions taxes in both regimes, although emission taxes are mostly insensitive to changes in q in regime 2. These results along with those of Sects. 5.1 and 5.2 show that increases in the overall model uncertainty due to either higher p, lower q or higher \(\theta _i\) lead to higher emission taxes.

Emission taxes under uncompensated changes in p and q
Rights and permissions
About this article

Cite this article
Gonzalez, F. Pollution Control with Time-Varying Model Mistrust of the Stock Dynamics. Comput Econ 51, 541–569 (2018). https://doi.org/10.1007/s10614-016-9622-z
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10614-016-9622-z