
Abstract
This paper focuses on the finite-time stability of linear stochastic fractional-order systems with time delay for \(\alpha \in (\frac{1}{2},1)\). Under the generalized Gronwall inequality and stochastic analysis techniques, the finite-time stability of the solution for linear stochastic fractional-order systems with time delay is investigated. We give two illustrative examples to show the interest of the main results.
Similar content being viewed by others

1 Introduction
Fractional-order systems are dynamical systems that can be modeled by a fractional differential equation carried with a non-integer derivative. Recently, much research work was focused on such a concept, for example [1–3]. Indeed, the authors in [1] have presented the problem of the existence and uniqueness of solutions of boundary value problems (BVPs) for a nonlinear fractional differential equation of order \(2<\alpha <3\). In addition, the work in [2] has concentrated on solution of fractional differential equations via coupled fixed point. Furthermore, Badr Alqahtani et al. in [3] have suggested a solution for Volterra fractional integral equations by hybrid contractions.
Since the middle of the last century, the control theory has been subject to a revolution and a very huge amount of research work in the literature. A great majority of work, established until now, has focused on the classical integer-order systems, modeled with differential equations where an integer-order derivative is used. Meanwhile, with the development of science and applied mathematics, it has been discovered that several physical systems are really described with differential fractional-order equations, where a fractional derivative order is used. Consequently, such systems cannot be effectively modeled using the classical differential integer-order equations. As a result to this fact, a growing interest is being given by researchers in the last few decades, to investigate fractional-order systems and various problems inside the control theory, such as state estimation, control, finite-time stability and fault diagnosis, are being tackled. Note that, compared to the integer-order case, the fractional-order framework represents a fertile field of research, since it has been “recently” addressed by researchers and several specific questions are still to investigate for fractional-order systems.
In the literature, many researchers have been studied the stability of the solution for fractional-order system (see [10–12] and [17–19]). In some cases, however, it is advantageous that a dynamical system has the finite-time stability (FTS) property which plays an essential issue in the analysis of the transient behavior of systems. The FTS can be divided into two types. The stability of a system on a finite-time interval is studied; see [4, 5, 7, 9, 13] and [15] and [20–23]. The other work can be described as the trajectories of the system converges on a finite-time interval to the equilibrium point; see [16].
The main contribution of this research work is to deal with the FTS of a class of linear stochastic fractional-order systems with time delay for \(\alpha \in (\frac{1}{2},1)\) using the generalized Gronwall inequality and the classical techniques of the stochastic analysis.
The structure of the paper is organized as follows. In Sect. 2, we introduce some hypotheses and classical notions. In Sect. 3, by applying the generalized Gronwall inequality, the FTS of linear stochastic fractional-order systems with time delay is studied. In Sect. 4, we give two illustrative examples to show our theory.
2 Preliminaries and definitions
In this section, we introduce some basic notions and definitions which are useful for our results. For more details see [6] and [14].
Let \(\{X,\mathcal{F}, (\mathcal{F}_{t})_{t\geq 0},\mathbb{P}\}\) be a complete probability space with a filtration fulfilling the usual conditions. \(W(t)\) is a 1-dimensional Brownian motion defined on the probability space.
Let \(C([-\tau , 0];\mathbb{R}^{n})\) be the space of the continuous functions \(\overline{\varphi }:[-\tau , 0]\rightarrow \mathbb{R}^{n}\) with the norm \(\|\overline{\varphi }\|= \sup_{-\tau \leq s\leq 0}\| \overline{\varphi }(s)\|\) where \(\|\lambda \|=\sqrt{\lambda ^{T}\lambda }\) for any \(\lambda \in \mathbb{R}^{n}\). Consider the linear stochastic fractional-order time delay systems of the form
where the initial condition is \(\{x(t), -\nu \leq t\leq 0\}=\overline{\varphi }(t)\in \mathbb{R}^{n}\).
\({}^{C}D_{0,t}^{\alpha }\) denotes the operator of the Caputo fractional derivative (CFD) of order \(\frac{1}{2}<\alpha <1\); \(A;B;C\in \mathbb{R}^{n\times n}\).
Definition 2.1
Given \(0<\eta <1\). The CFD is defined as
Definition 2.2
The Mittag-Leffler function (MLF) in two parameters is defined by
where \(\beta >0\), \(\mu >0\) \(z\in \mathbb{C}\).
Remark 2.1
For \(\mu =1\), \(E_{\beta ,1}=E_{\beta }\) and \(E_{1,1}(z)=\exp (z)\).
Definition 2.3
System (2.1) is finite-time stochastically stable (FTSS) w.r.t. \(\{\delta , \varepsilon , T\}\), \(\delta < \varepsilon \), if
implying
3 Main results
Let \(T>\nu \) and \(m\in \mathbb{N}\) with \((m+1)\nu < T\leq (m+2)\nu \).
Theorem 3.1
System (2.1) is FTSS with respect to \((\delta ,\varepsilon ,T)\), if the following condition is fulfilled:
with
for \(k\in [0,m]\), \({l_{0}(\nu )=1}\), \({M_{1}= \frac{8\Gamma (2\alpha -1)}{4^{\alpha }\Gamma ^{2}(\alpha )}\|B\|^{2}}\), \({M_{2}=\frac{4}{\Gamma ^{2}(\alpha )}\|C\|^{2}}\) and \(M_{3}={ \frac{8\Gamma (2\alpha -1)}{4^{\alpha }\Gamma ^{2}(\alpha )}\|A\|^{2}}\).
Proof
The solution of the system (2.1) satisfies the following equation:
Using the Cauchy–Schwartz inequality, we get
Taking the expectation on the two sides, one has
Then
where \({M_{1}= \frac{8\Gamma (2\alpha -1)}{4^{\alpha }\Gamma ^{2}(\alpha )}\|B\|^{2}}\), \({M_{2}=\frac{4}{\Gamma ^{2}(\alpha )}\|C\|^{2}}\) and \(M_{3}={ \frac{8\Gamma (2\alpha -1)}{4^{\alpha }\Gamma ^{2}(\alpha )}\|A\|^{2}}\).
Thus,
For \(t\in [0,\nu ]\), we obtain
By the Gronwall inequality, we have
Therefore, we obtain
where \({l_{1}(\nu )= (4+\frac{M_{1}}{2}(1-e^{-2\nu })+ \frac{M_{2}\nu ^{2\alpha -1}}{2\alpha -1} )e^{(M_{3}+2)\nu }}\).
For \(t\in [\nu ,2\nu ]\), we have
Using the Gronwall inequality, we get
Therefore, we obtain
where \({l_{2}(\nu )= (4+\frac{M_{1}}{2}(1-e^{-2(2\nu )})l_{1}( \nu )+\frac{M_{2}(2\nu )^{2\alpha -1}}{2\alpha -1}l_{1}(\nu ) )e^{(M_{3}+2)(2 \nu )}}\).
For \(t\in [0,(k+1)\nu ]\), \(k\in [0,m]\), we have
Using the Gronwall inequality, we have
Therefore, we obtain
where \({l_{k+1}(\nu )= (4+\frac{M_{1}}{2}(1-e^{-2(1+k)\nu })l_{k}( \nu )+\frac{M_{2}((1+k)\nu )^{2\alpha -1}}{2\alpha -1}l_{k}(\nu ) )e^{(M_{3}+2)(1+k)\nu }}\).
For all \(t\in [0,T]\), we get
which completes the proof. □
Remark 3.2
It is clear that \(l_{0}(\nu )\leq l_{1}(\nu )\leq \cdots \leq l_{T}(\nu )\).
Remark 3.3
In the case when \(0< T\leq \nu \), we obtain the FTS for the system (2.1) if we have the following condition:
Theorem 3.4
System (2.1) is FTSS with respect to \((\delta ,\varepsilon ,I)\), if the following condition \(\mathcal{A}\) is fulfilled:
where \({M_{1}= \frac{8\Gamma (2\alpha -1)}{4^{\alpha }\Gamma ^{2}(\alpha )}\|B\|^{2}}\), \({M_{2}=\frac{4}{\Gamma ^{2}(\alpha )}\|C\|^{2}}\) and \(M_{3}={ \frac{8\Gamma (2\alpha -1)}{4^{\alpha }\Gamma ^{2}(\alpha )}\|A\|^{2}}\).
Proof
By inequality (3.3), we get the following estimation:
Thus,
Let \({h(t)=e^{-2t}\mathbb{E}\|y(t)\|^{2}}\), then we obtain, \(\forall t\in [0,T]\),
Let \({g(t)=\sup_{\theta \in [-\nu ,t]}h(\theta )}\), for all \(t\in [0,T]\).
We have, \(\forall s\in [0,T]\), \({h(s)\leq g(s)}\) and \({h(s-\nu )\leq g(s)}\).
Thus, for all \(t\in [0,T]\), we obtain
Therefore, using a change of variable \(v=t-s\), we have \(\forall \theta \in [0,t]\)
\({\theta \mapsto \int _{0}^{\theta }s^{2\alpha -2}g( \theta -s)\,ds}\) and \({\theta \mapsto \int _{0}^{\theta }g(s)\,ds}\) are two increasing functions because g is non-negative and increasing. Thus, we have \(\forall \theta \in [0,t]\)
Thus, we get \(\forall t\in [0,T]\)
Using the generalized Gronwall inequality (Corollary 2.3 in [8]), for \(t\in [0,T]\), we get
Then, for all \(t\in [0,T]\), we obtain
Therefore, for all \(t\in [0,T]\), we have
Then, if \({\mathbb{E}\|\overline{\varphi }\|^{2}<\delta }\) and condition \(\mathcal{A}\) hold, we have \({\mathbb{E}\|y(t)\|^{2}<\varepsilon , \forall t\in [0,T]}\).
The proof is therefore complete. □
4 Illustrative examples
Two illustrative examples, in this section, show the usefulness and interest of the main results.
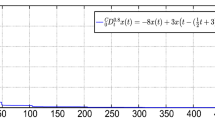
Example 4.1
Consider the following system:
where the initial condition is
It is easily to verify that \(\|A\| =0.2\), \(\|B\| = 0.5\), and \(\|C\| = 1\).
Let \(\delta =0.1\), \(\varepsilon =10\) and \(\nu =0.1\).
Based on the inequality (3.1) in Theorem 3.1 with \(\alpha = 0.9\), the calculated estimated time T of the system (4.2) is equal to \(T=0.3\), however, using Theorem 3.4, the computed estimated time T in inequality (3.9) is equal to \(T=0.23\).
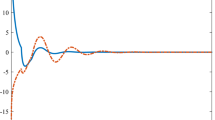
Example 4.2
Consider the following system:
where the initial condition is
It is easily to verify that \(\|A\| =1\), \(\|B\| = 0.1\), and \(\|C\| = 0.1\).
Let \(\delta =0.1\), \(\varepsilon =10\) and \(\nu =0.1\).
Based on the inequality (3.9) in Theorem 3.4 with \(\alpha = 0.6\), the calculated estimated time T of the system (4.1) is equal to \(T=1.27\), however, using Theorem 3.1, the computed estimated time T in inequality (3.1) is equal to \(T = 0.295\).
5 Conclusion
In this paper, finite-time stability of linear stochastic fractional-order systems with time delay has been investigated. Both the Gronwall lemma and stochastic calculus techniques have been used to study the finite-time stability. We have analyzed two illustrative examples to show the interest of our results. Note that the oldest two fractional derivatives in the literature are the Caputo derivative and the Riemann–Liouville fractional derivative. The choice of the Caputo derivative is addressed in our work because it is better for the stability analysis than the one defined by Riemann–Liouville. As a perspective of this work, an extension to other types of fractional derivative can be an interesting future research.
Availability of data and materials
Not applicable.
References
Adiguzel, R.S., Aksoy, U., Karapinar, E., Erhan, I.M.: On the solution of a boundary value problem associated with a fractional differential equation. Math. Methods Appl. Sci. (2020). https://doi.org/10.1002/mma.6652
Afshari, H., Kalantari, S., Karapinar, E.: Solution of fractional differential equations via coupled fixed point. Electron. J. Differ. Equ. 2015, 1 (2015)
Alqahtani, B., Aydi, H., Karapinar, E., Rakocevic, V.: A solution for Volterra fractional integral equations by hybrid contractions. Mathematics 7(8), 694 (2019). https://doi.org/10.3390/math7080694
Amato, F., Ambrosino, R., Cosentino, C., Tommasi, G.D.: Finite-time stabilization of impulsive dynamical linear systems. Nonlinear Anal. Hybrid Syst. 5, 89–101 (2011)
Ben Makhlouf, A., Nagy, A.M.: Finite-time stability of linear Caputo–Katugampola fractional-order time delay systems. Asian J. Control 22, 297–306 (2020)
Caraballo, T., Hammami, M., Mchiri, L.: Practical exponential stability of impulsive stochastic functional differential equations. Syst. Control Lett. 109, 43–48 (2017)
Feng, T., Wu, B.W., Liu, L., Wang, Y.E.: Finite-time stability and stabilization of fractional-order switched singular continuous-time systems. Circuits Syst. Signal Process. 38, 5528–5548 (2019)
Hussaina, S., Sadiaa, H., Aslama, S.: Some generalized Gronwall–Bellman–Bihari type integral inequalities with application to fractional stochastic differential equation. Filomat 33(3), 815–824 (2019)
Jmal, A., Ben Makhlouf, A., Nagy, A.M., Naifar, O.: Finite-time stability for Caputo-Katugampola fractional-order time-delayed neural networks. Neural Process. Lett. 50, 607–621 (2019). https://doi.org/10.1007/s11063-019-10060-6
Jmal, A., Naifar, O., Ben Makhlouf, A., Derbel, N., Hammami, M.A.: On observer design for nonlinear Caputo fractional order systems. Asian J. Control 20, 1533–1540 (2017)
Jmal, A., Naifar, O., Ben Makhlouf, A., Derbel, N., Hammami, M.A.: Sensor fault estimation for fractional-order descriptor one-sided Lipschitz systems. Nonlinear Dyn. 31, 1713–1722 (2017)
Jmal, A., Naifar, O., Ben Makhlouf, A., Derbel, N., Hammami, M.A.: Robust sensor fault estimation for fractional-order systems with monotone nonlinearities. Nonlinear Dyn. 90, 2673–2685 (2017)
Liang, J., Wu, B.W., Wang, Y.E., Niu, B., Xie, X.: Input-output finite-time stability of fractional-order positive switched systems. Circuits Syst. Signal Process. 38, 1619–1638 (2019)
Mao, X.: Stochastic Differential Equations and Applications. Ellis Horwood, Chichester (1997)
Mathiyalaganm, K., Balachandran, K.: Finite-time stability of fractional-order stochastic singular systems with time delay and white noise. Complexity 21, 370–379 (2019)
Moulay, E., Dambrine, M., Yeganefar, N., Perruquetti, W.: Finite-time stability and stabilization of time-delay systems. Syst. Control Lett. 57, 561–566 (2008)
Naifar, O., Ben Makhlouf, A., Hammami, M.A.: Comments on “Lyapunov stability theorem about fractional system without and with delay”. Commun. Nonlinear Sci. Numer. Simul. 30, 360–361 (2016)
Naifar, O., Ben Makhlouf, A., Hammami, M.A.: Comments on “Mittag-Leffler stability of fractional order nonlinear dynamic systems”. Automatica 75, 329 (2017)
Naifar, O., Ben Makhlouf, A., Hammami, M.A., Chen, L.: Global practical Mittag leffer stabilization by output feedback for a class of nonlinear fractional order systems. Asian J. Control 20, 599–607 (2017)
Naifar, O., Nagy, A.M., Ben Makhlouf, A., Kharrat, M., Hammami, M.A.: Finite time stability of linear fractional order time delay systems. Int. J. Robust Nonlinear Control 29, 180–187 (2019)
Wang, F., Chen, D., Zhang, X., Wu, Y.: Finite-time stability of a class of nonlinear fractional-order system with the discrete time delay. Int. J. Syst. Sci. 48, 984–993 (2017)
Wang, G., Liu, L., Zhang, Q., Yang, C.: Finite-time stability and stabilization of stochastic delayed jump systems via general controllers. J. Franklin Inst. 354, 938–966 (2014)
Xu, J., Sun, J.: Finite-time stability of nonlinear switched impulsive systems. Int. J. Syst. Sci. 44, 889–895 (2013)
Acknowledgements
Lassaad Mchiri and Mohamed Rhaima extend their appreciation to the Deanship of Scientific Research at King Saud University for funding this work through research group No. RG-1441-328.
Funding
Not applicable.
Author information
Authors and Affiliations
Contributions
All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mchiri, L., Ben Makhlouf, A., Baleanu, D. et al. Finite-time stability of linear stochastic fractional-order systems with time delay. Adv Differ Equ 2021, 345 (2021). https://doi.org/10.1186/s13662-021-03500-y
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-021-03500-y