
Abstract
Background
Animal movement data are regularly used to infer foraging behaviour and relationships to environmental characteristics, often to help identify critical habitat. To characterize foraging, movement models make a set of assumptions rooted in theory, for example, time spent foraging in an area increases with higher prey density.
Methods
We assessed the validity of these assumptions by associating horizontal movement and diving of satellite-telemetered ringed seals (Pusa hispida)—an opportunistic predator—in Hudson Bay, Canada, to modelled prey data and environmental proxies.
Results
Modelled prey biomass data performed better than their environmental proxies (e.g., sea surface temperature) for explaining seal movement; however movement was not related to foraging effort. Counter to theory, seals appeared to forage more in areas with relatively lower prey diversity and biomass, potentially due to reduced foraging efficiency in those areas.
Conclusions
Our study highlights the need to validate movement analyses with prey data to effectively estimate the relationship between prey availability and foraging behaviour.
Similar content being viewed by others
Background
Due to recent advances in biologging technologies and statistical analyses, animal movement data are increasingly used to provide ecological insights and inform conservation and management strategies [1,2,3]. As resource availability is a fundamental driver of animal behaviour [4], movement modelling can be used to understand relationships between animal behaviour and the heterogeneous landscapes they exploit. For example, putative foraging behaviours identified from tracking data have been used to define the critical foraging habitat of marine mammals [5].
Theories predicting how predators are expected to maximize foraging success and minimize energetic costs are often the basis for movement model assumptions [5]. A particularly important and common assumption in movement modelling is that animals are expected to use area-restricted search (ARS; less-direct movement, higher turning rates, overall lower speeds of travel) in areas of profitable foraging [6, 7], and thus studies link time spent in ARS with prey abundance and foraging activity (e.g., [8,9,10], Fig. 1). For example, in 2021, over half of the papers that used animal movement modelling to infer foraging behaviour assumed that time spent in ARS increased with prey abundance, 78% assumed that foraging effort increased with prey abundance, 85% assumed that time spent in ARS was an indication of foraging effort, and for studies on diving species, 81% assumed that more frequent diving was associated with higher foraging effort (Fig. 2, Additional file 1: Literature Review S1). Additionally, 39% of these papers assumed that areas with more ARS behaviour and/or foraging effort were important areas to focus conservation efforts (Fig. 2, Additional file 1: Literature Review S1). Some studies have found these assumed relationships realised. For example, reef manta rays (Manta alfredi) used ARS in plankton patches [11], and the number of northern elephant seal (Mirounga angustirostris) dives was related to the number of prey consumed [12]. While ARS behaviour can be indicative of foraging effort (e.g., searching, capturing, and handling prey [6, 7]), movement analyses rarely provide the true profitability (i.e., capture success) of ARS behaviour. This discrepancy may lead researchers to conclude, perhaps mistakenly, that more time spent in ARS in certain areas indicates “better” foraging conditions.

Conceptual plots of three assumed correlations between time spent in an area-restricted search behaviour, foraging effort (e.g., visits to prey patch), and prey abundance. Blue lines represent the animal’s trajectory in either A latitude–longitude movement, B number of vertical dives, or C both

Summary from the systematic review of 43 articles published in 2021 and if they made the following assumptions: Assumption 1: proportion of time spent in ARS increased with prey abundance; Assumption 2: foraging effort increased with prey abundance; Assumption 3: proportion of time spent in ARS was an indication of foraging effort; Assumption 4: for diving species, more frequent diving was associated with higher foraging effort; and Assumption 5: areas with more foraging (ARS and/or effort such as dives) were important areas for conservation. White text represents the percentage of papers that made the assumption (NAs removed). See Additional file 1 for detailed methodology and results
While proposed foraging mechanisms, such as ARS, are useful grounds to develop models [7], the complex behaviours of some species can result in unexpected patterns. For example, for generalists, higher prey diversity—independent of prey abundance—may affect foraging effort by increasing the chances of successful prey capture [13], and thus we may expect higher prey diversity to be associated with more time spent foraging. However, contrary to predictions, more time spent foraging in certain areas may indicate poorer foraging conditions (reduced prey density) such as in the case of sink habitats [14]. In addition, animal movement (horizontal and vertical) is influenced by more than just the resource landscape, but also energy, fear, and competition landscapes [15]. Behavioural inference solely based on location data may misrepresent underlying foraging success (e.g. [16]). These nuances can alter the interpretation of animal movement modelling results.
A variety of statistical tools have been developed to infer foraging behaviour from animal tracking data. Quantitative approaches such as state-space models use animal movement (i.e., horizontal location) data to infer behavioural states such as ARS or travel [17,18,19]. These methods are now able to estimate behaviour as a continuous value of move persistence, on a continuum from 0 to 1, where values towards 0 are indicative of ARS, and values towards 1 are indicative of travel [20, 21]. Additionally, newly developed mixed-effects models use environmental covariates to predict behaviour and identify relationships between behaviour and environment [21]. For marine mammals, behavioural estimates may also be inferred by diving data [22] and subsequently, analysis of behavioural data can inform foraging areas (e.g. [23, 24]). The development of associated R packages (e.g., the state-space modelling package: foieGras; [25]) have increased the uptake of such analyses.
Results from animal movement models are not typically validated with additional data (but see for example: [26]), which may lead to inaccurate or incomplete interpretation [27, 28]. Additionally, analyses often relate the movement of animals to environmental conditions that are proxies for the presence of prey (e.g. [29]), with no a priori hypotheses in terms of the direction of the relationship between foraging behaviour and environmental conditions. Using prey resource data when modelling animal movement allows further investigation of how animals interact with their environment and how we interpret their movement ecology (e.g. [30]). Here, we use movement and diving data from ringed seals (Pusa hispida), and modelled prey data, to assess whether: (1) movement models that incorporate information on prey density outperform models using only environmental proxies, and (2) locations with movement and diving behaviours usually classified as foraging are associated with a higher density or diversity of prey.
We analysed the movement and diving ecology of 53 ringed seals with over 14,000 estimated locations (see Methods) in Hudson Bay using the recently developed R package mpmm (move-persistence mixed-effects model package; [21]) that incorporated modelled prey biomass estimates [31]. Ringed seals are the most abundant and well-distributed pinniped in the Arctic, where they play an important role in the marine food web as the main conduit of energy between lower trophic levels and top predators (polar bears Ursus maritimus). When foraging, seals frequently return to a consistent depth on successive dives [32]. Ringed seals are generalists that forage on locally available prey, including Arctic cod (Boreogadus saida), northern sand lance (Ammodytes dubius), capelin (Mallotus villosus), and various invertebrates [33,34,35]. Sand lance (a demersal species) is a particularly important prey species for Hudson Bay ringed seals [35]. In years when the proportion of sand lance in their diet is relatively low, their dietary diversity is greater, and their body condition is lower [35]. Estimated ringed seal foraging behaviour has been linked to proxies of resource availability (e.g., chlorophyll-a [29]), but not in the context of fish biomass estimates through space and time. We used a move-persistence mixed modelling approach to characterize ringed seal behaviour relative to various spatial covariates [21]. Using these modelling results, we (1) ranked models with various estimated prey biomass and diversity variables, and compared their fit to those based solely on environmental variables (e.g., bathymetry), and explored relationships between (2) estimated move-persistence behaviour and foraging effort (i.e., diving), and (3) foraging effort and the estimated prey biomass, diversity, and environmental variables. Our goal was to investigate the nuances of interpretation of emerging and advanced statistical methods for animal movement and provide insights on foraging ecology of ringed seals.
Methods
Movement and Dive Data Ringed seals (n = 53 individuals) were captured in June-November from 2006 to 2012 on the Belcher Islands, Nunavut (Fig. 3). Seals were captured with monofilament mesh nets that were set perpendicular from shore in shallow (< 8 m depth) water (full details in [36]). All seals were equipped with ARGOS satellite telemetry transmitters. Specifically, seals captured in the earlier years, 2006–2009 (n = 11), were equipped with SPLASH data loggers (location and time-depth recorders [TDR]) manufactured by Wildlife Computers Ltd (Redmond, Washington, USA). Seals captured in the later years, 2010–2012 (n = 42), were equipped with 9000 × data loggers (location and TDR) from the Sea Mammal Research Unit (SMRU, University of St. Andrews, UK).

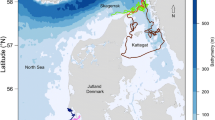
Map of A study area including bathymetry; B Simpson’s Diversity Index of 8 fish species; C total prey biomass of eight fish species; and biomass of D Arctic cod; E capelin; and F northern sand lance. Note difference in scale bars for prey biomass. Prey data summarized from [31]. Data presented in B-F are from 2009, the median year of the study
We used ringed seal data from the open-water season (i.e., the ice-free summer/autumn) when seals forage intensively to rebuild their depleted energy stores [33], and predation pressure from polar bears is theoretically low. We defined seasons independently for each year [as in 37]. Briefly, we used weekly ice graphs from the Canadian Ice Service (CIS) for the Hudson Bay region. We defined the beginning of the open-water season as the day that sea ice concentration decreased and remained below 50% (i.e., “break-up”) and the end of the open-water season as the day that sea ice concentration increased and remained above 50% (i.e., “freeze-up). We interpolated freeze-up and break-up dates based on the slope of the incline or decline (respectively) between the two weeks where the sea ice threshold was reached.
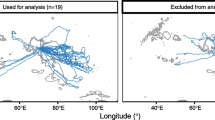
Data preparation ARGOS location data are observed irregularly in time and are prone to error [37], and we used a state-space model to account for these observation errors and predict more accurate tracks [38]. To avoid making predictions where there are no observed locations, we split tracks into multiple smaller segments when transmission halted for > 12 h (e.g., due to satellite availability and/or animal surfacing behaviour) and assigned a unique identification number to each segment. We removed tracks with less than 50 transmissions as these led to convergence issues during analysis. This filtering resulted in 124 tracks total for the 53 seals (i.e., most seals had multiple tracks, Additional file 1: Table S1). The locations were recorded at a frequency of every 1.2 ± 1.7 (mean ± SD) hours for (split) track durations of 19.0 ± 19.3 days. Overall, there were 41,082 locations. To account for observation error, we filtered and regularized the location data at a 4-h time step using a correlated random walk state-space model fitted in the foieGras R package [25, 39]. We limited movement rate in the state-space model based on the maximum velocity of ringed seals, 30 km/hr, to conservatively identify outliers [40]. Overall, these procedures resulted in 14,639 estimated locations (herein “locations”) to be used in analysis (Additional file 1: Table S1).
Our tags also recorded time-depth dive data. We matched dive data to filtered movement data within two hours of the location data (since movement data was filtered at a four-hour time step) which resulted in 115,990 dives associated with the movement locations. For our main analysis-validation exercises (see below) we calculated the total number of dives and the mean maximum dive depth (i.e., deepest depth during dive), separately. Additionally, to explore the validity of supplemental diving metrics (see results in Additional file 1), we calculated the sum of time spent diving, mean dive depth, cumulative dive depth, mean bottom time, sum of bottom time, and the mean proportion of maximum dive depth of all dives within the two-hour period.
Oceanographic data We extracted the bathymetry (m, 0.01 ̊ resolution) and monthly sea surface temperature (SST, °C, 0.01 ̊ resolution) associated with each state-space filtered seal location from the National Oceanic and Atmospheric Administration (NOAA) Environmental Research Division Data Access Program (ERDDAP) data servers from the etopo180 [41] and jplMURSST41mday [42] datasets, respectively, using the rerddapXtracto package [43]. Lower bathymetry values represent deeper depths than higher values.
Prey data We used estimated prey biomass data ([31], Fig. 3) from a dynamic bioclimate envelope model, which modelled spatiotemporal changes in the growth, population dynamics, habitat suitability, and movement of each prey fish species from year 1950 to 2100 based on changes in ocean conditions (e.g., sea temperature, pH, salinity) [44, 45]. The biomass of each species was modelled at a yearly time step on a 0.5 ̊ longitude by 0.5 ̊ latitude grid. The fish data were modelled for both a low-emission (representative concentration pathway, RCP 2.6) and a high-emission (RCP 8.5) climate change scenario [31]; these projections did not diverge during our study period (2006–2013), thus we used the RCP 8.5 data as it aligns more closely to emissions during that time. We matched each seal location in time with the corresponding biomass for each species. We included Arctic cod, capelin, and northern sand lance separately, due to their importance in ringed seal diet [35, 46]. We also included the sum of all species (hereby “total prey biomass”), which included Arctic cod, capelin, northern sand lance, as well as Pacific sand lance (Ammodytes hexaoterus), Arctic staghorn sculpin (Gymnocanthus tricuspis), shorthorn sculpin (Myoxocephalus Scorpius), moustache sculpin (Triglops murrayi), and rainbow smelt (Osmerus mordax). Finally, we calculated Simpson’s diversity index (D) among the eight prey species, which reflects the inverse of the probability that two randomly selected prey items are from the same species; lower D values are associated with lower species diversity [47]. We calculated D as
where \({n}_{i,j}\)= biomass of each species i in cell j, and \({N}_{j}\)= total biomass of all species in each cell j, using the R package vegan [48].
Statistical analyses
Move-persistence mixed-effects models Move persistence (\({\gamma }_{t}\); continuous value between 0 and 1) can be used to infer changes in behaviour along animals’ movement paths, where lower values indicate low levels of directional persistence and likely reflects ARS, which is often interpreted as foraging, and higher values indicate high levels of directional persistence, often interpreted as travel [21]. We used a mixed-effects modelling approach to estimate how move persistence varied in relation to bathymetry, SST, and prey biomass and diversity, while incorporating individual variability. We fitted move-persistence mixed-effects models using the mpmm package [21], which models \({\gamma }_{t}\) as a linear function of environmental/habitat predictors,
where \({\beta }_{0}\) is the fixed intercept, \({\beta }_{1}, \dots {\beta }_{n}\) are the fixed regression coefficients, \({m}_{t,1,k}, \dots {m}_{t,n,k}\) are the predictor variables, k indexes individuals, \({b}_{0,k}\) is the random deviation for the intercept of individual k, and \({\varepsilon }_{t}\) is the errors where \({\varepsilon }_{t}\sim N\left(0,{\sigma }_{\gamma }\right)\).
Model structure and model selection We fitted the move-persistence mixed-effects models to the state-space filtered and time-regularised seal tracks to infer relationships between behaviour and foraging habitat metrics. Our environmental-only models (proxies for resource availability) included all possible combinations of bathymetry and SST as covariates. Our prey-informed models included models with one of the prey covariates (e.g., capelin biomass), as well as models with bathymetry and each prey covariate together (e.g., bathymetry and capelin) as bathymetry may be more than a proxy for resources and may directly affect the behaviour of seals. All models included random intercepts for individuals, but not random slopes due to convergence issues. All covariates were scaled by year prior to modelling. We fitted the models using maximum likelihood and optimized the models using a bounds-constrained quasi-Newton method (nlminb) and Broyden-Fletcher-Goldfarb-Shanno (BFGS) algorithm. We used Akaike’s information criterion (AIC) to rank models, such that the model with the lowest AIC was characterized as best. If models were within two ΔAIC of the lowest AIC model, we considered the model with the fewest number of estimated parameters as the best model. We used the residuals function in the mpmm package to calculate one-step-ahead residuals from the best model to inspect potential deviations from model assumptions (e.g., normality of the process stochasticity, [38, 49]).
Leave-one-out cross validation We assessed the performance of our best-selected model using a leave-one-out cross validation, where we excluded one individual seal to create a new dataset and re-ran the model, and examined the coefficient estimates relative to the full model (all seals), as in [50].
Model validation with dive data To assess whether ARS behaviour was associated with increased dive behaviour we used linear mixed-effects models (LMM) to test the relationship between move persistence and the dive metrics (number of dives, and maximum dive depth, separately) using the nlme R package [51]. Additionally, we fitted LMMs to test the relationship between dive metrics and the associated prey data. We fitted the models using maximum likelihood. Each model included track identification number as a random effect, and an AR1 autocorrelation term to account for autocorrelation found in tracking data. We fitted LMMs to test the relationship between dive metrics and associated bathymetry, an important environmental variable, to highlight any differences in consistency relative to the LMMs using prey data. Additionally, we explored additional dive metrics: sum of time spent diving, mean dive depth, cumulative dive depth, mean bottom time, sum of bottom time, and in our bathymetry model: the mean proportion of maximum dive depth of all dives within a two-hour period. Finally, we explored relationships between move persistence from the null model and dive behaviour (see Additional file 1).
Results
Move-persistence mixed-effects models Ringed seals primarily used the eastern side of Hudson Bay, particularly near the Belcher Islands (Figs. 3, 4), where they were tagged. Seals exhibited a full range of move-persistence values in southeast Hudson Bay (range: 0.01–0.98). Some seals travelled to Southampton Island, western Hudson Bay, and James Bay, and most movements to these locations were more persistent (indicative of traveling), while movement was less persistent (indicative of ARS) near Southampton Island and western Hudson Bay (Figs. 3, 4).

Map of seal locations coloured by estimated move persistence (γt) from our best model, which included prey diversity and bathymetry, where low move persistence is indicative of area-restricted search (foraging), and high move persistence is indicative of direct movement (travelling)
The best-supported model for predicting move persistence included the fixed effects prey diversity and bathymetry (Table 1). Prey diversity was positively associated with move persistence. Bathymetry was negatively related to move persistence, where deeper areas were associated with higher move persistence (Fig. 5, Additional file 1: Table S2). Our second-best model included northern sand lance biomass and bathymetry, where northern sand lance biomass was positively associated with move persistence, and again bathymetry was negatively related to move persistence (Table 1, Additional file 1: Table S2).

Results from the top two move-persistence mixed models for fixed (thick blue line) and random (individual seals; thin grey lines) effects. The best model, A, included scaled prey diversity and bathymetry as covariates, and the second-best model, B, included northern sand lance biomass and bathymetry as covariates. Low move persistence is indicative of area-restricted search (foraging), and high move persistence is indicative of direct movement (travelling)
Leave-one-out cross validation The leave-one-out cross validation for our best model indicated that the parameter estimates when one individual was removed were consistently within the confidence intervals of estimates from the model based on all individuals (≥ 92% within estimate; Additional file 1: Table S3). This level of consistency was similar to that of the best model based only on environmental covariates (Additional file 1: Table S3). Additionally, the one-step-ahead residuals suggests only minor deviations from model assumptions (Additional file 1: Figs. S1, S2).
Model validation with dive data We expected a negative relationship between move persistence (from the best model) and all dive metrics. However, we found no significant relationship between move persistence predicted from our best model and number of dives and a positive relationship with maximum dive depth (Additional file 1: Table S4, Fig. S3). We also found positive relationships between move persistence and sum of time spent diving, mean dive depth, sum of dive depths, mean bottom time, and sum of bottom time (Additional file 1: Table S4, Fig. S3). However, as indicated by the nearly-zero slopes, these relationships are likely a factor of large sample size (Additional file 1: Table S4). When using the null model (no covariates) to predict move persistence values, we found similar relationships between move persistence and all dive metrics (Additional file 1: Table S4), indicating that these discrepancies are not driven by the specific covariates included in the move persistence model.
We did not find the expected positive relationship between the biomass of bottom dwelling northern sand lance (prey covariate of the second-best model, Table 1) and maximum depth of seal dives (Additional file 1: Table S4, Fig. S4). Similarly, we did not find the expected positive relationships between the number of dives (common proxy for foraging effort) and prey (northern sand lance) biomass or prey diversity (Additional file 1: Table S4, Figs. S4, S5). However, we found two expected relationships: (1) seals dove deeper in deeper waters than shallow waters (i.e., negative relationship between maximum dive depth and bathymetry); and (2) seals used a greater proportion of the water column in shallow waters (i.e., positive relationship between the proportion of the water column used and bathymetry, Additional file 1: Table S4, Fig. S6).
Discussion
Our paper highlights that common assumptions on how predators alter their movement and behaviour relative to prey distribution may not be realistic, by using a case study of spatio-temporally-linked movement, diving, and modelled prey biomass data of ringed seals. While the generally assumed relationship between foraging behaviour and prey density has been observed in some species (e.g., manta rays [11]), our results suggest that foraging effort—measured as low move persistence—may occur more in areas characterized by lower estimated prey diversity and biomass. While our prey data were modelled and therefore subject to assumptions (see below), our movement models that predicted these unexpected relationships outperformed the null move-persistence model and models incorporating environmental variables alone. Additionally, we did not find the expected relationships between foraging-like movement and diving behaviours, nor those between dive behaviour and modelled prey biomass. These results suggest that one should be cautious when using movement and behavioural models to infer important areas for foraging.
Our study demonstrates how using modelled prey fields, rather than simpler prey proxies, can help avoid inaccurate interpretation of ARS behaviour and aligns with other studies that have shown deviations from the common, and sometimes adequate, assumption that animals use ARS when foraging. ARS has been linked to prey capture for species foraging on patchily-distributed prey, for example, as confirmed from the clicking-behaviour of dolphins [10]. In contrast, low move persistence was related to less intense foraging activity of Adélie penguins (Pygoscelis adeliae), opposite to expectations and possibly indicative of resting behaviour [50]. Similarly, depth-accelerometers revealed falsely-identified ARS behaviour when masked boobies (Sula dactylatra) were resting on the water’s surface [16]. Additionally, some species may move quickly through foraging areas while still completing successful prey captures (e.g., southern elephant seals, Mirounga leonina, [52]).
Our results indicate that prey covariates are important for explaining move persistence, but that the relationship is not in the expected direction, and thus suggest that the common assumption that increased time spent in an area reflects increased foraging success may be incorrect. In fact, foraging may conclude earlier in high prey diversity and density areas due to animals swiftly completing sufficient prey capture events (e.g., reached stomach capacity). That is, predators may spend less time foraging in high prey density (or diversity) areas due to high foraging success and more time searching for and capturing prey (i.e., ARS behaviour) in areas with lower prey density and/or patchy environments [e.g., 53,54]. Specifically, it is possible that the seals in our study sometimes found sufficient prey mid-dive, especially given that the prey densities encountered appeared moderate to high, rather than low (zero) to high (Additional file 1: Fig. S7). Alternatively, while ringed seals are considered generalists at the population level, they may also be more specialized at the individual level [53, 54]. Increased prey diversity may lead to a reduction in preferred prey species/type for some individuals, and thus a reduction in foraging behaviour. Additionally, prey species such as sand lance may require more searching due to their small body size and burrowing behaviour, which may explain why more time spent foraging was related to low biomass.
While recent advances in state-space models have moved beyond the discrete behavioural prediction (i.e., 0 = foraging or 1 = travelling), interpretation of the results remains difficult. ARS behaviour is often assumed to be a single behavioural state—foraging—but may actually be a composite of other behaviours which may not be directly correlated to foraging effort or success [39]. For example, seals commonly rest or sleep at the surface (“bob”) in the water, which would likely result in low move persistence. Similarly, mating behaviours may also result in low move persistence and further confuse interpretation, as has been found for white-tailed deer (Odocoileus virginianus) [28]. Additional validation using multiple data sources (e.g., jaw accelerometers, [55]; video recorders [26],) may help to determine how accurately movement data can be used to classify foraging behaviour for further model refinement. Further, identifying relationships between prey distribution and predator behaviour may be further complicated by spatiotemporal scale, where at a certain (unknown) scale it is difficult to differentiate between foraging and travelling (for example, as studied in wandering albatross (Diomedea exulans): [56], elk (Cervus canadensis): [57], and reef manta rays: [11]). We regularised our movement data at a four-hour time step, which may represent a short duration relative to other studies (e.g. [21], used a 24-h time step) but a long duration for foraging and movement ecology. Choosing a relevant species-specific time step that reflects behavioural “states” should not be too fine-scale (i.e., detecting behavioural “events”) or too coarse (i.e., combining multiple behaviours [27]) and may require additional field observations and technologies (i.e., animal-borne video cameras) to understand the durations of certain behaviours for better interpretation.
We detected the logical relationship that deeper dives were associated with deeper depth, but we did not find meaningful and expected relationships between most dive characteristics and apparent foraging effort. While seals may “give up” on a dive and return to the surface if prey density is insufficient [58], they are expected to spend time searching for and pursuing prey if prey fields are moderate. However, we did not find a relationship between move persistence and number of dives, and no dive characteristic was significantly predictive of move persistence. Consistent with [29], we found that ringed seals had low move persistence at shallower depths, as has been found with other species (e.g., reef sharks [59]).
Modelling is, by definition, a simplistic representation of a complex system. Analyzing animal distribution data using modelled prey data (rather than empirical) is a valuable exercise that is becoming more common with emerging technology and remote sensing data (e.g. [60]), but it is subject to the validity of underlying assumptions. Our modelling approach did not include invertebrates, which have been found in ringed seal diet analyses, particularly during the spring (found in 15% of ringed seal stomachs [35]). However, the anticipated relationship where more invertebrate prey would yield lower move-persistence behaviour in seals would require an inverse relationship in distribution between fish and invertebrate biomass. It is unlikely that their distribution is opposite to that of fish, as we expect areas of high production to be associated with high invertebrate and total estimated forage fish biomass (i.e., along the coastlines, Fig. 3). The prey distribution was modelled at a relatively coarse spatial resolution (0.5 ̊ latitude × 0.5 ̊ longitude grid, equivalent to ~ 65 × 65 km). This coarse resolution likely overlooks important heterogeneity in the prey distribution, and the variation among neighbouring grid cells may not be meaningful at this spatial scale. Thus, our move-persistence results and theoretical assumptions may be partly an artifact of the dynamic bioclimate envelope model. However, in support of these prey density models, the finer spatial scale of sea surface temperature (0.2 ̊ latitude × 0.2 ̊ longitude grid), a known predictor of seal movement behaviour [29], did not serve as a better predictor of movement than our modelled prey data (Table 1), which suggests that modelled prey relatively improved model fit. Additionally, move persistence estimated from our null model (i.e., with no predictor variables) was also not related to the diving metrics, further illustrating the mismatch between our assumptions and results regardless of prey data (Additional file 1: Table S4). During our leave-one-out exercise, we found that the prey variables performed approximately as well as environmental variables, which may be expected as prey was modelled using environmental variables [31]. Further, we used AIC to rank our move-persistence models. AIC is a measure of relative model quality, not a measure of absolute model fit [61].
ARGOS data is prone to error that may contribute to confusing results. We used a state-space model to account for error in the ARGOS data [38], which improved the overall quality of the locations [62]. Newer tags, such as Fastloc-GPS, provide locations with better accuracy and at an increased frequency [63]. As a result, data from Fastloc-GPS tags can provide insight at a finer spatio-temporal scale (e.g., identifying turtle conservation areas [64] and migration details [65]). While the general foraging patterns found using ARGOS tags is consistent with those found using Fastloc-GPS [66], future studies using Fastloc-GPS can provide useful insight by identify foraging at a smaller scale [67]. However, it is important to match the scale of the prey data to the scale of the predator data [54], thus, our prey data might need to be at a finer scale if finer-scale predator movement data is used in the future.
Fear of predators, and inter- and intra-specific competition affects the behaviour, foraging patterns, and distribution of prey species [68, 69]. Prey may avoid regions where perceived predation risk is high and forgo feeding opportunities in order to reduce predation risk, as has been found with kangaroo rats (Dipodomys merriami [70]). Seal prey biomass may be relatively high near the shoreline, but this habitat may be associated with increased polar bear abundance and therefore “riskier” habitat. We focused our study on ringed seals during the summer/autumn period when predation pressures from polar bears are removed, but seals may still exhibit antipredator behaviours (e.g., vigilance in lieu of foraging), which may contribute to additional noise in the movement and diving data [71]. Additionally, harbour seals (Phoca vitulina) and harp seals (Pagophilus groenlandicus) occur in Hudson Bay and share a similar diet with ringed seals [72,73,74] and thus may contribute to interspecific competition. Intraspecific habitat segregation amongst age classes is known to occur in many pinnipeds (e.g. [75]). Adult ringed seals forage under land-fast ice and subadults forage further offshore during the ice-covered winter and spring [33], which may be related to intraspecific competition.
Conclusions
Our study demonstrated that although new tools to estimate drivers of animal movement may suggest important relationships between habitat and behaviour in some species, these relationships need to be considered carefully for opportunistic species, or species that have a clear disconnect between horizontal movement and diving activity. There are many nuances to interpreting results from animal movement and associated behavioural estimates, but these models are appropriate for testing ecological hypotheses on the areas and covariates associated with where animals spend relatively more time exhibiting various behaviours. While we have explored reasons why more foraging-like behaviour may not indicate better foraging habitat (e.g., low modelled prey density and/or foraging success), areas where animals are spending relatively more time are still important areas for habitat protection and conservation [2]. Additionally, incorporation of multiple data types as a validation exercise can provide essential insight on presumed behaviours. Our work highlights that identifying foraging behaviour from movement and dive data may be precarious without prior knowledge on prey availability, and that caution in providing interpretations is warranted when this information is not available. Newer technology, such as Fastloc-GPS, may provide important behavioural insight at a finer spatio-temporal scale that clarifies these inconsistencies. These nuances should be considered as statistical methods for animal movement data continue to become more advanced and accessible, and as identifying habitat to protect depends on effective analysis of movement data.
Availability of data and materials
The fish dataset is available in the Dryad repository, https://doi.org/10.5061/dryad.x69p8czjs. The seal dataset supporting the conclusions of this article is available from the corresponding author (KRNF) upon reasonable request.
Abbreviations
- ARS:
-
Area-restricted search
- TDR:
-
Time-depth recorders
- SST:
-
Sea surface temperature
- SMRU:
-
Sea Mammal Research Unit
- CIS:
-
Canadian Ice Service
- NOAA:
-
National Oceanic and Atmospheric Administration
- ERDDAP:
-
Environmental Research Division Data Access Program
- RCP:
-
Representative concentration pathway
- D :
-
Simpson’s Diversity Index
- nlminb:
-
Bounds-constrained quasi-Newton method
- BFGS:
-
Broyden-Fletcher-Goldfarb-Shanno
- AIC:
-
Akaike’s information criterion
- LMM:
-
Linear mixed-effects models
References
Hussey NE, Kessel ST, Aarestrup K, Cooke SJ, Cowley PD, Fisk AT, Harcourt RG, Holland KN, Iverson SJ, Kocik JF, Mills JE, Flemming FG, et al. Aquatic animal telemetry: a panoramic window into the underwater world. Science. 2015. https://doi.org/10.1126/science.1255642.
Hays GC, Bailey H, Bograd SJ, Bowen WD, Campagna C, Carmichael RH, et al. Translating marine animal tracking data into conservation policy and management. Trends Ecol Evol Elsevier. 2019;34:459–73.
Joo R, Boone ME, Clay TA, Patrick SC, Clusella-Trullas S, Basille M. Navigating through the R packages for movement. J Anim Ecol Wiley Online Library. 2020;89:248–67.
Pyke GH, Pulliam HR, Charnov EL. Optimal foraging: a selective review of theory and tests. Q Rev Biol. 1977;52:137–54.
Block BA, Jonsen ID, Jorgensen SJ, Winship AJ, Shaffer SA, Bograd SJ, et al. Tracking apex marine predator movements in a dynamic ocean. Nature. 2011;475:86–90. https://doi.org/10.1038/nature10082.
Kareiva P, Odell G. Swarms of predators exhibit “preytaxis” if individual predators use area-restricted search. Am Nat. 1987;130:233–70.
Benhamou S. Efficiency of area-concentrated searching behaviour in a continuous patchy environment. J Theor Biol Elsevier. 1992;159:67–81.
Mori Y, Watanabe Y, Mitani Y, Sato K, Cameron MF, Naito Y. A comparison of prey richness estimates for Weddell seals using diving profiles and image data. Mar Ecol Prog Ser. 2005;295:257–63.
Mcmahon CR, Hindell MA, Charrassin J-B, Corney S, Guinet C, Harcourt R, et al. Finding mesopelagic prey in a changing Southern Ocean. Sci Rep. 2019;9:1–11.
Bailey H, Lyubchich V, Wingfield J, Fandel A, Garrod A, Rice AN. Empirical evidence that large marine predator foraging behavior is consistent with area‐restricted search theory. Ecology. 2019. https://doi.org/10.1002/ecy.2743.
Papastamatiou YP, DeSalles PA, McCauley DJ. Area-restricted searching by manta rays and their response to spatial scale in lagoon habitats. Mar Ecol Prog Ser. 2012;456:233–44.
Adachi T, Takahashi A, Costa DP, Robinson PW, Hückstädt LA, Peterson SH, Holser RR, Beltran RS, Keates TR, Naito Y. Forced into an ecological corner: round-the-clock deep foraging on small prey by elephant seals. Sci Adv. 2021. https://doi.org/10.1126/sciadv.abg3628.
Sinclair ARE, Mduma S, Brashares JS. Patterns of predation in a diverse predator–prey system. Nature. 2003;425:288–90.
Delibes M, Gaona P, Ferreras P. Effects of an attractive sink leading into maladaptive habitat selection. Am Nat. 2001;158:277–85.
Williams HJ, Safi K. Certainty and integration of options in animal movement. Trends Ecol Evol Elsevier. 2021;36:990–9.
Sommerfeld J, Kato A, Ropert-Coudert Y, Garthe S, Hindell MA. Foraging parameters influencing the detection and interpretation of area-restricted search behaviour in marine predators: a case study with the masked booby. PLoS ONE. 2013;8(5):e63742. https://doi.org/10.1371/journal.pone.0063742.
Franke A, Caelli T, Hudson RJ, Garthe S, Hindell MA. Analysis of movements and behavior of caribou (Rangifer tarandus) using hidden Markov models. Ecol Modell. 2004;173:259–70.
Jonsen ID, Mills Flemming J, Myers RA. Robust state-space modeling of animal mvoement data. Ecology. 2005;86:2874–80.
Langrock R, King R, Matthiopoulos J, Thomas L, Fortin D, Morales JM. Flexible and practical modeling of animal telemetry data: hidden Markov models and extensions. Ecology. 2012;93:2336–42.
Auger-Méthé M, Albertsen CM, Jonsen ID, Derocher AE, Lidgard DC, Studholme KR, et al. Spatiotemporal modelling of marine movement data using Template Model Builder (TMB). Mar Ecol Prog Ser. 2017;565:237–49.
Jonsen ID, McMahon CR, Patterson TA, Auger-Méthé M, Harcourt R, Hindell MA, et al. Movement responses to environment: fast inference of variation among southern elephant seals with a mixed effects model. Ecology. 2019;100:1–8.
Bestley S, Jonsen ID, Hindell MA, Harcourt RG, Gales NJ. Taking animal tracking to new depths: Synthesizing horizontal - vertical movement relationships for four marine predators. Ecology. 2015;96:417–27.
Breed GA, Jonsen ID, Myers RA, Bowen WD, Leonard ML, Myers A. Sex-specific, seasonal foraging tactics of adult grey seals (Halichoerus grypus) revealed by state-space analysis. Ecology. 2009;90:3209–21.
Oksanen SM, Niemi M, Ahola MP, Kunnasranta M. Identifying foraging habitats of Baltic ringed seals using movement data. Mov Ecol BioMed Central. 2015;3:1–11.
Jonsen I, Patterson TA. foieGras: fit continuous-time state-space and latent variable models for filtering Argos satellite (and other) telemetry data and estimating movement behaviour. R package; 2020.
Davis RW, Fuiman LA, Williams TM, Collier SO, Hagey WP, Kanatous SB, Kohin S, Horning M. Hunting behavior of a marine mammal beneath the Antarctic fast ice. Science. 1999;283(5404):993–6. https://doi.org/10.1126/science.283.5404.993.
Hebblewhite M, Haydon DT. Distinguishing technology from biology: a critical review of the use of GPS telemetry data in ecology. Philos Trans R Soc B Biol Sc. 2010;365:2303–12.
Buderman FE, Gingery TM, Diefenbach DR, Gigliotti LC, Begley-Miller D, McDill MM, et al. Caution is warranted when using animal space-use and movement to infer behavioral states. Mov Ecol BioMed Central. 2021;9:1–12.
Yurkowski DJ, Semeniuk CAD, Harwood LA, Rosing-Asvid A, Dietz R, Brown TM, Clackett S, Grgicak-Mannion A, Fisk AT, Ferguson SH. Influence of sea ice phenology on the movement ecology of ringed seals across their latitudinal range. Mar Ecol Progr Ser. 2016;562:237–50. https://doi.org/10.3354/meps11950.
Vogel EF, Biuw M, Blanchet M-A, Jonsen ID, Mul E, Johnsen E, et al. Killer whale movements on the Norwegian shelf are associated with herring density. Mar Ecol Prog Ser. 2021;665:217–31.
Florko KRN, Tai TC, Cheung WWL, Ferguson SH, Sumaila UR, Yurkowski DJ, et al. Predicting how climate change threatens the prey base of Arctic marine predators. Ecol Lett. 2021;24:2563–75.
Kelly BP, Wartzok D. Ringed seal diving behavior in the breeding season. Can J Zool. 1996;74:1547–55.
McLaren IA. The biology of the ringed seal (Phoca hispida Schreher) in the eastern Canadian Arctic. Fish Res Board Canada. 1958;118:1–97.
Smith TG. The ringed seal, Phoca hispida, of the Canadian western Arctic. Bull Fish Res Board Canada. 1987;216:81.
Chambellant M, Stirling I, Ferguson SH. Temporal variation in western Hudson Bay ringed seal Phoca hispida diet in relation to environment. Mar Ecol Prog Ser. 2013;481:269–87.
Harwood L, Smith T, Auld J. Fall migration of ringed seals (Phoca hispida) through the Beaufort and Chukchi Seas, 2001–02. Arctic. 2012;65:35–44.
Costa DP, Robinson PW, Arnould JPY, Harrison A-L, Simmons SE, Hassrick JL, Hoskins AJ, Kirkman SP, Oosthuizen H, Villegas-Amtmann S, Crocker DE. Accuracy of ARGOS locations of pinnipeds at-sea estimated using Fastloc GPS. PLoS ONE. 2010;5(1):e8677. https://doi.org/10.1371/journal.pone.0008677.
Auger‐Méthé M, Newman K, Cole D, Empacher F, Gryba R, King AA, et al. A guide to state–space modeling of ecological time series. Ecol Monogr. 2021;91(4):e01470. https://doi.org/10.1002/ecm.1470.
Breed GA, Costa DP, Jonsen ID, Robinson PW, Mills-Flemming J. State-space methods for more completely capturing behavioral dynamics from animal tracks. Ecol Modell. 2012;235:49–58.
Freitas C, Lydersen C, Fedak MA, Kovacs KM. A simple new algorithm to filter marine mammal Argos locations. Mar Mammal Sci. 2008;24:315–25.
Amante C, Eakins BW (2009) ETOPO1 arc-minute global relief model: procedures, data sources and analysis
Chin TM, Vazquez-Cuervo J, Armstrong EM. A multi-scale high-resolution analysis of global sea surface temperature. Remote Sens Environ. 2017;200:154–69.
Mendelssohn R (2019) rerddapXtracto: extracts environmental data from ‘ERDDAP’ web services. R package
Cheung WWL, Jones MC, Reygondeau G, Stock CA, Lam VWY, Frölicher TL. Structural uncertainty in projecting global fisheries catches under climate change. Ecol Modell Elsevier. 2016;325:57–66.
Cheung WWL, Frölicher TL, Lam VWY, Oyinlola MA, Gabriel Reygondeau U, Sumaila R, Tai TC, Teh LCL, Wabnitz CCC. Marine high temperature extremes amplify the impacts of climate change on fish and fisheries. Sci Adv. 2021. https://doi.org/10.1126/sciadv.abh0895s.
Young BG, Ferguson SH. Using stable isotopes to understand changes in ringed seal foraging ecology as a response to a warming environment. Mar Mammal Sci. 2014;30:706–25.
Simpson EH. Measurement of diversity. Nature. 1949;163:688–688.
Oksanen J, Blanchet FG, Friendly M, Kindt R, Lengendre P, McGlinn D, et al. (2019) Vegan: community ecology package
Thygesen UH, Albertsen CM, Berg CW, Kristensen K, Nielsen A. Validation of ecological state space models using the Laplace approximation. Environ Ecol Stat Springer. 2017;24:317–39.
Riaz J, Bestley S, Wotherspoon S, Emmerson L. Horizontal-vertical movement relationships: Adélie penguins forage continuously throughout provisioning trips. Mov Ecol BioMed Central. 2021;9:1–15.
Pinheiro J (2009) nlme: linear and nonlinear mixed effects models. R package version 3.1-96. http://cran.r-project.org/
Thums M, Bradshaw CJA, Hindell MA. In situ measures of foraging success and prey encounter reveal marine habitat-dependent search strategies. Ecology. 2011;92:1258–70.
Yurkowski DJ, Ferguson S, Choy ES, Loseto LL, Brown TM, Muir DCG, Semeniuk CAD, Fisk AT. Latitudinal variation in ecological opportunity and intraspecific competition indicates differences in niche variability and diet specialization of Arctic marine predators. Ecol Evol. 2016;6(6):1666–78. https://doi.org/10.1002/ece3.1980.
Allegue H, Réale D, Picard B, Guinet C. Track and dive-based movement metrics do not predict the number of prey encountered by a marine predator. Mov Ecol. 2023. https://doi.org/10.1186/s40462-022-00361-2.
Beltran RS, Kendall-Bar JM, Pirotta E, Adachi T, Naito Y, Takahashi A, Cremers J, Robinson PW, Crocker DE, Costa DP. Lightscapes of fear: How mesopredators balance starvation and predation in the open ocean. Sci Adv. 2021. https://doi.org/10.1126/sciadv.abd9818.
Weimerskirch H, Pinaud D, Pawlowski F, Bost C-A. Does prey capture induce area-restricted search? A fine-scale study using GPS in a marine predator, the wandering albatross. Am Nat. 2007;170:734–43.
Fryxell JM, Hazell M, Börger L, Dalziel BD, Haydon DT, Morales JM, McIntosh T, Rosatte RC. Multiple movement modes by large herbivores at multiple spatiotemporal scales. Proc Nat Acad Sci. 2008;105(49):19114–9. https://doi.org/10.1073/pnas.0801737105.
Thompson D, Fedak MA. How long should a dive last? A simple model of foraging decisions by breath-hold divers in a patchy environment. Anim Behav. 2001;61:287–96.
Papastamatiou YP, Watanabe YY, Demšar U, Leos-Barajas V, Bradley D, Langrock R, et al. Activity seascapes highlight central place foraging strategies in marine predators that never stop swimming. Mov Ecol. 2018;6:1–15.
Clairbaux M, Cheung WWL, Mathewson P, Porter W, Courbin N, Fort J, et al. Meeting Paris agreement objectives will temper seabird winter distribution shifts in the North Atlantic Ocean. Glob Chang Biol. 2021;27:1457–69.
Burnham KP, Anderson DR. Multimodel inference: understanding AIC and BIC in model selection. Sociol Methods Res. 2004;33:261–304.
Jonsen ID, Patterson TA, Costa DP, Doherty PD, Godley BJ, Grecian WJ, et al. A continuous-time state-space model for rapid quality-control of Argos locations from animal-borne tags. Mov Ecol. 2020;8:8–31.
Dujon AM, Lindstrom RT, Hays GC. The accuracy of Fastloc-GPS locations and implications for animal tracking. Methods Ecol Evol. 2014;5:1162–9.
Hays GC, Mortimer JA, Rattray A, Shimada T, Esteban N. High accuracy tracking reveals how small conservation areas can protect marine megafauna. Ecol Appl. 2021;31:1–9.
Dujon AM, Schofield G, Lester RE, Esteban N, Hays GC. Fastloc-GPS reveals daytime departure and arrival during long-distance migration and the use of different resting strategies in sea turtles. Mar Biol. 2017;164:1–14.
Dragon A-C, Bar-Hen A, Monestiez P, Guinet C. Comparative analysis of methods for inferring successful foraging areas from Argos and GPS tracking data. Mar Ecol Prog Ser. 2012;452:253–67.
Patterson TA, McConnell BJ, Fedak MA, Bravington MV, Hindell MA. Using GPS data to evaluate the accuracy of state–space methods for correction of Argos satellite telemetry error. Ecology. 2010;91:273–85.
Lima SL, Dill LM. Behavioral decisions made under the risk of predation: a review and prospectus. Can J Zool. 1990;68(619–40):2.
Kuefler D, Avgar T, Fryxell JM. Rotifer population spread in relation to food, density and predation risk in an experimental system. J Anim Ecol. 2012;81:323–9.
Laundré JW, Hernandez L, Lopez Medina P, Campanella A, Lopez-Portillo J, Gonzalez-Romero A, et al. The landscape of fear: the missing link to understand top-down and bottom-up controls of prey abundance? Ecology. 2014;95:1141–52.
Burkholder DA, Mardon JSF, Dunphy-Daly MM, Wirsing AJ, Heithaus MR. Predation risk influences the diving behavior of a marine mesopredator. Open Ecol J. 2010;3:8–15.
Florko KRN, Bernhardt W, et al. Decreasing sea ice conditions in western Hudson Bay and an increase in abundance of harbour seals (Phoca vitulina) in the Churchill River. Polar Biol. 2018;41(6):1187–95. https://doi.org/10.1007/s00300-018-2277-6.
Young BG, Loseto LL, Ferguson SH. Diet differences among age classes of Arctic seals: Evidence from stable isotope and mercury biomarkers. Polar Biol. 2010;33:153–62.
Ogloff WR, Yurkowski DJ, Davoren GK, Ferguson SH. Diet and isotopic niche overlap elucidate competition potential between seasonally sympatric phocids in the Canadian Arctic. Mar Biol. 2019;166:103.
Jeglinski JWE, Goetz KT, Werner C, Costa DP, Trillmich F. Same size–same niche? Foraging niche separation between sympatric juvenile Galapagos sea lions and adult Galapagos fur seals. J Anim Ecol Wiley Online Library. 2013;82:694–706.
Acknowledgements
We gratefully acknowledge the Inuit hunters and the Sanikiluaq Hunters and Trappers Association for assistance in the field, especially Lucassie and Johnassie Ippak and their families. We thank B. Hunt and C. Harley for helpful feedback on earlier drafts of this manuscript.
Funding
We gratefully acknowledge the financial support from Fisheries and Oceans Canada, Nunavut Wildlife Management Board, ArcticNet, Natural Sciences and Engineering Research Council of Canada (NSERC), Ocean Leaders Graduate Fellowship, Canada Research Chairs program, Canada Foundation for Innovation, B.C. Knowledge Development Fund, Weston Family Foundation, Northern Scientific Training Program, Polar Knowledge Canada, and the US Office of Naval Research (grant #: N00014-18-1-2405).
Author information
Authors and Affiliations
Contributions
KRNF and MAM designed the study, DJY and SHF collected the seal data, TCT and WWLC estimated the fish data, CRS, IDJ, and MAM provided statistical and coding insight, DR provided advice on interpretation, KRNF did the analysis, prepared figures and tables, and wrote the manuscript with contribution from MAM. All authors provided ideas and editorial feedback. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethics approval and consent to participate
All applicable institutional and/or national guidelines for the care and use of animals were followed. Animal handling was approved by the Freshwater Institute Animal Care Committee (FWI-ACC-2006 to 2012) and Fisheries and Oceans Canada’s Licenses to Fish for Scientific Purposes (S-05/06-09/13-1006-NU).
Consent for publication
Not applicable.
Competing interests
The authors declare that they have no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Additional file 1.
Supplementary Methods, Tables and Figures.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/. The Creative Commons Public Domain Dedication waiver (http://creativecommons.org/publicdomain/zero/1.0/) applies to the data made available in this article, unless otherwise stated in a credit line to the data.
About this article

Cite this article
Florko, K.R.N., Shuert, C.R., Cheung, W.W.L. et al. Linking movement and dive data to prey distribution models: new insights in foraging behaviour and potential pitfalls of movement analyses. Mov Ecol 11, 17 (2023). https://doi.org/10.1186/s40462-023-00377-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s40462-023-00377-2