
Abstract
In this paper, we focus on the synchronization of fractional-order coupled neural networks (FCNNs). First, by taking information on activation functions into account, we construct a convex Lur’e–Postnikov Lyapunov function. Based on the convex Lyapunov function and a general convex quadratic function, we derive a novel Mittag-Leffler synchronization criterion for the FCNNs with symmetrical coupled matrix in the form of linear matrix inequalities (LMIs). Then we present a robust Mittag-Leffler synchronization criterion for the FCNNs with uncertain parameters. These two Mittag-Leffler synchronization criteria can be solved easily by LMI tools in Matlab. Moreover, we present a novel Lyapunov synchronization criterion for the FCNNs with unsymmetrical coupled matrix in the form of LMIs, which can be easily solved by YALMIP tools in Matlab. The feasibilities of the criteria obtained in this paper are shown by four numerical examples.
Similar content being viewed by others


1 Introduction
The rapid development of modern network science and technology makes humans be aware of the importance and universality of the research on complex networks. Qualitative and quantitative analysis on various artificial and real complex network systems need to be conducted. As a typical complex network system, a neural network has a strong intelligence characteristic and learning functions, which plays an important role in artificial intelligence-related fields over the past few decades [1].
In the 1980s, Mandelbrot [2] found that fractional-order phenomena appeared in real life and engineering, which caused great repercussion both in engineering and academic circles. Different from classical calculus, fractional-order calculus has unique memorization and heredity. Thus fractional-order systems can more reasonably reflect the dynamical response process of the model [3]. In fact, since memory exists in the fractional-order derivatives and biological neurons, neurons in the human brain can be more accurately described and simulated by fractional-order neural networks. Nowadays, fractional-order neural networks play an important role in artificial intelligence-related fields, such as automatic control, intelligent robots, pattern recognition, and so on. An increasing number of scholars turn to the study on dynamical behaviors of fractional-order neural networks, and many excellent results are reported (see, e.g., [4–8] and references therein).
Synchronization of fractional-order neural networks, as a collective behavior, has received much attention and is extensively investigated [9–14]. In [9] the authors study the synchronization and robust synchronization issues for the FCNNs based on the general convex quadratic Lyapunov function. However, the synchronization criteria are in the form of nonlinear matrix inequalities (NLMIs), which brings certain difficulty in the solving process. In [10] the authors investigate the hybrid synchronization problem of two coupled complex networks with fractional-order dynamical nodes based on the general convex quadratic Lyapunov function by the fractional-order Lyapunov stability theorem. In [11] a Lyapunov function including fractional-order integral term is constructed to derive the synchronization stability conditions for Riemann–Liouville fractional-order delay-coupled complex neural networks. However, the relationship between node networks and coupling matrix is neglected.
Due to the complexity of fractional-order calculus theory, some existing synchronization criteria for fractional-order neural networks have not fully considered the information of FCNNs, such as activation functions and coupled matrix. Based on the fractional-order Lyapunov stability theory, Lyapunov functions play a key role in the synchronization discrimination of the fractional-order system and directly affect the conservatism of synchronization discrimination conditions. Constructing some Lyapunov functions including the information of activation function may be more reasonable and effective. Recently, the global Mittag-Leffler group consensus and group consensus in finite time for fractional-order multiagent systems are concerned in [15]. Under the fractional-order Filippov differential inclusion framework, by applying the Lur’e–Postnikov-type convex Lyapunov functional approach and Clarke’s nonsmooth analysis technique, some sufficient conditions are provided in terms of LMIs. However, the Lur’e–Postnikov Lyapunov function constructed in [15] requires that the activation function should be nondecreasing. In this paper, we remove this constraint. The activation function just needs to satisfy the general Lipschitz condition. Since the existing research methods have some limitations, further research is needed.
Motivated by the discussion above, in this paper, we study the synchronization of FCNNs. The results obtained enrich the theory of synchronization of FCNNs. The major contributions can be highlighted as follows:
-
The Lur’e–Postnikov Lyapunov function is extended to a general case suitable for the activation functions satisfying the generalized Lipschitz condition;
-
A novel Mittag-Leffler synchronization criterion is derived for the FCNNs with symmetrical coupled matrix in the form of LMIs. Then a robust Mittag-Leffler synchronization criterion is given for the FCNNs with uncertain parameters;
-
A novel Lyapunov synchronization criterion is derived for the FCNNs with unsymmetrical coupled matrix in the form of LMIs, which can be easily solved by YALMIP tools in Matlab;
-
The information of network node and coupling matrix is adequately considered in the synchronization criteria.
The paper is structured as follows. In Sect. 2, we present some definitions and main properties of Caputo fractional-order calculus. In Sect. 3, we present three novel synchronization criteria for different types of FCNNs in the form of LMIs. Simulation examples are given in Sect. 4. Conclusions are given in Sect. 5.
2 Preliminaries
To study the synchronization of FCNNs, we first provide some definitions of Caputo fractional-order calculus and some useful lemmas.
Definition 1
([16])
Let \(\alpha \in R^{+}\). The operator \(D^{-\alpha }\) defined on \(L_{1}[0,b]\) by
for \(0\leq t\leq b\) is called the Riemann–Liouville fractional-order integral of order α where Γ is the gamma function, \(\Gamma (\alpha )=\int ^{+\infty }_{0}t^{\alpha -1}e^{-t}\,dt\).
Definition 2
([16])
Let \(n-1\leq \alpha < n\), where \(n\in N^{+}\). The operator \(D^{\alpha }\) defined by
is called the Caputo fractional-order differential of order α.
Lemma 1
([17])
Let \(V:\Omega \rightarrow R\) and \(x:[0,\infty )\rightarrow \Omega \) be continuous differentiable functions, where \(\Omega \subset R^{n}\). Suppose that \(V(x(t))\) is convex over Ω and \(V(0)=0\). Then, for any time instant \(t\geq 0\),
Lemma 1 allows us to construct some more useful convex Lyapunov functions. Based on Lemma 1, the following propositions obviously hold.
Proposition 1
([18])
Let \(x:[0,\infty )\rightarrow \Omega \) be a continuous differentiable function, where \(\Omega \subset R^{n}\). Let \(P\in R^{n\times n}\) be a positive definite matrix. Then, for any time instant \(t\geq 0\),
Proposition 2
([19])
Let \(x:[0,\infty )\rightarrow R\) be a continuous differentiable function. Then, for any time instant \(t\geq 0\),
almost everywhere.
Proposition 3
([20])
Let \(f:R\rightarrow R\) and \(x:[0,\infty )\rightarrow R\) be continuous differentiable functions. Let f be a continuous nondecreasing function. Then, for any time instant \(t\geq 0\),
Moreover, we introduce Lemmas 2 and 3 for the discussion that follows.
Lemma 2
Let α and β be real column vectors of dimensions of \(n_{1}\) and \(n_{2}\), respectively. For real positive symmetric matrices \(\Omega _{1}\in R^{n_{1}\times n_{1}}\) and \(\Omega _{2}\in R^{n_{2}\times n_{2}}\), we have the following inequality for any matrix \(S\in R^{n_{1}\times n_{2}}\) satisfying :
Proof
The conclusion is obvious, and we omit the proof. □
This lemma is equivalent to the Moon inequality [21]. In this paper, we change its form for more convenient applications.
Lemma 3
([22])
Let \(x=0\) be an equilibrium point of system \(D^{\alpha }x(t)=f(t,x)\), \(0\in D\subset R^{n}\). Let \(V:[0,+\infty )\times D\rightarrow R\) be a continuously differentiable function that is locally Lipschitz in x and such that
where \(t\geq 0\), \(x\in D\), \(\alpha \in (0,1)\), and \(\alpha _{1}\), \(\alpha _{2}\), \(\alpha _{3}\), a, and b are arbitrary positive constants. Then \(x=0\) is Mittag-Leffler stable. Moreover, if \(\alpha _{3}=0\), then \(x=0\) is Lyapunov stable.
3 Main results
In this paper, we consider the synchronization of the following FCNNs:
where \(i=1,2,\ldots,N\), \(\alpha \in (0,1)\), N is the number of nodes, \(y_{i}(t)=(y_{i1}(t),y_{i2}(t),\ldots , y_{in}(t))^{T}\in R^{n}\) is the state vector of node i, \(g(y_{i}(t))=[g_{1}(y_{i1}(t)),g_{2}(y_{i2}(t)),\ldots , g_{n}(y_{in}(t))]^{T}\) with \(g_{i}(0)=0\) is the activation function of node i, \(J(t)\) denotes the external input, \(B=(B_{ij})_{n\times n}\) and \(0< C=\operatorname{diag}\{C_{1},C_{2},\ldots ,C_{n}\}\) are real matrices, \(0< d\in R\) denotes the overall coupling strength, \(A=(A_{ij})_{N\times N}\) is the coupled matrix of network, and \(\Gamma =(\Gamma _{ij})_{n\times n}\) corresponds to the inner coupling matrix.
Throughout this paper, we make the following assumption on the FCNNs.
Assumption 1
The activation function g is continuous and bounded. For any \(x_{1},x_{2}\in R\), \(x_{1}\neq x_{2}\), the activation functions \(g_{j}\) satisfy
where \(k_{j}^{+}\) and \(k_{j}^{-}\) are known constant values. For convenience, we denote \(K^{+}=\operatorname{diag}\{k_{j}^{+}\}\), \(K^{-}=\operatorname{diag}\{k_{j}^{-}\}\), \(k_{j}=\max \{|k_{j}^{+}|,|k_{j}^{-}|\}\), and \(K=\operatorname{diag}\{k_{j}\}\).
Remark 1
Assumption 1 for activation functions is introduced to investigate the Mittag-Leffler synchronization of the FCNNs to guarantee the existence and uniqueness of the equilibrium point. Most of the common activation functions satisfy the generalized Lipschitz condition, such as A linear excitation function, threshold or step excitation function, and so on.
Next, for easier understanding, we give the definition of synchronization.
Definition 3
The FCNNs (9) realize synchronization if
3.1 Mittag-Leffler synchronization analysis for FCNNs with symmetrical coupled matrix
In this section, we consider FCNNs (9) with symmetrical coupled matrix, that is, \(A=(A_{ij})_{N\times N}\) is the coupled matrix of network satisfying \(A_{ii}=-\sum^{N}_{j=1,j\neq i}A_{ij}\); \(A_{ij}=A_{ji}> 0\) if \(i\neq j\) and there is a connection between nodes i and j, otherwise, \(A_{ij}=0\), \(i,j=1,2,\ldots,N\).
Defining \(\bar{y}(t)=\frac{1}{N}\sum^{N}_{i=1}y_{i}(t)\) and the error vector \(e_{i}(t)=y_{i}(t)-\bar{y}(t)\), we have
Thus the synchronization of FCNNs (9) with symmetrical coupled matrix is equivalent to the stability of system (12).
Notice that if we take \(e(t)=[e_{1}^{T}(t),e_{2}^{T}(t),\ldots,e_{N}^{T}(t)]^{T}\), then system (12) can be written as
where \(E_{N}=(E_{ij})_{N\times N}\) with all \(E_{ij}=1\).
For the synchronization of FCNNs (9) with symmetrical coupled matrix, we have the following result.
Theorem 1
FCNNs (9) with symmetrical coupled matrix realize Mittag-Leffler synchronization if there exist positive definite matrices P, \(\Theta _{1}\), \(\Delta _{1}\), \(\Gamma _{2}\), \(\Psi _{2}\in R^{n\times n}\), positive definite diagonal matrices \(D_{i}\ ( i=1, 2, 3,4)\), \(\Theta _{2}\), \(\Delta _{2}\), \(\Gamma _{1}\), \(\Lambda _{1}\), \(\Lambda _{2}\), \(\Phi _{1}\), \(\Phi _{2}\), \(\Psi _{1}\in R^{n\times n}\) and a matrix \(\Omega \in R^{Nn\times Nn}\) such that the following linear matrix inequalities hold:
where \(\Pi =-I_{N}\otimes (PC+C^{T}P) +I_{N}\otimes \Theta _{1}+I_{N} \otimes (K\Theta _{2}K)+dA\otimes (P\Gamma +\Gamma ^{T}P) -I_{N} \otimes [(K^{+}D_{1}-K^{-}D_{2}+KD_{3}+KD_{4})C +C^{T}(K^{+}D_{1}-K^{-}D_{2}+KD_{3}+KD_{4})]+I_{N} \otimes \Delta _{1} +I_{N}\otimes (K\Delta _{2}K) +dA\otimes [(K^{+}D_{1}-K^{-}D_{2}+KD_{3}+KD_{4}) \Gamma + \Gamma ^{T}(K^{+}D_{1}-K^{-}D_{2}+KD_{3}+KD_{4})) +I_{N} \otimes (K\Gamma _{1}K)+I_{N}\otimes \Gamma _{2}+I_{N}\otimes (K \Lambda _{1}K)+I_{N}\otimes (K\Lambda _{2}K)+I_{N}\otimes (K\Phi _{1}K)+I_{N} \otimes (K\Phi _{2}K)+NI_{N}\otimes (K\Psi _{1}K)+\bar{A}\otimes ( \Gamma ^{T} \Psi _{2}\Gamma )+\Omega (E_{N}\otimes I_{n})+(E_{N} \otimes I_{n})\Omega ^{T}\) and \(\bar{A}=\operatorname{diag}\{\sum_{i=1}^{N}A_{i1}^{2},\sum_{i=1}^{N}A_{i2}^{2},\ldots, \sum_{i=1}^{N}A_{iN}^{2}\}\).
Proof
Construct the Lyapunov function
where
To prove the synchronization of FCNNs (9) with symmetrical coupled matrix, the process involves three steps.
Step 1: We prove that \(V(e(t))\) is positive.
Obviously, \(V_{1}(e(t))\) is positive by the positive definiteness of P. Next, we prove that \(V_{2}(e(t))\) is nonnegative.
From Assumption 1 we have
Then
which leads to \(\int _{0}^{e_{ij}(t)}[k_{j}^{+}s-g_{j}(s)]\,ds\geq 0\). Similarly, \(\int _{0}^{ e_{ij}(t)}[g_{j}(s)-k_{j}^{-}s]\,ds\geq 0\), \(\int _{0}^{e_{ij}(t)}[k_{j}s-g_{j}(s)]\,ds\geq 0\), and \(\int _{0}^{e_{ij}(t)}[g_{j}(s)+k_{j}s]\,ds\geq 0\).
Step 2: We prove that there exist positive constants \(\alpha _{1}\) and \(\alpha _{2}\) satisfying \(\alpha _{1}\|e(t)\|^{2}\leq V(e(t))\leq \alpha _{2}\|e(t)\|^{2}\).
Obviously, we have \(\lambda _{\min }\{P\}\|e(t)\|^{2}\leq V(e(t))\leq [\lambda _{\max }\{P \}+8 \max_{1\leq k\leq 4, 1\leq j\leq n}\{d_{kj}\} \cdot \max_{1\leq j\leq n}\{ k_{j}\}]\|e(t)\|^{2}\).
Step 3: We prove that there exists a positive constant \(\alpha _{3}\) such that \(D^{\alpha }V(e(t))\leq -\alpha _{3}\|e(t)\|^{2}\).
For \(V_{1}(e(t))\), by Proposition 1 we have
Noticing that \(\sum_{i=1}^{N}e_{i}^{T}(t)=0\), we have
For \(2\sum_{i=1}^{N}e_{i}^{T}(t)PB(g(y_{i}(t))-g(\bar{y}(t)))\), by Lemma 2 there exist a positive definite matrix \(\Theta _{1} \) and a positive definite diagonal matrix \(\Theta _{2} \) such that
and
So
For \(V_{2}(e(t))\), based on Proposition 3, we have
where \(D_{k}=\operatorname{diag}\{d_{k1}, d_{k2},\ldots, d_{kn}\}\), \(k=1,2,3,4\).
By simple calculation we get
Similarly to (20), there exist a positive definite matrix \(\Delta _{1} \) and a positive definite diagonal matrix \(\Delta _{2} \) such that
and
From (23) we have
For \(2\sum_{i=1}^{N}g^{T}(e_{i}(t))[D_{1}-D_{2}+D_{3}-D_{4}]Ce_{i}(t)\), there exist a positive definite matrix \(\Gamma _{1} \) and a positive definite diagonal matrix \(\Gamma _{2} \) such that
and
For \(2\sum_{i=1}^{N}g^{T}(e_{i}(t))[-D_{1}+D_{2}-D_{3}+D_{4}]B[g(y_{i}(t))-g( \bar{y}(t))]\), we have a positive definite matrix \(\Lambda _{1} \) and a positive definite diagonal matrix \(\Lambda _{2} \) such that
and
For \(\frac{2}{N}\sum_{i=1}^{N}\sum^{N}_{j=1}g^{T}(e_{i}(t))[-D_{1}+D_{2}-D_{3}+D_{4}]B[g( \bar{y}(t))-g(y_{j}(t))]\), we have a positive definite matrix \(\Phi _{1} \) and a positive definite diagonal matrix \(\Phi _{2} \) such that
and
For \(2d\sum_{i=1}^{N}\sum^{N}_{j=1}g^{T}(e_{i}(t))[-D_{1}+D_{2}-D_{3}+D_{4}]A_{ij} \Gamma e_{j}(t)\), we have a positive definite matrix \(\Psi _{1}\) and a positive definite diagonal matrix \(\Psi _{2} \) such that
and
where \(\bar{A}=\operatorname{diag}\{\sum_{i=1}^{N}A_{i1}^{2},\sum_{i=1}^{N}A_{i2}^{2},\ldots, \sum_{i=1}^{N}A_{iN}^{2}\}\).
Since \(\sum_{i=1}^{N}e_{i}(t)=0\), we get
where \(\Omega \in R^{Nn\times Nn}\).
From (21), (24), and (26)–(30) we have
So there exists a positive constant \(\alpha _{3}\) such that \(D^{\alpha }V(e(t))\leq -\alpha _{3}\|e(t)\|^{2}\) if \(\Pi <0\). Therefore by Lemma 3 FCNNs (9) with symmetrical coupled matrix realizes synchronization under condition (13).
The proof is completed. □
3.2 Mittag-Leffler synchronization analysis for FCNNs with uncertain parameters
FCNNs may contain uncertain parameters due to the existence of environmental noises or model errors in many circumstances. In this section, we consider the following FCNNs with uncertain parameters:
where \(A=(A_{ij})_{N\times N}\) is the coupled matrix of network that satisfies \(A_{ij}=A_{ji}> 0\) if \(i\neq j\) and there is a connection between node i and node j, otherwise, \(A_{ij}=0\), and \(A_{ii}=-\sum^{N}_{j=1,j\neq i}A_{ij}\), \(i=1,2,\ldots,N\).
For the uncertain parameters \(\Delta C(t)\) and \(\Delta B(t)\) in (32), we make the following assumption.
Assumption 2
The parametric uncertainties \(\Delta C(t)\) and \(\Delta B(t)\) are of the form
where M, \(H_{C}\), and \(H_{B}\in R^{n\times n}\) are known real constant matrices, and the uncertain matrix \(F(t)\) is unknown real time-varying matrix satisfying \(F^{T}(t)F(t)\leq I_{n}\).
To study the synchronization of (32), we need the following lemma.
Lemma 4
([26])
For given matrices Y, D, and E of proper dimensions, assume that Y satisfies \(Y^{T}=Y\). Then
for any F satisfying \(F^{T}F\leq I\) if and only if there is a real number \(\varepsilon >0\) such that
For the synchronization of FCNNs (32), we have the following result.
Theorem 2
FCNNs (32) realize Mittag-Leffler synchronization if there exist positive definite matrices P, \(\Theta _{1}\), \(\Delta _{1}\), \(\Gamma _{2}\), \(\Psi _{2}\in R^{n\times n}\), positive definite diagonal matrices \(D_{i}\ ( i=1, 2, 3, 4)\), \(\Theta _{2}\), \(\Delta _{2}\), \(\Gamma _{1}\), \(\Lambda _{1}\), \(\Lambda _{2}\), \(\Phi _{1}\), \(\Phi _{2}\), \(\Psi _{1}\in R^{n\times n}\), a matrix \(\Omega \in R^{Nn\times Nn}\), and positive real numbers \(\varepsilon _{1}\), \(\varepsilon _{2}\), \(\varepsilon _{3}\), \(\varepsilon _{4}\), \(\varepsilon _{5}\), \(\varepsilon _{6}\), \(\varepsilon _{7}\) such that the following linear matrix inequalities hold:
where \(\Pi _{1}= \Pi _{2}= [I_{N}\otimes H_{C}^{T}][I_{N}\otimes H_{C}]\), and Π is the same as in Theorem 1.
Proof
By Theorem 1 FCNNs (32) realize Mittag-Leffler synchronization if the following matrix inequalities hold:
Let \(e_{1}=[ I_{n}, O]\) and \(e_{2}=[O, I_{n}]\). Then
Lemma 4 implies that if and only if there exists \(\varepsilon _{\Theta }>0\) such that
By the Schur complement theorem, if and only if
So is equivalent to
for some \(\varepsilon _{\Theta }>0\).
Similarly, if and only if
for some \(\varepsilon _{\Delta }>0\);
if and only if
for some \(\varepsilon _{3}>0\);
if and only if
for some \(\varepsilon _{4}>0\); and
if and only if
for some \(\varepsilon _{5} >0\).
Moreover, for \(\Pi ^{*}\), we have
where \([I_{N}\otimes F^{T}(t)][I_{N}\otimes F(t)]\leq I_{Nn}\).
Thus by the Schur complement theorem, \(\Pi ^{*}<0\) is equivalent to
for some \(\varepsilon _{6}>0\) and \(\varepsilon _{7}>0\), where \(\Pi _{1}= \Pi _{2}= [I_{N}\otimes H_{C}^{T}][I_{N}\otimes H_{C}]\).
By Lemma 3 FCNNs (32) realize synchronization under condition (36).
The proof is completed. □
3.3 Synchronization analysis for FCNNs with unsymmetrical coupled matrix
In this section, we consider FCNNs (9) with unsymmetrical coupled matrix, that is, \(A=(A_{ij})_{N\times N}\) is an unsymmetrical coupled matrix representing the coupling strength and topological structure of the networks.
Let \(\bar{y}(t)=\frac{1}{N}\sum^{N}_{i=1}y_{i}(t)\) and define the error vector \(e_{i}(t)=y_{i}(t)-\bar{y}(t)\). From FCNNs (9) we have
The synchronization of FCNNs (9) with unsymmetrical coupled matrix is equivalent to the stability of system (48).
Theorem 3
FCNNs (9) with unsymmetrical coupled matrix realize synchronization in the sense of Lyapunov if there exist positive definite matrices \(P\in R^{n\times n}\), positive definite diagonal matrices \(D_{i}\ ( i=1,2,3,4)\), positive semidefinite matrices \(\Theta _{i}\), \(\Delta _{i}\), \(\Gamma _{i}\), \(\Lambda _{i}\), \(\Phi _{i}\), \(\Psi _{i}\in R^{n\times n}\), \(i=1,2 \), and matrices \(\Omega _{1}\in R^{Nn\times Nn}\) such that the following linear matrix inequalities hold:
where \(\Pi =(I_{Nn}-\frac{E_{N}\otimes I_{n}}{N})[-I_{N}\otimes (PC+C^{T}P) +I_{N} \otimes \Theta _{1}+I_{N}\otimes (K\Theta _{2}K)-I_{N} \otimes ((K^{+}D_{1}-K^{-}D_{2}+KD_{3}+KD_{4})C +C^{T}(K^{+}D_{1}-K^{-}D_{2}+KD_{3}+KD_{4})) +I_{N}\otimes \Delta _{1}+I_{N} \otimes (K\Delta _{2}K) +I_{N}\otimes (K\Gamma _{1}K)+I_{N}\otimes \Gamma _{2}+I_{N}\otimes (K\Lambda _{1}K)+I_{N}\otimes (K\Lambda _{2}K) +I_{N}\otimes (K\Phi _{1}K)+I_{N}\otimes (K\Phi _{2}K)+NI_{N}\otimes (K \Psi _{1}K)](I_{Nn}-\frac{E_{N}\otimes I_{n}}{N}) +\operatorname{sym}\{\Omega _{1} (E_{N} \otimes I_{n})\}(I_{Nn}-\frac{E_{N}\otimes I_{n}}{N}) +\operatorname{sym}\{d(I_{Nn}- \frac{E_{N}\otimes I_{n}}{N})[\underline{A}\otimes ((P+K^{+}D_{1}-K^{-}D_{2}+KD_{3}+KD_{4}) \Gamma )]\} +d^{2}\underline{A}^{*}\otimes (\Gamma ^{T} \Psi _{2} \Gamma )\), \(\underline{A}=(A_{ij}-A_{\underline{j}})_{N\times N}\), \(A_{\underline{j}}=\frac{1}{N}\sum^{N}_{i=1}A_{ij}\), and \(\underline{A}^{*}=\operatorname{diag}\{\sum_{i=1}^{N}(A_{i1}-A_{ \underline{1}})^{2}, \sum_{i=1}^{N}(A_{i2}-A_{\underline{2}})^{2},\ldots, \sum_{i=1}^{N}(A_{iN}-A_{\underline{N}})^{2}\}\).
Proof
Construct the Lyapunov function
where
Proposition 1 implies
where \(A_{\underline{j}}=\frac{1}{N}\sum^{N}_{i=1}A_{ij}\).
Because \(\sum_{i=1}^{N}e_{i}^{T}(t)=0\), we get
By Lemma 2 there exist a positive definite matrix \(\Theta _{1}\) and a positive semidefinite matrix \(\Theta _{2}\) such that
and
So
where \(\underline{A}=(A_{ij}-A_{\underline{j}})_{N\times N}\).
Noting that \(e(t)=(I_{Nn}-\frac{E_{N}\otimes I_{n}}{N})y(t)\), we have
For \(V_{2}(e(t))\), by Proposition 3 we have
where \(D_{k}=\operatorname{diag}\{d_{k1}, d_{k2},\ldots, d_{kn}\}\), \(k=1,2,3,4\).
Similarly, there are a positive definite matrix \(\Delta _{1}\) and a positive semi-definite matrix \(\Delta _{2}\) such that
and
Simple calculation yields
There exist a positive definite matrix \(\Gamma _{1}\) and a positive semidefinite matrix \(\Gamma _{2}\) such that
and
Similarly, we have a positive definite matrix \(\Lambda _{1} \) and a positive semidefinite matrix \(\Lambda _{2} \) such that
and
By Lemma 2 we have a positive definite matrix \(\Phi _{1}\) and a positive semidefinite matrix \(\Phi _{2}\) satisfying the matrix inequalities
and
where \(\Phi _{1}\) and \(\Phi _{2}\) are diagonal matrices.
For \(2d\sum_{i=1}^{N}\sum^{N}_{j=1}g^{T}(e_{i}(t))[-D_{1}+D_{2}-D_{3}+D_{4}](A_{ij}-A_{ \underline{j}})\Gamma y_{j}(t)\), by Lemma 2 there exist a positive definite matrix \(\Psi _{1}\) and a positive semidefinite matrix \(\Psi _{2}\) such that
and
where \(\underline{A}^{*}=\operatorname{diag}\{\sum_{i=1}^{N}(A_{i1}-A_{ \underline{1}})^{2}, \sum_{i=1}^{N}(A_{i2}-A_{\underline{2}})^{2},\ldots, \sum_{i=1}^{N}(A_{iN}-A_{\underline{N}})^{2}\}\).
Combining (58) with (60)–(63) gives
Since \(\sum_{i=1}^{N}e_{i}^{T}(t)=0\), we have \(2y^{T}(t)\Omega _{1} (E_{N}\otimes I_{n})(I_{Nn}- \frac{E_{N}\otimes I_{n}}{N})y(t)=0\) for any matrix \(\Omega _{1}\in R^{Nn\times Nn}\). Then
So \(D^{\alpha }V(e(t))\leq 0\) if \(y^{T}(t)\Pi y(t)\leq 0\). Therefore by Lemma 3 FCNNs (9) with unsymmetrical coupled matrix realize synchronization in the sense of Lyapunov under condition (49). The proof is completed. □
The Lyapunov synchronization of the FCNNs with unsymmetrical coupled matrix in Theorem 3 is weaker than the Mittag-Leffler synchronization.
Remark 2
Each sufficient synchronization condition proposed in Theorems 1–3 includes several LMIs. The forms of sufficient synchronization conditions seem to be complicated, but they can be easily solved by Matlab. The sufficient conditions in Theorems 1–3 require \((0.5N^{2}+2.5)n^{2}+(14.5+0.5N)n\), \((0.5N^{2}+2.5)n^{2}+(14.5+0.5N)n+7\) and \((0.5N^{2}+2.5)n^{2}+(14.5+0.5N)n\) decision variables, respectively, where N stands for the number of nodes, and n is the dimension of the state vector for each node.
4 Numerical examples
In this section, we provide four numerical examples to confirm the correctness of the obtained synchronization criteria.
Example 1
Consider FCNNs (9) consisting of 5 identical 2-D fractional-order neural networks, where \(\alpha =0.97\), \(f_{j}(\xi )=\frac{|\xi +1|-|\xi -1|}{4}\ (j=1,2)\), \(d=0.7\),
It is clear that \(f_{j}\) satisy Assumption 1 with \(k_{j}^{-}=-0.5\) and \(k_{j}^{+}=0.5\). Solving LMIs in Theorem 1 by using LMI tools in Matlab, we get \(t_{\min }=-0.3441\). So the FCNNs in this example realize synchronization.
Take \(y_{11}(0)=0.2\), \(y_{12}(0)=-0.1\), \(y_{21}(0)=0.15\), \(y_{22}(0)=-0.3\), \(y_{31}(0)=-0.26\), \(y_{32}(0)=0.16\), \(y_{41}(0)=0.05\), \(y_{42}(0)=-0.07\), \(y_{51}(0)=0.1\), and \(y_{52}(0)=-0.19\). The trajectories of the state and error systems are shown in Figs. 1 and 2, respectively. Figure 2 shows that FCNNs (9) with coefficient (66) achieve synchronization.

State trajectories of the state system in Example 1

State trajectories of the error system in Example 1
Remark 3
This example was studied in [9]. The fractional-order neural network is synchronized under a pinning controller \(U(t)=Ke(t)\) with \(K=\operatorname{diag}\{0.8I,1.6I,O,O,O\}\). However, the synchronization criteria are in the form of NLMIs, which brings certain difficulty in the solving process. Differently from the method used in [9], Lemma 2 is adopted to get a synchronization criterion in the form of LMIs. Moreover, a novel convex Lyapunov function \(V_{2}\) is constructed to take into account the information of the activation functions.
Example 2
Consider FCNNs (9) with uncertain parameters consisting of 5 identical 2-D fractional-order neural networks, where \(\alpha =0.97\), \(f_{j}(\xi )=\frac{|\xi +1|-|\xi -1|}{4}\) (\(j=1,2\)), \(d=0.7\),
It is clear that \(f_{j}\) satisfy Assumption 1 with \(k_{j}^{-}=-0.5\) and \(k_{j}^{+}=0.5\). Solving LMIs in Theorem 2 by LMI tools in Matlab, we get \(t_{\min }= -0.2642\). So FCNNs with uncertain parameters realize synchronization.
Take \(y_{11}(0)=0.3\), \(y_{12}(0)=-0.2\), \(y_{21}(0)=0.15\), \(y_{22}(0)=-0.3\), \(y_{31}(0)=-0.15\), \(y_{32}(0)=-0.25\), \(y_{41}(0)=0.05\), \(y_{42}(0)=-0.07\), \(y_{51}(0)=0.1\), and \(y_{52}(0)=-0.1\). The trajectories of the state system are shown in Fig. 3. The trajectories of the error system are shown in Fig. 4. From Fig. 4 we can see that FCNNs with coefficient (67) are synchronized.

State trajectories of the state system in Example 2

State trajectories of the error system in Example 2
Example 3
Consider the FCNNs (9) with unsymmetrical coupled matrix consisting of 2 identical 2-D fractional-order neural networks, where \(\alpha =0.97\), \(f_{j}(\xi )=\frac{|\xi +1|-|\xi -1|}{4}\) (\(j=1,2\)), \(d=0.5\),
It is clear that \(f_{j}\) satisfy Assumption 1 with \(k_{j}^{-}=-0.5\) and \(k_{j}^{+}=0.5\).
Solving LMIs in Theorem 3 by YALMIP tools in Matlab, we get
Since Π is negative semidefinite, FCNNs with uncertain parameters in this example realize synchronization in the sense of Lyapunov.
Take \(y_{11}(0)=0.05\), \(y_{12}(0)=-0.05\), \(y_{21}(0)=0.2\), and \(y_{22}(0)=-0.2\). The trajectories of the state system are shown in Fig. 5. The trajectories of the error system are shown in Fig. 6. Figure 6 shows that FCNNs with coefficient (68) are synchronized.

State trajectories of the state system in Example 3

State trajectories of the error system in Example 3
Example 4
Consider FCNNs (9) consisting of 5 identical 2-D fractional-order neural networks. Let \(\alpha =0.97\), \(f_{j}(\xi )=\frac{|\xi +1|-|\xi -1|}{4}\ (j=1,2)\), \(d=0.7\),
It is clear that \(f_{j}\) satisfy Assumption 1 with \(k_{j}^{-}=-0.5\) and \(k_{j}^{+}=0.5\).
Since all conditions in Theorem 1 are satisfied, FCNNs in this example can realize synchronization.
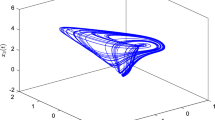
The trajectories of the state system are shown in Fig. 7. From Fig. 7 we see that FCNN system is unstable. The trajectories of the error system are shown in Fig. 8. Figure 8 shows that FCNNs with coefficient (69) realize synchronization.

State trajectories of the state system in Example 4

State trajectories of the error system in Example 4
5 Conclusions
In this paper, we study the synchronization of FCNNs. We construct some novel convex Lyapunov functions containing the activation function information, based on which, we present several novel Mittag-Leffler synchronization criteria for FCNNs with and without uncertain parameters. Then we establish a novel synchronization criterion in the sense of Lyapunov for FCNNs with unsymmetrical coupled matrix. The benefits of the synchronization criteria obtained in this paper are illustrated by four numerical examples. The global synchronization for stochastic dynamic networks [27, 28] and the synchronization in fixed or finite time for fractional-order network [29, 30] have attracted considerable attention in the past few decades. In the future, we will study the global synchronization of fractional-order stochastic neural networks basing on the event-triggered strategy.
Availability of data and materials
All the data and materials are available in this paper.
References
Peng, X., Wu, H., Cao, J.: Global nonfragile synchronization in finite time for fractional-order discontinuous neural networks with nonlinear growth activations. IEEE Trans. Neural Netw. Learn. Syst. 30, 2123–2137 (2019)
Mandelbort, B.: The Fractal Geometry of Nature. Freeman, New York (1983)
Liu, H., Pan, Y., Cao, J., Zhou, Y., Wang, H.: Positivity and stability analysis for fractional-order delayed systems: a T-S fuzzy model approach. IEEE Trans. Fuzzy Syst. 29, 927–939 (2021)
Li, Y., Hou, B.: Observer-based sliding mode synchronization for a class of fractional-order chaotic neural networks. Adv. Differ. Equ. 2018, 146 (2018)
Yao, X., Tang, M., Wang, F., Ye, Z. Liu, X.: New results on stability for a class of fractional-order static neural networks. Circuits Syst. Signal Process. 39, 5926–5950 (2020)
Yang, Y., He, Y., Wang, Y., Wu, M.: Stability analysis of fractional-order neural networks: an LMI approach. Neurocomputing 285, 82–93 (2018)
Wang, L., Wu, H., Liu, D., Boutat, D., Chen, Y.: Lur’e Postnikov Lyapunov functional technique to global Mittag-Leffler stability of fractional-order neural networks with piecewise constant argument. Neurocomputing 302, 23–32 (2018)
Zheng, M., Li, L., Peng, H., Xiao, J., Yang, Y., Zhang, Y., Zhao, H.: Finite-time stability and synchronization of memristor-based fractional-order fuzzy cellular neural networks. Commun. Nonlinear Sci. Numer. Simul. 59, 272–291 (2018)
Wang, S., Huang, Y., Ren, S.: Synchronization and robust synchronization for fractional-order coupled neural networks. IEEE Access 5, 12439–12448 (2017)
Ma, T., Zhang, J.: Hybrid synchronization of coupled fractional-order complex networks. Neurocomputing 157, 166–172 (2015)
Zhang, H., Ye, M., Ye, R., Cao, J.: Synchronization stability of Riemann–Liouville fractional delay-coupled complex neural networks. Phys. A, Stat. Mech. Appl. 508, 155–165 (2018)
Ruan, X., Wu, A.: Multi-quasi-synchronization of coupled fractional-order neural networks with delays via pinning impulsive control. Adv. Differ. Equ. 2017, 359 (2017)
Bao, H., Park, J., Cao, J.: Synchronization of fractional-order delayed neural networks with hybrid coupling. Complexity 21, 106–112 (2016)
Yang, S., Jiang, H., Hu, C., Yu, J.: Exponential synchronization of fractional-order reaction–diffusion coupled neural networks with hybrid delay-dependent impulses. J. Franklin Inst. 358, 3167–3192 (2021)
Zhang, Y., Wu, H., Cao, J.: Group consensus in finite time for fractional multiagent systems with discontinuous inherent dynamics subject to Hölder growth. IEEE Trans. Cybern. (2020). https://doi.org/10.1109/TCYB.2020.3023704
Diethelm, K.: The Analysis of Fractional Differential Equations. Springer, Berlin (2010)
Chen, W., Dai, H., Song, Y., Zhang, Z.: Convex Lyapunov functions for stability analysis of fractional order systems. IET Control Theory Appl. 11, 1070–1074 (2017)
Duarte-Mermoud, M., Aguila-Camacho, N., Gallegos, J., Castro-Linares, R.: Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 22, 650–659 (2015)
Zhang, S., Yu, Y., Wang, H.: Mittag-Leffler stability of fractional-order Hopfield neural networks. Nonlinear Anal. Hybrid Syst. 16, 104–121 (2015)
Song, K., Wu, H., Wang, L.: Lur’e–Postnikov Lyapunov function approach to global robust Mittag-Leffler stability of fractional-order neural networks. Adv. Differ. Equ. 2017, 232 (2017)
Moon, Y., Park, P., Kwon, W., Lee, Y.: Delay-dependent robust stabilization of uncertain state-delayed systems. Comput. Technol. Autom. 74, 1447–1455 (2001)
Li, Y., Chen, Y., Podlubny, I.: Mittag-Leffler stability of fractional order nonlinear dynamic systems. Automatica 45, 1965–1969 (2009)
Shu, Y., Liu, X., Wang, F., Qiu, S.: Further results on on exponential stability of discrete-time BAM neural networks with time-varying delays. Math. Methods Appl. Sci. 40, 4014–4027 (2017)
Shu, Y., Liu, X.: Improved results on guaranteed \(H_{\infty }\) state estimation of static neural networks with interval time-varying delay. J. Inequal. Appl. 2016, 48 (2016)
Wang, J., Wu, H.: Synchronization and adaptive control of an array of linearly coupled reaction–diffusion neural networks with hybrid coupling. IEEE Trans. Cybern. 44, 1350–1361 (2014)
Zhang, X., Zhong, G., Gao, X.: Matrix Theory in Systems and Control. Heilongjiang University Press, Harbin (2011) (in Chinese)
Zhao, W., Wu, H.: Fixed-time synchronization of semi-Markovian jumping neural networks with time-varying delays. Adv. Differ. Equ. 2018, 213 (2018)
Liu, W., Wu, H.: Stochastic finite-time synchronization for discontinuous semi-Markovian switching neural networks with time delays and noise disturbance. Neurocomputing 310, 246–264 (2018)
Liu, J., Wu, H., Cao, J.: Event-triggered synchronization in fixed time for semi-Markov switching dynamical complex networks with multiple weights and discontinuous nonlinearity. Commun. Nonlinear Sci. Numer. Simul. 90, 105400 (2020)
Liu, M., Wu, H., Zhao, W.: Event-triggered stochastic synchronization in finite time for delayed semi-Markovian jump neural networks with discontinuous activations. Comput. Appl. Math. 39, 118 (2020)
Acknowledgements
The authors would like to thank the editor and anonymous reviewers for their valuable comments and suggestions.
Funding
This work is partly supported by NSFC under grant Nos. 62006213 and 61773404, Key scientific research projects of colleges and universities in Henan Province No. 21A120010 and the science and technology research project of Henan Province No. 212102310053.
Author information
Authors and Affiliations
Contributions
All authors contributed equally and significantly in writing this paper. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no competing interests.
Consent for publication
This manuscript is approved by all authors for publication. I declare on behalf of my coauthors that the work described was original research that has not been published previously.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Wang, F., Wang, F. & Liu, X. Further results on Mittag-Leffler synchronization of fractional-order coupled neural networks. Adv Differ Equ 2021, 240 (2021). https://doi.org/10.1186/s13662-021-03389-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13662-021-03389-7